
Abstract
We consider the equations of linearised gravity on the Schwarzschild spacetime in a double null gauge. Applying suitably commuted versions of the conservation laws derived in earlier work of the second author we establish control on the gauge invariant Teukolsky quantities \(\upalpha ^{[\pm 2]}\) without any reference to the decoupled Teukolsky wave equation satisfied by these quantities. More specifically, we uniformly bound the energy flux of all first derivatives of \(\upalpha ^{[\pm 2]}\) along any outgoing cone from an initial data quantity at the level of first derivatives of the linearised curvature and second derivatives of the linearised connection components. Analogous control on the energy fluxes along any ingoing cone is established a posteriori directly from the Teukolsky equation using the outgoing bounds.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The linear Teukolsky equation of spin \(\pm 2\) associated with the 2-parameter family of Kerr spacetimes \(g_{M,a}\) plays a central role in understanding the dynamical stability properties of the Kerr family of black holes as solutions to the vacuum Einstein equations [32]. In Boyer–Lindquist coordinates it is given by
where the quantities \(\upalpha ^{[\pm 2]}\) are spin-weighted functions corresponding to the two “extremal” linearised null Riemann curvature components (with respect to the algebraically special null frame of Kerr) in the full linearisation of the Einstein equations near Kerr. Remarkably, the \(\upalpha ^{[\pm 2]}\) remain invariant both under infinitesimal coordinate diffeomorphisms and under infinitesimal frame changes, i.e. they only change quadratically in the linearisation parameter. Moreover, it is expected that vanishing of both \(\upalpha ^{[+2]}\) and \(\upalpha ^{[-2]}\) reduces the space of solutions of the full system of linearised Einstein equations to (the infinite dimensional family of) infinitesimal diffeomorphisms, frame changes and (the finite dimensional family of) linearised Kerr solutions [33]. These facts, together with the decoupled equation (1) that they satisfy, make quantitative bounds on \(\upalpha ^{[\pm 2]}\) an essential ingredient in many approaches to the stability problem [1, 4, 5, 13,14,15, 18, 22, 23, 30].
1.1 Previous results on the Teukolsky equation
The difficulty in establishing quantitative estimates for solutions of (1) is rooted in the equation itself not originating from a Lagrangian, which reflects in the fact that no conserved energy at the level of first derivatives is known for (1). Nevertheless, in the past decade a complete understanding of the global behaviour of solutions to the Teukolsky equation in the form of quantitative bounds in terms of initial data has been obtained, culminating in the recent [29, 30]. See also [27] for precise asymptotic decay rates. Progress started with a complete treatment of the Schwarzschild case in [14], where the authors prove (amongst other things) boundedness and integrated decay estimates for the Teukolsky equation. The key insight was a physical space version of the transformation theory of Chandrasekhar [7]: by applying a second order differential operator, the Teukolsky equation is transformed into a Regge-Wheeler-type equation, which does originate from a Lagrangian and for which estimates are known – in particular, there is a conserved energy! Estimates for the \(\upalpha ^{[\pm 2]}\) themselves then follow by interpreting the aforementioned transformation as two successive transport equations. The inherent loss of derivatives (resulting from integrating transport equations) can finally be recovered by elliptic estimates using the original Teukolsky equation leading to a uniform boundedness statement at the level of \(H^3\)-Sobolev norms for \(\upalpha ^{[\pm 2]}\). This strategy has since been generalised to the \(|a|\ll M\) case [13, 24] and, as already mentioned, recently to the full sub-extremal case \(|a|<M\) [30]. It should be stressed that there is a significant increase in complexity in the analysis for \(|a|<M\). In that case both the classical Teukolsky-Starobinski identities and the seminal result of Whiting [34], who proved mode stability for solutions of (1) (i.e. the absence of solutions which grow exponentially in time), constitute important ingredients in the analysis. See [2, 3, 28, 31] for further quantitative mode stability results and a discussion of their role in the stability problem.
1.2 Canonical energy and conservation laws of linearised gravity
In view of its non-Lagrangian structure, the Killing symmetries of the Kerr metric do not directly translate into conservation laws for the Teukolsky equation (1). There is nevertheless a sense in which the linearised Einstein equations inherit conservation laws. However, these are necessarily formulated at the level of the entire system of gravitational perturbations and hence involve many of the linearised Ricci-coefficients and curvature components, not the Teukolsky quantities alone. The most well-known approach to this is via the canonical energy, which originated in the work of Friedman [17] (see also [6, 8]) and was further developed some years ago by Hollands and Wald [20]. The main difficulty to successfully apply the resulting conservation laws, is to establish appropriate coercivity for the associated canonical energy on spacelike slices, a property that in view of the coupled nature of the Einstein equations is generally difficult to establish, even in a suitably chosen gauge. In full generality, this has remained an open problem that has so far prevented the direct use of the canonical energy for the stability problem.Footnote 1
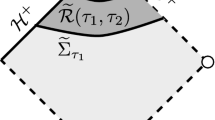
A resolution of this problem was proposed and carried out in the Schwarzschild case, \(a=0\), in [21]. Central to this approach are two conservation laws, which are established “by direct inspection" from the system of gravitational perturbations expressed in double null gauge. In the next step, these conservation laws are expressed for regions bounded by null cones as indicated in the Penrose diagram below.

The Penrose diagram of the exterior of Schwarzschild. In grey is indicated a region, bounded by null cones (shown in blue), on which we consider the conservation laws
The associated fluxes on these cones are then shown to be gauge invariant up to boundary terms on spheres, a fact that can be used – by adding an appropriately constructed pure gauge solution normalised to the outgoing cone \(C_{u_f}\) – to establish positivity of the fluxes after sending also the ingoing cone \(\underline{C}_{v_f}\) to null infinity.Footnote 2 This leads, for instance, to a priori control on the linearised shear of the outgoing null cone \(C_{u_f}\) (the shear remaining invariant under the addition of the pure gauge solution) and to a priori control on the flux radiated to null infinity and hence a weak form of linear stability. We remark that the conservation laws central to this approach have recently been shown to be in direct correspondence with the canonical energy [11, 12]. In particular, with every conservation law stated in [21] one can associate a suitably modified canonical energy in the sense of [20]. Moreover, novel conservation laws in the style of [21] can be derived from suitable modifications of the canonical energy in [20].
1.3 The main uniform boundedness theorem
While it is expected that the approach outlined in the previous section (using a double null gauge for the linearised equations, expressing the conservation laws on null cones and carrying out the limiting argument at null infinity) also leads to stability statements for axisymmetric perturbations in the Kerr case, we return in this paper to the Schwarzschild case. More specifically, we will revisit the conservation laws proven in [21] to provide a proof of boundedness for the Teukolsky quantities, which does not use the Teukolsky equation at all.
To state the main theorem we need some standard notation that the reader can pick up from the beginning of Sect. 2. In particular, we employ standard Eddington-Finkelstein \((u,v,\theta ,\phi )\)-coordinates on Schwarzschild and use the notion of \(S^2_{u,v}\)-tensors (instead of spin-weighted functions) to formulate the equations in a double null gauge. The quantities  ,
,  below are therefore symmetric traceless tensors and in direct one-to-one correspondence with the quantities \(\upalpha ^{[+2]}\), \(\upalpha ^{[-2]}\) introduced earlier.
below are therefore symmetric traceless tensors and in direct one-to-one correspondence with the quantities \(\upalpha ^{[+2]}\), \(\upalpha ^{[-2]}\) introduced earlier.
1.3.1 Controlling fluxes on outgoing cones
Our main theorem can be formulated as follows (see Theorem 3.7 for a more precise statement):
Theorem 1.1
Given a smooth solution of the system of gravitational perturbations on the Schwarzschild exterior arising from characteristic initial data on \(C_{u_0} \cup \underline{C}_{v_0}\), we have the following flux estimates for the gauge invariant Teukolsky quantities  and
and  on outgoing cones \(C_{u_f}\) with \(u_f \in [u_0, \infty )\):
on outgoing cones \(C_{u_f}\) with \(u_f \in [u_0, \infty )\):


where \({\mathbb {E}}^2_{data} (u_f)\) is an initial data energy on \(C_{u_0} \cup (\underline{C}_{v_0}\cap \{u \le u_f\} )\) with \(\sup _{u_f \in [u_0,\infty )} {\mathbb {E}}^2_{data} (u_f)<\infty \) for regular initial data.
We immediately remark that the fact that the transversal derivative of A is also appearing in the outgoing flux (2) arises from the fact that there is a Bianchi equation relating that derivative to linearised curvature and Ricci coefficients whose flux we do control.
The energy \( {\mathbb {E}}^2_{data} (u_f)\) appearing on the right hand side of (2)–(3) is defined in (69) below. It contains bounds on initial data quantities on the cones \(C_{u_0} \) and \(\underline{C}_{v_0} \cap \{u \le u_f\}\), which involve only first derivatives of linearised curvature components and up to second derivatives of connection coefficients.Footnote 3 Hence, from the point of view of regularity of the full system of gravitational perturbations, the estimates (2)–(3) may be viewed as honest boundedness statements at the \(H^1\)-level. It is in this sense that Theorem 1.1 improves previous boundedness results for the Teukolsky equation in terms of regularity: those results relied on the Chandrasekhar transformation theory, which requires certain third derivatives of  ,
,  to be bounded initially even to establish boundedness of the first order fluxes appearing in Theorem 1.1.
to be bounded initially even to establish boundedness of the first order fluxes appearing in Theorem 1.1.
We note that unlike (2), the estimate (3) degenerates strongly towards the horizon since it is  and
and  which extend regularly to the event horizon. This degeneration is expected given that we are proving boundedness of the T-energy for the system of gravitational perturbations. If one is willing to invoke the Teukolsky equation itself, one can exploit the redshift (at the cost of including a weighted initial data energy for
which extend regularly to the event horizon. This degeneration is expected given that we are proving boundedness of the T-energy for the system of gravitational perturbations. If one is willing to invoke the Teukolsky equation itself, one can exploit the redshift (at the cost of including a weighted initial data energy for  on the ingoing data cone \(\underline{C}_{v_0}\)) and obtain improved estimates leading finally to uniform boundedness of
on the ingoing data cone \(\underline{C}_{v_0}\)) and obtain improved estimates leading finally to uniform boundedness of  as desired. See Corollary 4.1 below for more details.
as desired. See Corollary 4.1 below for more details.
1.3.2 Controlling fluxes on ingoing cones
Having bounded the fluxes on arbitrary outgoing cones as in Theorem 1.1 it is easiest to obtain boundedness of the fluxes on arbitrary ingoing cones from energy estimates for the Teukolsky equation.Footnote 4 We present the result for the quantity A here. We first define the ingoing characteristic flux naturally associated with the wave equation for A (see (155)) and determined by a globally timelike vectorfield which behaves like the timelike Killing field T asymptotically:

Using the estimate (2) of Theorem 1.1 in conjunction with an energy estimate for A we then obtain:
Corollary 1.2
Under the assumptions of Theorem 1.1 we have also the following estimate
See Sect. 4 for the analogous statement for \(\underline{A}\) and the detailed proofs.
1.3.3 Pointwise boundedness
We finally observe that the estimate (2) immediately implies

From the fact that the equations of linearised gravity are invariant under suitable commutations with angular momentum operators one may obtain angular commuted versions of the estimates (2) and (6) at the cost of a higher order angular commuted energies on the right hand side. Commuting twice in this way one obtains from (6) an \(L^\infty \)-estimate on  through Sobolev embedding on the sphere. As this is standard, we will omit the details. There are analogous statements for
through Sobolev embedding on the sphere. As this is standard, we will omit the details. There are analogous statements for  , which a priori degenerate near the horizon but can be improved using the redshift effect. See Sect. 4.6.
, which a priori degenerate near the horizon but can be improved using the redshift effect. See Sect. 4.6.
1.4 The main ideas of the proof
We now indicate the main ideas to prove the estimates of Theorem 1.1 focussing on the estimate (2). We provide a discussion supplemented by some schematic formulae (using notation introduced later in the paper) hoping that readers familiar with the double null formalism can directly grasp the underlying ideas. The main steps are as follows:
-
(1)
Apply the conservation laws and the coercivity argument of [21] to appropriate angular commuted equations of linearised gravity (this exploits the spherical symmetry of the background) to estimate additional quantities in the gauge adapted to the cone \(C_{u_f}\), i.e. where coercivity is manifest. This leads, for instance, to control of angular derivatives of
 ,
,  ,
,  on the outgoing cone in the notation of this paper.
on the outgoing cone in the notation of this paper. -
(2)
Apply the conservation laws and the coercivity argument of [21] to the T-commuted equations of linearised gravity (this exploits the stationarity of the background) to estimate additional quantities in the gauge adapted to the cone \(C_{u_f}\). This leads, for instance, to control of the flux of
 in the notation of this paper. The main difficulty in this step is that in the gauge adapted to the cone, coercivity of the outgoing flux is no longer manifest as certain cross-terms appearing in the flux no longer vanish after commutation with T (since T is not tangent to \(C_{u_f}\)). However, the bad terms can be controlled invoking the fluxes from Step 1 after inserting null structure equations.
in the notation of this paper. The main difficulty in this step is that in the gauge adapted to the cone, coercivity of the outgoing flux is no longer manifest as certain cross-terms appearing in the flux no longer vanish after commutation with T (since T is not tangent to \(C_{u_f}\)). However, the bad terms can be controlled invoking the fluxes from Step 1 after inserting null structure equations. -
(3)
Use the relevant transport equations in the linearised null structure equations to estimate additional quantities in the gauge adapted to the cone \(C_{u_f}\). For instance,
 can be estimated on the outgoing cone \(C_{u_f}\) using only the fluxes from Step 1 above.
can be estimated on the outgoing cone \(C_{u_f}\) using only the fluxes from Step 1 above. -
(4)
Combine the control on quantities in the gauge adapted to the outgoing cone \(C_{u_f}\) to estimate the gauge invariant quantities
 and
and  . For instance, we can write schematically in the notation of this paper (ignoring any weights in r and at the horizon):
. For instance, we can write schematically in the notation of this paper (ignoring any weights in r and at the horizon): 
where we have inserted the null structure equation for
 and used
and used  . Since we control the flux of all quantities in the gauge adapted to the cone \(C_{u_f}\) on the right, we control the flux of
. Since we control the flux of all quantities in the gauge adapted to the cone \(C_{u_f}\) on the right, we control the flux of  in the gauge adapted to the cone \(C_{u_f}\) and hence – by gauge invariance – in any gauge.
in the gauge adapted to the cone \(C_{u_f}\) and hence – by gauge invariance – in any gauge.
 ,
,  ,
,  on the outgoing cone in the notation of this paper.
on the outgoing cone in the notation of this paper. in the notation of this paper. The main difficulty in this step is that in the gauge adapted to the cone, coercivity of the outgoing flux is no longer manifest as certain cross-terms appearing in the flux no longer vanish after commutation with T (since T is not tangent to
in the notation of this paper. The main difficulty in this step is that in the gauge adapted to the cone, coercivity of the outgoing flux is no longer manifest as certain cross-terms appearing in the flux no longer vanish after commutation with T (since T is not tangent to  can be estimated on the outgoing cone
can be estimated on the outgoing cone  and
and  . For instance, we can write schematically in the notation of this paper (ignoring any weights in r and at the horizon):
. For instance, we can write schematically in the notation of this paper (ignoring any weights in r and at the horizon): 
 and used
and used  . Since we control the flux of all quantities in the gauge adapted to the cone
. Since we control the flux of all quantities in the gauge adapted to the cone  in the gauge adapted to the cone
in the gauge adapted to the cone Of course keeping track of the weights in r and \(\Omega ^2=1-\frac{2M}{r}\) as well as regularity is one of the technical challenges in the proof. Moreover, the above argument does not produce control on derivatives of  . These are obtained in a similar fashion using Bianchi and null structure equations with control on T-derivatives of certain curvature components on the outgoing cone.
. These are obtained in a similar fashion using Bianchi and null structure equations with control on T-derivatives of certain curvature components on the outgoing cone.
1.5 Final comments
1.5.1 The gauge adapted to the cone \(C_{u_f}\)
We comment briefly on the gauge adapted to the cone \(C_{u_f}\) that is employed to establish Theorem 1.1, which is the gauge of [21], where further details can be found. The main idea is to add a pure gauge solution that achieves the normalisation (59) for the linearised quantities on a fixed late outgoing cone \(C_{u_f}\) thereby making the flux on \(C_{u_f}\) appearing in the conservation law coercive. Note that this normalisation is different from the one used in [14] (where the solution is normalised at the horizon itself) but converges to the latter in the limit as \(u_f \rightarrow \infty \). Of course, in the context of [14] estimates on  had already been obtained from the transformation theory (independently of any gauge choice) while the premise of the present paper is precisely to prove such estimates on any cone \(C_{u_f}\).
had already been obtained from the transformation theory (independently of any gauge choice) while the premise of the present paper is precisely to prove such estimates on any cone \(C_{u_f}\).
1.5.2 Applications and open directions
One way to interpret Theorem 1.1 is as a boundedness statement at the \(H^1\)-level of curvature, which improves on the \(H^3\) statements obtained through the transformation theory introduced in [14]. From the point of view of the stability problem, an immediate question is whether Theorem 1.1 can be used in conjunction with the Teukolsky equation to also derive an integrated local energy decay estimate at the level of first derivatives of the Teukolsky quantities. If this could be done, then combining with Theorem 1.1 one could potentially avoid the transformation theory entirely to prove decay for the Teukolsky quantities with the additional benefit of producing results in lower regularity. Related to this, one may also ask whether the way to exploit the conversation laws presented here can be used to improve on (the regularity of) the scattering theory for the Teukolsky equations as developed in [25, 26, 35], which so far also relies on the Chandrasekhar transformations.
A further interesting direction is to try to generalise the argument to spacetime dimensions larger than four. Since the conservation laws persist in higher dimensions (but the decoupling of the Teukolsky quantities does not) following the strategy of this paper may lead to genuinely new boundedness results and a more robust approach to establish stability results.
Finally, one would like to generalise the results to the case of axisymmetric perturbations of the Kerr metric, where in view of the absence of superradiance, positivity of the fluxes can reasonably be expected. There are various difficulties starting from the angular operators no longer commuting trivially and the required algebraic manipulations being much more challenging. We leave this for future work.
2 Preliminaries
We only provide the minimal set-up here to make the paper self-contained. The reader should consult [14, 21] for details and more background.
2.1 The Schwarzschild background
2.1.1 Coordinates
We cover the exterior region of the Schwarzschild spacetime by double null Eddington–Finkelstein coordinates \((u,v,\theta ,\phi )\in {\mathbb {R}}^2\times {S}^2_{u,v}\) with
where \((t,r,\theta ,\phi )\) are the standard Schwarzschild coordinates. The Schwarzschild metric in \((u,v,\theta ,\phi )\) coordinates is

where \({{\gamma }}\) is the standard metric on the unit 2-sphere. In these coordinates constant v or u level sets, which we denote \(\underline{C}_{v}\) and \(C_u\), are ingoing or outgoing null hypersurfaces, respectively. Strictly speaking, the coordinates \((u,v,\theta ,\phi )\) do not cover the future event horizon, \(\mathcal {H}^+\), or future null infinity, \(\mathcal {I}^+\). However, formally we may parameterise the future event horizon as \((\infty ,v,\theta ,\phi )\) and future null infinity as \((u,\infty ,\theta ,\phi )\).
2.1.2 Null frames and \(S^2_{u,v}\)-tensors
We recall the standard future directed ingoing and outgoing null directions,
which may be completed to a local null frame (a basis for the tangent space at each point) by choosing a local frame \(\{e_A\}_{A=1,2}\) tangent to the double null spheres \(S^2_{u,v}\).
A major role in this paper will be played by (covariant) tensors on \(S^2_{u,v}\), called \(S^2_{u,v}\)-tensors in short. A covariant \(S^2_{u,v}\)-tensor may be identified with a covariant spacetime tensor that vanishes when it acts on the vector fields \(e_3\) or \(e_4\). Two types of \(S^2_{u,v}\)-tensors are particularly important in this work, namely \(S^2_{u,v}\) one-forms and \(S^2_{u,v}\) symmetric-traceless 2-tensors.
2.1.3 Background Ricci and curvature quantities
Using notation standard from [10], we record the non-vanishing connection coefficients of Schwarzschild with respect to the above null frame. They are

The only non-vanishing null Weyl curvature component is
Finally, for  we denote the connection coefficients by
we denote the connection coefficients by  and the Gaussian curvature by \(K=\frac{1}{r^2}\).
and the Gaussian curvature by \(K=\frac{1}{r^2}\).
2.1.4 Killing fields
The Schwarzschild spacetime is static. We denote the Killing vector field associated to staticity with T, which in double null Eddington Finkelstein coordinates given by
Additionally, the Schwarzschild spacetime is spherically symmetric, so SO(3) acts by isometry. We define a basis of angular momentum operators \(\Omega _1, \Omega _2, \Omega _3\) which generate the Lie algebra \(\mathfrak {so}(3)\) by demanding that in the standard coordinates \((\theta ,\phi )\) on the sphere we have
2.1.5 Norms and inner products
For \(\Theta ,\Phi \in \Gamma \big (\bigotimes ^n_{i=1}TS^2_{u,v}\big )\) we define

and the following \(L^2\)-inner product on the spheres \(S^2_{u,v}\):
where \(\varepsilon _{S^2}\) denotes the induced volume form on \(S^2\). This induces the \(L^2\)-norm on the sphere \(S^2_{u,v}\),
2.1.6 Differential operators on \(S^2_{u,v}\)
Let \(\Theta \) be a p-covariant \(S^2_{u,v}\)-tensor field. We define the projected covariant derivative  ,
,  ,
,  by extending \(\Theta \) trivially to a spacetime p-covariant tensor field and projecting onto the local frame \(\{e_A\}\) for \(S_{u,v}^2\). One can then check that the following formulas hold:
by extending \(\Theta \) trivially to a spacetime p-covariant tensor field and projecting onto the local frame \(\{e_A\}\) for \(S_{u,v}^2\). One can then check that the following formulas hold:

Additionally, we define

We define the projected Lie derivatives  ,
,  as
as

and note that

We define the \((p-1)\)-covariant tensor fields  and
and  as
as

where  is the induced volume form on \({S}^2_{u,v}\).
is the induced volume form on \({S}^2_{u,v}\).
For a \({S}_{u,v}^2\) one-form \(\xi \) we define

which is the formal \(L^2\)-adjoint of  . For \(f_1,f_2\in C^{\infty }(S^2_{u,v})\) we define
. For \(f_1,f_2\in C^{\infty }(S^2_{u,v})\) we define

which is the formal \(L^2\) adjoint of  , which maps an \(S^2_{u,v}\)-1-form to the pair of functions
, which maps an \(S^2_{u,v}\)-1-form to the pair of functions  .
.
Lastly, we denote the Laplacian on the \(S^2_{u,v}\) sphere by

Note that the Laplacian on the unit sphere \(S^2\), which we denote as \(\Delta _{S^2}\), is related by  .
.
2.1.7 Support on \(\ell \ge 2\) spherical harmonics
In this work, we will deal with functions, \(S^2_{u,v}\) one-forms and \(S^2_{u,v}\) symmetric-traceless 2-tensors that have support on \(\ell \ge 2\). For a function f to be supported on \(\ell \ge 2\) this simply means that f has vanishing projection on the \(\ell =0,1\) spherical harmonics. For a \(S^2_{u,v}\) one-form, \(\xi \), we note that there exists unique decomposition into two functions f, g supported on \(\ell \ge 1\) such that

A \(S^2_{u,v}\) one-form is supported on \(\ell \ge 2\) if f and g in this unique representation are supported on \(\ell \ge 2\).
For a \(S^2_{u,v}\) symmetric-traceless 2-tensor, \(\Theta \), we note that there exists unique decomposition into two functions f, g supported on \(\ell \ge 2\) such that

Therefore, \(S^2_{u,v}\) symmetric-traceless 2-tensors are automatically supported on \(\ell \ge 2\).
We remind the reader if a function on \(S^2_{u,v}\) has vanishing spherical mean (as is the case for functions supported on \(\ell \ge 2\)) then the Poincaré inequality holds

This will be used liberally throughout this work.
2.1.8 Angular identities
Lemma 2.1
We have the following identities for the angular momentum operators defined in (8):

Proof
Direct computation noting that  \(\quad \square \)
\(\quad \square \)
Proposition 2.2
We have the following identities for Lie derivatives of products of \(S^2_{u,v}\) tensor fields:

Proof
Since \(\Omega _k\) are Killing, one can compute that for a \(S^2_{u,v}\) covariant tensor field of rank n,

The result now follows after using Lemma 2.1 and the basic identity  \(\quad \square \)
\(\quad \square \)
2.2 The equations of linearised gravity
The system of linearised gravitational perturbations in double null gauge is encoded by the linearised metric quantities

the linearised connection coefficients

and the linearised curvature components

As in [21], we will speak of a solution \(\mathscr {S}\) to the system of gravitational perturbations to mean a a collection of quantities

satisfying the system (13)–(40) below, which we call the system of linearised gravity on the Schwarzschild background.Footnote 5 It consists of the following equations (see [14] for a derivation):


















along with the linearised Bianchi identities,










2.3 Pure gauge solutions
There exist special solutions to the system of gravitational perturbations above which correspond to infinitesimal coordinate transformations preserving the double null form of the metric. These are called pure gauge solutions of the system of gravitational perturbations. A particular subset of them is identified in the following lemma, which is proven as Lemma 6.1.1 of [14]. Recall the notation  , so \(\Delta _{S^2}\) is the Laplacian on the unit sphere with metric \(\gamma \).
, so \(\Delta _{S^2}\) is the Laplacian on the unit sphere with metric \(\gamma \).
Lemma 2.3
For any smooth function \(f=f\left( v,\theta ,\phi \right) \), the following is a pure gauge solution of the system of gravitational perturbations:

and

We will call f a gauge function.
Remark 2.4
One can write down the analagous lemma for pure gauge solutions generated by a smooth function \(f=f(u,\theta ,\phi )\) (see Lemma 6.1.2 in [14]).
2.4 The class of solutions
We now define the class of (smooth) solutions of the system of gravitational perturbations that we wish to consider in this paper. We first recall from [21] the notion of a partially initial data normalised solution, see Definition 3.2 of [21]:
Definition 2.5
We call \(\mathscr {S}\) a partially initial data normalised solution supported on \(\ell \ge 2\) of the system of gravitational perturbations if \(\mathscr {S}\) is supported on \(\ell \ge 2\) and the initial data on \(C_{u_0} \cup \underline{C}_{v_0}\) satisfies


We note that the first two conditions on the sphere \(S^2_{\infty ,{v_0}}\) are evolutionary along the event horizon while the second one is evolutionary along null infinity. Furthermore, for a partially initial data normalised solution, the quantity (and angular derivatives thereof)

extends regularly to the event horizon in the limit \(u \rightarrow \infty \). This is Proposition 3.1 of [21].
We also recall Definition 3.4 of [21], which we modify slightly here to include also higher derivatives in (43), as in this paper we will need to study up to two commutations of the equations.
Definition 2.6
We call a solution \(\mathscr {S}\) extendible to null infinity if the following weighted quantities of \(\mathscr {S}\) have well-defined finite limits on null infinityFootnote 6 for some \(0<s<1\)

In addition, denoting an arbitrary representative of the quantities in (42) by \(\mathcal {Q}\), we demand that also  has a well-defined limit on null infinity for all \(i+j \le 2\), and that for any fixed \(u_f\) with \(u_0<u_f<\infty \) the estimate
has a well-defined limit on null infinity for all \(i+j \le 2\), and that for any fixed \(u_f\) with \(u_0<u_f<\infty \) the estimate

holds with the constant \(C\left[ u_f\right] \) depending only on \(u_f\) (and the initial data) but not on v.
In this paper we will consider smooth solutions of the system of gravitational perturbations that are partially initial data normalised supported on \(\ell \ge 2\) and extendible to null infinity.
Remark 2.7
It follows from the well-posedness theory of the system of gravitational perturbations [14, 21] that there is essentially no restriction in considering this class of solutions. In particular, given a general solution to the system of gravitational perturbations arising from asymptotically flat (to sufficiently high order) initial data, we can make the solution partially initial data normalised by adding a pure gauge solution which is computable directly from the initial data and the solution thus constructed will be extendible to null infinity.
For completeness, we collect also the weighted quantities which extend regularly to the event horizon \(\mathcal {H}^+\) for our class of solutions. The quantity  extends regularly to \(\mathcal {H}^+ \cap \{v \ge v_0\}\) for any \(i+j+k \ge 0\) provided
extends regularly to \(\mathcal {H}^+ \cap \{v \ge v_0\}\) for any \(i+j+k \ge 0\) provided

Finally, in view of (42) we will sometimes allow ourselves to refer to quantities \(\xi \) “on null infinity” formally as \(\xi (u,\infty ,\theta ,\phi )\) or refer to the sphere “\(S^2_{u_f,\infty }\)” instead of carrying the corresponding limits through the already complicated computations. The procedure is always to carry out all computations for finite \(v_f\) and to take the limit \(v_f \rightarrow \infty \) in the very end when (42) can be exploited. All this is always performed for a compact u range, so that no issues with commuting limits ever arise.
2.5 The conservation laws
In this section we recall the conservation laws from [21]. To state them in a uniform manner that allows for commutation with Killing vectors, we first define, for given \(i, j \in {\mathbb {N}} \cup \{0\}\) and any tuple \(\mathbf{{k}}=(k_1,k_2, \ldots k_j)\) with each \(k_s \in \{1,2,3\}\), the (Killing) commutation operator

Note that \(\mathcal {K}^{i,(k_1,\ldots ,k_j)}\) maps a (0, k) covariant \(S^2_{u,v}\)-tensors to a (0, k) covariant \(S^2_{u,v}\)-tensor. We denote by \(|\textbf{k}|=j\) the length of the tuple \(\textbf{k}\).
Let now \(\mathscr {S}\) be a smooth solution of the system of gravitational perturbations. For any \(u_0\le u_1<u_2 \le \infty \) and \(v_0\le v_1 < v_2 \le \infty \) we define the (commuted) fluxes


Additionally, we denote


The above fluxes are related by the following conservation law:
Proposition 2.8
For any \(u_0<u_1< u_2<\infty \) and \(v_0< v_1<v_2 < \infty \) we have the conservation laws
and
Proof
Direct computation as in [21]. Note that the projected Lie-derivatives commute trivially through all equations so the proof is identical for the commuted versions. \(\square \)
Remark 2.9
One can simplify the fluxes in (46) and (47) to

where we use the notation \([X]_{a}^b=X(b)-X(a)\), with

In view of Proposition 2.8 one has the analogous conservation law for \(\check{F}\). Whilst this is a remarkably simple form of the conservation law it runs into issues with obtaining the optimal regularity result. Indeed, if one is not concerned with regularity, one could use this conservation law to obtain uniform boundedness.
2.5.1 Changing gauge on the outgoing cone
We next recall from [21] how the outgoing fluxes transform under the addition of a pure gauge solution of the type in Lemma 2.3, namely that they are invariant up to boundary terms on spheres:
Proposition 2.10
Let \(\mathscr {S}\) be a solution of the system of gravitational perturbations. Let \(f\left( v,\theta ,\phi \right) \) be a smooth gauge function generating a pure gauge solution \(\mathscr {G}\) of the system of gravitational perturbations as in Lemma 2.3. Finally, set \(\mathscr {S} = \tilde{\mathscr {S}} + \mathscr {G}\) thereby defining a new solution \(\tilde{\mathscr {S}}\). Then the flux on fixed constant-u hypersurfaces satisfies
with


Here the subscripts \(\mathscr {S}\) or \(\tilde{\mathscr {S}}\) indicate whether the geometric quantity is associated with the solution \(\mathscr {S}\) or \(\tilde{\mathscr {S}}\). In other words, the difference of the fluxes in the old and in the new gauge is a pure boundary term.
Remark 2.11
There is an analogous proposition to Proposition 2.10 for the incoming cone.
2.6 Useful identities involving the vector field T
We finally collect some identities that follow directly from the system of gravitational perturbations and will be used later in the proof. In fact, the reader may already anticipate their use as the expressions below will appear naturally in the cross-terms of the fluxes (46)–(49).
Proposition 2.12
We have the following general identities for T applied to \(\mathscr {S}\):

and


which combine to give

We have the following general identities for \(T^2\) applied to \(\mathscr {S}\):


and

Proof
These follow from elementary computations using the equations of Sect. 2.2. \(\square \)
3 Estimates on Any Outgoing Cone
We now let  be a partially initial data normalised solution supported on \(\ell \ge 2\) which is extendible to null infinity. Given a cone \(C_{u_f}\) (\(u_0 \le u_f < \infty \)) we will first construct from
be a partially initial data normalised solution supported on \(\ell \ge 2\) which is extendible to null infinity. Given a cone \(C_{u_f}\) (\(u_0 \le u_f < \infty \)) we will first construct from  a solution
a solution  , where \(\mathscr {G}_f\) is a pure gauge solution as in Lemma 2.3, normalised to the cone \(C_{u_f}\). We will determine f and hence \(\mathscr {G}_f\) in Sect. 3.1. We will then define appropriate energies for the solution(s) in Sect. 3.2 and be able to state the main theorems in Sect. 3.3. The remainder of this section is then concerned with the proof.
, where \(\mathscr {G}_f\) is a pure gauge solution as in Lemma 2.3, normalised to the cone \(C_{u_f}\). We will determine f and hence \(\mathscr {G}_f\) in Sect. 3.1. We will then define appropriate energies for the solution(s) in Sect. 3.2 and be able to state the main theorems in Sect. 3.3. The remainder of this section is then concerned with the proof.
3.1 The gauge normalised to the outgoing cone
Given a \(u_f \in (u_0, \infty )\), we fix an outgoing cone \(C_{u_f}\). We defineFootnote 7

where

We note \(f\left( v_0, \theta ,\phi \right) =\frac{r}{2\Omega ^2}f_0 (u_f, \theta , \phi )\) and recall from (41) that \(\Omega ^{-2} f_0(u_f, \theta , \phi )\) extends regularly to the horizon as \(u_f \rightarrow \infty \) for an initial data normalised solution. Note also that in view of Definition 2.6, \(\frac{f}{r}\) extends regularly to infinity. As mentioned above, we denote from now on the original solution by  , and by
, and by  the solution
the solution  , which is normalised to the cone \(C_{u_f}\) in the following sense:
, which is normalised to the cone \(C_{u_f}\) in the following sense:
Proposition 3.1
The geometric quantities of the solution  have the following properties:
have the following properties:

Proof
In the following we suppress the angular dependence of all quantities in the notation. From Lemma 2.3 we have

The Raychauduri equation (20) then gives  on \(C_{u_f}\). Hence, from Lemma 2.3, that
on \(C_{u_f}\). Hence, from Lemma 2.3, that

where we use that  along \(C_{u_f}\) and, \(f(v_0)=\frac{r}{2\Omega ^2}f_0\).
along \(C_{u_f}\) and, \(f(v_0)=\frac{r}{2\Omega ^2}f_0\).
The last identity in (59) follows from taking a  derivative of
derivative of  and using equation (16). \(\quad \square \)
and using equation (16). \(\quad \square \)
For future reference we already note that along the cone \(C_{u_f}\)

and also

As an immediate consequence, for \( i\ge 2\) and \(j \ge 0\) we have the limits

3.2 The energies
3.2.1 The master energies along the cone \(C_{u_f}\)
We define the master energies for the solution  along the cone \(C_{u_f}\).
along the cone \(C_{u_f}\).
For \(i=0,1,2\)

For \(i=0,1\)

3.2.2 The initial data energies
We define for \(i=0,1,2\) the energies of the connection coefficients

as well for \(i=0,1\) the energies of the curvature components


We complement the above with energies for quantities in the  gauge on the initial data sphere \(S^2_{u_f,v_0}\):
gauge on the initial data sphere \(S^2_{u_f,v_0}\):

and

where as mentioned all quantities that appear above are in the  gauge and we denote
gauge and we denote
Remark 3.2
The data energies \({\mathbb {E}}^{i,0}_{data}[\Gamma ] (u_{f})\), \({\mathbb {E}}^{i,0}_{data} [\mathcal {R}](u_f)\), \({\mathbb {E}}^{0,1}_{data} [\mathcal {R}](u_f)\) defined above are not necessarily coercive. What we will show successively in the proof is that these energies are indeed coercive provided a large constant (depending only on M) times an appropriate \({\mathbb {D}}^i_{data}\)-energy is added. This is familiar from [21]. Alternatively, the aforementioned data energies can be made manifestly coercive by suitably normalising the initial data gauge.
Remark 3.3
Note that we have \({\mathbb {D}}^1_{data}(\infty ,v_0)=0\) and \({\mathbb {D}}^2_{data}(\infty ,v_0)=0\) for regular data.
Remark 3.4
The energy \({\mathbb {D}}^1_{data}\) contains up to first angular derivatives of connection coefficients and \(\Delta _{S^2} f_0\), which involves second angular derivatives. The reason we have included the latter in \({\mathbb {D}}^1_{data}\) is that \(\Delta _{S^2} f_0\) will play a distinguished role in the proof and could be brought to vanish by normalising the initial data gauge slightly differently, namely with respect to sphere \(S^2_{u_f,v_0}\) instead of \(S^2_{\infty ,v_0}\).
Remark 3.5
To appreciate the structure of \({\mathbb {D}}_{data}^2(u_f,v_0)\) note that the terms in the first line involve (besides \(\Delta _{S^2} f_0\) in \({\mathbb {D}}_{data}^1(u_f,v_0)\) as mentioned) only first derivatives of Ricci coefficients and curvature components. The terms in the second line involve first derivatives of the mass aspect functions and a renormalised second derivative of  . Importantly, control on these quantities on the double null spheres can be propagated in evolution at the basic regularity level considered here, namely fluxes of up to one derivative of curvature in \(L^2\). This is well-known from [10] in the non-linear context. Similarly, the terms in the third line involve (norms of) inner products on double null spheres which can be propagated in evolution along the cones. Note that one derivative of curvature on spheres cannot in general be propagated without loss of regularity which is why we have retained the inner products.
. Importantly, control on these quantities on the double null spheres can be propagated in evolution at the basic regularity level considered here, namely fluxes of up to one derivative of curvature in \(L^2\). This is well-known from [10] in the non-linear context. Similarly, the terms in the third line involve (norms of) inner products on double null spheres which can be propagated in evolution along the cones. Note that one derivative of curvature on spheres cannot in general be propagated without loss of regularity which is why we have retained the inner products.
3.3 The main theorems
We are ready to state the main theorems. In the following we write \(X \lesssim Y\) if \(X \le C \cdot Y\) holds for a constant C depending only on M.
Theorem 3.6
Let  be a partially initial data normalised solution supported on \(\ell \ge 2\) of the system of gravitational perturbations that is also extendible to null infinity. Let
be a partially initial data normalised solution supported on \(\ell \ge 2\) of the system of gravitational perturbations that is also extendible to null infinity. Let  be as defined in Sect. 3.1 and recall the energies defined in Sect. 3.2. We have the estimate
be as defined in Sect. 3.1 and recall the energies defined in Sect. 3.2. We have the estimate

where
for a constant \(C_{max}\) depending only on M determined in the course of the proof.
Note that using Definition 2.6 and (44) near the horizon one easily verifies \(\sup _{u_f \in [u_0,\infty )} E^2_{data}(u_f)<\infty \) for the class of initial data considered, as was claimed in Theorem 1.1 of the introduction already.
The proof of Theorem 3.6 will be carried out in Sect. 3.5. Before that we provide some preliminary estimates in Sect. 3.4 that will be used in the proof.
From Theorem 3.6 we will easily deduce the following theorem, which concerns the gauge invariant quantities. It can be stated (but not proven) without reference to the solution  :
:
Theorem 3.7
Let  be a partially initial data normalised solution supported on \(\ell \ge 2\) of the system of gravitational perturbations that is also extendible to null infinity. We have the following estimates for the fluxes of the gauge invariant Teukolsky quantities
be a partially initial data normalised solution supported on \(\ell \ge 2\) of the system of gravitational perturbations that is also extendible to null infinity. We have the following estimates for the fluxes of the gauge invariant Teukolsky quantities  and
and  : along any outgoing cone \(C_{u_f}\) with \(u_f \in [u_0,\infty )\),
: along any outgoing cone \(C_{u_f}\) with \(u_f \in [u_0,\infty )\),


Here \( {\mathbb {E}}^2_{data} (u_f) \) is defined in (69).
Remark 3.8
Note the strong degeneration in \(\Omega ^2\) as actually  has a finite limit on \(\mathcal {H}^+\). Note also that the r-weights are not symmetric between the two estimates.
has a finite limit on \(\mathcal {H}^+\). Note also that the r-weights are not symmetric between the two estimates.
Theorem 3.7 will be proven in Sect. 3.6. Afterwards, we will use the estimates of Theorem 3.7 to obtain analogous estimates for the ingoing fluxes. See Corollary 4.1. For \(\underline{A}\) this will resolve the problem of degenerating \(\Omega ^2\)-weights mentioned in Remark 3.8.
3.4 Preliminaries: useful identities and estimates along \(C_{u_f}\)
Before we begin with the proof of Theorem 3.6, we prove in this section some preliminary estimates (both on quantities of the solution  and of the solution
and of the solution  ) along the cone \(C_{u_f}\) that will be used in the sequel. We begin by exploiting the fact that the mass aspect is conserved along \(C_{u_f}\) for the solution
) along the cone \(C_{u_f}\) that will be used in the sequel. We begin by exploiting the fact that the mass aspect is conserved along \(C_{u_f}\) for the solution  .
.
3.4.1 Bounding the mass aspect along \(C_{u_f}\)
Lemma 3.9
We have the following bounds for the lapse of the solution  along \(C_{u_f}\):
along \(C_{u_f}\):

Proof
We compute the propagation equation (valid for any solution)

For the solution  , the right hand side vanishes along \(C_{u_f}\) by Proposition 3.1
, the right hand side vanishes along \(C_{u_f}\) by Proposition 3.1

where in the last equality we use Lemma 2.3 and \(f(u_f,v_0)=\frac{r}{2\Omega ^2}f_0\). Therefore, one has

Since our solutions are supported on \(\ell \ge 2\), the last term can be estimated by the prenultimate one by standard elliptic estimates on \(S^2\) and the result hence follows from the definition of \({\mathbb {D}}^1_{data}(u_f,v_0)\). \(\quad \square \)
3.4.2 Bounds on the sphere \(S^2_{u_f,\infty }\)
Proposition 3.10
We have for \(i=0,1,2\) the following estimate on the limiting sphere \(S^2_{u_f,\infty }\):

Proof
We first observe that with our choice of f from (57) we have

The right hand side goes to zero as \(v \rightarrow \infty \) by the asymptotics of the solution in the initial data gauge (see (43)) and hence so does the left hand side. It follows that asymptotically we have the identity
Moreover, this identity continues to hold if we commute with derivatives tangential to the spheres. Now by definition of the pure gauge solution we have from Lemma 2.3 the relation

where we have used that  along \(C_{u_f}\). \(\quad \square \)
along \(C_{u_f}\). \(\quad \square \)
Proposition 3.11
We have for \(i=0,1,2\) the following estimates on the limiting sphere \(S^2_{u_f,\infty }\):


Proof
For the first estimate, we consider the linearised Gauss equation (30) multiply by \(r^2\) and take the limit \(v \rightarrow \infty \) along \(C_{u_f}\) to produce (using the asymptotics of the solution  following from Definition 2.6) the asymptotic identity
following from Definition 2.6) the asymptotic identity

Combining this with (75) of Proposition 3.10 the estimate (79) follows.
The second estimate follows from the fact that by definition of the gauge function in Lemma 2.3 we have the relation

Using now (79) for the first term on the right we obtain the second estimate. \(\quad \square \)
3.4.3 Estimating the gauge terms at infinity
In this section we estimate the terms \(\mathcal {G}^{i, \textbf{k}}_\Gamma \) and \(\mathcal {G}^{i, \textbf{k}}_\mathcal {R}\) appearing in Proposition 2.10 on the (asymptotic) sphere \(S^2_{u_f,\infty }\) as this is what will enter in the conservation laws applied later.
Proposition 3.12
On the sphere at infinity, \(S^2_{u_f,\infty }\), we have for \(i \ge 1\)

We also have for a constant C depending only on M,

For the \(\mathcal {G}^{i,\textbf{k}}_{\mathcal {R}}\)-terms we have the estimate

as well as the identities

and

Proof
Recall throughout that we are free to use the properties (59) when evaluating the expressions (52) and (53) in the proof.
The estimate (83) follows from (62) and the decay towards null infinity of the linearised quantities.
For the second estimate in (84), we have from (53) that

where one uses that  by Proposition 3.1. We then have
by Proposition 3.1. We then have

where we have applied Young’s inequality. So,

The conclusion then follows from (74).
To prove the estimate (85) we note that, using equation (62) and the decay towards null infinity of the linearised quantities, all terms except the ones in the first line of (53) vanish in the \(v\rightarrow \infty \) limit. So,

where we use the asymptotic relations  and
and  , valid for both
, valid for both  and
and  , on the asymptotic sphere \(S^2_{u_f, \infty }\). The last inequality of (85) follows from
, on the asymptotic sphere \(S^2_{u_f, \infty }\). The last inequality of (85) follows from  as \(v\rightarrow \infty \) which is a consequence of the general relation
as \(v\rightarrow \infty \) which is a consequence of the general relation  following in turn from Lemma 2.3 using that f is independent of u.
following in turn from Lemma 2.3 using that f is independent of u.
We now directly prove (87) as the proof of (86) is analogous but without commutation. We consider the expression (53) for \(\textbf{k}\) with \(|\textbf{k}|=1\) on the limiting sphere \(S^2_{u_f, \infty }\). Most terms vanish using the asymptotics of the solution  from (42) and the properties of the solution
from (42) and the properties of the solution  along \(C_{u_f}\) (in particular that
along \(C_{u_f}\) (in particular that  and that
and that  still extends regularly to infinity). We are left with
still extends regularly to infinity). We are left with

where we have used the angular identities of Proposition 2.2. For the first term on the right of (88) we recall that as \(v\rightarrow \infty \) along the cone \(C_{u_f}\) we have the asymptotic identity (81), so

The result now follows from inserting (75). \(\quad \square \)
3.4.4 Estimating the gauge terms at the data sphere in the conservation laws
In this section we estimate the terms \(\mathcal {G}^{i, \textbf{k}}_\Gamma \) and \(\mathcal {G}^{i, \textbf{k}}_\mathcal {R}\) appearing in Proposition 2.10 on the (data) sphere \(S^2_{u_f,v_0}\) as this is what will enter in the conservation laws applied later.
Proposition 3.13
On the data sphere \(S^2_{u_f,v_0}\) we have
Furthermore,
Remark 3.14
Note that we gain regularity here; naively one would expect to see third derivatives of Ricci coefficients in \(G_{\Gamma }^{2,0}\) but TTf (see (61)) allows us to gain regularity via integration by parts.
Proof
For the estimate (90), we have from Proposition 2.10 and the properties of  in (59):
in (59):

We can use Young’s inequality and Lemma 3.9 to conclude the result.
Turning to (93) and (94) we note from Proposition 2.10 and the properties of  in (59) for \(i=0,1\)
in (59) for \(i=0,1\)

where we have used (96) and the angular identity for scalars of Proposition 2.2. Up to a total divergence on \(S^2\) this reduces to

where we have inserted from (58) the definition of \(f_0\) for the terms involving  and
and  . The result is now immediate from Young’s inequality and that \(\Delta _{S^2} f_0\) controls all second angular derivatives of \(f_0\) by elliptic estimates (recall that \(f_0\) is supported on \(\ell \ge 2\)).
. The result is now immediate from Young’s inequality and that \(\Delta _{S^2} f_0\) controls all second angular derivatives of \(f_0\) by elliptic estimates (recall that \(f_0\) is supported on \(\ell \ge 2\)).
We now move onto the T-commuted estimates. Since we are working on the sphere \(S^2_{u_f,v_0}\), we will adopt the convention that \(\sim \) means equality up to r-weights and numerical factors, i.e. we only keep track of \(\Omega ^2\)-weights. We recall from (60) the identity

The reduction of the equations in Proposition 2.12 in the  -gauge to
-gauge to  -gauge on \(C_{u_f}\) is
-gauge on \(C_{u_f}\) is

and

where we use Lemma 2.3 and \(f(v_0)=\Omega ^{-2}rf_0\).
For the estimate (91), we use Young’s inequality to estimate the terms in \(\mathcal {G}^{1,\textbf{0}}_{\Gamma }(u_f,v_0)\) (everything is evaluated at \((u_f,v_0)\) and quantities appearing on the right-hand side are in the  gauge):
gauge):

and

where we have integrated by parts to achieve the last estimate. Therefore, all terms arising in \(G^{1,\mathbf{{0}}}_{\Gamma }(u_f,v_0)\) can be accounted for in \({\mathbb {D}}^1_{data}(u_f,v_0)\) establishing (91).
Before proving (92), we prove the estimate (95). In addition to the identities collected above for \(\mathcal {G}_{\Gamma }^{1,\textbf{0}}\) we require

where we use that  and the definition of \(f_0\) to write
and the definition of \(f_0\) to write

to deal with the  term arising in
term arising in  from Proposition 2.12.
from Proposition 2.12.
We can now estimate all terms that arise in \(\mathcal {G}_{\mathcal {R}}^{1,\textbf{0}} (u_f,v_0)\) via Young’s inequality (note that  on \(C_{u_f}\)):
on \(C_{u_f}\)):

where, once again, the latter two inequalities follow after integration by parts for angular derivatives on  and \(\Delta _{S^2}f_0\). We have therefore established (95).
and \(\Delta _{S^2}f_0\). We have therefore established (95).
We finally move to the \(T^2\)-estimate (92). We have from (61) the identity

From Proposition 2.12 we deduce (after converting quantities in the  gauge into
gauge into  gauge) on \(C_{u_f}\)
gauge) on \(C_{u_f}\)

Further,

We can now estimate the following terms in \(\mathcal {G}^{2,\textbf{0}}_{\Gamma }(u_f,v_0)\) via Young’s inequalty:

and, similarly, after integrating by parts,

To establish (92) note now that the terms involving one derivative of curvature on the right hand side, are either already contained as inner products in \({\mathbb {D}}^2_{data}(u_f,v_0)\) (see Sect. 3.2.2) or can be further reduced by an integration by parts. (The latter applies to the terms in the last line.) \(\quad \square \)
3.5 Proof of Theorem 3.6
We now embark on the proof of Theorem 3.6 proper. The proof will consist in applying, in a specific order, various appropriately commuted conservation laws. For each such conservation law, we will eventually send the ingoing cone \(\underline{C}_{v_f}\) to infinity, \(v_f \rightarrow \infty \). To simplify notation, we will, for the entire proof, denote by \(R(v_k)\) a smooth function defined on the cone \(\underline{C}_{v_f} \cap [u_0,u_f]\) (or one of the spheres \(S^2_{u_0,v_f}\), \(S^2_{u_f,v_f}\)) which vanishes in the limit \(v_f \rightarrow \infty \). The vanishing of \(R(v_k)\) is always a consequence of Definition 2.6. In this context, we will also make use of the following general identity

where all quantities on the right-hand side are evaluated at \(v_f\), which is proven as in [21], Section 4.1.2.
We first provide a short overview of the proof in Sect. 3.5.1 before carrying out each step in detail.
3.5.1 The logic of the Proof of Theorem 3.6
We first prove (step 1) that for a constant \(C_1\) depending only on M

This is essentially the estimate of [21]. Note that this implies, as a corollary, positivity of the initial data energy
appearing on the right, something that is not manifest from the form of the energy.
Next we prove (step 2) that for a constant \(C_2\) depending only on M

Note that this implies positivity of the initial data energy
In step 3, we use elliptic and transport estimates with the fluxes controlled in Steps 1 and 2 to deduce


In step 4, we show that there exists a constant \(C_3\) depending only on M such that

Note that this implies positivity of the initial data energy
In step 5, we show there exists a constant \(C_4\) depending only on M such that

Note that this implies positivity of the initial data energy
In step 6, we show there exists a constant \(C_5\) depending only on M such that

Note that this implies positivity of the initial data energy
In step 7, we use transport and elliptic estimates to prove estimates on

In step 8, we show there exists a constant \(C_6\) depending only on M such that

Note that this implies positivity of the initial data energy
Adding (111), (108), (106), (104), (100) and (98) and setting \(C_{max} = \sum _{i=1}^6 C_i\) yields the desired (68).
3.5.2 Step 1: proof of the uncommuted \(\Gamma \)-estimate
We first prove (98). The \(\Gamma \)-conservation law in the  gauge gives:
gauge gives:

where, using Proposition 2.10, we have

with

and invoking (97),

where we recall \(\textrm{R}(v_f)\rightarrow 0\) as \(v_f\rightarrow \infty \). Using the estimates on \(\mathcal {G}_{\Gamma }^{0,0}\) from (84) and (90), the identity (113) turns into the estimate (note the cancellation of the  -term at \((u_f,v_f)\))
-term at \((u_f,v_f)\))

Taking the limit \(v_f \rightarrow \infty \) and recalling definition (65) we deduce

3.5.3 Step 2: proof of the uncommuted \(\mathcal {R}\)-estimate
To prove (100), we apply the non-commuted second conservation law for  :
:

where

Therefore, combining and using equation (86) from proposition 3.12 gives

The first two terms on the right-hand side of (115) is also controlled by (114). The last two terms on the right hand side of (115) are equal to \({{\mathbb {E}}}_{data}^{0,0}[\mathcal {R}](u_{f})\). The remaining \(\mathcal {G}_{\mathcal {R}}^{0,0}\) is estimated by \({\mathbb {D}}^1_{data}(u_f,v_0)\) via (93). It follows that there exist constants \(\tilde{C}_1, \tilde{C}_2\) depending only on M such that

which is the required estimate (100).
3.5.4 Step 3: refined bounds on \(C_{u_{f}}\) via elliptic and transport equations I
We now use the control obtained so far to deduce further bounds for quantities on the cone \(C_{u_{f}}\). We begin with a flux bound:
Proposition 3.15
We have the following estimate along \(C_{u_f}\):

Proof
We begin with the bound on  . From Codazzi, we have
. From Codazzi, we have

hence

the right-hand side of which we already control from (98) and (100). Next recall the elliptic identity

which immediately yields the required estimate

We turn to the fluxes of  . In view of
. In view of  along \(C_{u_f}\) it suffices to show this for
along \(C_{u_f}\) it suffices to show this for  and in view of elliptic estimates to show this separately for
and in view of elliptic estimates to show this separately for  and
and  . The latter follows from (27) and control on the \(\sigma \)-flux in (100). For
. The latter follows from (27) and control on the \(\sigma \)-flux in (100). For  , Lemma 3.9 gives
, Lemma 3.9 gives

Since we have control on the flux of  through (100), we conclude
through (100), we conclude

as desired. \(\quad \square \)
We next deduce a few \(L^\infty _v\) bounds for spheres along the cone \(C_{u_f}\), all of which rely on the following basic transport lemma:
Lemma 3.16
Let \(\xi , \Xi \) be \(S^2_{u,v}\) tensors satisfying  along the cone \(C_{u}\) for some \(u_0 \le u \le \infty \). Then for any \(v \ge v_0\):
along the cone \(C_{u}\) for some \(u_0 \le u \le \infty \). Then for any \(v \ge v_0\):
Proof
See Lemma 3.1 of [9] for the first inequality and apply Cauchy–Schwarz using \(\Omega ^2=\partial _v r\) for the second. \(\quad \square \)
Proposition 3.17
We have  on the sphere \(S^2_{u_{f},\infty }\). Moreover we have
on the sphere \(S^2_{u_{f},\infty }\). Moreover we have

Proof
The claim  on \(S^2_{u_f,\infty }\) is immediate from the relation
on \(S^2_{u_f,\infty }\) is immediate from the relation  (see Lemma 2.3) and the fact that \(\frac{f}{r}\) is bounded in the limit as \(v \rightarrow \infty \). As for the relation at \(v=v_0\), we have
(see Lemma 2.3) and the fact that \(\frac{f}{r}\) is bounded in the limit as \(v \rightarrow \infty \). As for the relation at \(v=v_0\), we have  . Hence,
. Hence,

Finally, one applies the basic transport lemma to (28) resulting in the estimate

where we have applied Cauchy–Schwarz in the last step. Squaring and using (118) yields (117). \(\quad \square \)
We can also obtain uniform bounds along the cone \(C_{u_f}\) for  and
and  :
:
Proposition 3.18
We have


Proof
Estimate (119) follows from control on this quantity on the sphere \(S^2_{u_f,v_0}\) and using the transport equation (17), which, in  -gauge along \(C_{u_f}\), can be written as
-gauge along \(C_{u_f}\), can be written as

Applying Lemma 3.16 we have

Note that the first term on the right can be converted to  using Lemma 2.3 after which it is controlled by \({{\mathbb {D}}}_{data}^1(u_f,v_0)\). The estimate (119) now follows from the fluxes controlled in equation (100) and Proposition 3.15.
using Lemma 2.3 after which it is controlled by \({{\mathbb {D}}}_{data}^1(u_f,v_0)\). The estimate (119) now follows from the fluxes controlled in equation (100) and Proposition 3.15.
Estimate (120) is similar now using the transport equation (23), which along \(C_{u_f}\) takes the form

Applying Lemma 3.16 we have

Note that the first term on the right can be converted to  using Lemma 2.3 after which it is controlled by \({{\mathbb {D}}}_{data}^1(u_f,v_0)\). The estimate (120) follows from the fluxes controlled in (100) and Proposition 3.15. \(\quad \square \)
using Lemma 2.3 after which it is controlled by \({{\mathbb {D}}}_{data}^1(u_f,v_0)\). The estimate (120) follows from the fluxes controlled in (100) and Proposition 3.15. \(\quad \square \)
3.5.5 Step 4: proof of the angular commuted conservation law
We now prove (104). Let us fix the notation that

We apply the once angular commuted second conservation law (with summation):

where, using Proposition 2.10 and Proposition 2.2, we have

Therefore, combining, and using Proposition 3.12, gives

Taking the limit \(v_f \rightarrow \infty \) the desired estimate (104) follows after using that we have control over the terms on the right-hand side from (94) and (100) and Proposition 3.15.
3.5.6 Step 5: closing the once T-commuted \(\Gamma \)-estimate
We now prove (106). We apply the first conservation law now once \(\mathcal {L}_T\)-commuted:

By the change of gauge formula on the cone \(C_{u_f}\) of Proposition 2.10 and Proposition 3.12 we have

with the new flux given by

For the ingoing cone \(\underline{C}_{v_f}\) we have from (97) the limiting expression

Note the cancellation that is going to appear on the sphere \(S^2_{u_f,\infty }\) when taking the limit \(v_f \rightarrow \infty \) of (121) and inserting the above expressions.
We next evaluate the non-coercive cross-terms in (123). Using Proposition 2.12 in the  gauge we have (all quantities appearing on the right being with respect to the solution
gauge we have (all quantities appearing on the right being with respect to the solution  )
)




We therefore have

with the last step following from Proposition 3.17, 3.18 and 3.15 as well as the fluxes controlled by (100).
We conclude from (121) and (91) after inserting the previous estimates and taking the limit \(v_f \rightarrow \infty \)

The estimate (106) now follows after recalling the definition (65).
3.5.7 Step 6: closing the once T-commuted \(\mathcal {R}\)-estimate
We now prove (108). We apply the second conservation law now once \(\mathcal {L}_T\)-commuted:

By the change of gauge formula on the cone \(C_{u_f}\) of Proposition 2.10 we have

with the new flux given by

Using (43) we also have the limiting flux

We estimate (plugging in the expressions (124)–(127) in the integrand) the non-coercive terms in (130):

where we use (106) to estimate the  -flux. In summary, using also the estimates for \(\mathcal {G}^{1,0}_{\mathcal {R}}\) from (95) and (85) (the latter in conjunction with Proposition 3.17) we deduce
-flux. In summary, using also the estimates for \(\mathcal {G}^{1,0}_{\mathcal {R}}\) from (95) and (85) (the latter in conjunction with Proposition 3.17) we deduce

The estimate (108) follows after recalling the definition (66).
3.5.8 Step 7: refined bounds on \(C_{u_f}\) via transport equations II
With (108) proven we now obtain control for the flux of angular derivatives of  :
:
Proposition 3.19
We have the estimates

Proof
For the bound on  we note that the Codazzi equation implies
we note that the Codazzi equation implies

By standard elliptic estimates the Laplacian controls all second derivatives up to lower order terms which are in turn controlled by Proposition 3.15. The right hand side of (132) is easily controlled since  vanishes on \(C_{u_f}\) in
vanishes on \(C_{u_f}\) in  -gauge and the remaining terms are controlled by Proposition 3.15 and (104).
-gauge and the remaining terms are controlled by Proposition 3.15 and (104).
For the bound on  we compute
we compute

to conclude (note  vanishes along \(C_{u_f}\) in the
vanishes along \(C_{u_f}\) in the  -gauge)
-gauge)

The result follows after multiplying with \(r^4 \Omega ^2\) and integrating using (108), (104) and the bound (119). \(\quad \square \)
We next prove a higher order version of Proposition 3.17:
Proposition 3.20
We have  on the sphere \(S^2_{u_f,\infty }\). Moreover, we have
on the sphere \(S^2_{u_f,\infty }\). Moreover, we have

and

We also have the top order bound

Proof
The estimate (135) is proven as the estimate (117) in Proposition 3.17 with one angular commutation which we leave to the reader.
For (136), one can compute from Bianchi and commuting partials that in the  gauge along \(C_{u_f}\)
gauge along \(C_{u_f}\)

From Lemma 3.16 we deduce the estimate

The flux is controlled using (100), Proposition 3.19, (117) and (119) while for the data term we can use

whose right-hand side is easily controlled by \({\mathbb {D}}^2_{data}(u_f,v_0)\).
Turning to (137) we note that from commuting the transport equation for  we can derive
we can derive

Renormalising with the (commuted) Bianchi equation (38) we deduce

where the second equality follows from inserting the Bianchi equation (35). Restricting now to the solution in the gauge  , we can integrate the right hand side in v along \(C_{u_f}\) using Cauchy–Schwarz and the fluxes already controlled (recall also that
, we can integrate the right hand side in v along \(C_{u_f}\) using Cauchy–Schwarz and the fluxes already controlled (recall also that  along \(C_{u_f}\)) to obtain (137) but with the term
along \(C_{u_f}\)) to obtain (137) but with the term  on the right-hand side. From Lemma 2.3 we have the relation
on the right-hand side. From Lemma 2.3 we have the relation

whose right-hand side is easily controlled by \({\mathbb {D}}^2_{data}(u_f,v_0)\). \(\quad \square \)
Corollary 3.21
We have the following flux bound along \(C_{u_f}\):

Remark 3.22
Note that (140) controls all derivatives up to order two by elliptic estimates and the fact that  is supported on \(\ell \ge 2\).
is supported on \(\ell \ge 2\).
Proof
The estimate follows from the bound (137) on the spheres \(S^2_{u_f,v}\) and the fact that the flux of  can be controlled by (108), (104) and (119) after plugging these estimates into the identity
can be controlled by (108), (104) and (119) after plugging these estimates into the identity

\(\square \)
3.5.9 Step 8: closing the twice T-commuted \(\Gamma \)-estimate
We finally prove (111). To do this we finally apply the first conservation law with two \(\mathcal {L}_T\)-commutations:

By the gauge change formula on \(C_{u_f}\) in Proposition 2.10 and (83) from Proposition 3.12, we have

with the new flux given by

For the term \(\mathcal {G}^{2,0}_{\Gamma }\) appearing in (142) we can apply the estimate (92). For the ingoing cone \(\underline{C}_{v_f}\) we have from (97) the limiting expression

Note the cancellation that is going to appear on the sphere \(S^2_{u_f,\infty }\) when taking the limit \(v_f\rightarrow \infty \) of (141) and inserting the above expressions.
We next evaluate the non-coercive cross-terms in (143). From Proposition 2.12 we have, using the properties of the  gauge (see Proposition 3.1), the following identities along \(C_{u_f}\):
gauge (see Proposition 3.1), the following identities along \(C_{u_f}\):

We therefore have (all integrals being along \(C_{u_f}\) and all quantities with respect to the solution  )
)

where the last inequality follows from Corollary 3.21, Propositions 3.15, 3.17, 3.18, 3.19, 3.20, and the estimate in equation (104).
We finally conclude from (141) after taking the limit \(v_f\rightarrow \infty \) and inserting previous estimates

where we have inserted the definition (65) in the last step. This is (111).
3.6 Proof of Theorem 3.7
In this section we prove (70) and (71). Note that it suffices to prove (70) and (71) without the zeroth order term as the latter is controlled directly from the angular term by an elliptic estimate.
Before we begin, we first use the fluxes already controlled through (68) to prove another flux estimate:
Proposition 3.23
We have the following estimate for  along \(C_{u_f}\):
along \(C_{u_f}\):

Proof
Solving (55) for  and applying
and applying  with (56) from Proposition 2.12 yields
with (56) from Proposition 2.12 yields

Since
 ,
,  along \(C_{u_f}\) by Proposition 3.1, we have from (146) in
along \(C_{u_f}\) by Proposition 3.1, we have from (146) in  -gauge along \(C_{u_f}\)
-gauge along \(C_{u_f}\)

Integrating with respect to the measure \(\Omega ^2 r^2 dv \varepsilon _{S^2}\), the result follows from (68) and Proposition 3.20. \(\quad \square \)
In the following, all quantities are with respect to the solution  . Recall also that
. Recall also that  .
.
We first prove (71). To control the  -part of the flux, we write (39) using (38) as
-part of the flux, we write (39) using (38) as

whence

Integrating this along the cone \(C_{u_f}\) with respect to the measure \(r^2 \Omega ^2 dv\varepsilon _{S^2}\) gives the desired control after using Proposition 3.23 and (68). For  -part of the flux, we write (40) as
-part of the flux, we write (40) as

Therefore,

Integrating this along the cone \(C_{u_f}\) with respect to the measure \(r^2dv\varepsilon _{S^2}\) we obtain the desired control after using Proposition 3.19 and (120).
We now prove (70). For the angular part of the flux on the left, we write (32) and (33) as

Therefore, we can estimate

Integrating over the cone \(C_{u_f}\) with respect to the measure \(r^2 dv \varepsilon _{S^2}\) the result follows from estimating the terms on the right hand side by (68) and using the elliptic divergence identity  . In particular, we also control A itself.
. In particular, we also control A itself.
We gain control of  using the Bianchi equation (31),
using the Bianchi equation (31),

This lets us estimate  using that
using that  . So,
. So,


We now have control on  since we control the right hand side of (150) via (104) and (114). Additionally, to control
since we control the right hand side of (150) via (104) and (114). Additionally, to control  we now need to estimate
we now need to estimate  and use (151). To estimate the
and use (151). To estimate the  -term we use (21) and
-term we use (21) and 

We apply  to deduce an estimate for
to deduce an estimate for  . This yields
. This yields

It is now manifest that integrating over the cone \(C_{u_f}\) with respect to the measure \( dv \varepsilon _{S^2}\), one can control all terms on the right hand side by (68), except the terms  and
and  .
.
To deal with the term  , we combine (21) and (23) to write
, we combine (21) and (23) to write

It follows that

After integrating with respect to the measure \( dv \varepsilon _{S^2}\) over \(C_{u_f}\) one controls all terms on the right through (71), (120) and Proposition 3.15 respectively.
For the term  we recall (54) to estimate
we recall (54) to estimate

After integrating with respect to the measure \( dv \varepsilon _{S^2}\) over \(C_{u_f}\) one controls all terms on the right through (68), Proposition 3.19, Proposition 3.15 and Corollary 3.21. This completes the proof of (70).
4 Controlling the Teukolsky Fluxes Along Ingoing Cones
In this final section we obtain bounds analogous to the ones appearing in Theorem 3.7 but on the ingoing cones. A natural approach would be to repeat the arguments of Sect. 3 now changing the gauge on the ingoing cone to satisfy  . However, this argument does not seem to close as the change of gauge now produces a term of the wrong sign as opposed to the good term on null infinity (the first term in (52)) generated in the outgoing argument. We remedy this by obtaining the ingoing flux through a standard energy estimate for the Teukolsky equation itself. The main idea is that the spacetime term produced by the first order term in the Teukolsky equation (which a priori could lead to exponential growth) can grow at most linearly in time by the estimate we already proved on the outgoing flux.
. However, this argument does not seem to close as the change of gauge now produces a term of the wrong sign as opposed to the good term on null infinity (the first term in (52)) generated in the outgoing argument. We remedy this by obtaining the ingoing flux through a standard energy estimate for the Teukolsky equation itself. The main idea is that the spacetime term produced by the first order term in the Teukolsky equation (which a priori could lead to exponential growth) can grow at most linearly in time by the estimate we already proved on the outgoing flux.
4.1 The Teukolsky equations for A and \(\underline{A}\)
We recall the form of the Teukolsky equations for the quantities  and
and  .Footnote 8
.Footnote 8


While the equations take a nice “symmetric" form when written in this way, we recall from the well-posedness theory (see (44)) that it is A and \(\underline{A} \Omega ^{-4}\) which extend regularly to the horizon. For \(\hat{\underline{\textrm{A}}}=\Omega ^{-4}\underline{A}\) we have the equation

4.2 Energies and fluxes
We define for \(v \ge v_0\) the fluxes

Note that these fluxes are the non-degenerate (near the horizon) energy fluxes naturally associated with the Teukolsky operator when contracted with a globally timelike vectorfield which asymptotically becomes \(\partial _t\).
4.3 The main result
We obtain the following estimates along arbitrary ingoing cones:
Corollary 4.1
Under the assumptions of Theorem 3.7 we have in addition the bounds
where \(D:= \sup _{u_f \in [u_0,\infty )} {\mathbb {E}}^2_{data} (u_f)\) with \({\mathbb {E}}^2_{data} (u_f)\) the quantity appearing on the right hand side of (70).
We will prove the estimate (159) in Sect. 4.4 and the estimate (160) in Sect. 4.5.
We let N be the redshift vectorfield from [16]. In particular, for parameters \(\sigma >0\), \(2M<r_0<7/4M\), we let \(N= \chi (r) \left( 1+2\,M \sigma \Omega ^2\right) \Omega ^{-1} e_3 + \left( 1+2\,M \sigma \Omega ^2 \chi (r)\right) T\) where \(\chi \) is a radial monotonically decreasing cut-off function equal to 1 in \([2\,M, r_0]\) and equal to zero for \(r \ge R:=5/2\,M\). Note that N is uniformly timelike for \(r\ge 2M\) and that \(N= T\) for \(r \ge R\). In the following, C denotes a constant depending only on \(\sigma \) and \(r_0\), which may change from line to line.
4.4 Proof of the estimate on A
We start by applying the energy estimate associated to the N multiplier for the Teukolsky equation (155) in a region \(\mathcal {A}(v_1,v_2):=\left[ u_0, \infty \right) \times [v_1,v_2] \times {\mathbb {S}}^2\) for arbitrary \(v_0 \le v_1 \le v_2 < \infty \).

The region \(\mathcal {A}=\mathcal {A}_1 \cup \mathcal {A}_2 \cup \mathcal {A}_3\) on the exterior of Schwarzchild which we apply the energy estimate for the globally timelike vector field N
Fixing \(\sigma \) and \(r_0\), we obtainFootnote 9

Here the first term in the integrand on the right comes from the first order term in the Teukolsky equation while the second term comes from the fact that the vectorfield N is not Killing for \(r \le R\). In particular, \(\textbf{1}_{r \le R}\) is the indicator function and  denotes the sum of all regular derivatives squared. The first two terms on the right come from controlling the fluxes on \(v=v_1\) and \(u=u_0\) respectively (using Theorem 3.7 for the latter). The term on the left comes from the positive future flux on \(v=v_2\) (the good term appearing on the horizon we simply drop).
denotes the sum of all regular derivatives squared. The first two terms on the right come from controlling the fluxes on \(v=v_1\) and \(u=u_0\) respectively (using Theorem 3.7 for the latter). The term on the left comes from the positive future flux on \(v=v_2\) (the good term appearing on the horizon we simply drop).
Denoting \(D= \sup _{u_f} {\mathbb {E}}^2_{data} (u_f)\), we claim that the estimate of Theorem 3.7 implies the estimate

To verify (162) we split the domain of integration \(\mathcal {A}(v_1,v_2)=\mathcal {A}= \mathcal {A}_1 \cup \mathcal {A}_2 \cup \mathcal {A}_3\) where \(\mathcal {A}_1 = \mathcal {A} \cap \{ u \ge v_2 - R^\star \}\), \(\mathcal {A}_2 = \mathcal {A} \cap \{ v_1 - R^\star \le u \le v_2 - R^\star \}\) and \(\mathcal {A}_3 = \mathcal {A} \cap \{ u \le v_1-R^\star \}\), so that the decomposition is disjoint up to a set of measure zero, as indicated in the figure above. For \(\mathcal {A}_1\) one then observes that

where we have used the monotonicty and angular independence of \(\Omega ^2\) in the first inequality and the fact that \(\Omega ^2 = -\partial _u r\) (and of course the uniform boundedness for the outgoing fluxes following from Theorem 3.7) in the last. For \(\mathcal {A}_2\) we note

where we have used \(\Omega ^2 \le 1\) and of course Theorem 3.7. Finally for \(\mathcal {A}_3\) we note

where we have used the monotonicity of \(\frac{1}{r^2}\) in the v direction, the boundedness of \(\partial _ur=-\Omega ^2\) in \(\mathcal {A}_3\) and Theorem 3.7.
Having established (162), it is easy to see that one can invoke the Cauchy–Schwarz inequality to deduce from (161) the following estimate, valid for any \(v_0 \le v_1 \le v_2 <\infty \),
A standard argument now gives
which is the desired (159).
4.5 Proof of the estimate on \(\underline{A}\)
The argument for \(\underline{A}\) is slightly more involved because the fluxes obtained in Theorem 3.7 do not have optimal \(\Omega ^2\) weights near the horizon and because the  -derivative is not part of the outgoing flux (and cannot possibly be as there is no Bianchi equation for this derivative). However, we can exploit the redshift effect in that the estimate of the vectorfield N will produce a spacetime term of the right sign and with the correct weights near the horizon. The details are as follows.
-derivative is not part of the outgoing flux (and cannot possibly be as there is no Bianchi equation for this derivative). However, we can exploit the redshift effect in that the estimate of the vectorfield N will produce a spacetime term of the right sign and with the correct weights near the horizon. The details are as follows.
We claim that there exists \(\sigma >0\) and \(r_0\) close to the horizon such that for all \(v_0 \le v_1 \le v_2 < \infty \) contracting (157) with
 produces the following estimate after integration over the region \(\mathcal {A}(v_1,v_2)\) (with \(d\mu = dudv d\theta d\phi \sin \theta \)):
produces the following estimate after integration over the region \(\mathcal {A}(v_1,v_2)\) (with \(d\mu = dudv d\theta d\phi \sin \theta \)):

where we recall \(D=\sup _{u_f} {\mathbb {E}}^2_{data} (u_f)\). The proof of the estimate (165) proceeds along the following lines. Upon contraction with  we have the following identity
we have the following identity

-
Upon integration in u, v, the first two terms of (166) produce two good future boundary terms (fluxes) since \(f,g>0\). The good term on the horizon we drop. The past fluxes are easily estimated by \({\mathbb {F}} [\underline{A}](v_1)\) for the ingoing and by D for the outgoing flux using Theorem 3.7.
-
One can check that the coefficient of
 -term in the last line is globally positive. Moreover, it controls a spacetime term of the type
-term in the last line is globally positive. Moreover, it controls a spacetime term of the type  .
. -
Picking \(r_0\) close enough to 2M allows one to establish that for \(r\le r_0\) (i.e. near the horizon), the terms in the third line of (166) produce three good spacetime terms. Moreover the
 -term scales with \(\sigma \), which we view as a largeness factor (in fact, the
-term scales with \(\sigma \), which we view as a largeness factor (in fact, the  -term also has a largeness factor of \(\sigma \)). For \(r\ge r_0\), the terms in the third line of (166) are put on the right-hand side of (161). Note that the angular and zeroth order term produce have no contribution to the bulk for \(r\ge R\) since f is compactly supported.
-term also has a largeness factor of \(\sigma \)). For \(r\ge r_0\), the terms in the third line of (166) are put on the right-hand side of (161). Note that the angular and zeroth order term produce have no contribution to the bulk for \(r\ge R\) since f is compactly supported. -
For \(r\le r_0\), the cross-term in the final line of (166) can be absorbed into the
 and
and  -term because of the largeness factor of \(\sigma \) (see previous step) and the favourable signs.
-term because of the largeness factor of \(\sigma \) (see previous step) and the favourable signs.For \(r\ge r_0\), we can apply Young’s inequality with \(\epsilon \) and absorb the resulting
 using the good global
using the good global  -term. The
-term. The  -term is put on the right. Note the r-weights here.
-term is put on the right. Note the r-weights here.
 -term in the last line is globally positive. Moreover, it controls a spacetime term of the type
-term in the last line is globally positive. Moreover, it controls a spacetime term of the type  .
. -term scales with
-term scales with  -term also has a largeness factor of
-term also has a largeness factor of  and
and  -term because of the largeness factor of
-term because of the largeness factor of  using the good global
using the good global  -term. The
-term. The  -term is put on the right. Note the r-weights here.
-term is put on the right. Note the r-weights here.The spacetime term on the right hand side (165) is now estimated by \(C D\left( v_2-v_1\right) + C D\) exactly as in the case of A in previous section using Theorem 3.7. This time we may split the region \(\mathcal {A}(v_1,v_2)\) into \(\mathcal {A}(v_1,v_2)=\mathcal {A}= \mathcal {A}^\prime _1 \cup \mathcal {A}^\prime _2 \cup \mathcal {A}^\prime _3\) where \(\mathcal {A}^\prime _1 = \mathcal {A} \cap \{ u \ge v_2 - r_0^\star \}\), \(\mathcal {A}^\prime _2 = \mathcal {A} \cap \{ v_1 - r_0^\star \le u \le v_2 - r_0^\star \}\) and \(\mathcal {A}^\prime _3 = \mathcal {A} \cap \{ u \le v_1-r_0^\star \}\), so that again the decomposition is disjoint up to a set of measure zero. The spacetime term on the right hand side (161) is still overestimated by integrating over the regions \(\mathcal {A}_2^\prime \cup \mathcal {A}_3^\prime \) and those are indeed exactly handled as in the previous section. We conclude
from which the desired (160) follows.
4.6 Uniform boundedness of \(\underline{A}\)
Recall that uniform boundedness of A was a direct consequence of Theorem 3.7, angular commutation and Sobolev embedding, see (6). For \(\underline{A}\), the estimate (160) similarly implies

first with the crossed factor of \(\frac{1}{r}\). The factor \(\frac{1}{r}\) can be removed as indicated if one also invokes the estimate (71) along the outgoing cones. After trivial angular commutation and Sobolev embedding on spheres one finally obtains an \(L^\infty \) bound for  . We leave the standard details to the reader.
. We leave the standard details to the reader.
Availability of data and materials
Not applicable.
Code availability
Not applicable.
Notes
On the other hand, the canonical energy has been used successfully to establish certain instability results in the asymptotically anti-de Sitter setting. See [19].
One uses here the fact that the Einstein constraint equations become ODEs on null hypersurfaces, which considerably simplifies the task to show coercivity of the fluxes. In addition, exploiting the decay towards null infinity of the linearised quantities (as following from local existence) and a cancellation of terms on the limiting sphere \(S^2_{u_f,\infty }\) is paramount. See [21].
While \( {\mathbb {E}}^2_{data} (u_f)\) is non-negative and uniformly bounded for smooth asymptotically flat data, it is not necessarily monotone in \(u_f\). This is because it involves both (non-manifestly coercive) fluxes along \(C_{u_0} \cup \underline{C}_{v_0}\) and bounds on the sphere \(S^2_{u_f,v_0}\).
The authors have so far been unable to prove an analogous “ingoing” version of Theorem 1.1 directly from the conservation laws. This may or may not suggest that the structure of null infinity is essential to the argument.
The quantity
 appearing in the above is the linearised Gaussian curvature of the double null spheres and given in terms of
appearing in the above is the linearised Gaussian curvature of the double null spheres and given in terms of  ,
,  by
by  where
where  . See [14].
. See [14].In particular, for every \(u \ge u_0\) fixed the limit of the quantity along the null cone \(C_{u}\) as \(v \rightarrow \infty \) is well-defined.
Of course they can also be derived directly from the equations of Sect. 2.2.
For the argument in this subsection any choice of \(\sigma , r_0\) will work since one does not have to exploit that the spacetime term produced by the N-multiplier estimate has a favourable sign in \(2\,M \le r \le r_0\) for a suitable choice of \(\sigma \) and \(r_0\).
 appearing in the above is the linearised Gaussian curvature of the double null spheres and given in terms of
appearing in the above is the linearised Gaussian curvature of the double null spheres and given in terms of  ,
,  by
by  where
where  . See [
. See [References
Andersson, L., Bäckdahl, T., Blue, P., Ma, S.: Stability for linearized gravity on the Kerr spacetime (2019). arXiv:1903.03859
Andersson, L., Häfner, D., Whiting, B.F.: Mode analysis for the linearized Einstein equations on the Kerr metric: the large \(\mathfrak{a}\) case (2022). arXiv:2207.12952
Andersson, L., Ma, S., Paganini, C., Whiting, B.F.: Mode stability on the real axis. J. Math. Phys. 58(7), 072501 (2017)
Benomio, G.: A new gauge for gravitational perturbations of Kerr spacetimes I: the linearised theory (2022). arXiv:2211.00602
Benomio, G.: A new gauge for gravitational perturbations of Kerr spacetimes II: the linear stability of Schwarzschild revisited (2022). arXiv:2211.00616
Chandrasekhar, S.: The Mathematical Theory of Black Holes. Oxford University Press, New York (1992)
Chandrasekhar, S.: On the equations governing the perturbations of the Schwarzschild black hole. Proc. R. Soc. Lond. A 343(1634), 289–298 (1975)
Chandrasekhar, S., Ferrari, V.: The flux integral for axisymmetric perturbations of static space-times. Proc. R. Soc. Lond. A 428(1875), 325–349 (1990)
Christodoulou, D.: The Formation of Black Holes in General Relativity. European Mathematical Society, Helsinki (2009)
Christodoulou, D., Klainerman, S.: The Global Nonlinear Stability of the Minkowski Space. Princeton University Press, Princeton (1993)
Collingbourne, S.C.: The Gregory–Laflamme instability and conservation laws for linearised gravity. Doctoral thesis, University of Cambridge (2022)
Collingbourne, S.C.: Coercivity properties of the canonical energy in double null gauge on the 4-dimensional Schwarzschild exterior. Class. Quantum Gravity 40(22), 225013 (2023)
Dafermos, M., Holzegel, G., Rodnianski, I.: Boundedness and decay for the Teukolsky equation on Kerr spacetimes I: the case \(|a|\le \le {M}\). Ann. PDE 5(1), 2 (2019)
Dafermos, M., Holzegel, G., Rodnianski, I.: The linear stability of the Schwarzschild solution to gravitational perturbations. Acta Math. 222(1), 1–214 (2019)
Dafermos, M., Holzegel, G., Rodnianski, I., Taylor, M.: The non-linear stability of the Schwarzschild family of black holes (2021). arXiv:2104.08222
Dafermos, M., Rodnianski, I.: Lectures on black holes and linear waves. Clay Math. Proc. 17, 97–206 (2008)
Friedman, J.L.: Generic instability of rotating relativistic stars. Commun. Math. Phys. 62(3), 247–278 (1978)
Giorgi, E.: Boundedness and decay for the Teukolsky system of spin \(\pm 2\) on Reissner-Nordström spacetime: the case \(Q\le \le M \). Ann. Henri Poincaré 21(8), 2485–2580 (2020)
Green, S.R., Hollands, S., Ishibashi, A., Wald, R.M.: Superradiant instabilities of asymptotically anti-de Sitter black holes. Class. Quantum Gravity 33(12), 125022 (2016)
Hollands, S., Wald, R.M.: Stability of black holes and black branes. Commun. Math. Phys. 321(3), 629 (2013)
Holzegel, G.: Conservation laws and flux bounds for gravitational perturbations of the Schwarzschild metric. Class. Quantum Gravity 33(20), 205004 (2016)
Klainerman, S., Szeftel, J.: Global Nonlinear Stability of Schwarzschild Spacetime Under Polarized Perturbations. Princeton University Press, Princeton (2020)
Klainerman, S., Szeftel, J.: Kerr stability for small angular momentum(2021). arXiv:2104.11857
Ma, S.: Uniform energy bound and Morawetz estimate for extreme components of spin fields in the exterior of a slowly rotating Kerr black hole II: linearized gravity. Commun. Math. Phys. 377(3), 2489–2551 (2020)
Masaood, H.: A scattering theory for linearised gravity on the exterior of the Schwarzschild black hole I: the Teukolsky equations. Commun. Math. Phys. 393(1), 477–581 (2022)
Masaood, H.: A scattering theory for linearised gravity on the exterior of the Schwarzschild black hole II: the full system (2022). arXiv:2211.07462
Millet, P.: Optimal decay for solutions of the Teukolsky equation on the Kerr metric for the full subextremal range \(|a| \le M\) (2023). arXiv:2302.06946
Shlapentokh-Rothman, Y.: Quantitative mode stability for the wave equation on the Kerr spacetime. Ann. Henri Poincaré 16(1), 289–345 (2015)
Shlapentokh-Rothman, Y., Teixeira da Costa, R.: Boundedness and decay for the Teukolsky equation on Kerr in the full subextremal range \(|a|\le M\): frequency space analysis (2020). arXiv:2007.07211
Shlapentokh-Rothman, Y., Teixeira da Costa, R.: Boundedness and decay for the Teukolsky equation on Kerr in the full subextremal range \(|a|\le M\): physical space analysis (2023). arXiv:2302.08916
Teixeira da Costa, R.: Mode stability for the Teukolsky equation on extremal and subextremal Kerr spacetimes. Commun. Math. Phys. 378(1), 705–781 (2020)
Teukolsky, S.A.: Perturbations of a rotating black hole. I. Fundamental equations for gravitational, electromagnetic, and neutrino-field perturbations. Astrophys. J. 185, 635–648 (1973)
Wald, R.M.: Construction of solutions of gravitational, electromagnetic, or other perturbation equations from solutions of decoupled equations. Phys. Rev. Lett. 41, 203–206 (1978)
Whiting, B.F.: Mode stability of the Kerr black hole. J. Math. Phys. 30(6), 1301–1305 (1989)
Xuan, P.T.: Conformal scattering theories for tensorial wave equations on Schwarzschild spacetime (2022). arXiv:2006.02888
Acknowledgements
G.H. acknowledges support by the Alexander von Humboldt Foundation in the framework of the Alexander von Humboldt Professorship endowed by the Federal Ministry of Education and Research, funding through European Research Council Consolidator Grant 772249 as well as Germany’s Excellence Strategy EXC 2044 390685587, Mathematics Münster: Dynamics-Geometry-Structure. The authors thank Gabriele Benomio for helpful comments on the manuscript.
Funding
Open Access funding enabled and organized by Projekt DEAL. G.H. acknowledges support by the Alexander von Humboldt Foundation in the framework of the Alexander von Humboldt Professorship endowed by the Federal Ministry of Education and Research, funding through European Research Council Consolidator Grant 772249 as well as Germany’s Excellence Strategy EXC 2044 390685587, Mathematics Münster: Dynamics-Geometry-Structure.
S.C.C. acknowledges support through the Joseph Fels Ritt Assistant Professorship at Columbia University in the City of New York.
Author information
Authors and Affiliations
Contributions
Not applicable.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Ethics approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Additional information
Communicated by P. Chrusciel.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Collingbourne, S.C., Holzegel, G. Uniform Boundedness for Solutions to the Teukolsky Equation on Schwarzschild from Conservation Laws of Linearised Gravity. Commun. Math. Phys. 405, 138 (2024). https://doi.org/10.1007/s00220-024-04999-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00220-024-04999-4