
Abstract
We consider a ferromagnetic nanowire and we focus on an asymptotic regime where the Dzyaloshinskii-Moriya interaction is taken into account. First we prove a dimension reduction result via \(\Gamma \)-convergence that determines a limit functional E defined for maps \(m:\mathbb {R}\rightarrow \mathbb {S}^2\) in the direction \(e_1\) of the nanowire. The energy functional E is invariant under translations in \(e_1\) and rotations about the axis \(e_1\). We fully classify the critical points of finite energy E when a transition between \(-e_1\) and \(e_1\) is imposed; these transition layers are called (static) domain walls. The evolution of a domain wall by the Landau–Lifshitz–Gilbert equation associated to E under the effect of an applied magnetic field \(h(t)e_1\) depending on the time variable t gives rise to the so-called precessing domain wall. Our main result proves the asymptotic stability of precessing domain walls for small h in \(L^\infty ([0, +\infty ))\) and small \(H^1(\mathbb {R})\) perturbations of the static domain wall, up to a gauge which is intrinsic to invariances of the functional E.
Similar content being viewed by others


Data Availability
There is no data associated to this manuscript.
Notes
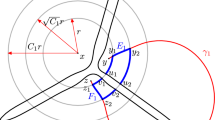
This is unambiguous because \(w^\pm _*\) does not touch \(\pm e_1\) for any \(x \in \mathbb {R}\). In the canonical basis \((e_1, e_2, e_3)\), (1.7) can be rewritten as
$$\begin{aligned} w^\pm _*=\tanh \bigg (\sqrt{1-\gamma ^2}x\bigg ) e_1\pm \frac{1}{\cosh (\sqrt{1-\gamma ^2}x)}\bigg (\cos (\gamma x)e_2-\sin (\gamma x) e_3\bigg ). \end{aligned}$$The precessing domain wall represents the time-dependent translation of the static wall \(w^\pm _*\) whose centre \(y_*\) evolves by (1.9) that is combined with a time-dependent precession about the nanowire axis \(e_1\) encoded in the rotation of angle \(\phi _*\) in the plane \((e_2, e_3)\) evolving by (1.9). Thus, this evolution is fundamentally different than the more common travelling waves (e.g., the Walker wall [28]).
One idea in treating the DMI at the stationary level is to consider the rotated magnetization \(M=R_{\varphi _*} m\) with \(\varphi _*\) given in (1.7) yielding an energy density for M without DMI, see Step 2 in the proof of Theorem 1.1. One could also use this rotated magnetisation at the dynamical level, however our method based on modulation is rather indifferent on DMI, and the computations do not get more technical due to DMI.
One can consider that \(E_\eta \) is extended by \(+\infty \) in the set \(\mathscr {H}^1(\Sigma )\setminus \mathscr {M}_\eta \), as well as \(E_0\) is extended by \(+\infty \) in the set \(\mathscr {H}^1(\Sigma )\setminus \mathscr {M}_0\).
Such an in-plane transition M is called Bloch wall of \(180^\circ \). A different type of Bloch wall is studied in [18].
Observe that in the energy dissipation identity (4.1), all the terms are rightfully integrable because \(m(t)\in \mathscr {H}^s\) with \(s\geqslant 2\), so \(E(m(t))<\infty \), \(m(t) \wedge e_1 \in L^2\) and \(\delta E(m(t)) \in L^2\) for all \(t<T_+\).
We underline that the Cauchy theory for the Laudau-Lifshitz-Gilbert equation is not completely satisfactory: the equation is \(\dot{H}^{1/2}\) critical for its Schrödinger parts, so one could expect a result for such regularity. Theorem 4.1 is not meant to be optimal as \(m_0 \in \mathscr {H}^s\) with \(s \geqslant 1\), but it is enough for our purposes. Much sharper results exist in the slightly different (and harder) context of Schrödinger maps in critical spaces, see [2, 3] (even though they are a priori estimates on smooth solutions).
By Lemma 3.2, \(\partial _x w_*\) and \(e_1 \wedge w_*\) are \(L^2\) linearly independent. However, they are not orthogonal in \(L^2\).
The \(W^{2,\infty }(\mathbb {R})\) regularity of coefficients \(\beta \) is needed in Claim 4.9 below, in order to perform two integrations by parts and bound them in \(L^\infty \).
Since for \(k\in \{0,1\}\), \(O^\ell _k(f)=O^\ell _2(f)\), these estimates hold also for \(O^\ell _0(f)\) and \(O^\ell _1(f)\) for every \(\ell \geqslant 1\).
One can prove that \(\mathscr {H}^s(\mathbb {R}, \mathbb {S}^2)\subset \dot{H}^1(\mathbb {R}, \mathbb {S}^2)\) for every \(s\geqslant 1\), but for our purposes, in the following, we restrict to the case \(s\in [1,2]\).
One can choose \(\delta = O(c^2)\) and \(C = O(1/c)\) as \(c\rightarrow 0\).
Tracking the constants in the proof shows that one can choose \(\delta = \delta (c)\) given by Proposition B.3 and \(C= O(1+ \Vert m \Vert _{\mathscr {H}^1}/c)\).
By (1.7), we have \(|(w_*)_1|+|\partial _x (w_*)_1|\geqslant \cos ^2 \theta _*+\sqrt{1-\gamma ^2} \sin ^2 \theta _*\geqslant \sqrt{1-\gamma ^2}>0\) in \(\mathbb {R}\).
Recall that \( \Vert u_1\Vert _{L^2}>0\).
References
Alouges, F., Soyeur, A.: On global weak solutions for Landau–Lifshitz equations. Nonlinear Anal. Theory Methods Appl. 18, 1071–1084 (1992)
Bejenaru, I., Ionescu, A.D., Kenig, C.E.: Global existence and uniqueness of Schrödinger maps in dimensions \(d\ge 4\). Adv. Math. 215(1), 263–291 (2007)
Bejenaru, I., Ionescu, A.D., Kenig, C.E., Tataru, D.: Global Schrödinger maps in dimensions \(d\ge 2\): small data in the critical Sobolev spaces. Ann. Math. (2) 173(3), 1443–1506 (2011)
Carbou, G.: Stability of static walls for a three-dimensional model of ferromagnetic material. J. Math. Pures Appl. (9) 93(2), 183–203 (2010)
Carbou, G.: Metastability of wall configurations in ferromagnetic nanowires. SIAM J. Math. Anal. 46(1), 45–95 (2014)
Carbou, G., Labbé, S.: Stability for static walls in ferromagnetic nanowires. Discrete Contin. Dyn. Syst. Ser. B 6(2), 273–290 (2006)
Carbou, G., Labbé, S.: Stabilization of walls for nano-wires of finite length. ESAIM Control Optim. Calc. Var. 18(1), 1–21 (2012)
Carbou, G., Labbé, S., Trélat, E.: Control of travelling walls in a ferromagnetic nanowire. Discrete Contin. Dyn. Syst. Ser. S 1(1), 51–59 (2008)
Chang, S.-M., Gustafson, S., Nakanishi, K., Tsai, T.-P.: Spectra of linearized operators for NLS solitary waves. SIAM J. Math. Anal. 39(4), 1070–1111 (2008)
Döring, L., Ignat, R., Otto, F.: A reduced model for domain walls in soft ferromagnetic films at the cross-over from symmetric to asymmetric wall types. J. Eur. Math. Soc. (JEMS) 16(7), 1377–1422 (2014)
Gou, Y., Goussev, A., Robbins, J.M., Slastikov, V.: Stability of precessing domain walls in ferromagnetic nanowires. Phys. Rev. B 84, 104445 (2011)
Goussev, A., Robbins, J.M., Slastikov, V.: Domain-wall motion in ferromagnetic nanowires driven by arbitrary time-dependent fields: an exact result. Phys. Rev. Lett. 104, 147202 (2010)
Goussev, A., Robbins, J.M., Slastikov, V., Tretiakov, O.A.: Dzyaloshinskii–Moriya domain walls in magnetic nanotubes. Phys. Rev. B 93, 054418 (2016)
Gutiérrez, S., de Laire, A.: The Cauchy problem for the Landau–Lifshitz–Gilbert equation in BMO and self-similar solutions. Nonlinearity 32(7), 2522–2563 (2019)
Hislop, P.D., Sigal, I.M.: Introduction to Spectral Theory: With Applications to Schrödinger Operators. Applied Mathematical Sciences 113, 1st edn. Springer-Verlag, New York (1996)
Ignat, R.: A \(\Gamma \)-convergence result for Néel walls in micromagnetics. Calc. Var. Partial Differ. Equ. 36(2), 285–316 (2009)
Ignat, R.: Uniqueness result for a weighted pendulum equation modeling domain walls in notched ferromagnetic nanowires, C. R. Math. Acad. Sci. Paris 360, 819–828 (2022)
Ignat, R., Merlet, B.: Lower bound for the energy of Bloch walls in micromagnetics. Arch. Ration. Mech. Anal. 199(2), 369–406 (2011)
Ignat, R., Moser, R.: Interaction energy of domain walls in a nonlocal Ginzburg–Landau type model from micromagnetics. Arch. Ration. Mech. Anal. 221(1), 419–485 (2016)
Ignat, R., Moser, R.: Néel walls with prescribed winding number and how a nonlocal term can change the energy landscape. J. Differ. Equ. 263(9), 5846–5901 (2017)
Ignat, R., Moser, R.: Energy minimisers of prescribed winding number in an \({\mathbb{S} }^1\)-valued nonlocal Allen-Cahn type model. Adv. Math. 357, 106819, 45, (2019)
Jizzini, R.: Optimal stability criterion for a wall in a ferromagnetic wire in a magnetic field. J. Differ. Equ. 250(8), 3349–3361 (2011)
Komineas, S., Melcher, C., Venakides, S.: Traveling domain walls in chiral ferromagnets. Nonlinearity 32(7), 2392–2412 (2019)
Kühn, K.: Reversal modes in magnetic nanowires. Ph.D. Thesis, Max-Planck-Institut für Mathematik, Germany, (2007)
Kühn, K.: Moving domain walls in magnetic nanowires. Annl. l’I.H.P. Anal. Non linéaire 26(4), 1345–1360 (2009)
Lakshmanan, N., Nakamura, K.: Landau–Lifshitz equation of ferromagnetism: exact treatment of the gilbert damping. Phys. Rev. Lett. 53(26), 2497–2499 (1984)
Martel, Y., Merle, F.: Asymptotic stability of solitons for subcritical generalized KdV equations. Arch. Ration. Mech. Anal. 157(3), 219–254 (2001)
Schryer, N.L., Walker, L.R.: The motion of 180\(^\circ \) domain walls in uniform dc magnetic fields. J. Appl. Phys. 45(12), 5406–5421 (1974)
Slastikov, V.V., Sonnenberg, C.: Reduced models for ferromagnetic nanowires. IMA J. Appl. Math. 77(2), 220–235 (2012)
Takasao, K.: Stability of travelling wave solutions for the Landau–Lifshitz equation. Hiroshima Math. J. 41(3), 367–388 (2011)
Tsutsumi, M.: On the cauchy problem for the noncompact Landau–Lifshitz–Gilbert equation. J. Math. Anal. Appl. 344(1), 157–174 (2008)
Weinstein, M.I.: Modulational stability of ground states of nonlinear Schrödinger equations. SIAM J. Math. Anal. 16(3), 472–491 (1985)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors are not aware of any conflict of interest regarding this manuscript.
Additional information
Communicated by K. Nakanishi.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The authors acknowledge partial support by the ANR projects MAToS ANR-14-CE25-0009-01 and MOSICOF ANR-21-CE40-0004.
Appendices
Appendix A: Toolbox
We compute for \(a,b,c\in \mathbb {R}^3\), \(g= (y,\phi ) \in G\), \(m, {\tilde{m}}:\mathbb {R}\rightarrow \mathbb {S}^2\), \(m=(m_1, m_2, m_3)\):
Appendix B: Some Properties of the Sets \(\mathscr {H}^1\) and \(H^1(\mathbb {R}, \mathbb {S}^2)\)
We recall that for \(m = (m_1,m_2,m_3) \in \mathbb {R}^3\), we denote \(m' = (m_2,m_3) \in \mathbb {R}^2\) the last two coordinates.
For \(s \geqslant 1\), we defined for every \(m:\mathbb {R}\rightarrow \mathbb {R}^3\),
where \(\dot{H}^s\) was defined in (1.11). We start by proving the following interpolation inequalityFootnote 13\(\mathscr {H}^s(\mathbb {R}, \mathbb {S}^2)\subset \dot{H}^1(\mathbb {R}, \mathbb {S}^2)\) for \(s\in [1,2]\). We also prove the behaviour at \(\pm \infty \) of maps in \(\mathscr {H}^s(\mathbb {R}, \mathbb {S}^2)\).
Lemma B.1
Let \(s \in [1,2]\). There exists \(C>0\) such that for any \(m: \mathbb {R} \rightarrow \mathbb {S}^2\) with \(\Vert m \Vert _{\mathscr {H}^s} <+\infty \), then \(\partial _x m \in L^2\) and
in particular, \(E(m)<\infty \), and m admits limits belonging to \(\{ (\pm 1,0,0) \}\) as \(x \rightarrow \pm \infty \).
Proof
We divide the proof in two steps:
Step 1: \(s=1\). In this case, the desired inequality follows by the definition of \(\mathscr {H}^1\). Note that
We infer that \(E(m)\leqslant C \Vert m \Vert ^2_{\mathscr {H}^1}\).
Step 2: \(s \in (1,2]\). First observe that \(m_2 \in H^s=L^2\cap \dot{H}^s\) and by interpolation, we have
and similarly \(m_3 \in H^s\) and \(\Vert \partial _x m_3 \Vert _{L^2} \lesssim \Vert m \Vert _{\mathscr {H}^s}\). In particular, \(|m_2|, |m_3| \in H^1\); as m takes its values in \(\mathbb {S}^2\), this means that \(\sqrt{1-m_1^2} = |(m_2,m_3)| \in H^1\) and
In particular, the functions \(m_2, m_3, |m_1|\) are continuous and have the following limits
We now consider
which is an open bounded set. First, we estimate the length |A| of A:
Next, we estimate the \(L^2\) norm of \(\partial _x m_1\). On the set \(A^c = \mathbb {R}\setminus A\), one has
Therefore, by (B.2),
It remains to estimate the \(L^2\) norm of \(\partial _x m_1\) on A. As A is open and bounded, we write
where \(\{I_k\}_{k\in \mathscr {K}}\) is a (at most) countable family of disjoint open bounded intervals. We have

where  denotes the average on the bounded interval \(I_k\).
denotes the average on the bounded interval \(I_k\).
Estimating \(J_2\). Let \(\mathscr {J} = \big \{ k \in \mathscr {K}\, : \, m_1(a_k^-) \ne m_1(a_k^+) \big \}\). Then \(|m_1(a_k^-) - m_1(a_k^+)|=1\) if \(k \in \mathscr {J}\) and \(m_1(a_k^-) - m_1(a_k^+) =0\) if \(k \notin \mathscr {J}\). Thus,

To estimate the length \(|I_k|\) of \(I_k\) for \(k\in \mathscr {J}\), as \(m_1(a_k^-)\) and \(m_1(a_k^+)\) have different sign, the continuity of \(m_1\) implies the existence of \(b_k \in (a_k^-, a_k^+)\) such that \(m_1(b_k) =0\). Denoting by \(f = \sqrt{1-m_1^2} \in H^1\) (by (B.2)), the Cauchy-Schwarz inequality implies
Arguing similarly on \([b_k,a_k^+]\), we get after squaring, for \(c = 7/2 - 2\sqrt{3} >0\):
Therefore, by (B.2),
Estimating \(J_1\). We consider separately the cases \(s \in (1,2)\) and \(s=2\).
Case 1. Assume that \(s \in (1,2)\). We have by Jensen’s inequality:

where we used (B.3). As \(2+4(s-1) \leqslant 6\), this completes the case when \(s <2\).
Case 2. Assume that \(s=2\). As before, we have by Jensen’s inequality

where we used (B.3). The bound (B.1) follows.
Finally, \(m_1\) is continuous (as \(\partial _x m_1 \in L^2\)) and we saw that \(|m_1| \rightarrow 1\) as \(x \rightarrow +\infty \). As \(\{ \pm 1 \}\) is discrete, we infer that \(m_1 \rightarrow a^+\) as \(x \rightarrow +\infty \) with \(a^+ \in \{ \pm 1 \}\). The same argument shows that \(m_1 \rightarrow a^-\) as \(x \rightarrow -\infty \) with \(a^- \in \{ \pm 1 \}\). \(\quad \square \)
In the next lemma, we prove the reverse inequality with respect to Lemma B.1 relating E(m) and \(\Vert m\Vert _{\mathscr {H}^1}\). In other words, the seminorm \(\Vert \cdot \Vert _{\mathscr {H}^1}\) fully characterises the set of finite energy configurations \(E(m)<\infty \).
Lemma B.2
If \(\gamma ^2<1\) then there exists a constant \(C_\gamma >0\) such that
Proof
Let \(m=(m_1, m_2, m_3):\mathbb {R}\rightarrow \mathbb {S}^2\) and \(m'=(m_2, m_3)\). As \(|\gamma |<1\), we can choose \(a,b\in (-1,1)\) such that \(ab=\gamma \). Then
Therefore,
(If one chooses \(a^2=b^2=|\gamma |\), then \(C_\gamma \) can be taken equal to \(\frac{1-|\gamma |}{2}\)). \(\quad \square \)
In the following, we study more closely the norms \(\Vert \cdot \Vert _{\mathscr {H}^1}\) and \(\Vert \cdot \Vert _{H^1}\) for maps with target \(\mathbb {S}^2\). First, note that Lemma B.2 implies that two maps \(m, {\tilde{m}}\in \mathscr {H}^1(\mathbb {R}, \mathbb {S}^2)\) may have different limits at \(\pm \infty \), so \(m-{\tilde{m}}\) might not belong to \(L^2\) (e.g., \({\tilde{m}}=-m\)). However, if m and \({\tilde{m}}\) have the same limits at \(\pm \infty \), then we show that \(m-{\tilde{m}}\in L^2\). Next we prove an important stability property for non-constant maps: if m and \({\tilde{m}}\) are close to each other in \(\mathscr {H}^1\) and they are not constant, then they have the same limits at \(\pm \infty \) and \(m-{\tilde{m}}\) is small in \(L^2\).
Proposition B.3
-
1)
Let \(m, {\tilde{m}}\in \mathscr {H}^1(\mathbb {R}, \mathbb {S}^2)\) with the same limits at infinity, i.e., \(m(\pm \infty ) = {\tilde{m}}(\pm \infty )\). Then \(m-{\tilde{m}} \in H^1\).
-
2)
Let \(m\in \mathscr {H}^1(\mathbb {R}, \mathbb {S}^2)\) such that \(m_1\) is not a constant function. Then for all \(\varepsilon >0\), there exists \(\delta = \delta (m)>0\) such that if \({\tilde{m}}\in \mathscr {H}^1(\mathbb {R}, \mathbb {S}^2)\) satisfies \(\Vert m - {\tilde{m}} \Vert _{\mathscr {H}^1} \leqslant \delta \), then
$$\begin{aligned} \Vert m - {\tilde{m}} \Vert _{H^1} \leqslant \varepsilon ; \end{aligned}$$(B.4)in particular, \(m(\pm \infty ) = {\tilde{m}}(\pm \infty )\).
Remark B.4
The case of a constant component \(m_1\) is different. For example, observe that if \(m=e_1\), then \({\tilde{m}}=-e_1\) has the property that \(\Vert m-{\tilde{m}}\Vert _{\mathscr {H}^1}=0\), but \(m-{\tilde{m}}\notin L^2\).
Proof
We divide the proof in several steps:
Step 1. We prove 1). Consider \(u = m - {\tilde{m}}\). Since \(m, {\tilde{m}}\in \mathscr {H}^1(\mathbb {R}, \mathbb {S}^2)\), then \(\Vert u \Vert _{\mathscr {H}^1} < +\infty \), so that \(u_2,u_3 \in H^1\) and \(\partial _x u_1 \in L^2\). It remains to prove that \(u_1\in L^2\). As \(m(\pm \infty ) = {\tilde{m}}(\pm \infty )\), we deduce that \(u_1=m_1-{\tilde{m}}_1\) (which is continuous) tends to 0 at \(\pm \infty \). By Lemma B.1, we have \((m_2,m_3), ({\tilde{m}}_2, {\tilde{m}}_3)\rightarrow 0\) as \(x\rightarrow \pm \infty \); combined with \(m(\pm \infty ) = {\tilde{m}}(\pm \infty )\), we deduce \(\lim _{x\rightarrow \pm \infty } |m_1 + {\tilde{m}}_1|=2|m(\pm \infty )|=2\). Thus, there exists \(R>0\) such that
We estimate the \(L^2\) norm of \(u_1\) in the set \(\big \{|x| \geqslant R\big \}\) and then in the set \(\big \{|x| \leqslant R\big \}\). (B.5) implies
yielding
because \(m, {\tilde{m}}\) are \(\mathbb {S}^2\)-valued maps and \((m_2,m_3), ({\tilde{m}}_2, {\tilde{m}}_3)\in L^2\). The estimate of the \(L^2\) norm of \(u_1\) in the set \(\{|x| \leqslant R \}\) is easy: as \(|u_1| \leqslant |m_1| + |{\tilde{m}}_1| \leqslant 2\), it follows
Hence \(u_1 \in L^2(\mathbb {R})\).
Step 2. We prove 2). First in the following claim, we prove smallness of the \(L^\infty \) norm of \(u = m - {\tilde{m}}\) provided that \(\Vert m - {\tilde{m}} \Vert _{\mathscr {H}^1}\) is small.
Claim B.5
Let \(m\in \mathscr {H}^1(\mathbb {R}, \mathbb {S}^2)\) with \(m_1\) non-constant and let \(u^n\) be a sequence such that \(m + u^n: \mathbb {R} \rightarrow \mathbb {S}^2\) and \(\Vert u^n \Vert _{\mathscr {H}^1} \rightarrow 0\) as \(n\rightarrow \infty \). Then \(\Vert u^n \Vert _{L^\infty } \rightarrow 0\) as \(n\rightarrow \infty \).
Proof of Claim
The assumption \(\Vert u^n \Vert _{\mathscr {H}^1} \rightarrow 0\) as \(n\rightarrow \infty \) implies \(\Vert u^n_2 \Vert _{H^1}, \Vert u^n_3 \Vert _{H^1} \rightarrow 0\); thus, the embedding \(H^1\hookrightarrow L^\infty \) yields \(u^n_2\), \(u^n_3 \rightarrow 0\) in \(L^\infty \) as \(n\rightarrow \infty \). It remains to show that \(u_1^n \rightarrow 0\) in \(L^\infty \). For this, observe that the constraints \(m, m + u^n \in \mathbb {S}^2\) yield
Combined with \(u^n_2,u^n_3 \rightarrow 0\) in \(L^\infty \) as \(n\rightarrow \infty \), since \(|m|=1\) in \(\mathbb {R}\), we deduce
Recall that \(\Vert u^n_1 \Vert _{L^\infty }\leqslant \Vert u^n \Vert _{L^\infty } \leqslant 2\). Up to a subsequence, we can assume that \(u^n_1(0)\rightarrow c\) for some limit \(c\in [-2,2]\).
Step 1. We claim that \(c=0\) and for any \(R >0\), \(u_1^n\rightarrow 0\) in \(L^\infty ([-R,R])\). Indeed, it suffices to consider large R, and as \(m_1\) is not constant in \(\mathbb {R}\), we can assume that \(m_1\) is not constant in \([-R,R]\). For such R and any \(x \in [-R,R]\),
As \(\partial _x u^n_1 \rightarrow 0\) in \(L^2\), we deduce that \(u_1^n\rightarrow c\) in \(L^\infty ([-R,R])\). Passing to the limit in (B.6), it yields \(2 m_1 c + c^2 =0\) in \([-R,R]\). If \(c\ne 0\), then we would obtain \(m_1 = -c/2\) is constant in \([-R,R]\) which contradicts our assumption. Thus, \(c=0\), i.e., \(u_1^n\rightarrow 0\) in \(L^\infty ([-R,R])\) as \(n\rightarrow \infty \).
Step 2. Convergence on all \(\mathbb {R}\) of \(u^n_1 \rightarrow 0\) in \(L^\infty \).
Assume for the sake of contradiction that there is \(\delta \in (0, \frac{1}{2})\), a sequence of points \(x_n \in \mathbb {R}\) and a subsequence still denoted \(u^n\) for simplicity of notations, such that \(|u^n_1(x_n)| \geqslant \delta \) for every n.
Up to choosing a further subsequence, we can also assume \(x_n\rightarrow x_\infty \) with \(x_\infty \in [-\infty , \infty ]\). First observe that \(x_\infty \in \{\pm \infty \}\). Indeed, if \(x_\infty \in \mathbb {R}\), then choosing \(R>0\) sufficiently large, we would have that \(x_\infty \in (-R,R)\) and \(u_1^n\rightarrow 0\) in \(L^\infty ([-R,R])\) which contradicts the fact that \(|u^n_1(x_n)| \geqslant \delta >0\) and \(x_n\rightarrow x_\infty \in (-R,R)\). Therefore, \(x_0=\pm \infty \): we will assume \(x_0=+\infty \) (the other case follows similarly).
By Lemma B.2, we know that \(m_1\) has limits belonging to \(\{\pm 1\}\) as \(x\rightarrow \pm \infty \); fix a large R, such that \(|m_1|\geqslant \frac{1}{2}\) outside \((-R,R)\). As \(x_n \rightarrow +\infty \) and \(u_1^n\rightarrow 0\) in \(L^\infty ([-R,R])\), there exists \(N>0\) such that for every \(n\geqslant N\), \(x_n \geqslant 2R\) and \(|u^n_1|\leqslant \frac{\delta }{2}\) in \([-R,R]\). As \(|u^n_1(x_n)| \geqslant \delta \) and \(x_n\geqslant 2R\), by continuity of \(u^n_1\), there exists \(y_n> R\) such that \(|u^n_1(y_n)|=\delta \) for every \(n\geqslant N\). Using \(|m_1(y_n)|\geqslant \frac{1}{2}\) (because \(y_n\notin [-R,R]\)), we deduce that for \(n\geqslant N\):
This contradicts (B.6).
This argument shows that every subsequence of \(u^n_1\) has a further subsequence converging to the unique limit 0 in \(L^\infty \); as \(L^\infty \) is a Hausdorff space, we conclude that \(u^n_1 \rightarrow 0\) in \(L^\infty \). \(\quad \square \)
End of proof of point 2). We now prove smallness of the \(H^1\) norm of u as stated in (B.4). By Lemma B.2, there exists \(R \geqslant 1\) such that \(|m_1| \geqslant 1/2\) for every \(|x| \geqslant R\). Let \(\varepsilon \in (0,1)\). The above claim implies the existence of \(\delta =\delta (m) >0\) such that if \(m+u: \mathbb {R} \rightarrow \mathbb {S}^2\) and \(\Vert u \Vert _{\mathscr {H}^1} \leqslant \delta \), then \(\Vert u \Vert _{L^\infty } \leqslant \frac{\varepsilon }{2\sqrt{R}}<\frac{1}{2}\). As \(m+u\) and m are \(\mathbb {S}^2\)-valued maps, we have
Squaring the above equality, as \(|m_1| \geqslant 1/2\) outside \((-R,R)\) and \(|u_1|\leqslant |u| \leqslant \frac{1}{2}\), we get
and so \(u_1^2 \leqslant 4 v^2\) outside \((-R,R)\). We now integrate on \(|x| \geqslant R\); as \(|m|=1\) and \(|u|^2\leqslant |u|\leqslant \frac{1}{2}\) in \(\mathbb {R}\) yielding \(|v|\leqslant 3(|u_2|+|u_3|)\) in \(\mathbb {R}\), we obtain for some universal constant \(C>1\):
Combined with
we get
Up to lowering \(\delta >0\) further, we can also assume that \(C \delta ^2 \leqslant \varepsilon ^2/2\), and so \(\Vert u \Vert _{H^1} \leqslant \varepsilon \).
\(\square \)
As mentioned in Remark B.4, the case of a constant first coordinate should be considered separately, and for this, we have to take into account the following (mirror) symmetry in the first component
The following result holds for continuous maps m not necessarily belonging to \(\mathscr {H}^1\).
Lemma B.6
Let \(m=(m_1, m_2, m_3): \mathbb {R} \rightarrow \mathbb {S}^2\) be a continuous map with \(m_1=c\) constant in \(\mathbb {R}\).
-
(1)
If \(c\ne 0\), then there exist \(\delta ,C>0\) (depending onFootnote 14c) such that if \({\tilde{m}}: \mathbb {R} \rightarrow \mathbb {S}^2\) satisfies \(\Vert m - {\tilde{m}} \Vert _{\mathscr {H}^1} \leqslant \delta \), then
$$\begin{aligned} \min ( \Vert m - {\tilde{m}} \Vert _{H^1}, \Vert m^c - {\tilde{m}} \Vert _{H^1}) \leqslant C \Vert m - {\tilde{m}} \Vert _{\mathscr {H}^1}. \end{aligned}$$ -
(2)
If \(c=0\), then there exists a universal \(C>0\) such that for every \({\tilde{m}}: \mathbb {R} \rightarrow \mathbb {S}^2\),
$$\begin{aligned} \Vert m - {\tilde{m}} \Vert _{H^1} \leqslant C(\Vert m - {\tilde{m}} \Vert _{\mathscr {H}^1}+\Vert (m - {\tilde{m}})' \Vert ^{1/2}_{L^1}), \end{aligned}$$where we recall the notation \((m - {\tilde{m}})'=(m_2 - {\tilde{m}}_2, m_3 - {\tilde{m}}_3)\).
Proof
Denote \(u:= {\tilde{m}}-m\). As in the proof of Proposition B.3, since m and \({\tilde{m}}\) are \(\mathbb {S}^2\)-valued, we get
so that
Case 1. \(c=0\). In this case, \(|(m_2,m_3)|=1\) (note that \(m\notin \mathscr {H}^1\)) and \(|u_1| = \sqrt{v}\); then there is a constant \(C>0\) (independent of m) such that
which leads to conclusion 2).
Case 2. \(c\ne 0\). As \(|m|=1\) and \(|u|^2\leqslant 2|u|\leqslant 4\) in \(\mathbb {R}\), we obtain that
for some universal constant \(M>0\) (not depending on m). Also, as \(\partial _x v=2c\partial _x u_1+ 2u_1 \partial _x u_1\) and \(|u_1|\leqslant 2\), we deduce that \(\Vert v \Vert _{\dot{H}^1}\lesssim \Vert u \Vert _{\mathscr {H}^1}\). By the Sobolev embedding \(H^1\hookrightarrow L^\infty \), up to possibly increase the above constant M, it follows
Choosing \(\delta \leqslant c^2/(2M)\), if \(\Vert u \Vert _{\mathscr {H}^1} \leqslant \delta \), then the above estimate yields \(\Vert v \Vert _{L^\infty } \leqslant c^2/2\), and in particular, \(v+c^2\geqslant c^2/2>0\) in \(\mathbb {R}\). As \(u_1\) is a continuous function belonging to \( \bigg \{ - c \pm \sqrt{c^2 + v} \bigg \}\), then there exists a sign \(\sigma \in \{ \pm 1 \}\) such that
Note that
Subcase i). \(\sigma = {{\,\mathrm{\text {sgn}}\,}}(c)\). In this case, \( |u_1| \leqslant \left| \frac{v}{c}\right| \) in \(\mathbb {R}\) and we get by (B.8):
and so
Subcase ii). \(\sigma = -{{\,\mathrm{\text {sgn}}\,}}(c)\). In this case,
and similarly, we conclude
\(\square \)
We go back to magnetisations m with non constant first component. Actually, the smallness (B.4) in Proposition B.3 can be quantified to a linear bound under an additional nondegeneracy assumption on m
Lemma B.7
Let \(m\in \mathscr {H}^1(\mathbb {R}, \mathbb {S}^2)\) be such that \(m_1\) is non-constant and satisfies the nondegeneracy condition for some \(c>0\):
Then there exist \(\delta ,C>0\) (depending on mFootnote 15) such that if \({\tilde{m}}: \mathbb {R} \rightarrow \mathbb {S}^2\) satisfies \(\Vert m - {\tilde{m}} \Vert _{\mathscr {H}^1} \leqslant \delta \), then
We emphasise that the nondegeneracy assumption is verified for \(w_*\)Footnote 16, and this is our purpose in Theorem 1.4.
Proof
Denote \(u = {\tilde{m}} - m\) as before. If \(u_1=0\), then we are done. Otherwise, we may assume that \(\Vert u_1\Vert _{L^2}>0\). In the following, \(M>0\) is a universal constant that can change from line to line. We fix \(\varepsilon >0\) that is given later (it will be defined below on (B.9)). By Proposition B.3, there exists \(\delta \in (0,1)\) so that \(\Vert u\Vert _{\mathscr {H}^1}\leqslant \delta \) implies \(\Vert u \Vert _{H^1} \leqslant \varepsilon \). By the constraint \(|m|=|{\tilde{m}}|=1\), it follows
yielding
Using the Gagliardo-Nirenberg inequality \(\Vert f\Vert _{L^4}\lesssim \Vert \partial _x f\Vert ^{1/4}_{L^2} \Vert f\Vert ^{3/4}_{L^2}\) and the Hölder inequality \(\Vert m_ju_j\Vert _{L^2}\leqslant \Vert u_j\Vert _{L^4}\Vert m_j\Vert _{L^4}\) for \( j=2, 3\), we deduce that
(We used \(\Vert u\Vert ^2_{\mathscr {H}^1}\leqslant \Vert u\Vert _{\mathscr {H}^1}\leqslant \delta <1\) and the Sobolev embedding \(\Vert u_1\Vert _{L^\infty } \leqslant \Vert u \Vert _{H^1} \leqslant \varepsilon \)). Combined with the non-degeneracy condition and using again the Gagliardo-Nirenberg and Hölder inequality, we obtain
We choose
Taking \(s> 0\) givenFootnote 17 by \(s^2= \Vert u_1\Vert _{L^2}(\leqslant \Vert u_1\Vert _{H^1}\leqslant \varepsilon <\infty )\) and denoting \(a:=M(\Vert m\Vert _{\mathscr {H}^1}+1)>0\), after dividing by \(s^2\), we obtain
The discriminant of the above quadratic form in s is positive of order \(O(\Vert u\Vert _{\mathscr {H}^1} (\Vert m \Vert _{\mathscr {H}^1}^2 + c^2))\), so both roots are real numbers of order \(\Vert u\Vert ^{1/2}_{\mathscr {H}^1}\), and in particular \(s=\Vert u_1\Vert ^{1/2}_{L^2}\) is of order \(\Vert u\Vert ^{1/2}_{\mathscr {H}^1}\) which yields the conclusion. \(\quad \square \)
Remark B.8
If \({\tilde{m}}\) and m are not close in \(\mathscr {H}^1\), then one can not expect any bound of the form
for any function \(F: \mathbb {R}_+ \rightarrow \mathbb {R}_+\) which takes finite values. To see this, let us give an example of a family of magnetisations m, \({\tilde{m}}\), such that \(\Vert m -{\tilde{m}} \Vert _{\mathscr {H}^1}\) remains bounded, but \(\Vert m - {\tilde{m}} \Vert _{H^1}\) is unbounded. For this, let \(\theta \) be a smooth function in \(\mathbb {R}\) such that \(\theta (x) = 0\) for \(x < -1\), \(\theta (x) = \pi \) for \(x > 1\) and \(\theta \) is increasing on \([-1,1]\). Consider \({\tilde{m}} = (1,0,0)\) constant and m such that \(m_1\) has two transitions from \(-1\) to 1 (given by \(\cos \theta \)) separated at a distance of order \(R>2\): for example, we can choose such \(m_1\) to be
Let \(m_2 = \sqrt{1-m_1^2} \in H^1\) and \(m_3 =0\). Then \(m \in \mathscr {H}^1\) and one sees that \(\Vert m - {\tilde{m}} \Vert _{\mathscr {H}^1}\) is constant for large R, but of course \(\Vert m - {\tilde{m}} \Vert _{L^2}=O(\sqrt{R}) \rightarrow +\infty \) as \(R \rightarrow +\infty \).
Appendix C: Coercivity of a Schrödinger Operator
Lemma C.1
Let \(L = - \Delta +V\) where \(V \in L^\infty (\mathbb {R}^N)\) has the property that there exist \(R>0\) and \(c >0\) such that \(V(x) \geqslant c\) for every \(|x| \geqslant R\). Assume that there exists \(\phi \in H^1(\mathbb {R}^N)\) such that\(L \phi = 0\) in the sense of distributions and \(\phi >0\) in \(\mathbb {R}^N\). Then \(\ker L=\mathbb {R}\phi \) and there exists \(\lambda >0\) (small) such that for every \(v \in H^1(\mathbb {R}^N)\), \(0\leqslant (Lv,v)_{H^{-1}, H^1} \leqslant \frac{1}{\lambda }\Vert v\Vert ^2_{H^1}\),
and for every \(v \in H^2(\mathbb {R}^N)\),
Proof
Note that if \(\phi \in H^1(\mathbb {R}^N)\) is a solution of \(L\phi =0\), as \(V\in L^\infty (\mathbb {R}^N)\), then \(\phi \in H^2(\mathbb {R}^N)\). Moreover, standard elliptic regularity implies that \(\phi \in W^{2,p}_{loc}(\mathbb {R}^N)\) for every \(p<\infty \), in particular, \(\phi \in C^1(\mathbb {R}^N)\). Therefore, the condition \(\phi >0\) in \(\mathbb {R}^N\) makes sense pointwise in \(\mathbb {R}^N\). Also, we will assume without loss of generality that \(\Vert \phi \Vert _{L^2}=1\).
Step 1. For every \(v\in C^\infty _c(\mathbb {R}^N)\), set \(w:=\frac{v}{\phi }\in C_c^1(\mathbb {R}^N)\) with compact support. Integrating by parts, we obtain:
because \(L\phi =0\) and \(\Delta (\phi ^2)=2\phi \Delta \phi +2|\nabla \phi |^2\in H^{-1}\) on any open bounded set. By density, for every \(v\in H^1(\mathbb {R}^N)\), there exists a sequence \(v_n\in C^\infty _c(\mathbb {R}^N)\) such that \(v_n\rightarrow v\) and \(\nabla v_n\rightarrow \nabla v\) in \(L^2\) and a.e. in \(\mathbb {R}^N\). In particular, \(\nabla \big (\frac{v_n}{\phi } \big )\rightarrow \nabla \big (\frac{v}{\phi } \big )\) a.e. in \(\mathbb {R}^N\). Since \(V\in L^\infty (\mathbb {R}^N)\), it follows by Fatou’s lemma:
As a consequence, if \(v\in H^1\) belongs to \(\ker L\), since \(\phi >0\) in \(\mathbb {R}^N\), then \(v\in \mathbb {R}\phi \). Also, as \(V\in L^\infty \), we conclude that \(0\leqslant (Lv,v) \leqslant \max \big (1, \Vert V\Vert _{L^\infty }\big )\Vert v\Vert ^2_{H^1}\) for every \(v\in H^1\).
Step 2. Let
By Step 1, we know that \(a\geqslant 0\). The aim is to prove that \(a > 0\). For that, we consider a minimising sequence \((v_n)_n\) in \(H^1\). As for \(v \in H^1\),
we can furthermore assume that \(v_n \geqslant 0\) for all n. As for some \(C>0\), \(V \geqslant -C\) in \(\mathbb {R}^N\), we infer that for any \(v \in H^1\),
so that \((v_n)_n\) is bounded in \(H^1\). Up to extracting a subsequence, we can assume that for some \({\underline{v}} \in H^1\), \(v_n \rightharpoonup {\underline{v}}\) in \(H^1\), \(v_n \rightarrow {\underline{v}}\) in \(L^2\) locally on compact sets and a.e. in \(\mathbb {R}^N\) and \((Lv_n, v_n)\rightarrow a\) as \(n\rightarrow \infty \). In particular, \({\underline{v}} \geqslant 0\). Now as \((v_n,\phi )_{L^2} =0\), since \(v_n \rightharpoonup {\underline{v}}\) in \(L^2\) and \(\phi \in L^2\), we deduce \(({\underline{v}},\phi )_{L^2}=0\), and as \(\phi >0\) and \({\underline{v}}\geqslant 0\), we conclude \({\underline{v}}=0\) a.e. in \(\mathbb {R}^N\).
Now we argue by contradiction and assume that \(a=0\), that is \((Lv_n,v_n) \rightarrow 0\). As \(V+(C+c) {\mathbb {1}_{|x| \leqslant R}} \geqslant c\), we get from strong \(L^2\) convergence in B(0, R) of \(v_n\) to \({\underline{v}}\), we see that
This implies that \(\Vert v_n \Vert _{H^1} \rightarrow 0\), and the convergence \(v_n \rightarrow {\underline{v}} =0\) is strong in \(H^1\). But \(\Vert v_n \Vert _{L^2} =1\), so this strong convergence also implies \(\Vert {\underline{v}} \Vert _{L^2} =1\), a contradiction. Hence \(a >0\).
Step 3. We now prove inequality (C.1). By Step 2 and homogeneity, we get that if \(v \in H^1\) and \((v,\phi )_{L^2}=0\), then
Then, still assuming that \((v,\phi )=0\), since \(V \geqslant -C\) in \(\mathbb {R}^N\), there holds for \(b:=\frac{a}{a+C+1}\in (0,1)\):
because \(a(1-b) + b V \geqslant a(1-b) -b C = b\).
Let \(v \in H^1\) (no longer assuming the orthogonality condition). We define the \(L^2\) orthogonal decomposition \(w:=v- (v, \phi )_{L^2} \phi \), so that \((w,\phi )_{L^2} =0\). As \(L\phi =0\) and L is self-adjoint, we compute using (C.3):
where we used \((x-y)^2 \geqslant \frac{1}{2} x^2 - y^2\). The desired inequality follows for \(\lambda := \min \big (\frac{1}{b\Vert \phi \Vert ^2_{H^1}}, \frac{b}{8}\big )\).
Step 4. We finally prove estimate (C.2), with a similar strategy as (C.1). By Step 2, we know that for every \(v\in H^2(\mathbb {R}^N)\) with \((v, \phi )_{L^2}=0\),
yielding \(\Vert Lv\Vert _{L^2}\geqslant a \Vert v\Vert _{L^2}\) with \(a>0\).
Let \({\tilde{b}} = \frac{a}{1+2a+2\Vert V \Vert _{L^\infty }} >0\), then, as in Step 3, we compute for \(v\in H^2(\mathbb {R}^N)\) such that \((v, \phi )_{L^2}=0\):
because \((a (1-2{\tilde{b}}) -2\Vert V \Vert _{L^\infty } {\tilde{b}}) = {\tilde{b}}\). As \(\Vert \Delta v \Vert _{L^2} + \Vert v \Vert _{L^2}\) controls the \(\Vert v \Vert _{H^2}\) norm, we can conclude that for some \(b'>0\),
For general \(v \in H^2\) (without assuming that \((v, \phi )_{L^2}=0\)), we set \(w:=v- (v, \phi ) \phi \). Then \(w\in H^2\) (as \(\phi \in H^2\)) with \((w, \phi )_{L^2}=0\) and since \(Lv=Lw\), the desired inequality (C.2) follows as in Step 3. \(\quad \square \)
Appendix D: BV Curves to \(\mathbb {S}^2\)
We claimed in the sketch of proof of Theorem 4.1 that any \(\mathbb {S}^2\) valued map in \(H^1([-A,A])\) can not have an image which is dense in any cap. Performing a change a chart, it suffices prove that a map in \(H^1([0,1], [0,1]^2)\) does not have a dense image (in \([0,1]^2\)). We actually provide a short quantitative proof in the slightly more general setting of BV maps.
Lemma D.1
Let \(m \in BV([0,1],[0,1]^2)\). Then m([0, 1]) is not dense in \([0,1]^2\).
More precisely, there exists a square Q of length \(\frac{1}{5(\Vert m \Vert _{BV}+1)}\) such that \(Q \cap m([0,1]) = \varnothing \).
Proof
Let \(n \geqslant 2\) be an integer to be fixed later, and consider a partition of \([0,1[^2\) into \(n^2\) squares \((Q_j)_{1 \leqslant j \leqslant n^2}\) of length 1/n, of the form \([\alpha /n, (\alpha +1) /n[ \times [\beta /n, (\beta +1) /n[\) for \(0 \leqslant \alpha , \beta \leqslant n-1\).
For all \(1 \leqslant j \leqslant n^2\), denote \(Q_j'\) the smaller square of length 1/(3n) which has the same center as \(Q_j\): if \(Q_j = [\alpha /n, (\alpha +1) /n[ \times [\beta /n, (\beta +1) /n[\) then \(Q_j' = [(\alpha +1/3) /n, (\alpha +2/3) /n[ \times [(\beta +1/3) /n, (\beta +2/3) /n[\).
Assume that for all \(1 \leqslant j \leqslant n^2\), \(Q_j' \cap m([0,1]) \ne \varnothing \), and consider \(y_j \in [0,1]\) such that \(m(y_j) \in Q_j' \cap m([0,1])\), and \((x_j)_j\) is the reordering of the \((y_j)_j\) that is \(0 \leqslant x_1< x_2< \cdots < x_{n^2} \leqslant 1\).
By construction, for any \(1 \leqslant j <k \leqslant n^2\), the distance between \(Q_j'\) and \(Q_k'\) is at least 2/(3n) so that \(d(m(x_j), m(x_{j+1})) \geqslant 2/(3n)\). Therefore, by definition of the BV norm,
(Recall \(n \geqslant 2\)). As a consequence, \(\Vert m \Vert _{BV} \geqslant 1\), and for any integer \(n > (3 \Vert m \Vert _{BV}+ 1)/2\), there exists j such that the \(Q_j'\) such that \(Q_j' \cap m([0,1]) = \varnothing \). The conclusion follows by choosing the integer \(n_0\) in the interval \(((3 \Vert m \Vert _{BV}+ 1)/2, 3 (\Vert m \Vert _{BV}+ 1)/2]\) (notice that \(n_0 \geqslant 3\)). Then \(Q_j'\) has length
\(\square \)
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Côte, R., Ignat, R. Asymptotic Stability of Precessing Domain Walls for the Landau–Lifshitz–Gilbert Equation in a Nanowire with Dzyaloshinskii–Moriya Interaction. Commun. Math. Phys. 401, 2901–2957 (2023). https://doi.org/10.1007/s00220-023-04714-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00220-023-04714-9