
Abstract
We investigate the convergence of the Crouzeix-Raviart finite element method for variational problems with non-autonomous integrands that exhibit non-standard growth conditions. While conforming schemes fail due to the Lavrentiev gap phenomenon, we prove that the solution of the Crouzeix-Raviart scheme converges to a global minimiser. Numerical experiments illustrate the performance of the scheme and give additional analytical insights.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Many models in mechanics, optimal control, and other areas can be formulated in terms of variational problems seeking the minimiser of

Our focus in the present work is on the numerical discretisation of (\({\mathcal {P}}\)) in the case of non-autonomous integrands \(\phi :\Omega \times {\mathbb {R}}^{m\times n} \rightarrow {\mathbb {R}}\), \(m,n \in {\mathbb {N}}\), that are Carathèodory, convex in the second component, and satisfy the non-standard growth conditions with \(1< p_-< p_+ < \infty \) and
We will assume throughout this paper that \(\Omega \subset {\mathbb {R}}^n\) is a bounded polygonal domain (to allow for discretisation), \(W :=\lbrace v \in W^{1,p_-}(\Omega ;{\mathbb {R}}^m) :v|_{\partial \Omega } = \psi |_{\partial \Omega }\rbrace \) with boundary data \(\psi \in W^{1,p_+}(\Omega ;{\mathbb {R}}^m)\), and right-hand side \(f\in L^{p_-'}(\Omega ;{\mathbb {R}}^m)\). Under these natural restrictions, Tonelli’s theorem states well-posedness of (\({\mathcal {P}}\)). In the context of nonlinear elasticity such problems were studied in [1, 2].
A naive approach to discretise (\({\mathcal {P}}\)) is the minimisation of the energy \({\mathcal {F}}\) over some discrete subspace \(W_h \subset W\). However, non-standard growth conditions \(p_-< p_+\) may lead to the Lavrentiev gap phenomenon [33, 40, 41], that is, it may occur with \(H :=W \cap W^{1,\infty }(\Omega ;{\mathbb {R}}^m)\) that
Since conforming discretisations generally satisfy \(W_h \subset H\), the strict inequality in (2) implies the failure of this scheme. Indeed, the approximated energy \(\min _{W_h} {\mathcal {F}}\) converges to the so-called H-minimum \(\inf _{H} {\mathcal {F}}\) as the underlying triangulation is refined [14].
Several numerical schemes have been suggested to overcome the Lavrentiev gap, see for example [6, 7, 14, 25, 31, 32]. These methods require a regularisation/penalisation leading to convergence only in a dual limit. The careful balancing of the regularisation parameter with refinement of the underlying triangulation is a challenging task that can be avoided, in some important situations, by the use of non-conforming finite element methods where \(W_h \not \subset W\) [34, 35]. This non-conforming approach leads to a numerical scheme that converges to the W-minimum \(\min _W {\mathcal {F}}\) for autonomous and convex integrands \(\phi (x,\xi )=\phi (\xi )\).
In the present work we show how to adapt the numerical scheme as well as the convergence analysis for the much larger class of variational problems (\({\mathcal {P}}\)) with non-autonomous integrands. The main result in Theorem 1 states the convergence of the approximated minimiser and energy to a W-minimiser \(u\in \text {argmin}_W {\mathcal {F}}\) and the W-minimum \(\min _{W} {\mathcal {F}}\), provided a specialised numerical quadrature rule is employed and under mild additional restrictions on the integrand (cf. (A1)–(A3) or (B) on p. 4). These assumptions are valid for a wide class of variational problems that exhibit a Lavrentiev gap, including important models such as the double-phase potential [5, 10, 13, 21, 24, 42], the variable exponent Laplacian [27, 41, 42], and the weighted p-energy [28]. The problems cited above do not exhaust the full range of present research in numerical analysis for problems with non-standard growth (for example, a posteriori estimates for variational problems with nonstandard power functionals [36]).
1.1 Outline
Section 2.1 introduces the numerical scheme that utilises Crouzeix-Raviart functions and a one-point quadrature rule. Section 2.2 provides two sets (A) and (B) of assumptions. The set (A) contains, compared to the set (B), a weaker assumption on the quadrature and stronger assumptions on the integrand. The convergence proof of the numerical scheme follows in Sect. 2.3. The proof is quite direct under the assumption in (B). The relaxed assumption on the quadrature in (A) requires a more involved analysis, which is performed in Sect. 2.4. This proof exploits ideas of Zhikov [39], in particular it relies on the dual variational problem and the concept of relaxation (18) allowing us to pass to more regular problems. We summarise examples for energies that lead to a Lavrentiev gap in Sect. 3. Numerical experiments, displayed in Sect. 4, apply our numerical scheme to these energies. In addition, the numerical experiments underline the importance of a suitable quadrature and further investigate singularities and the Lavrentiev gap for energies with multiple saddle points. We summarise required known results and calculations in the appendix.
2 Convergent numerical scheme
This section introduces the numerical scheme (Sect. 2.1) and proves its convergence (Sect. 2.3–2.4) under suitable assumptions on the integrand and quadrature (Sect. 2.2).
2.1 Discretisation
Let \(({\mathcal {T}}_h)_{h>0}\) be a (not necessarily shape-regular and nested) sequence of regular triangulations of the domain \(\Omega \) into simplices with diameters \(\text {diam}(T) < h\) for all \(T\in {\mathcal {T}}_h\). Let \({\mathcal {E}}_h\) denote the set of facets (\((d-1)\)-subsimplices) of all cells \(T\in {\mathcal {T}}_h\). The Crouzeix–Raviart space reads
Recall the boundary data \(\psi \in W^{1,p_+}(\Omega ;{\mathbb {R}}^m)\) from the definition of the space W in (\({\mathcal {P}}\)) and let \({\mathcal {E}}_h(\partial \Omega )\) denote the set of all facets \(e\in {\mathcal {E}}_h\) on the boundary \(\partial \Omega \). We define the space
Notice that the Crouzeix-Raviart space is non-conforming in the sense that \(W^{\text {nc}}_h\not \subset W\). In particular, the gradient is only defined in the sense of distributions. However, it is possible to apply the gradient element-wise, that is, we set the broken gradient
Numerical schemes for problems with Lavrentiev gap appear to be very sensitive with respect to quadrature errors (cf. Sect. 4.3). We will carefully analyse conditions under which the following simple one-point quadrature rule yields a convergent scheme: Given points \(x_T \in T,\) \(T \in {\mathcal {T}}_h\), we approximate \(\phi \) by the mesh-dependent integrand
This integrand is piece-wise constant in the first component and defines for all \(v \in W + W^{\text {nc}}_h\) and \(h>0\) the functional
The resulting numerical scheme seeks a minimiser

The existence of a discrete solution follows from the growth condition (1) and the direct method in calculus of variations.
2.2 Main result
To state the convergence of the numerical scheme in (\({\mathcal {P}}_h^\text {nc}\)), we introduce two alternative sets of assumptions on the integrand and the quadrature points \(x_T \in T\in {\mathcal {T}}_h\).
-
(Quadrature) There exists a constant \(c \in (0,1]\) such that we have for all \(T \in {\mathcal {T}}_h\), \(\xi \in {\mathbb {R}}^{m \times n}\), and \(h>0\)

Moreover, we assume the point-wise convergence \(\phi _h(x,\xi ) \rightarrow \phi (x,\xi )\) as \(h\rightarrow 0\) for almost all \(x\in \Omega \) and all \(\xi \in {\mathbb {R}}^{m\times n}\).
-
(\(\Delta _2\)-condition) There exist constants \(C,C_0 \in {\mathbb {R}}_{\ge 0}\) such that we have for almost all \(x\in \Omega \) and all \(\xi \in {\mathbb {R}}^{m\times n}\)
$$\begin{aligned} \phi (x, 2\xi )&\le C\, \phi (x,\pm \xi ) +C_0. \end{aligned}$$(A2) -
(\(\nabla _2\)-condition) If the constant c in (A1) is smaller than 1, there are constants \(K,K_0 \in {\mathbb {R}}_{\ge 0}\) such that we have for almost all \(x\in \Omega \) and all \(\xi \in {\mathbb {R}}^{m\times n}\)
$$\begin{aligned} K\, \phi (x,2 \xi )&\le \phi (x, \pm K \xi )+K_0. \end{aligned}$$(A3)

Notice that the \(\nabla _2\)-condition is equivalent to the \(\Delta _2\)-condition for the convex conjugate \(\phi ^*\), see Proposition A3. The numerical experiment in Sect. 4.3 shows that an assumption on the quadrature is necessary. The assumption in (A1) seems to be rather general, but might be relaxed if one uses additional information of specific energies. The relaxed assumption in (A1) comes with the price of a more involved convergence analysis. In particular, we investigate the dual problem, which requires the additional assumptions in (A2) and (A3).
We can circumvent this instructive but involved analysis by the following more restrictive assumption on the quadrature.
-
There exists a constant \(c_\phi <\infty \) such that, for all \(h>0\) and \(\xi \in {\mathbb {R}}^{m\times n}\) with \(c_\phi <|\xi |\),
$$\begin{aligned} \phi _h(x,\xi ) \le \phi (x,\xi )\qquad \text {for almost all }x\in \Omega . \end{aligned}$$(B)Moreover, we suppose the point-wise convergence \(\phi _h(x,\xi ) \rightarrow \phi (x,\xi )\) as \(h\rightarrow 0\) for almost all \(x\in \Omega \) and all \(\xi \in {\mathbb {R}}^{m\times n}\).
The following main result of this paper states convergence of the numerical scheme under the assumptions in (A1)–(A3) or the assumption in (B). Its proof is postponed to the following two subsections.
Theorem 1
(Convergence) Suppose the integrand \(\phi \) satisfies the two-sided growth conditions (1) and (A1)–(A3) or (B). Then the energies converge to the minimal energy, that is, we have
Moreover, there exists a subsequence \((h_j)_{j\in {\mathbb {N}}}\) with \(h_j \rightarrow 0\) such that
If the minimiser \(u\in W\) is unique, the entire sequence converges. If the integrand is strictly convex, then the convergence is strong.
Remark 2
(Alternative schemes) It should be possible to extend the following arguments and therefore also our main result to numerical schemes that share certain similarities with the Crouzeix-Raviart FEM. In particular, the result should extend to the (lowest-order) unstabilized HHO scheme in [16] and to DG schemes with an averaged penalty term as in [29], provided the penalties are scaled properly, cf. [8].
2.3 Proof of convergence
The proof of Theorem 1 requires three preliminary results. The first one is an asymptotic lower bound for the computed energy. Its proof utilises the point-wise convergence in (A1) or (B), that is,
A further tool is the conjugate functional (see for example [22]), which involves the convex conjugate (with \(\phi _0 :=\phi \))
The growth condition (1) and properties of the convex conjugate in Lemma A1 yield for all \(h\ge 0\), all \(\xi \in {\mathbb {R}}^{m\times n}\), and almost all \(x\in \Omega \) the growth
Lemma 3
(Lower bound) Let \((\vartheta _h)_{h>0} \subset L^1(\Omega ;{\mathbb {R}}^{m\times n})\) be a weakly convergent sequence \(\vartheta _h\rightharpoonup \vartheta \) in \(L^1(\Omega ;{\mathbb {R}}^{m\times n})\) as \(h \rightarrow 0\). Then we have
Proof
Let \((\vartheta _h)_{h>0} \subset L^1(\Omega ;{\mathbb {R}}^{m\times n})\) be a weakly convergent sequence \(\vartheta _h\rightharpoonup \vartheta \) in \(L^1(\Omega ;{\mathbb {R}}^{m\times n})\) as \(h\rightarrow 0\). Young’s inequality yields for all \(z\in L^\infty (\Omega ;{\mathbb {R}}^{m\times n})\) and \(h\ge 0\) that
Lemma A5 states that the point-wise convergence (6) implies point-wise convergence of the conjugates, that is, we have
This point-wise convergence and the upper growth condition (8) for \(\phi _h^*\) allow for the application of Lebesgue’s theorem, which yields
Taking the limit in (9), using the weak convergence in \(L^1(\Omega ;{\mathbb {R}}^{m\times n})\), and applying the identity in (10) result in
The lemma follows from an application of the conjugate functional theorem [22, Chap. IX, Prop. 2.1], which says
\(\square \)
In order to apply the previous lemma, we have to show that the gradients \((\nabla _h u_h)_{h>0}\) of the discrete minimiser have a weakly convergent subsequence. This property follows from the following more general result.
Lemma 4
(Convergent subsequence) Let \(v_h\in W^{\text {nc}}_h\) be uniformly bounded in the sense that
Then there exists a sequence \((h_j)_{j\in {\mathbb {N}}}\) with \(h_j \searrow 0\) and a function \(v\in W\) with
Proof
Applying the result of [35, Thm. 4.3] implies the statement but with \(\nabla v_{h_j} \rightharpoonup \nabla v\) weakly in \(L^1(\Omega ;{\mathbb {R}}^{m \times n})\). The uniform \(L^{p-}(\Omega ;{\mathbb {R}}^{m \times n})\) bound on \(\nabla v_{h_j}\) immediately implies that in fact \(\nabla v_{h_j} \rightharpoonup \nabla v\) weakly in \(L^{p-}(\Omega ;{\mathbb {R}}^{m \times n})\) as stated. The strong convergence of \(v_{h_j}\) in \(L^{p-}(\Omega ;{\mathbb {R}}^{m})\) then follows by the compactness of the embedding of broken Sobolev spaces [8]. \(\square \)
The final auxiliary result is an asymptotic upper bound for the minimal energy \({\mathcal {F}}_h(u_h) = \min _{W^{\text {nc}}_h} {\mathcal {F}}_h\).
Lemma 5
(Upper bound) Suppose (A1)– (A3) or (B), then we have
Proof
Step 1 (Upper bound for \({\mathcal {F}}_h({\mathcal {I}}_hv)\)). Let \(v\in W\) be arbitrary and set its non-conforming interpolation \({\mathcal {I}}_hv \in W^{\text {nc}}_h\) by
An integration by parts reveals for all \(T\in {\mathcal {T}}_h\) that
Since \(\phi _h|_T\) with \(T\in {\mathcal {T}}_h\) is constant in the first component and convex in its second, Jensen’s inequality and (11) yield
This estimate and the inequality \(\Vert v - {\mathcal {I}}_hv \Vert _{L^{p_-}(T)} \le C_\text {apx}\, \text {diam}(T) \, \Vert \nabla v\Vert _{L^{p_-}(T)}\) with \(C_\text {apx} = 1 + 2/n\) for all \(T\in {\mathcal {T}}_h\) [34, Lem. 2] show
Step 2 (Proof with (B)). Suppose the assumption in (B) holds true with threshold \(c_\phi <\infty \). Then the sum in the upper bound (12) satisfies
The growth condition (1) results for almost all \(x\in T \cap \lbrace |\nabla u| \le c_\phi \rbrace \) with \(T\in {\mathcal {T}}_h\) in the upper bound
Hence, Lebesgue’s dominated convergence theorem shows
This concludes the proof under the assumption in (B).
Step 2’ (Proof with (A1)–(A3)). The inequality in (12) reads
Taking the limit \(h\rightarrow 0\) yields
Thus, the lemma follows from the claim
The proof of the claim in (13) is rather involved and, thus, postponed to the following Sect. 2.4. \(\square \)
After these three preliminary results we can prove this paper’s main result.
Proof of Theorem 1
Lemma 5 and the growth condition (1) lead for all sufficiently small \(h>0\) to the upper bound
In particular, we have for all sufficiently small \(h>0\) a uniform upper bound \( \Vert \nabla _h u_h\Vert _{L^{p_-}(\Omega )}\le C < \infty . \) Hence Lemma 4 yields the existence of a subsequence \((u_{h_j})_{j\in {\mathbb {N}}}\) and a function \(v\in W\) with
An application of Lemma 3 and 5 shows that
In particular, \(v = u\) minimises the functional \({\mathcal {F}}\) over the set \(W\). This shows (4) and (5). Since the arguments apply to any subsequence, the entire sequence \(({\mathcal {F}}_h(u_h))_{h>0}\) converges to \({\mathcal {F}}(u) = \min _{W}{\mathcal {F}} = \lim _{h\rightarrow 0}{\mathcal {F}}_h(u_h)\). This shows (3).
If, in addition, the minimiser \(u\in W\) is unique, the same argument proves the convergence of the entire sequence \(u_{h}\rightarrow u\text { strongly in }L^{p_-}(\Omega ;{\mathbb {R}}^m)\) and \(\nabla _hu_{h} \rightharpoonup \nabla u\text { weakly in }L^{p_-}(\Omega ;{\mathbb {R}}^{m\times n})\) as \(h\rightarrow 0\). If the integrand is strictly convex in the second component then the strong convergence follows from [38]. \(\square \)
2.4 Proof of lemma 5
We verify the claim in (13) under the assumptions in (A1)–(A3), which we assume throughout this subsection. Our proof relies on techniques from [39]. Among others, we exploit the dual formulation of the minimisation problem for all \(h\ge 0\)

In order to include boundary data and right-hand side, we shift the functional \({\mathcal {F}}_h\) as follows. The surjectivity of the divergence operator [9] yields the existence of a function \(F \in L^{p_-'}(\Omega ;{\mathbb {R}}^{m\times n})\) with \(\text {div}\, F = f\). We set \(\phi _0 :=\phi \) and define for all \(h\ge 0\) and \(\xi \in {\mathbb {R}}^{m\times n}\) the (shifted) integrand
Recall the boundary data \(\psi \in W^{1,p_+}(\Omega ;{\mathbb {R}}^m)\) and define the energy
An integration by parts (with outer unit normal vector \(\nu \)) shows for all \(v \in W_0^{1,p_-}(\Omega ;{\mathbb {R}}^m)\) with homogeneous Dirichlet boundary data the identity
In particular, we have for all \(h\ge 0\) the equivalence of (\({\mathcal {P}}_h\)) and the problem
The dual problem involves the convex conjugate \(\Phi _h^*\), which reads
Lemma 6
(Properties of \(\Phi ^*_h\)) Let \(h\ge 0\).
-
(1)
There exist positive constants \({\overline{c}}_1,{\overline{c}}_2<\infty \) and a function \({\overline{c}}_0\in L^1(\Omega )\) such that the integrand \(\Phi ^*_h\) satisfies for almost all \(x\in \Omega \) and all \(\xi \in {\mathbb {R}}^{m\times n}\) the two sided growth condition
$$\begin{aligned} -{\overline{c}}_0(x) +{\overline{c}}_2{|{\xi }|}^{p_+'}\le \Phi ^*_h(x,\xi )\le {\overline{c}}_1{|{\xi }|}^{p_-'} + {\overline{c}}_0(x). \end{aligned}$$(15) -
(2)
With an h-independent constant \(C< \infty \) it holds for almost all \(x\in \Omega \) and all \(\xi \in {\mathbb {R}}^{m\times n}\) that
$$\begin{aligned} \Phi ^*(x,\xi ) - 1 \le C\, \Phi ^*_h(x,\xi ). \end{aligned}$$(16) -
(3)
Let \((\tau _h)_{h>0}\subset L^1(\Omega ;{\mathbb {R}}^{m\times n})\) be a weakly convergent sequence \(\tau _h \rightharpoonup \tau \) in \(L^1(\Omega ;{\mathbb {R}}^{m\times n})\). Then we have
$$\begin{aligned} \int _{\Omega } \Phi ^*(x,\tau )\, \mathrm {d}x\le \liminf _{h\rightarrow 0} \int _\Omega \Phi ^*_h(x,\tau _h)\, \mathrm {d}x. \end{aligned}$$
Proof of 1
Let \(\xi \in {\mathbb {R}}^{m\times n}\) and \(h\ge 0\). The growth condition in (8) shows
This bound and the identity in (14) lead almost everywhere in \(\Omega \) to
The lower bound in (15) follows similarly.
Proof of 2. Let \(\xi \in {\mathbb {R}}^{m\times n}\). By the properties of the convex conjugate (see Lemma A1) and the assumption in (A1) we have
If \(c=1\), this yields \(\phi ^*(\cdot ,\xi ) \le C \phi _h^*(\cdot ,\xi ) + 1\) with constant \(C = 1\). If \(c<1\), we use the \(\nabla _2\)-condition (A3) (which yields the \(\Delta _2\)-condition for \(\phi ^*_h\), see Proposition A3) to conclude \(\phi ^*(\cdot ,\xi ) \le C \phi _h^*(\cdot ,\xi ) + 1\) with some constant \(C < \infty \). This and the identity in (14) yield (16).
Proof of 3. The proof repeats the steps from the proof of Lemma 3. \(\square \)
We continue with the definition of the dual problem by setting the spaces \(X :=L^{p_-}(\Omega ;{\mathbb {R}}^{m\times n})\) and \( V :=\lbrace \nabla v :v\in W_0^{1,p_-}(\Omega ;{\mathbb {R}}^m)\rbrace \subset X. \) The orthogonal complement of V reads
By [22, Chap. IX, Prop. 2.1] we have for all \(h\ge 0\) and \(\tau \in L^{p_-'}(\Omega ;{\mathbb {R}}^{m\times n})\)
This identity and an integration by parts lead to the dual functional
Lemma 7
(Equivalent problems) It holds for all \(h\ge 0\) that
Proof
The first identity follows from the classical convex optimisation theorem (see for example [22, Chap. III, Thm. 4.1]). The second identity results from the design of the (shifted) functional \(\hat{{\mathcal {F}}}_h\). \(\square \)
An advantage of the dual problem is that we can use the growth condition in (15) to apply Lebesgue’s theorem, as done in the following lemma. The lemma involves the dual functional
Lemma 8
(Point-wise convergence) We have
Proof
Let \(\tau \in L_{\text {div}}^{p_-'}(\Omega ;{\mathbb {R}}^{m\times n})\). Due to the growth condition in (15) and the convergence result in Lemma A5 (which can be applied due to the assumption in (A1)) we can apply Lebesgue’s dominated convergence theorem to conclude \(\int _\Omega \Phi ^*(x,\tau ) - \Phi ^*_h(x,\tau )\, \mathrm {d}x\rightarrow 0\) as \(h\rightarrow 0\). \(\square \)
A consequence of the point-wise convergence result is the following lemma.
Lemma 9
(Upper bound for \({\mathcal {G}}_h\)) We have
Proof
Point-wise convergence (Lemma 8) yields for all \(\tau \in L_{\text {div}}^{p_-'}(\Omega ;{\mathbb {R}}^{m\times n})\)
\(\square \)
The following relaxation leads to an equivalent characterisation of the dual problem. We set for all \(h\ge 0\) and \(\tau \in L_{\text {div}}^{p_+'}(\Omega ;{\mathbb {R}}^{m\times n})\) the relaxed energy
We denote by \(\text {dom}\) the effective domain of a functional, for example
Lemma 10
(Properties of the relaxed energy functional \(\overline{{\mathcal {G}}}_h\)) Let \(h\ge 0\).
-
(1)
It holds that
$$\begin{aligned} {\mathcal {G}}_h(\tau )&= \overline{{\mathcal {G}}}_h(\tau )&\text {for all }\tau \in L_{\text {div}}^{p_-'}(\Omega ;{\mathbb {R}}^{m\times n}),\\ {\mathcal {G}}_h(\chi )&\le \overline{{\mathcal {G}}}_h(\chi )&\text {for all }\chi \in L_{\text {div}}^{p_+'}(\Omega ;{\mathbb {R}}^{m\times n}). \end{aligned}$$ -
(2)
The minimum of \(\overline{{\mathcal {G}}}_h\) over \(L_{\text {div}}^{p_+'}(\Omega ;{\mathbb {R}}^{m\times n})\) is attained and we have
$$\begin{aligned} \min _{L_{\text {div}}^{p_+'}(\Omega ;{\mathbb {R}}^{m\times n})} \overline{{\mathcal {G}}}_h = \inf _{L_{\text {div}}^{p_-'}(\Omega ;{\mathbb {R}}^{m\times n})} {\mathcal {G}}_h. \end{aligned}$$ -
(3)
It holds that
$$\begin{aligned} \text {dom}\,\overline{{\mathcal {G}}}_h \subset \text {dom}\,\overline{{\mathcal {G}}}. \end{aligned}$$ -
(4)
For all \(\tau \in \text {dom}\,\overline{{\mathcal {G}}}_h\) we have
$$\begin{aligned} \overline{{\mathcal {G}}}_h(\tau ) = {\mathcal {G}}_h(\tau ). \end{aligned}$$ -
(5)
The relaxed functional \(\overline{{\mathcal {G}}}_h\) is convex and weakly lower semi-continuous, that is, for all weakly convergent sequences \(\tau _n \rightharpoonup \tau \) in \(L_{\text {div}}^{p_+'}(\Omega ;{\mathbb {R}}^{m\times n})\)
$$\begin{aligned} \overline{{\mathcal {G}}}_h(\tau ) \le \liminf _{n\rightarrow \infty } \overline{{\mathcal {G}}}_h(\tau _n). \end{aligned}$$
Proof of 1
Lemma 6(3) and the fact that strong convergence implies weak convergence show the inequality
Equality follows for \(\tau \in L_{\text {div}}^{p_-'}(\Omega ;{\mathbb {R}}^{m\times n})\) by setting the constant sequence \(\tau _k :=\tau \) for all \(k\in {\mathbb {N}}\).
Proof of 2. Since \(\overline{{\mathcal {G}}}_h\) satisfies the same growth conditions as \({\mathcal {G}}_h\) (cf. (15)), Tonelli’s theorem leads to the existence of a minimiser of \(\overline{{\mathcal {G}}}_h\) in \(L_{\text {div}}^{p_+'}(\Omega ;{\mathbb {R}}^{m\times n})\). Since we have the identity \({\mathcal {G}}_h = \overline{{\mathcal {G}}}_h\) for all \(\tau \in L_{\text {div}}^{p_-'}(\Omega ;{\mathbb {R}}^{m\times n})\), it holds that
On the other hand, for any sequence \((\tau _k)_{k=1}^\infty \subset L_{\text {div}}^{p_-'}(\Omega ;{\mathbb {R}}^{m\times n})\) we have
Applying this observation to the definition of \(\overline{{\mathcal {G}}}_h\) shows
Proof of 3. The inclusion follows from the estimate in (16).
Proof of 4. We set for all \(\tau \in L_{\text {div}}^{p_+'}(\Omega ;{\mathbb {R}}^{m\times n})\) the functional
Let \(x\in \Omega \) and \(\xi \in {\mathbb {R}}^{m\times n}\). By definition we have \( \Phi _h(x,2\xi )=\phi _h(x,2\xi )+F(x):2\xi . \) Recall the constants \(C,C_0\) in the \(\Delta _2\)-condition (A2). Young’s inequality shows for the second addend
Set the function \(C_1 :=C_0 + \phi _h^*(\cdot ,2/(C+1)\, F) \in L^1(\Omega )\). Then the previous inequality and the \(\Delta _2\)-condition (A2) result in the \(\Delta _2\)-condition for \(\Phi _h\)
Hence, Proposition A6 yields \( \overline{{\mathcal {G}}}^0_h={\mathcal {G}}^0_h\) on \(\text {dom}\,\overline{{\mathcal {G}}}^0_h. \) The definition of the energy \({\mathcal {G}}_h\) in (17), the definition of its relaxation \(\overline{{\mathcal {G}}}_h\) in (18), and the regularity of the boundary data \(\psi \in W^{1,p_+}(\Omega ;{\mathbb {R}}^{m})\) lead to \(\text {dom}\,\overline{{\mathcal {G}}}_h = \text {dom}\,\overline{{\mathcal {G}}}^0_h\) and
Combining these observations concludes the proof.
Proof of 5. The convexity of \(\overline{{\mathcal {G}}}_h\) follows from the convexity of \({\mathcal {G}}_h\). Moreover, [11, Prop. 1.3.1] yields the lower semi-continuity of the relaxation functional \(\overline{{\mathcal {G}}}_h\) with respect to strong convergence in \(L_{\text {div}}^{p_+'}(\Omega ;{\mathbb {R}}^{m\times n})\). The weak lower semi-continuity follows from the lower semi-continuity and convexity of \(\overline{{\mathcal {G}}}_h\), see [17, Cor. 3.22] or [22, Chap. I, Cor. 2.2]. \(\square \)
The beneficial properties of \(\overline{{\mathcal {G}}}_h\) allow us to prove the following result.
Lemma 11
(Equality) We have
Proof
Let \((h_j)_{j=1}^\infty \subset {\mathbb {R}}_{>0}\) be a sequence with \(h_j \searrow 0\) as \(j\rightarrow \infty \). We denote for all \(j\in {\mathbb {N}}\) by \(\sigma _{j} \in L_{\text {div}}^{p_+'}(\Omega ;{\mathbb {R}}^{m\times n})\) a minimiser of \(\overline{{\mathcal {G}}}_{h_j}\). By the growth conditions (15) the sequence \((\sigma _{j})_{j=1}^\infty \subset L_{\text {div}}^{p_+'}(\Omega ;{\mathbb {R}}^{m\times n})\) is uniformly bounded in \(L_{\text {div}}^{p_+'}(\Omega ;{\mathbb {R}}^{m\times n})\). Thus, there exists a function \(\sigma \in L_{\text {div}}^{p_+'}(\Omega ;{\mathbb {R}}^{m\times n})\) and a weakly convergent subsequence (which we do not relabel) \(\sigma _{j} \rightharpoonup \sigma \) in \(L_{\text {div}}^{p_+'}(\Omega ;{\mathbb {R}}^{m\times n})\) as \(j\rightarrow \infty \). By Lemma 10(3) we have \(\sigma _j \in \text {dom}\,\overline{{\mathcal {G}}}_{h_j}\subset \text {dom}\,\overline{{\mathcal {G}}}\). Lemma 10(5), the identity in (16), the fact that \(\sigma _j\) is a minimiser, and the upper growth condition in (15) show
Hence, \(\sigma \in \text {dom}\,\overline{{\mathcal {G}}}\) and so Lemma 10(4) yields \({\mathcal {G}}(\sigma ) = \overline{{\mathcal {G}}}(\sigma )\). Lemma 63, \(\sigma _j\) being a minimiser of \(\overline{{\mathcal {G}}}_{h_j}\), and Lemma 8 result in
for all \( \tau \in L_{\text {div}}^{p_-'}(\Omega ;{\mathbb {R}}^{m\times n})\). This inequality and Lemma 10(2) yield
Combining this inequality with (20) shows
Since this result is true for subsequences of any sequence \(h_j\searrow 0\), we have
This and the upper bound in Lemma 9 lead to the identity in (19). \(\square \)
After these preliminary results we can complete the proof Lemma 5.
Proof of the claim in (13)
The duality of the primal and dual problems (Lemma 7) and the equality in (19) lead to
This concludes the proof of Lemma 5 under (A1)–(A3). \(\square \)
3 Examples on lavrentiev gap
First examples of energies \({\mathcal {F}}\) with non-standard growth (1) that experience a Lavrentiev gap go back to Zhikov [41]. A key idea in these examples is the construction of a function \(u\in W\) which satisfies for any sequence \((u_n)_{n\in {\mathbb {N}}} \subset H\) with \(u_n \rightarrow u\) in \(W^{1,p_-}(\Omega ;{\mathbb {R}}^m)\)
In the following examples we have \(m=1\), \(n=2\), and \(\Omega = (-1,1)^2\). For all \(x=(x_1,x_2) \in \Omega \) the function u reads \(u=(1-x_1^2-x_2^2)\, u_0(x)\) with

Scaling the boundary data leads for sufficiently large scaling parameters \(\lambda \) to the Lavrentiev gap phenomenon [5, Sec. 3.3]. Since the singularity of the function u is concentrated in the origin, examples of this type are called “one saddle point” or “checker board” setup.
In the following we summarise known examples for non-autonomous problems caused by a single saddle point. In all these examples we have the boundary data \(\psi = \lambda u_0\) with \(\lambda >0\), the right-hand side \(f \equiv 0\), and the following integrands for all \(x=(x_1,x_2) \in \Omega \) and \(\xi \in {\mathbb {R}}^2\).
-
(1)
Piece-wise constant variable exponent (Zhikov [41]). Let \(1<p_-<2<p_+<\infty \), then the integrand reads \(\phi (x,\xi ):={|{\xi }|}^{p(x)}/p(x)\) with

-
(2)
Continuous variable exponent (Zhikov [42], Hästo [27]). As in the previous example we have the \(p(\cdot )\)-Laplacian \(\phi (x,\xi ) :={|{\xi }|}^{p(x)}/p(x)\) but with power (with linear interpolation in the dashed regions)

-
(3)
Double phase potential (Zhikov [42], Esposito–Leonetti–Mingione [21]). This example involves the integrand \(\phi (x,\xi )=1/p_-\, {|{\xi }|}^{p_-}+a(x)/p_+\,{|{\xi }|}^{p_+}\) with powers \(1<p_-<2<2+\alpha<p_+<\infty \), where the constant \(\alpha \ge 0\) enters the weight

-
(4)
Borderline case of double phase potential (Balci–Surnachev [10]). This example involves constants \(\beta >1\), \(\gamma >1\) and the weight function a from the previous example with \(\alpha = 0\). The integrand reads
$$\begin{aligned} \phi (x,\xi )=\log ^{-\beta }(e+{|{\xi }|}) {|{\xi }|}^2+a(x)\log ^{\gamma }(e+{|{\xi }|}) {|{\xi }|}^2. \end{aligned}$$



Further examples involve fractal contact sets [5] or matrix-valued integrands [23]. The latter example was already treated numerically in [35].
4 Experiments
In this section we investigate the Lavrentiev gap phenomenon numerically. We approximate the W-solution by the non-conforming scheme introduced in Sect. 2 and the H-solution by a conforming scheme with exact (or at least more accurate) quadrature. The convergence of the latter scheme with exact quadrature to the H-minimiser has been shown in [14]. We denote the solutions to the non-conforming scheme by \(u_\text {nc}\in \text {CR}^1({\mathcal {T}}_h)\) and to the conforming scheme by \(u_\text {c}\in {\mathcal {L}}^1_1({\mathcal {T}})\), where \({\mathcal {L}}^1_1({\mathcal {T}})\) denotes the Lagrange space of continuous and piece-wise affine functions. The corresponding energies read \({\mathcal {F}}_h(u_\text {nc})\) and \({\mathcal {F}}(u_\text {c})\). Our computations utilise an adaptive mesh refinement strategy driven by the residual-based error indicator introduced in [34] for the non-conforming scheme. If not mentioned specifically, we solve the non-linear systems with a Newton scheme.
4.1 Model problems
In this subsection we apply our numerical scheme to the minimisation problems introduced in Sect. 3. These problems experience a Lavrentiev gap for all sufficiently large parameters \(\lambda > \lambda _0\) in the boundary data \(\psi = \lambda u_0\) with some unknown threshold \(\lambda _0\ge 0\). We use our numerical method to explore this threshold. This visualises the performance of our scheme and provides some insights for further analytical investigation.
4.1.1 Experiment 1 (piece-wise constant variable exponent)
In our computations for the first example in Sect. 3 we set the exponents \(p_- = 3/2\) and \(p_+=3\). Our initial triangulation resolves the domains for \(p_-\) and \(p_+\), which allows for an exact quadrature with piece-wise constant exponents. In particular, (A1)–(A3) as well as (B) are obviously satisfied. For the boundary data \(\psi = \lambda u_0\) with \(\lambda =1\) the exact solution reads \(u(x_1,x_2) = x_2\) for all \((x_1,x_2) \in \Omega \). The convergence history plots, displayed on the left-hand side of Fig. 1, indicate that there is no Lavrentiev gap for \(\lambda \le 1\) and that there is a gap for \(\lambda >1\). Moreover, the convergence history plot suggests the speed of convergence \(\min _W {\mathcal {F}} - {\mathcal {F}}(u_\text {nc}) = {\mathcal {O}}(\text {ndof}^{-1})\) and \({\mathcal {F}}(u_\text {c}) - \min _H {\mathcal {F}} = {\mathcal {O}}(\text {ndof}^{-1})\).

Convergence history plot of the distances \({\mathcal {F}}(u_\text {c})-{\mathcal {F}}(u_\text {nc})\) of the conforming and non-conforming solutions in Experiment 1 (left) and Experiment 3 (right), where the dashed lines --- indicate the rate \({\mathcal {O}}(\text {ndof}^{-1})\)

Computed energies of W- and H-solution (left) and the distance \({\mathcal {F}}(u_\text {c}) - {\mathcal {F}}_h(u_\text {nc})\) of the conforming and non-conforming solutions for various scalings \(\lambda \) (right) in Experiment 2
4.1.2 Experiment 2 (continuous variable exponent)
In this subsection we investigate the second example in Sect. 3. We set the exponents \(p_- = 3/2\) and \(p_+=3\). The initial triangulation resolves the domains for \(p_-\) and \(p_+\) and we use a minimum quadrature rule, that is, we choose the point \(x_T\in T\in {\mathcal {T}}\) in (A1) as the minimiser \(x_T = \text {argmin}_T p\). Hence, (A1)–(A3) is satisfied. Figure 2 displays the approximated energies \({\mathcal {F}}_h(u_\text {nc})\) of the W-solution and \({\mathcal {F}}(u_\text {c})\) of the H-solution as well as the differences \({\mathcal {F}}(u_\text {c}) - {\mathcal {F}}_h(u_\text {nc})\) of the approximated energies for various scaling parameters \(\lambda \).
Pre-asymptotically these differences converge with the constant rate \(\text {ndof}^{-1/2}\). After that pre-asymptotic regime, the speed of convergence slows down for \(\lambda \ge 3\), indicating a failure of convergence. This failure suggests a Lavrentiev gap for \(\lambda \ge 3\).
The rate of convergence \(\text {ndof}^{-1/2}\) (for \(\lambda = 2\) and pre-asymptotically for \(\lambda \ge 3\)) is smaller than the rate \(\text {ndof}^{-1}\) in the previous experiment. This reduced rate is caused by the minimum quadrature rule; the loss of midpoint symmetry reduces the order of accuracy. Numerical experiments indicate that the energy \({\mathcal {F}}(u_\text {nc})\) does, in contrast to the energy \({\mathcal {F}}_h(u_\text {nc})\), not converge to the W-minimiser. However, computing the minimum \(\min _{\text {CR}^1({\mathcal {T}}_h)} {\mathcal {F}}\) over the non-conforming space with a more accurate quadrature rule leads to faster convergence of the approximated energy to the W-minimiser.
4.1.3 Experiment 3 (double phase potential)
In this experiment we approximate the minimisers of the energy in the third example in Sect. 3 with parameters \(\alpha = 0\) as well as \(p_- = 3/2\) and \(p_+=3\). The initial triangulation resolves the weight function a, allowing for an exact quadrature with piece-wise constant weights. Thus, (A1)–(A3) hold true. The right-hand side in Fig. 1 displays the convergence history plot of the energies \({\mathcal {F}}(u_\text {c}) - {\mathcal {F}}(u_\text {nc})\). The plot indicates a Lavrentiev gap for \(\lambda \ge 0.4\).

Energies of W-solution and H-solution (top left), the distances \({\mathcal {F}}(u_\text {c}) - {\mathcal {F}}(u_\text {nc})\) of the conforming and non-conforming solutions for various scalings \(\lambda \) (top right), and the H-minimiser \(u_\text {c}\) (bottom left) as well as the W-minimiser \(u_\text {nc}\) (bottom right) for \(\lambda = 1\)
4.1.4 Experiment 4 (borderline case of double phase potential)
In this experiment we investigate the fourth example of Sect. 3 with parameters \(\beta = \gamma = 2\). As in the previous experiments we use an initial triangulation that resolves the weight function a, allowing for exact quadrature and (A1)–(A3). Since the Newton scheme struggles with the computation of the discrete minimiser, we utilise a fixed point iteration similar to the one introduced in [18] without regularisation. The paper [10] proves that the W-minimum grows asymptotically slightly slower than the H-minimum with respect to the scaling of the boundary data \(\psi = \lambda u_0\), leading to a gap for all sufficiently large parameters \(\lambda \). Our numerical experiments, displayed in Fig. 3, indicate a gap for all \(\lambda >0\). Moreover, the W- and H-solution differ significantly.

Convergence of computed energies with adaptive (solid line) and uniformly (dashed line) refined meshes to reference value from Experiment 1
4.2 Multiple saddle points
4.3 Bad quadrature/geometric regularisation
This experiment investigates the importance of an appropriate quadrature rule. Therefore, we perturb the quadrature in Experiment 1. Our initial triangulation resolves the piece-wise constant exponent \(p(\cdot )\). Thus, it has a node in the origin \(0\in \Omega \). Let \(\omega (0) \subset {\mathcal {T}}\) denote the nodal patch with respect to this node, that is, the set of all triangles \(T\in {\mathcal {T}}\) with \(0\in T\). Our perturbed piece-wise constant exponents read
Notice that these approximations converge to the exact exponent p as the mesh is refined. We minimise the functionals

Variable exponent p (top left), the distances \({\mathcal {F}}(u_\text {c}) - {\mathcal {F}}(u_\text {nc})\) of the conforming and non-conforming solutions for various scalings \(\lambda \) (top right), and the H-minimiser \(u_\text {c}\) (bottom left) as well as the W-minimiser \(u_{\text {nc}}\) (bottom right) for \(\lambda = 5\)
over the Lagrange and Crouzeix-Raviart space with boundary data \(\psi = \lambda u_0\) and \(\lambda = 5\). The corresponding solutions read \(u_\text {c}^\text {max} \in {\mathcal {L}}^1_1({\mathcal {T}})\) and \(u_\text {nc}^\text {max} \in \text {CR}^1({\mathcal {T}}_h)\) as well as \(u_\text {c}^\text {min} \in {\mathcal {L}}^1_1({\mathcal {T}})\) and \(u_\text {nc}^\text {min} \in \text {CR}^1({\mathcal {T}}_h)\). Figure 4 compares the resulting energies with a reference solution computed in Experiment 1 on the finest triangulation. It indicates that the minimisation of the energy \({\mathcal {F}}_\text {max}\) over the conforming and non-conforming space leads to the H-minimiser; the minimisation of the energy \({\mathcal {F}}_\text {min}\) over the conforming and non-conforming space leads to the W-minimiser. This shows that the conforming scheme requires exact or at least some suitable quadrature to converge to the H-minimiser. Moreover, our computations indicate that it might be possible to design a conforming scheme that converges to the W-minimiser by introducing a regularisation near singularities. However, the adaptive scheme experiences difficulties after \(\text {ndof} = \dim \text {CR}^1({\mathcal {T}}_h)\) exceeds \(10^4\). Thus, its convergence to the exact W-minimiser is unclear.
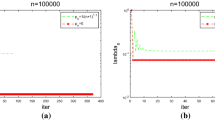
The last example explores the Lavrentiev gap phenomenon for a problem with three saddle points. More precisely, we compute the W- and H-minimiser of the variable exponent \(p(\cdot )\)-Laplacian \(\int _\Omega |\nabla _h\cdot |^{p(x)}/p(x)\, \mathrm {d}x\) on the domain \(\Omega = (-1,5)\times (-1,1)\) with boundary data \(\psi (x_1,x_2) = \lambda x_2\) for all \((x_1,x_2) \in {\overline{\Omega }}\) and parameters \(\lambda >0\). The piece-wise constant exponent (visualised in Fig. 5) attains the values \(p_- = 3/2\) and \(p_+ = 3\) and reads for all \((x_1,x_2)\in \Omega \)
For \(\lambda = 1\) the exact minimiser reads \(u(x_1,x_2) = x_2\) for all \((x_1,x_2) \in \Omega \). The initial triangulation resolves the exponent p. Thus, we can apply an exact quadrature with piece-wise constant exponents satisfying (A1)–(A3). Figure 5 displays a convergence history plot of the energies for various \(\lambda \) as well as a plot of the H- and W-minimiser for \(\lambda = 5\). As in Experiment 1, it seems that there is a gap for \(\lambda >1\). The W-minimiser seems to jump for \(\lambda >1\) in all three saddle points.
5 Conclusion
In this paper we have successfully adapted the Crouziex–Raviart finite element scheme to approximate variational problems with non-autonomous integrands even in the presence of the Lavrentiev gap phenomenon. We have identified assumptions on which convergence is guaranteed, and have demonstrated numerically on a wide range of test cases that the scheme is practical and can reliably predict the existence (or non-existence) of Lavrentiev gaps. The examples we considered here are of primary interest to the theoretical study of regularity of solutions to variational problems. Indeed we hope that our numerical scheme could be employed more generally towards refining and extending the analytical results based on which we chose our examples.
More generally, however, our results provide strong new evidence for the advantages of non-conforming methods in the numerical solution of difficult variational problems. On that theme, we note that a long-standing open problem is the extension of our convergence results to poly-convex or even quasi-convex integrands. Further investigation might involve the use of problem dependent strategies, as for example done in [4, 19, 20] for conforming and in [3, 12, 15, 26] for non-conforming schemes for problems without Lavrentiev gap, to conclude rates of convergence and to relax some assumptions like the growth condition (1) for specific problems.
References
Ball, J.M.: “Singularities and computation of minimizers for variational problems”. In: Foundations of computational mathematics (Oxford, 1999). Vol. 284. London Math. Soc. Lecture Note Ser. Cambridge Univ. Press, Cambridge, 1–20 (2001)
Ball, J.M.: Discontinuous equilibrium solutions and cavitation in nonlinear elasticity’. Philos. Trans. Roy. Soc. London Ser. A 306(1496), 557–611 (1982). https://doi.org/10.1098/rsta.1982.0095
Bartels, S.: Nonconforming discretizations of convex minimization problems and precise relations to mixed methods. Comput. Math. Appl. 93, 214–229 (2021). https://doi.org/10.1016/j.camwa.2021.04.014
Breit, D., Diening, L., Schwarzacher, S.: Finite element approximation of the \(p(\cdot )\)-Laplacian. SIAM J. Numer. Anal. 53(1), 551–572 (2015). https://doi.org/10.1137/130946046
Balci, A.K., Diening, L., Surnachev, M.: New Examples on Lavrentiev Gap Using Fractals. Calc. Var. Partial Differential Equations 59(5), 180 (2020). https://doi.org/10.1007/s00526-020-01818-1
Ball, J.M., Knowles, G.: A numerical method for detecting singular minimizers. Numer. Math. 51(2), 181–197 (1987). https://doi.org/10.1007/BF01396748
Bai, Y., Li, Z.P.: A truncation method for detecting singular minimizers involving the Lavrentiev phenomenon. Math. Models Methods Appl. Sci. 16(6), 847–867 (2006). https://doi.org/10.1142/S0218202506001376
Buffa, A., Ortner, C.: Compact embeddings of broken Sobolev spaces and applications. IMA J. Numer. Anal. 29(4), 827–855 (2009). https://doi.org/10.1093/imanum/drn038
Bogovskii, M.E.: “Solutions of some problems of vector analysis, associated with the operators div and grad”. In: Theory of cubature formulas and the application of functional analysis to problems of mathematical physics. Vol. 1980. Trudy Sem. S. L. Soboleva, No. 1. Akad. Nauk SSSR Sibirsk. Otdel., Inst. Mat., Novosibirsk, 5–40, 149 (1980)
Balci, A.K., Surnachev, M.: Lavrentiev gap for some classes of generalized Orlicz functions. In: Nonlinear Anal. 207, 112329, 22 (2021). https://doi.org/10.1016/j.na.2021.112329
Buttazzo, G.: Semicontinuity, relaxation and integral representation in the calculus of variations. Vol. 207. Pitman Research Notes in Mathematics Series. Longman Scientific & Technical, Harlow; copublished in the United States with John Wiley & Sons, Inc., New York, (1989), pp. iv+222
Carstensen, C., Liu, D.J.: Nonconforming FEMs for an optimal design problem. SIAM J. Numer. Anal. 53, 874–894 (2015). https://doi.org/10.1137/130927103
Colombo, M., Mingione, G.: Bounded minimisers of double phase variational integrals. Arch. Ration. Mech. Anal. 218(1), 219–273 (2015). https://doi.org/10.1007/s00205-015-0859-9
Carstensen, C., Ortner, C.: Analysis of a class of penalty methods for computing singular minimizers. Comput. Methods Appl. Math. 10(2), 137–163 (2010). https://doi.org/10.2478/cmam-2010-0008
Carstensen, C., Peterseim, D., Schedensack, M.: Comparison results of finite element methods for the Poisson model problem. SIAM J. Numer. Anal. 50(6), 2803–2823 (2012). https://doi.org/10.1137/110845707
Carstensen, C., Tran, T.: Unstabilized hybrid high-order method for a class of degenerate convex minimization problems. SIAM J. Numer. Anal. 59(3), 1348–1373 (2021). https://doi.org/10.1137/20M1335625
Dacorogna, B.: Direct methods in the calculus of variations. Second. Vol. 78. Applied Mathematical Sciences. Springer, New York, xii+619 (2008)
Diening, L., Fornasier, M., Tomasi, R., Wank, M.: A Relaxed Kačanov iteration for the p-poisson problem. Numer. Math. 145(1), 1–34 (2020). https://doi.org/10.1007/s00211-020-01107-1
Diening, L., R\({\mathring{{\rm u}}}\)žička, M.: Interpolation operators in Orlicz- Sobolev spaces. Numer. Math. 107(1), 107–129 (2007). https://doi.org/10.1007/s00211-007-0079-9
Ebmeyer, C., Liu, W.: Quasi-norm interpolation error estimates for the piecewise linear finite element approximation of p-Laplacian problems. Numer. Math. 100(2), 233–258 (2005). https://doi.org/10.1007/s00211-005-0594-5
Esposito, L., Leonetti, F., Mingione, G.: Sharp regularity for functionals with (\(p, q\)) growth. J. Differential Equations 204(1), 5–55 (2004). https://doi.org/10.1016/j.jde.2003.11.007
Ekeland, I., Temam, R.: Convex analysis and variational problems. Translated from the French, Studies in Mathematics and its Applications, Vol. 1. North-Holland Publishing Co., Amsterdam- Oxford; American Elsevier Publishing Co., Inc., New York, ix+402 (1976)
Foss, M., Hrusa, W.J., Mizel, V.J.: The Lavrentiev gap phenomenon in nonlinear elasticity. Arch. Ration. Mech. Anal. 167(4), 337–365 (2003). https://doi.org/10.1007/s00205-003-0249-6
Fonseca, I., Malý, J., Mingione, G.: Scalar minimizers with fractal singular sets. Arch. Ration. Mech. Anal. 172(2), 295–307 (2004)
Feng, X., Schnake, S.: An enhanced finite element method for a class of variational problems exhibiting the Lavrentiev gap phenomenon. Commun. Comput. Phys. 24(2), 576–592 (2018). https://doi.org/10.4208/cicp.oa-2017-0046
Gudi, T.: A new error analysis for discontinuous finite element methods for linear elliptic problems. Math. Comp. 79(272), 2169–2189 (2010). https://doi.org/10.1090/S0025-5718-10-02360-4
Hästö, P.A.: Counter-examples of regularity in variable exponent Sobolev spaces. In: The p-harmonic equation and recent advances in analysis. Vol. 370. Contemp. Math. Amer. Math. Soc., Providence, RI, 133–143 (2005)
Harjulehto, P., Hästö, P.: Generalized Orlicz Spaces. Cham: Springer International Publishing, (2019). https://doi.org/10.1007/978-3-030-15100-3_3
Hansbo, P., Larson, M.G.: Discontinuous Galerkin and the Crouzeix-Raviart element: Application to elasticity. en. ESAIM Math. Model. Numer. Anal. 37(1), 63–72 (2003)
Krasnoselskii, M.A., Rutickii, J.B.: Convex functions and Orlicz spaces. Translated from the first Russian edition by Leo F. Boron. P. Noordhoff Ltd., Groningen, 249 (1961)
Li, Z.P.: Element removal method for singular minimizers in variational problems involving Lavrentiev phenomenon. Proc. Roy. Soc. London Ser. A 439(1905), 131–137 (1992). https://doi.org/10.1098/rspa.1992.0138
Li, Z.P.: A numerical method for computing singular minimizers. Numer. Math. 71(3), 317–330 (1995). https://doi.org/10.1007/s002110050147
Marcellini, P.: Regularity of minimizers of integrals of the calculus of variations with nonstandard growth conditions. Arch. Rational Mech. Anal. 105(3), 267–284 (1989). https://doi.org/10.1007/BF00251503
Ortner, C., Praetorius, D.: On the convergence of adaptive nonconforming finite element methods for a class of convex variational problems. SIAM J. Numer. Anal. 49(1), 346–367 (2011). https://doi.org/10.1137/090781073
Ortner, C.: Nonconforming finite-element discretization of convex variational problems. IMA J. Numer. Anal. 31(3), 847–864 (2011). https://doi.org/10.1093/imanum/drq004
Pastukhova, S.E.: A posteriori estimates for deviation from the exact solution in variational problems with nonstandard coercivity and growth conditions. Algebra i Analiz 32(1), 51–77 (2020)
Pastukhova, S.E., Khripunova, A.S.: Gamma-closure of some classes of nonstandard convex integrands. In: vol. 177. 1. Problems in mathematical analysis. No. 59. 83–108 (2011). https://doi.org/10.1007/s10958-011-0449-9
Visintin, A.: Strong convergence results related to strict convexity. Communications in Partial Differential Equations 9(5), 439–466 (1984)
Zhikov, V.V.: On variational problems and nonlinear elliptic equations with nonstandard growth conditions. In: 173(5), 463–570 (2011)
Zhikov, V.V.: Questions of convergence, duality and averaging for functionals of the calculus of variations. Izv. Akad. Nauk SSSR Ser. Mat. 47(5), 961–998 (1983)
Zhikov, V.V.: Averaging of functionals of the calculus of variations and elasticity theory. Izv. Akad. Nauk SSSR Ser. Mat. 50(4), 675–710, 877 (1986)
Zhikov, V.V.: On Lavrentiev’s phenomenon. Russian J. Math. Phys. 3(2), 249–269 (1995)
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The research of A. Kh. Balci and J. Storn was supported by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) - SFB 1283/2 2021 - 317210226. The research of C. Ortner was supported by the Natural Sciences and Engineering Research Council of Canada (NSERC) [funding reference number IDGR019381].
Appendix A: Variational calculus background
Appendix A: Variational calculus background
This paper, in particular Sect. 2.4, relies on numerous analytical results. We present these results and needed calculations in this appendix. Most of these calculations rely the following properties of convex functions \(\phi ,\chi \) and their convex conjugates \(\phi ^*,\chi ^*\) (see (7) for a definition).
Proposition A1
Let \(a,b>0\) be positive numbers, then there holds
-
(1)
\((a\, \phi (b \xi ))^* = a\, \phi ^*(\xi /(ab))\) for all \(\xi \in {\mathbb {R}}^{m\times n}\),
-
(2)
if \(\chi \le \phi \), then \(\phi ^* \le \chi ^*\),
-
(3)
\((\phi +a)^*=\phi ^*-a\).
Proof
These properties follow from the definition of the convex conjugate and simple calculations, see [30] or [28, Lem. 2.4.3] for details. \(\square \)
In the remainder of this appendix \(\phi :\Omega \times {\mathbb {R}}^{m\times n}\rightarrow {\mathbb {R}}\) is convex in its second component and satisfies the following generalised version of the growth condition in (1). There exists a function \(c_0 \in L^1(\Omega )\) and positive constants \(c_1,c_2<\infty \) such that for almost all \(x\in \Omega \) and all \(\xi \in {\mathbb {R}}^{m\times n}\)
In addition, certain results require the following generalised versions of the assumptions in (A2) and (A3).
Definition A2
(\(\Delta _2\)- and \(\nabla _2\)-condition) We say that \(\phi \) satisfies the generalised \(\Delta _2\)-condition if there exists a constant C and a function \({\tilde{C}}\in L^1(\Omega )\) for all \(\xi \in {\mathbb {R}}^{m\times n}\) and almost all \(x\in \Omega \) such that
We say that \(\phi \) satisfies the generalised \(\nabla _2\)-conditions if \(\phi ^*\) satisfies the generalised \(\Delta _2\)-condition, that is, there exists a constant K and a function \({\tilde{K}}\in L^1(\Omega )\) for all \(\xi \in {\mathbb {R}}^{m\times n}\) and almost all \(x\in \Omega \) such that
The following proposition shows the equivalence of the assumption in (A3) and the \(\nabla _2\)-condition.
Proposition A3
(\(\nabla _2\)-condition) Let \(x\in \Omega \) and \(\xi \in {\mathbb {R}}^{m\times n}\). Then the inequality in (A3) is equivalent to
Proof
Let \(x \in \Omega \) and \(\xi \in {\mathbb {R}}^{m\times n}\). Lemma A1 and (A4) yield
Substituting \(\xi \) by \(2K\xi \) implies (A3). A similar calculation shows that (A3) implies (A4). \(\square \)
In order to include boundary conditions and right-hand sides, we have to shift the integrand. The following proposition shows that these shifts do not cause difficulties, since the resulting integrands are equivalent up to a function \({\tilde{c}}_1 \in L^1(\Omega )\).
Proposition A4
(Weak equivalence) Suppose that the integrand \(\phi \) satsifies the \(\nabla _2\)-condition (A3). Let \(F \in L^{p_{-}'}(\Omega ;{\mathbb {R}}^{m\times n})\) and define the integrand
Then there exist a function \({\tilde{c}}_1 \in L^1(\Omega )\) such that we have for almost all \(x\in \Omega \) and all \(\xi \in {\mathbb {R}}^{m\times n}\)
Proof
Let \(x\in \Omega \) and \(\xi \in {\mathbb {R}}^{m\times n}\). Young’s inequality, the \(\nabla _2\)-condition (A3), and the growth (A1) (leading to growth conditions for \(\phi ^*\), cf. (8)) yield
Thus, the function \({\tilde{c}}_1 :=K( c_1^{1-p_-'}{|{F}|}^{p_{-}'} +{c}_0)/2 \in L^1(\Omega )\) satisfies
Using this inequalities and the definition of \(\phi _1\) concludes the proof. \(\square \)
The following result shows that pointwise convergence implies pointwise convergence of the convex conjugate.
Proposition A5
([37, Lem. 5.4]) For all \(h>0\) let \(\phi _h:\Omega \times {\mathbb {R}}^{m\times n} \rightarrow {\mathbb {R}}\) be a function that satisfies the nonstandard growth condition (A1) and that is is convex in its second component. Then pointwise convergence of the primal functions \(\phi _h\) implies pointwise convergence of the corresponding convex conjugates \(\phi ^*_h\) in the sense that for \(x\in \Omega \) and \(\xi \in {\mathbb {R}}^{m\times n}\)
We conclude this appendix with a result involving the relaxation (see (18)) of the energy \( {\mathcal {G}} :=\int _\Omega \phi ^*(x,\cdot )\, \mathrm {d}x\). Notice that Zhikov states the result for scalar-valued functions, that is \(m=1\). A review of his proof shows that the result extends verbatim to vector-valued functions, that is \(m\in {\mathbb {N}}\).
Proposition A6
([39, Thm. 11.10]) If \(\phi \) satisfies the \(\Delta _2\)-condition (A2), then it holds that
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Balci, A.K., Ortner, C. & Storn, J. Crouzeix-Raviart finite element method for non-autonomous variational problems with Lavrentiev gap. Numer. Math. 151, 779–805 (2022). https://doi.org/10.1007/s00211-022-01303-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00211-022-01303-1