
Abstract
The focus of this study is on solving the coordination problem between distance relays (DISRs) and directional overcurrent relays (DOCRs), which is a complex nonlinear problem with various constraints. Ensuring proper coordination between DOCRs and distance relays is critical for maintaining the security of electrical networks. The primary objective of employing optimization algorithms is to determine the optimal operating time for zone-2 of distance relays, as well as the DOCRs setting, time dial setting (TDS), and pickup current (Ipickup). The optimization techniques must also guarantee that the primary and backup relays operate in sequence without any violation. To this end, both recent and well-established optimization algorithms are evaluated using an 8-bus network, with the aim of determining the DOCRs setting and the optimal operating time for zone-2 of distance relays. Furthermore, a comparative analysis of different optimization algorithms, including both traditional and recent techniques, is conducted.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Over the past decade, the electrical network has become increasingly complex, with its size rapidly expanding and the complexity of its operation rising [1]. In order to maintain the security of the electric network at a high level, protective relays play a critical role in isolating fault sections and keeping healthy parts of the network in operation [2]. Sub-transmission and transmission lines are the backbone of the power system, and the use of DOCRs and DISRs is widespread in protecting these lines [3, 4]. The primary protection for DISRs is provided by the first zone, which is set to instantaneously isolate faults on 80–90% of the protected transmission line. The second zone of DISRs serves as backup protection and is responsible for protecting the remainder of the transmission line with an adequate margin [5]. In order to maintain the security of the power network, both DISRs and DOCRs must be properly coordinated. This coordination can be achieved by setting the DOCRs' pickup current, time dial setting (TDS), and operating time of zone-2 for DISRs appropriately.
The coordination problem between DISRs and DOCRs is a complex and nonlinear optimization problem with various constraints [3, 6]. The primary objective of protective relays is to quickly isolate faults in order to minimize the outage of the electric network. If the main relays fail, the backup relays must isolate the faulty sections after a specific coordination time interval (CTI) [7, 8]. Many algorithms have been suggested in the literature to solve the coordination problem for DOCRs, including teaching learning-based optimization (TLBO) [9], Harmony search algorithm (HS) [10], Modified Water Cycle Technique (MWCA) [1], Seeker algorithm [11], BBO-Differential Evaluation (DE) [12], Electromagnetic Field Optimization (EFO) [13], genetic algorithm (GA) [14], Ant colony optimization (ACO) [15, 16], Evaporation Rate Water Cycle Technique [17], and particle swarm optimization (PSO) [18]. However, few algorithms have been proposed to solve the coordination problem for the combined protection scheme of DOCRs and DISRs, such as linear programming (LP) [19], improved seagull optimization algorithm [6], multiple embedded cross-over particle swarm optimization (MEPSO) [20], and modified heap-based optimizer (MHBO) [21]. In this paper, various optimization techniques, including PSO, GA, TLBO, Grey Wolf Optimizer (GWO), Marine Predators Algorithm (MPA), African vulture optimization algorithm (AVOA), Flow Direction Algorithm (FDA), and Gorilla Troops Optimizer (GTO), are proposed to solve the constrained nonlinear coordination problem of DOCRs and DISRs and to obtain optimal settings for coordination.
The primary objective of solving the coordination problem is to minimize the total operating time of zone-2 for DISRs and DOCRs in a combination protection scheme. To ensure proper coordination, various fault positions are simulated to ascertain the time delay between the main and backup relays along the length of the protected line. The efficacy of the proposed optimization algorithms is evaluated on the 8-bus network, and a comparison with recent and established algorithms is performed. The findings reveal that the TLBO algorithm is robust in reducing the operating time of both DOCRs and zone-2 for DISRs, while also resolving the coordination problem. Moreover, the suggested algorithms maintain the correct sequential operation of relay pairs.
2 Problem formulation
DOCRs and DISRs are installed at both ends of the transmission line to protect the electric system. The coordination between the combination of DISRs and DOCRs is considered a non-linear optimization problem. This problem has many limitations. The main goal of solving the coordination problem is to keep the continuity of the electrical networks. This target can be accomplished by getting the DOCRs setting, TDS and Ip, and operating time of zone-2 for DISRs. These settings shall minimize the summation of the operating times for all DOCRs primary relays and operating time for zone-2. Also, the DOCRs setting, TDS and Ip, and operating time of zone-2 for DISRs shall maintain the validation of the sequential operation between relay pairs [22]. The coordination problem of combination distance and directional overcurrent relays is considered a constraint optimization problem [3]. The objective function of the coordination problem of combination DOCRs and DISRs can be described as follows:
where TZone-2 is the operating time of the zone-2 distance relay, n is the number of relays, K maximum number of DOCRs, and M is the maximum number of distance relays. The Tp is the operating time of primary of DOCRs, which can be described according to IEC-60225 as [1, 2]:
where A and B are constant and are equal to 0.14 and 0.002, respectively. The Ifault is the fault current, CTratio is the ratio of the current transformer, and PS is the plug setting of relay n [7]. Two categories of constraints; relay characteristics constraints and coordination constraints, shall be maintained during minimising the operating time of all DOCRs primary relays and zone-2 of DISRs.
2.1 Boundaries on DOCRs characteristics and operating time of zone-2
The boundaries of DOCRs settings can be described as follows:
where Ipickupmini and Ipickupmaxi are the boundaries for Ipickup. The TDSmaxi and TDSmini are the upper and lower of TDS settings. The range of TDS is based on the DOCRs manufacturer [1]. The Psmaxi and Psmini are the maximum and minimum range for PS, respectively [1, 2].
The boundary on Tzone-2 for DISRs can be described as [3]:
where Tzone-2 mini and Tzone-2 maxi is the lower and upper limits of operating time for zone-2 of DISRs, respectively.
2.2 Coordination constraints
The coordination time margin (CTI) is required between backup and main relays to maintain system stability. To satisfy the selectivity requirement, the backup relays shall be initiated if the main relays failed to operate as the backup and main relays sense the faults simultaneously [2]. Both DOCRs and DISRs can work as backup or main relays.
To maintain proper coordination between relay pairs, coordination should guarantee between DISR to back up DOCRs, DOCRs to backup DISRs, and DOCRs to DOCRs.
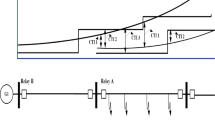
As shown in Fig. 1, there are four faults positions, from fault 1 to fault 4, which are considered for coordination between DISRs and DOCRs. For fault1, backup DOCRs shall isolate fault after a time delay in case of main DCRs fail to operate as shown in Fig. 1. This boundary can be expressed as follows:

Coordination between relay pairs
Also, the coordination between the main DOCRs and backup DISRs shall be maintained. This boundary can be expressed as:
For fault2, main DISRs zone-1 shall clear fault instantaneously and backup DOCR shall operate fault 2 after the time margin in case of the main relay failed to clear this fault as shown in Fig. 1. This boundary can be formulated as:
where TZone-1 is the operating times for main DISR zone-1.
In case of fault happened in fault3, the backup relay DOCR shall isolate fault3 after CTI if the main DOCRs do not succeed to clear the fault. This constraint can be expressed as follows:
For fault 4, backup DISRs shall operate to clear fault 2 after a time delay in case of main DOCRs fails to clear the fault. This constraint can be expressed as follows:
3 Proposed optimization algorithm
3.1 Particle swarm optimization (PSO)
The particle swarm optimization (PSO) algorithm is a population-based stochastic. It is based on swarm theory and it mimics cooperative and social behaviour hunting and navigation of animals as fish schooling to fill their needs. PSO initialized feasible random particles. These particles follow the optimum particles and fly through the problem space. According to its own experience and the experience of nearby particles, the particle modifies its position [23].
3.2 Genetic algorithm (GA)
The genetic algorithm (GA) is based on the natural selection of genes and it mimics Darwinian concepts [12,13,14]. GA initialize with random solutions, called chromosomes. Genes are encoded into the chromosome. In each iteration genetic principles, crossover and mutation, are applied. Based on the fitness value, the genes are assessed and selected and a new population is formed. The entire cycle is repeated and endeavours to get the optimal solution [24].
3.3 GWO grey wolf optimizer (GWO)
The GWO Grey Wolf Optimizer (GWO) mimics the leadership hunting technique of grey wolves in nature. During a hunt, wolves surround their target and advance to attack. The positions of the prey are better known to the top three wolves. The other wolves update their position based on these three wolves [25].
3.4 Teaching learning-based optimization (TLBO)
Teaching Learning-Based Optimization (TLBO) algorithm is based on the impact of a teacher on students. It mimics the behaviour of teachers and students in a class. A good teacher enhances the performance of learners in class. The students enhance their performance in groups and follow the teacher. Also, students try to improve their performance by interacting with other learners [26].
3.5 Marine predators algorithm (MPA)
Marine Predators Algorithm (MPA) is a population-based technique. It simulates Brownian and Levy motions in ocean predators and has an optimal encounter rate strategy for predator–prey interactions. Both prey and predator are regarded as search agents. MPA follows the natural laws that control the best foraging technique and encounter ratio between predator and prey in marine ecosystems. At each iteration, the prey is looking for its own food. Also, the predator is looking for its prey. In case of a better predator replaces the top predator, the Elite will be updated [27].
3.6 Flow direction algorithm (FDA)
Flow Direction Algorithm (FDA) is a population-based algorithm. FDA emulates the flow direction to the drainage basin outlet point with the lowest height. In other words, flow moves to the neighbour with the best goal function or lowest high. The quantity of excess or effective rainfall in a drainage basin is the amount of rain that fell but did not percolate into the soil. Direct runoff is actually the quantity of water that remains on the ground surface after precipitation and losses such as interception, evapotranspiration, and infiltration [28].
3.7 African vultures optimization algorithm (AVOA)
African vulture optimization algorithm (AVOA) mimics the navigation and foraging behaviours of African vultures in nature. The AVOA calculates the objective function of all solutions. Then divide vultures into two categories, where the best solutions are considered as best vultures and other solutions try to follow the best vultures. The worst solution is considered the weakest. The vultures try to follow the best solution and keep away from the worst solution [29].
3.8 Gorilla troops optimizer (GTO)
Gorilla Troops Optimizer (GTO) mimic the collective life of gorillas such as rest, travelling, eating, and talking during the day. GTO is based on the group behaviours of gorillas, who exhibit a variety of methods that are emulated, including migration to an unknown area, migrating to another gorilla, migration in the direction of a defined site, following the silverback, and competing for adult females [30].
4 Results and discussion
The ability of different algorithms in solving the coordination problem of DOCRs and DISRs is assessed in terms of minimising the summation of DOCRs operating time and operating time of zone-2 of DISRs. The proposed algorithms have been tested to solve the coordination problem using the 8-bus network. In this paper, the operating for zone-2 limits are 0.2 and 1.5 s [3, 20]. The limit ranges for TDS are 0.05 and 1.1. The CTI1 to CTI 5 is set to 0.2 s [21]. The different fault locations as shown in Fig. 1 are conducted using DigSILENT software [31]. A 2.3 GHz PC with 8 GB of RAM and Windows 10 operating systems were used to run the suggested optimization algorithms algorithm in the MATLAB environment.
4.1 8-bus network
Different algorithms are tested on the 8- bus system. As shown in Fig. 2, this system has 7- lines, 14 DOCRs and 14 DISRs, 42 decision variables. The details of this system such as Ipickup ranges are given in [32].

Single line diagram for 8-bus system
The optimal values of DOCRs settings (\(\mathrm{Ip}\) and TDS), operating time for primary DOCRs and Tzone-2 for each DISR using PSO, GA, TLBO, and GWO are tabulated in Tables 1 and 2. As shown from this table, the tested optimization algorithms succeed to find DOCRs settings and operating time of zone-2 for distance relays within limit ranges of \(\mathrm{Ip}\) Ip, TDS, and Tzone-2. The optimal values of Tzone-2 for DISRs, DOCRs settings, and operating time for primary DOCRs using MPA, AVOA, FDA, and GTO are given in Tables 3 and 4. As shown from this table, the MPA, AVOA, FDA, and GTO algorithms succeed to obtain the operating time of zone-2 and DOCRs settings within the boundaries range of TDS, \(\mathrm{Ip}\) Ip, and Tzone-2. From Tables 1 and 2, it can be noticed the objective function (15.13 s) by the TLBO algorithm is better than the objective functions that obtained by other algorithms.
The operating time for main and backup DOCRs and time margin using well-known and recent techniques are given in Tables 5 and 6. From these tables, it can be noticed that the primary relays will operate first and the backup relays will operate after discrimination time in case of failure of the primary relay. It can say that the suggested optimization algorithms maintain the sequential operation between primary and backup relays. Where the time difference between the operating time for primary relays and the operating time for backup is greater than the specified coordination time margin (CTI).
The time margin between relay pairs at Fault 1, Fault 2, and Fault 3 using PSO and GA are shown in Table 7. As shown from this table the PSO and GA algorithms succeed to maintain the sequential operation relay pairs without any violation. As time margin between the main and backup relays at the different fault locations is greater than the specified margin.
The coordination time margins at Fault 1, Fault 2, and Fault 3 using TLBO and GWO are given in Table 8. From this table, it can be noticed that the TLBO and GWO algorithms succeed to keep sequential operations without any miscoordination between relay pairs. As time margin between the main and backup relays at the different fault locations is greater than the specified margin.
The CTI at Fault 4 using PSO, GA, TLBO and GWO are given in Table 9. From this table, it can be observed that the time margin between the main and backup relays is greater than the specified time delay. From Tables 7 and 9, it can be noticed that tested optimization algorithms maintain the coordination between primary and backup relays along protected transmission lines.
The coordination time margins at Fault 1, Fault 2, and Fault 3 using MPA and AVOA are given in Table 8. From this table, it can be noticed that the MPA and AVOA algorithms succeed to keep sequential operations without any miscoordination between relay pairs. As time margin between the main and backup relays at the different fault locations is greater than the specified margin.
The time margin between relay pairs at Fault 1, Fault 2, and Fault 3 using FDA and GTO are shown in Table 11. As shown from this table FDA and GTO algorithms succeed to maintain the sequential operation relay pairs without any violation. As time margin between the main and backup relays at the different fault locations is greater than the specified margin.
The CTI at Fault 4 using MPA, AVOA, FDA, and GTO are given in Table 12. From this table, it can be observed that the time margin between the main and backup relays is greater than the specified time delay. From Tables 10 and 12, it can be noticed that tested optimization algorithms maintain the coordination between primary and backup relays along protected transmission lines.
From Tables 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, it can be noticed that the proposed optimization techniques satisfy all the boundaries of DISRs and DOCRs and settings and keep the discrimination between primary ad backup relays at the different fault locations.
The convergence curve of the suggested algorithms is shown in Fig. 3. From this figure, it can be observed that the TLBO algorithm obtained the optimal relay settings and reached better convergence compared with other optimization algorithms. Where the OF value using TLBO (15.13 s) is less than the other optimization techniques.

Objective function of the different optimization algorithms
The comparison between recent and well-known algorithms for solving the coordination problem of DOCRs in combination with DISRs is shown in Table 13. The obtained results from this table show that the total operating times of DOCRs and the total operating zone-2 of DISRs using the TLBO algorithm are lower than those computed by other algorithms.
5 Conclusion
In conclusion, this paper tackled the challenging nonlinear coordination problem between DOCRs and DISRs using a variety of optimization algorithms, including PSO, GA, TLBO, GWO, MPA, AVOA, FDA, and GTO. The goal was to minimize the total operating time of DOCRs and Tzone-2 of DISRs while maintaining the selectivity between relay pairs. The performance of these algorithms was evaluated on an 8-bus system, and a comparison between recent and traditional optimization algorithms was conducted to identify the most competitive techniques. The results demonstrated the effectiveness of the proposed optimization algorithms in maintaining selectivity between relay pairs without any violation. Moreover, the TLBO algorithm outperformed other optimization methods, achieving better convergence and obtaining the optimal relay settings with a lower objective function value.
Data availability
Data are available on reasonable request.
References
Korashy A, Kamel S, Youssef A-R, Jurado F (2019) Modified water cycle technique for optimal direction overcurrent relays coordination. Appl Soft Comput 74:10–25
Korashy A, Kamel S, Jurado F, Youssef A-R (2019) Hybrid whale optimization algorithm and grey wolf optimizer algorithm for optimal coordination of direction overcurrent relays. Electr Power Compon Syst 47:644–658
Rivas AEL, Pareja LAG, Abrão T (2019) Coordination of distance and directional overcurrent relays using an extended continuous domain ACO algorithm and an hybrid ACO algorithm. Electr Power Syst Res 170:259–272
Ahmadi S-A, Karami H, Gharehpetian B (2017) Comprehensive coordination of combination directional overcurrent and distance relays considering miscoordination reduction. Int J Electr Power Energy Syst 92:42–52
Moravej Z, Jazaeri M, Gholamzadeh M (2012) Optimal coordination of distance and over-current relays in series compensated systems based on MAPSO. Energy Convers Manage 56:140–151
Farzinfar M, Jazaeri M, Razavi F (2014) A new approach for optimal coordination of distance and directional over-current relays using multiple embedded crossover PSO. Int J Electr Power Energy Syst 61:620–628
Korashy A, Kamel S, Youssef A-R, Jurado F (2020) Development and application of an efficient optimizer for optimal coordination of directional overcurrent relays. Neural Comput Appl 32:8561–8583
Ezzeddine M, Kaczmarek R, Iftikhar M (2011) Coordination of directional overcurrent relays using a novel method to select their settings. IET Gener Transm Distrib 5:743–750
Singh M, Panigrahi B, Abhyankar A (2013) Optimal coordination of directional over-current relays using teaching learning-based optimization (TLBO) algorithm. Int J Electr Power Energy Syst 50:33–41
Rajput VN, Pandya KS (2017) Coordination of directional overcurrent relays in the interconnected power systems using effective tuning of harmony search algorithm. Sustain Comput Inf Syst 15:1–15
Amraee T (2012) Coordination of directional overcurrent relays using seeker algorithm. IEEE Trans Power Deliv 27:1415–1422
Al-Roomi AR, El-Hawary ME (2016) Optimal coordination of directional overcurrent relays using hybrid BBO/DE technique and considering double primary relays strategy. In: Electrical power and energy conference (EPEC), IEEE, pp 1–7
Bouchekara H, Zellagui M, Abido MA (2017) Optimal coordination of directional overcurrent relays using a modified electromagnetic field optimization technique. Appl Soft Comput 54:267–283
Singh DK, Gupta S (2012) Use of genetic algorithms (GA) for optimal coordination of directional over current relays. In: Engineering and systems (SCES), pp 1–5
Rivas AEL, Pareja LAG (2017) Coordination of directional overcurrent relays that uses an ant colony optimization algorithm for mixed-variable optimization problems’, In: Environment and electrical engineering industrial and commercial power systems Europe (EEEIC/I&CPS Europe), IEEE international conference, pp 1–6
Shih MY et al (2014) On-line coordination of directional overcurrent relays: performance evaluation among optimization algorithms. Electr Power Syst Res 110:122–132
Korashy A, Kamel S, Youssef A-R, Jurado F (2018) Evaporation rate water cycle technique for optimal coordination of direction overcurrent relays. In: 2018 twentieth international middle east power systems conference (MEPCON), pp 643-648
Zeineldin H, El-Saadany E, Salama M (2006) Optimal coordination of overcurrent relays using a modified particle swarm optimization. Electr Power Syst Res 76:988–995
Perez LG, Urdaneta AJ (2001) Optimal computation of distance relays second zone timing in a mixed protection scheme with directional overcurrent relays. IEEE Trans Power Deliv 16:385–388
Abdelhamid M, Houssein EH, Mahdy MA, Selim A, Kamel S (2022) An improved seagull optimization algorithm for optimal coordination of distance and directional over-current relays. Expert Syst Appl 200:116931
Abdelhamid M, Kamel S, Ahmed EM, Agyekum EB (2022) An adaptive protection scheme based on a modified heap-based optimizer for distance and directional overcurrent relays coordination in distribution systems. Mathematics 10:419
Singh M, Telukunta V, Srivani S (2018) Enhanced real time coordination of distance and user defined over current relays. Int J Electr Power Energy Syst 98:430–441
Poli R, Kennedy J, Blackwell T (2007) Particle swarm optimization. Swarm Intell 1:33–57
Schoenauer M, Xanthakis S (1993) Constrained GA optimization. In: Proceedings of the 5th international conference on genetic algorithms, pp 573–580
Mirjalili S, Mirjalili SM, Lewis A (2014) Grey wolf optimizer. Adv Eng Softw 69:46–61
Rao RV, Savsani VJ, Vakharia D (2011) Teaching–learning-based optimization: a novel method for constrained mechanical design optimization problems. Comput Aided Des 43:303–315
Faramarzi A, Heidarinejad M, Mirjalili S, Gandomi AH (2020) Marine Predators Algorithm: A nature-inspired metaheuristic. Expert Syst Appl 152:113377
Karami H, Anaraki MV, Farzin S, Mirjalili S (2021) Flow Direction Algorithm (FDA): a novel optimization approach for solving optimization problems. Comput Ind Eng 156:107224
Abdollahzadeh B, Gharehchopogh FS, Mirjalili S (2021) African vultures optimization algorithm: a new nature-inspired metaheuristic algorithm for global optimization problems. Comput Ind Eng 158:107408
Abdollahzadeh B, Gharehchopogh FS, Mirjalili S (2021) Artificial gorilla troops optimizer: a new nature-inspired metaheuristic algorithm for global optimization problems. Int J Intell Syst 36:5887–5958
Schmieg M (1985) DIgsilent power factory V14. [online]. Available: http://www.digsilent.de
Chelliah TR, Thangaraj R, Allamsetty S, Pant M (2014) Coordination of directional overcurrent relays using opposition based chaotic differential evolution algorithm. Int J Electr Power Energy Syst 55:341–350
Funding
Funding for open access publishing: Universidad de Jaén/CBUA.
Author information
Authors and Affiliations
Contributions
AK: Conceived and designed the analysis, Contributed data or analysis tools, Wrote the paper, SK: Collected the data, Contributed data or analysis tools, Performed the analysis, FJ: Contributed data or analysis tools, Performed the analysis, Wrote the paper.
Corresponding author
Ethics declarations
Conflict of interest
There is not a Conflict of Interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Korashy, A., Kamel, S. & Jurado, F. Optimal coordination of directional overcurrent relays and distance relays using different optimization algorithms. Electr Eng 105, 2935–2947 (2023). https://doi.org/10.1007/s00202-023-01869-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00202-023-01869-5