
Abstract
In this paper, different methods are utilized to solve the coordination issue involving directional overcurrent relays (DOCRs) and distance relays. The proper coordination of DOCRs and distance relays is a critical issue for system security in electrical networks. Finding the DOCRs setting, pickup current(Ip) and timed dial setting (TDS), and operating time for zone-2 of distance relays is the primary objective of solving the coordination problem. The constant parameters A & B of the directional overcurrent relay that are responsible to control the form of the relay´s characteristics as well as the Ip and TDS have been regarded as variables in this problem. The optimal value for these four DOCR settings has been determined using different optimization techniques. The primary and backup relays must operate sequentially and without any violations, and this must be guaranteed by optimization techniques. In order to determine the operation time for zone-2 and DOCRs setting, optimization methods are examined utilizing the 8-bus and IEEE 30-bus networks. Different optimization algorithms, including recent and traditional techniques, are compared. The obtained results show the superiority of the genetic algorithm (GA) in solving the coordination problem of distance relays and DOCRs. Also, the obtained results prove the ability of the GA method compared to the particle swarm algorithm (PSO), grey wolf optimization (GWO), water cycle technique (WCA), equilibrium optimizer (EO), African vultures optimization algorithm (AVOA), flow direction algorithm (FDA), and gorilla troops optimizer (GTO) techniques.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 1. Introduction
The complexity of the electrical network's operation is growing rapidly as the scale of the electric network is rapidly growing [1]. The primary objective of protective relays is to keep the electric network secure by isolating the problem section and keeping healthy parts operational [2]. The sub-transmission and transmission lines set the backbone of the electrical network. Transmission and sub-transmission lines are generally protected by DOCRs and distance relays [3]. The first zone, zone-1, for distance relays is regarded as the primary protection and is designed to the protected transmission line and isolate faults located on 80–90% of the length of the transmission line. Zone-1 shall clear faults instantaneously without any time delay. The second zone, zone-2, of distance relays is regarded as backup protection [4]. This zone is established to protect the remaining transmission line and provide a suitable safety margin. To maintain the security of the power network, coordination between DOCRS and distance relays must occur simultaneously. This goal can be met by finding suitable DOCR settings and optimal operating time for zone-2. Numerous boundaries are present in the coordination problem between distance relays and DOCRs, which is considered to be a nonlinear optimization problem [5, 6]. The main relays must quickly clear the problem in order to limit the outage of the electric network to the smallest zones. After the coordination time interval (CTI), which is required in the event of main relay failure, backup relays are required to isolate the defective section [7, 8].
Various research studies have proposed several techniques, such as teaching learning-based optimization (TLBO) [9], grey wolf optimization (GWO) [10], Particle swarm optimization (PSO) [11], Seeker algorithm [12], Modified Water Cycle Technique (MWCA) [2], Evaporation Rate Water Cycle Technique [13], Ant colony optimization (ACO) [14], Modified Electromagnetic Field Optimization (MEFO) [15], genetic algorithm (GA) [16], Elite marine predators algorithm [17], GTO algorithm [18], Harris Hawks Optimization [19], Numerical Iterative Method [20], analytical and swarm algorithms [21], and cuckoo search optimization algorithm [22]. These techniques have been proposed and utilized to address the coordination problem in Directional Overcurrent Relays (DOCRs), particularly in the protection of transmission lines and sub-transmission lines.
Few studies have focused on finding solutions to the coordination issue between DOCRs in a combined protection system with distance relays, while the majority of the papers mentioned above give methods for finding solutions to the coordination issue for just DOCRs. Transmission lines are protected using both distance relays and DOCRs [4]. The coordination issue between distance relays and DOCRs was solved in [23] using the modified seagull optimization technique (ISOA). The coordination problem of distance relays and DOCRs has been addressed in [10] using the ant colony optimization algorithm (ACO) and ACO-LP algorithm. The use of GA and human behavior-based optimization (HBBO) to solve the coordination problem for combined DOCRs and distance relays has been proposed [5]. Dual time current characteristics for DOCR relays are taken into consideration for solving the coordination problem for DOCRs and distance relays [24]. The coordination problem has been solved in [25] using the modified African vultures optimization algorithm (MAVOA). The coordination issue for the combined DOCRs and distance relays has been addressed in [6] with the multiple embedded cross-over particle swarm optimisation (MEPSO) approaches. The LP method has also been used to address coordination issues in [26], where the operational time zone-2 had been set to fixed settings. The coordination issue for the combined distance relays and DOCRs has been addressed using a modified heap-based optimizer (MHBO) [27]. An adaptive protection scheme to solve the coordination problem of DOCRs and distance relays has been proposed using a Honey Badger algorithm (HBA) [28]. Solving the coordination problem of duel setting for DOCRs and distance relays using PSO and GWO [29]. The coordination problem has been solved in [30] using the hybrid GSA-SQP. The coordination problem in active Distribution Networks between distance relays and DOCRs was solved in [31] using the tunicate swarm algorithm.
In this research, distance relays and DOCRs are coordinated as a combined protection scheme. Various techniques are suggested to solve the distance relays and DOCRs nonlinear coordination issue. To obtain the optimal settings that solve the coordination of DOCRs in a combined protection scheme with distance relays, the PSO, GA, WCA, GWO, Equilibrium Optimizer (EO), African Vultures Optimization Algorithm (AVOA), Flow Direction Algorithm (FDA), and Gorilla Troops Optimizer (GTO) techniques are presented. In this paper, the DOCR non-standard characteristics curve is considered. In this paper, a non-standard DOCR characteristics curve is considered. Two parameters are added to the conventional (Ip and TDS) relay settings. These parameters are A and B, and the values of these parameters are based on the properties of the DOCRs. Four DOCRs settings (Ipu, TDS, A, and B) are optimized using different optimization algorithms. The main objective of finding a solution for the coordination issue is to reduce the total operating time for zone-2 and the total operating time for primary DOCRs. Faults at various fault locations are considered to ensure the discrimination between primary and backup relays along the length of the protected transmission lines. The proposed algorithms' viability is evaluated using 8-bus networks. Recent algorithms and well-known algorithms are compared. The results show the effectiveness of the proposed algorithms in reducing the operating times of DOCRs and zone-2. The result also shows that the suggested algorithms maintain sequential operation between relay pairs. The main contributions of this paper can be summarized as follows:
-
Eight optimization algorithms have been applied to solve the coordination issue of DOCRs and distance relays.
-
Using the GA, PSO, WCA, GWO, EO, FDA, AVOA, and GTO, the non-standard DOCR characteristics curves have been assessed in the coordination problem solution.
-
The suggested algorithms have been evaluated using 8-bus and IEEE 30-bus networks;
-
The obtained results show the ability of the proposed techniques to find optimal relay settings and to solve the coordination problem between the DOCRs and distance relays.
-
The GA technique gives better results compared to the PSO, WCA, GWO, EO, FDA, AVOA, and GTO techniques.
-
The suggested optimization algorithms have been compared with other published techniques in solving the coordination problem between DOCRs and distance relays.
-
The obtained results using GA are better than the result obtained by other published optimization algorithms.
2 Problem formulation
A transmission line has protective relays with distance relay and DOCRs functionalities installed at both ends to safeguard the electrical network. A non-linear optimization problem with numerous constraints is used to formulate the combined DOCRs and distance relay [2]. The preservation of the stability of the power system is the primary goal of trying to solve the coordination issue of combination distance relays and DOCRs. In order to minimize the overall operating times for zone-2 of distance relays and all DOCRs (main) relays and maintain the discrimination between relay pairs, it is necessary to obtain the optimal TDS and Ip for DOCRs and operating time for zone-2 of distance relays [32]. Coordination for combined distance relays and DOCRs is regarded as a constraint problem. The fitness function for the coordination problem can be written as [5]:
where l is the number of relays, Tmain is the main relay's operating time, TZone-2 is the zone-2 operating time [5]. According to IEC-60225, a non-linear equation can be used to determine the DOCR's operating time and this equation can be written as [33]:
where A and B are constant values and depending on the DOCRs characteristic, the CTratio is the current transformer ratio, and If is the fault current [10]. Under two types of constraints—relay characteristics limitations and coordination limitations objective function in (1) should be accomplished.
2.1 Limitations on the DOCRs
Four settings decide the operating time for each DOCR. The upper and lower limits for each setting are expressed as [34]:
where IpU is the upper limit for Ip and IpL is the lower limit for Ip, PsU is the upper limit for Ps and PsL is the lower limit for PS [13]-[34]. TDSL and TDSU are the lower & upper limits for TDS settings [3]. The AL and AU represent the upper & lower limits of the constant range for the DOCR characteristics, respectively, while the BL and BU represent the lower and upper ranges of the constant B for the DOCR characteristics [34].
2.2 Constraint on Zone-2 operating time
Distance relays' zone-1 is designed to identify faults on 80–90% of the protected line. For zone 1, the action must be taken immediately and without delay [4]. The primary responsibility of the second zone-2 is to protect the remaining line and to leave enough margin of error. The restriction on the zone-2 distance relays' operation time can be stated as follows [5]:
where Tzone-2U and Tzone-2L are the upper and lower range for the minimum zone-2 operating time, respectively.
2.3 Coordination constraints
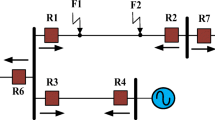
Primary and backup relays detect the fault simultaneously. The coordination time delay is needed to keep the area segregated between relay pairs, where the backup relays must initiate after a time delay, in order to avoid the undesired tripping of protection relays [2]. To meet the criterion for selectivity, backup protection must be operated in the event of the main relay failed to operate. Both DOCRs and distance relays can act as primary or backup relays. Relay-B is the backup relay for Relay-A, the main relay, as shown in Fig. 1. In order to maintain system stability, coordination should maintain between primary distance relay to backup DOCRs, primary DOCRs to backup DOCRs, and primary DOCRs to backup distance relay [5, 27]. For the coordination of combined distance relays to DOCRs, four fault locations are taken into account in this paper as shown in Fig. 1. At the near end and the far end of the protected line fault1 and fault4 are applied, respectively. Fault 3 is applied in the middle of the protected line, while Fault 2 is applied close to the near end of the protected line. The primary DOCRs must isolate the fault if it occurs in fault1. If the primary relay failed to operate as shown in Fig. 1, the backup relay DOCR shall clear the fault after the desired CTI. This restriction will be expressed as inequality and formulated as follows:

Coordination between main and backup relays
For fault1, TBackup is the operating time of the backup DOCR and TMain is the operating time of the main DOCRs. According to Fig. 1, the CTI1 is the delay time between the backup and primary DOCRs. Similar to this, coordination between the primary and backup relays is also kept between DOCR and the distance relay. The following will be a description of this boundary:
TZone-2 is the operating time of backup distance relay zone-2 at fault1. The CTI2 is the time difference between the primary DOCR and the backup distance relay. When a fault occurs in fault 2, the primary distance relay zone-1 must immediately clear the fault.
For fault 2, in the event that the primary protection distance relay failed to activate as presented in Fig. 1, backup DOCRs must isolate the fault after a specified period. This limitation can be written as follows:
where TZone-1 represents the zone-1 of distance relay operating time and TBackup represents the backup DOCR operating times for fault at fault 2. The CTI3 is, as shown in Fig. 1, the time margin between the primary distance relay and backup DOCRs and the.
The primary DOCRs must isolate the fault if it occurs in fault 3. If the primary relay failed to work, the backup relay DOCR shall clear the fault after the desired CTI1. This limitation can be formulated as follows:
The operating times for the backup and main DOCRs for fault at location 3 are TMain (F3) and TBackup (F3), respectively.
In the event that a fault occurs in location 4, the backup distance relay zone-2 shall isolate the fault after a specified time delay, CTI2, in the event that the primary DOCRs failed to operate, this boundary can be described as follows:
where TMain (Fault 4) represents the operating times for primary DOCRs for fault at location 4, as shown in Fig. 1, and TZone-2 (Fault 4) represents the backup distance relay zone-2 operating time. The range of the CTI value is from 0.2 to 0.5 s [13].
The penalty function is applied to handle the non-linear optimization problem. In order to penalize the unfeasible solutions a penalty term is added to the objective function. In [35], a comprehensive survey of the most common penalty functions is provided.
3. Proposed Optimization Algorithm.
-
1.
WCA
WCA is based on the observation of the water cycle process and is inspired by nature. The water cycle involves evaporating water being lifted into the atmosphere and returning to the earth as rain [27]. The WCA starts with the initial raindrops, which are initiated at random between the lower and upper of decision variables. The best raindrop with the lowest objective function is selected to represent the sea, and the good raindrops are selected to represent the river. The remaining raindrops are then selected to form streams [36].
-
2.
PSO
The PSO is a population-based optimization technique. This technique is based on the swarm theory, it simulates the cooperative and social behaviour of animals such as fish schooling when hunting and navigating to meet their needs. PSO initialized practical random elements. These particles move through the problem space while following the optimal particles. The particle adjusts its position based on its own experience and the experiences of adjacent particles [37].
-
3.
GWO
The GWO imitates the natural leadership hunting strategy of grey wolves. Wolves will surround and attack their prey during a hunt. The top three wolves are more familiar with the location of the prey. Based on these three wolves, the remaining wolves adjust their positions [38].
-
4.
GA
The GA mimics Darwinian principles and is based on the natural selection of genes [13,14,15]. Chromosomes are the initial solutions generated by GA. In the chromosome, genes are encoded. Genetic crossover and mutation principles are utilized in every iteration. The genes are evaluated and chosen based on the fitness value, and a new population is generated. The entire cycle is repeated in an effort to get the best solution [16].
-
5.
EO
The EO comes from mass balance models based on physics that predict equilibrium and dynamic states. Every solution is regarded as a particle, and a solution's location is regarded as a concentration. The agents modify their positions in consideration of potential candidates for equilibrium [39]. There are four best answers during the entire optimization process, and the average of these four candidate solutions is determined. While the four candidate solutions enable the algorithm to have a higher ability in the exploration phase, the average helps the algorithm in exploitation. The equilibrium pool is a vector made up of the five candidate particles. The equilibrium state needed for the best solution is represented by the EO's final convergence state [39].
-
6.
GTO
The GTO simulates gorillas' daily activities, including resting, moving about, eating, and taking during the day. The gorilla tracking organisation (GTO) is based on the group behaviours of gorillas, which show a variety of behaviours that are imitated, such as migration to an unknown area, migration to another gorilla, migration in the direction of a predetermined site, following the silverback, and competing for adult females [40].
-
7.
FDA
The FDA is one of the population-based techniques. FDA mimics the flow path to the drainage basin exit point with the smallest height. In other words, the flow tends to go to the neighbour with the highest low or the best goal function. The amount of rain that falls but did not absorb into the soil is known as the excess or effective rainfall in a drainage basin. The amount of water that stays on the ground surface after rainfall and losses such as interception, evaporation and transpiration and infiltration is known as direct runoff [41].
-
8.
AVOVA
The AVOA simulates the foraging and navigational patterns of African vultures in the wild. The objective function of each solution is determined by the AVOA. Divide the vultures into two groups, with the best solutions being the best vultures and the other solutions trying to follow the best vultures. The worst solution is seen as the weakest. The vultures make an effort to follow the best solution and keep away from the worst course solution [42].
3 Results and discussion
Different optimization algorithms are applied to find the optimal solution to the coordination problem of non-standard characteristic DOCRs characteristics and distance relays. The optimization algorithms shall minimize the total Tzone-2 of distance relays and operating time of DOCRs. The optimization algorithms are assessed by solving the coordination problem of the 8-bus network. In this article, the CTI is set to 0.2 s and the lower and upper boundary for Tzone-2 are 0.2 and 0.9 s, respectively. While the boundary ranges for TDS are 0.05 and 1.1 [23]. The upper and lower boundaries for DOCRs characteristic are taken as αmax and αmin are 120 and 0.14, respectively, and βmax and βmin are 2 and 1, respectively [34]. For a fair comparison between different optimizers, the maximum iteration for each tested algorithm in each test case is set to be equal to 500 iterations. While the number of populations for each optimization is set to be 100. The different critical fault locations are applied as shown in Fig. 1. The tested optimization techniques are applied in the MATLAB software using 3.1 GHz PC with 8 GB of RAM.
3.1 The 8-bus test system
The tested optimization algorithms are assessed on the 8-bus network. The single-line diagram for this network is shown in Fig. 2. The 8-bus network consists of 7 lines, 2 transformers, and 2 generators. There are 14 distance and DOCRs installed on the end of transmission lines. The details of the 8-bus network are given in [15, 23].

Single line diagram for the 8-bus network
The DOCRs settings and operating time for zone-2 using different techniques are shown in Tables 1, 2, 3 and 4. These tables show that the PSO algorithm finds the operating time for zone-2 distance relays and four settings for DOCRs that are superior to those gotten by other algorithms.
Tables 5 and 6 provide the operation times for the primary and backup DOCRs and time margins using different optimization approaches. In these tables, it is clear that in the case of a primary relay failure, the backup relays will initiate after a specified margin. It may be stated that the suggested algorithms keep relay pairs operating sequentially where the coordination margin is exceeded by the time delay between relay pairs.
Tables 7, 8 and 9 present the time difference between relay pairs at various fault locations using different optimization techniques. These tables show that the obtained CTIs at the different fault locations exceed the prescribed margin without any violations. That indicates that along protected transmission lines, the suggested method maintains coordination between the primary and backup relays. As shown in Table 7, the time margin at Fault 3 between the primary relay (relay 7) and backup relays (relay 5 and relay 13) using PSO are 50 s and 50 s. The time margin at Fault 3 between the primary relay (relay 14) and backup relays (relay 1 and relay 9) using PSO are 50 s and 50 s, respectively. So in these cases, if primary relays fail to operate there is a long time delay for backup relays to operate. Additionally, the time margin at Fault 3 between the primary relay (relay 7) and backup relays (relay 5 and relay 13) using GA are 99 s and 99 s. The time margins at Fault 3 between the primary relay (relay 14) and backup relays (relay 1 and relay 9) using GA are 99 s and 99 s. So in these cases, if primary relays fail to operate there is a long time delay for backup relays to operate.
As shown in Table 8, the time margin at Fault 3 between the primary relay (relay 7) and backup relays (relay 5 and relay 13) using WCA are 50 s and 50 s. The time margin at Fault 3 between the primary relay (relay 14) and backup relays (relay 1 and relay 9) using WCA are 50 s and 50 s. So in these cases, if primary relays fail to operate there is a long time delay for backup relays to operate. Additionally, the time margin at Fault 3 between the primary relay (relay 7) and backup relays (relay 5 and relay 13) using GWO are 50 s and 50 s, respectively. The time margins at Fault 3 between the primary relay (relay 14) and backup relays (relay 1 and relay 9) using GWO are 50 s and 50 s, respectively. So in these cases, if primary relays fail to operate there is a long time delay for backup relays to operate.
Tables 10, 11 and 12 present the time difference between relay pairs utilising recent optimization techniques at various fault locations. These tables show that the obtained CTIs at different locations exceed the specified margin without any violations. That indicates the suggested methods succeed to keep the coordination between the relay pairs. It is clear from Tables 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 and 12 that the suggested optimization techniques met all DOCRs and distance relay settings boundaries and keep the discrimination between primary and backup relays at various fault locations. As shown in Table 10, the time margin at Fault 3 between the primary relay (relay 7) and backup relays (relay 5 and relay 13) using EO are 50 s and 50 s, respectively. The time margin at Fault 3 between the primary relay (relay 14) and backup relays (relay 1 and relay 9) using EO are 50 s and 50 s, respectively. So in these cases, if primary relays fail to operate there is a long time delay for backup relays to operate. Additionally, the time margin at Fault 3 between the primary relay (relay 7) and backup relays (relay 5) using AVOA are 50 s. The time margins at Fault 3 between the primary relay (relay 14) and backup relays (relay 1 and relay 9) using AVOA are 50 s and 50 s, respectively. So in these cases, if primary relays fail to operate there is a long time delay for backup relays to operate.
As shown in Table 11, the time margin at Fault 3 between the primary relay (relay 7) and backup relays (relay 5 and relay 13) using FDA is 50 s and 50 s, respectively. The time margin at Fault 3 between the primary relay (relay 8) and backup relays (relay 9) using FDA is 50 s. The time margin at Fault 3 between the primary relay (relay 14) and backup relays (relay 1 and relay 9) using FDA is 50 s and 50 s, respectively. So in these cases, if primary relays fail to operate there is a long time delay for backup relays to operate. Additionally, the time margin at Fault 3 between the primary relay (relay 7) and backup relays (relay 5) using GTO is 50 s. The time margin at Fault 3 between the primary relay (relay 8) and backup relays (relay 9) using GTO is 50 s. The time margins at Fault 3 between the primary relay (relay 14) and backup relays (relay 1 and relay 9) using GTO are 50 s and 50 s, respectively. So in these cases, if primary relays fail to operate there is a long time delay for backup relays to operate.
Figure 3 presents the suggested algorithms' goal function. As seen in this figure, the PSO method outperformed other optimization algorithms in terms of obtaining the optimal four DOCRs and operating time for distance relays zone-2 and achieving better convergence. Whereas PSO's (9.84 s) objective function value is lower than that of the other optimization methods. Table 13 compares different optimization techniques with other published algorithms for overcoming the coordination problem of DOCRs in combination with distance relays. Based on the result from this table, it can be shown that the total operating times of DOCRs and the total operating zone-2 of distance relays using the GA algorithm is less than those obtained using other optimization techniques.

Objective function of the different algorithms of the 8-bus system
Table 14 presents a statistical analysis of the results obtained through different optimization techniques. This table presents the mean, worst, best, and values of the objective function with its standard deviation achieved by GA, PSO, GWO, WCA, EO, GTO, FDA, and AVOA. The number of individual runs for each optimization technique is 15. As shown in Table 14 that the standard deviation for the GA (0.42) is lower than other tested optimization techniques, which indicates the effectiveness of the GA technique to solve the coordination problem between DOCRS and distance relays.
3.2 The IEE 30-bus test system
The tested optimization techniques are evaluated on the IEEE 30-bus network. The single-line diagram for this system is presented in Fig. 4. There are 38 distance and DOCRs installed on the end of transmission lines. The details of the IEEE 30-bus network are given in [34, 43].

Single line diagram of the IEEE 30-bus network
The operating time for zone-2 and DOCR settings using well-known and recent optimization algorithms are presented in Tables 15, 16, 17 and 18. From these tables, it can be noticed that the suggested techniques succeed to get the optimal operating time for zone-2 distance relays and four settings for DOCRs within limit ranges of A, B, \(\mathrm{Ip}\) Ip, TDS, and operating time of zone-2. The OF (24.32 s) that has been gotten by the GA algorithm is better than the OF produced by other optimization techniques, as can be shown in Table 15. Tables 19 and 20 provide the operation times for the primary and backup DOCRs and time margins using different optimization algorithms. In these tables, it is clear that in the case of a main relay fail to operate, the backup relays will initiate after a specified margin. It may be stated that the suggested techniques succeed to keep sequential operation between relay pairs where the coordination margin is exceeded by the specified time delay.
Tables 21, 22 and 23 present the time difference between primary and backup relay pairs at different fault locations using well-known algorithms. These tables show that the obtained time difference between relay pairs at the different fault locations exceeds the specified time margin without any violations between primary and backup relays. That indicates that along protected transmission lines, the tested algorithms maintain coordination between the relay pairs.
As shown in Table 21, the time margins at Fault 3 between the primary relay (relay 10) and backup relays (relay 21 and relay 28) using PSO are 99 s and 99 s, respectively. The time margin at Fault 3 between the primary relay (relay 16) and backup relay (relay 36) using PSO is 99 s. The time margin at Fault 3 between the primary relay (relay 35) and backup relay (relay 17) using PSO is 99 s. It is noticed in theses cases there is a long time between the operating time for mentioned backup relays and primary relays when the primary relay fails to operate. Additionally, the time margins at Fault 3 between the primary relay (relay 10) and backup relays (relay 22, relay 21 and relay 28) using GA are 99 s, 99 s and 99 s, respectively. The time margin at Fault 3 between the primary relay (relay 16) and backup relay (relay 36) using GA is 99 s. The time margin at Fault 3 between the primary relay (relay 35) and backup relay (relay 17) using GA is 99 s. It can be observed in these cases that there is a long time between the operating time for mentioned backup relays and primary relays if the primary relay fails to operate.
As shown in Table 22, the time margin at Fault 3 between the primary relay (relay 10) and backup relay (relay 28) using WCA is 99 s. The time margin at Fault 3 between the primary relay (relay 16) and backup relay (relay 36) using WCA is 99.7 s. The time margin at Fault 3 between the primary relay (relay 19) and backup relay (relay 17) using WCA is 99.8 s. The time margin at Fault 3 between the primary relay (relay 24) and backup relay (relay 25) using WCA is 99 s. The time margin at Fault 3 between the primary relay (relay 34) and backup relay (relay 17) using WCA is 99 s. The time margin at Fault 3 between the primary relay (relay 35) and backup relay (relay 17) using WCA is 99 s. It can be noticed in theses cases there is a long time between the operating time for mentioned backup relays and primary relays when the primary relay fails to operate. Additionally, the time margins at Fault 3 between the primary relay (relay 10) and backup relays (relay 21 and relay 28) using GWO are 99 s and 99 s. The time margin at Fault 3 between the primary relay (relay 16) and backup relays (relay 36) using GWO is 99 s. The time margin at Fault 3 between the primary relay (relay 33) and backup relay (relay 36) using GWO is 99 s. The time margin at Fault 3 between the primary relay (relay 35) and backup relay (relay 17) using GWO is 99 s. It can be observed in these cases that there is a long time between the operating time for mentioned backup relays and primary relays when the primary relay fails to operate.
Tables 24, 25 and 26 present the time difference between primary and backup relay pairs using recent optimization algorithms. It is clear from these tables that the obtained CTIs at different fault locations exceed the predetermined time margin without any mis-coordination between relay pairs. These tables indicate that the primary relays will operate first to isolate the faults and the backup relays will imitate after a time delay to isolate faults if the primary relays fail to operate. That shows the recent optimization techniques succeed to preserve the sequential operation between the relay pairs. It is clear from Tables 24, 25 and 26 that the suggested optimization techniques met all DOCRs and distance relay settings constraints and maintain the discrimination between relay pairs at different fault locations. As shown in Table 24, the time margin at Fault 3 between the primary relay (relay 9) and backup relay (relay 21) using EO is 99.5 s. The time margin at Fault 3 between the primary relay (relay 10) and backup relays (relay 20 and relay 21) using EO are 99 s and 99 s. The time margin at Fault 3 between the primary relay (relay 16) and backup relay (relay 36) using EO is 99.7 s. The time margin at Fault 3 between the primary relay (relay 19) and backup relay (relay 17) using EO is 43.9 s. The time margin at Fault 3 between the primary relay (relay 34) and backup relay (relay 17) using EO is 99 s. The time margin at Fault 3 between the primary relay (relay 35) and backup relay (relay 17) using EO is 99 s. It can be noticed in these cases there is a long time between the operating time for mentioned backup relays and primary relays. Additionally, The time margin at Fault 3 between the primary relay (relay 10) and backup relays (relay 20 and relay 21) using AVOA are 99 s and 99 s. The time margin at Fault 3 between the primary relay (relay 16) and backup relay (relay 36) using AVOA is 99.4 s. The time margin at Fault 3 between the primary relay (relay 19) and backup relay (relay 17) using AVOA is 99.5 s. The time margin at Fault 3 between the primary relay (relay 34) and backup relays (relay 17) using AVOA is 99 s. The time margin at Fault 3 between the primary relay (relay 35) and backup relay (relay 17) using AVOA is 99.5 s. It can be observed in these cases there is a long time between the operating time for mentioned backup relays and primary relays.
As shown in Table 25, the time margin at Fault 3 between the primary relay (relay 9) and backup relays (relay 21) using FDA is 99.7 s. The time margin at Fault 3 between the primary relay (relay 10) and backup relay (relay 21) using FDA are 99 s. The time margin at Fault 3 between the primary relay (relay 16) and backup relays (relay 36) using FDA is 99 s. The time margin at Fault 3 between the primary relay (relay 19) and backup relay (relay 17) using FDA is 99 s. The time margin at Fault 3 between the primary relay (relay 26) and backup relay (relay 8) using FDA is 99.7 s. The time margin at Fault 3 between the primary relay (relay 34) and backup relay (relay 17) using FDA is 99 s. The time margin at Fault 3 between the primary relay (relay 35) and backup relay (relay 17) using FDA is 99 s. It can be noticed in these cases there is a long time between the operating time for mentioned backup relays and primary relays. Additionally, the time margin at Fault 3 between the primary relay (relay 9) and backup relays (relay 21) using FDA is 99.7 s. The time margin at Fault 3 between the primary relay (relay 10) and backup relays (relay 20, relay 21, and relay 28) using GTO are 99 s, 99 s and 99 s. The time margin at Fault 3 between the primary relay (relay 19) and backup relay (relay 17) using GTO is 99 s. The time margin at Fault 3 between the primary relay (relay 34) and backup relays (relay 17) using GTO is 99 s. The time margins at Fault 3 between the primary relay (relay 35) and backup relay (relay 17) using GTO is 99.5 s. It can be observed in these cases there is a long time between operating time for mentioned backup relays and primary relays.
The OF of the tested optimization algorithms is shown in Fig. 5. As seen in this figure, the GA succeed to find optimal relay settings and achieving better convergence. Whereas the OF value using the GA technique reached 24.32 s, as opposed to the OF values, obtained using other optimization algorithms

Objective function of the different algorithms of the IEEE 30-bus system
The comparison between well-known and recent optimization algorithms for solving the coordination problem of DOCRs in combination with distance relays are given in Table 27. Based on the result from this table, it is obvious that the total operating times of DOCRs and the total operating zone-2 of distance relays using the GA algorithm is less than those obtained using other tested algorithms. This shows the effectiveness of the proposed GA in solving the complicated coordination problem of DOCRs and distance relays simultaneously.
4 Conclusion
The complicated nonlinear coordination problem for the DOCRs and distance relay combination has been solved in this study using different techniques. The coordination issue has been solved using the PSO, GA, WCA, GWO, EO, AVOA, FDA, and GTO algorithms. The primary goal of finding a solution to the coordination issue was to reduce the total operating time of DOCRs and zone-2 for distance relays. A system of 8-bus and IEEE 30-bus networks have been used to assess the performance of various algorithms. The comparison of current and well-known algorithms has been performed to prove the most effective competing techniques. Comparing the proposed techniques has been accomplished to show the proposed technique's effectiveness for use with this kind of problem. The findings indicate that the GA is capable of determining the operating time for zone 2 of distance relays and the settings of DOCRs that offer the most optimal global solution. Additionally, the GA is able to maintain the selectivity between relay pairs successfully. The obtained results from GA outperformed those results from other optimization techniques, in terms of the statistical evaluation and objective function value. Furthermore, the suggested algorithms have been compared against other techniques. The results obtained show that the GA is capable of obtaining a comprehensive, promising solution for all DOCR settings and the operating time for zone-2.
Availability of data and materials
Data sharing is not applicable to this article as no datasets were generated or analysed during the current study.
References
Korashy S, Kamel FJ, Youssef A-R (2019) Hybrid whale optimization algorithm and grey wolf optimizer algorithm for optimal coordination of direction overcurrent relays. Electr Power Compon Syst 47:644–658
Korashy S, Kamel A-RY, Jurado F (2019) Modified water cycle technique for optimal direction overcurrent relays coordination. Appl Soft Comput 74:10–25
Ahmadi S-A, Karami H, Gharehpetian B (2017) Comprehensive coordination of combined directional overcurrent and distance relays considering miscoordination reduction. Int J Electr Power Energy Syst 92:42–52
Moravej Z, Jazaeri M, Gholamzadeh M (2012) Optimal coordination of distance and over-current relays in series compensated systems based on MAPSO. Energy Convers Manage 56:140–151
Rivas AEL, Pareja LAG, Abrão T (2019) Coordination of distance and directional overcurrent relays using an extended continuous domain ACO algorithm and an hybrid ACO algorithm. Electr Power Syst Res 170:259–272
Farzinfar M, Jazaeri M, Razavi F (2014) A new approach for optimal coordination of distance and directional over-current relays using multiple embedded crossover PSO. Int J Electr Power Energy Syst 61:620–628
Moravej Z, Mohaghegh Ardebili H (2018) A new objective function for adaptive distance and directional over-current relays coordination. Int Trans Electr Energy Syst 28:2592
Ezzeddine M, Kaczmarek R, Iftikhar M (2011) Coordination of directional overcurrent relays using a novel method to select their settings. IET Gener Transm Distrib 5:743–750
Kalage AA and Bhuskade A (2018) optimum coordination of directional overcurrent relays using advanced teaching learning based optimization algorithm. In: 2018 IEEE Global Conference on Wireless Computing and Networking (GCWCN), 2018, pp 187-191
Korashy A, Kamel S, Youssef A-R, and Jurado F (2018) Solving optimal coordination of direction overcurrent relays problem using grey wolf optimization (GWO) algorithm. In: 2018 Twentieth International Middle East Power Systems Conference (MEPCON), 2018, pp 621-625
Rathinam A, Sattianadan D, Vijayakumar K (2010) Optimal coordination of directional overcurrent relays using particle swarm optimization technique. Int J Comput Appl 10:43–47
Amraee T (2012) Coordination of directional overcurrent relays using seeker algorithm. IEEE Trans Power Deliv 27:1415–1422
Korashy A, Kamel S, Houssein EH, Jurado F, Hashim FA (2021) Development and application of evaporation rate water cycle algorithm for optimal coordination of directional overcurrent relays. Expert Syst Appl 185:115538
Rivas AEL and Pareja LAG (2017) Coordination of directional overcurrent relays that uses an ant colony optimization algorithm for mixed-variable optimization problems. Environment and Electrical Engineering Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), IEEE International Conference, 2017, pp 1–6
Bouchekara H, Zellagui M, Abido MA (2017) Optimal coordination of directional overcurrent relays using a modified electromagnetic field optimization technique. Appl Soft Comput 54:267–283
Singh DK and Gupta S (2012) Use of genetic algorithms (GA) for optimal coordination of directional over current relays. In: 2012 Students Conference on Engineering and Systems, 2012, pp 1-5
Merabet O, Bouchahdane M, Belmadani H, Kheldoun A, Eltom A (2023) Optimal coordination of directional overcurrent relays in complex networks using the Elite marine predators algorithm. Electr Power Syst Res 221:109446
Oussama M, Mohamed B, Hamza B, Aissa K, Ahmed E, and Rafik B (2023). An optimal coordination of directional overcurrent relays using a Gorilla troops optimizer," In: 2023 International Conference on Advances in Electronics, Control and Communication Systems (ICAECCS), 2023, pp 1–5
Kaur S and Ralhan S (2023) Directional over current relay coordination in presence of distributed generation using Harris' Hawks optimization for adaptive protection," In: 2023 Third International Conference on Advances in Electrical, Computing, Communication and Sustainable Technologies (ICAECT), 2023, pp 1–7
Adeosun O and Cecchi V (2023) Optimal coordination of directional overcurrent relays using numerical iterative method. In: 2023 IEEE Texas Power and Energy Conference (TPEC), 2023, pp 1-6
Karmakar A, Santra T, Chanda CK, and Mahapatra S (2023) Optimal coordination of directional over current relay using analytical and swarm algorithms. In: 2023 International Conference for Advancement in Technology (ICONAT), 2023, pp. 1-6
Ma L, Yu J (2022) Hierarchical clustering cuckoo search optimization implemented in optimal setting of directional overcurrent relays. Math Probl Eng 2022:1–18
Abdelhamid M, Houssein EH, Mahdy MA, Selim A, Kamel S (2022) An improved seagull optimization algorithm for optimal coordination of distance and directional over-current relays. Expert Syst Appl 200:116931
Yazdaninejadi A, Nazarpour D, Talavat V (2019) Coordination of mixed distance and directional overcurrent relays: miscoordination elimination by utilizing dual characteristics for DOCR s. Int Trans Electr Energy Syst 29:762
Korashy A, Kamel S, Jurado F, Eslami M (2023) Optimal coordination of distance relays and non-standard characteristics for directional overcurrent relays using a modified African vultures optimization algorithm. IET Gener, Transm Distrib. https://doi.org/10.1049/gtd2.12833
Perez LG, Urdaneta AJ (2001) Optimal computation of distance relays second zone timing in a mixed protection scheme with directional overcurrent relays. IEEE Trans Power Deliv 16:385–388
Abdelhamid M, Kamel S, Ahmed EM, Agyekum EB (2022) An Adaptive protection scheme based on a modified heap-based optimizer for distance and directional overcurrent relays coordination in distribution systems. Mathematics 10:419
Abdelhamid M, Kamel S, Selim A, Zeinoddini-Meymand H (2023) Integrating distribution generators in microgrid with an adaptive protection scheme using chaotic leader Honey Badger Algorithm. https://doi.org/10.22541/au.168018200.04298164/v1
Singh DK, Sarangi S, Singh AK, Mohanty SR (2023) Coordination of dual-setting overcurrent and distance relays for meshed distribution networks with distributed generations and dynamic voltage restorer. Smart Sci 11:135–153
Assouak A, Benabid R (2023) A new coordination scheme of directional overcurrent and distance protection relays considering time-voltage-current characteristics. Int J Electr Power Energy Syst 150:109091
Abdelhamid M, Kamel S, Nasrat L, Shahinzadeh H, and Nafisi H (2022) Adaptive coordination of distance and direction overcurrent relays in active distribution networks based on the tunicate swarm algorithm. In: 2022 12th Smart Grid Conference (SGC), 2022, pp 1–6
Korashy A, Kamel S, Youssef A-R, Jurado F (2020) Development and application of an efficient optimizer for optimal coordination of directional overcurrent relays. Neural Comput Appl 32:8561–8583
Korashy A, Kamel S, Youssef A-R, and Jurado F (2018) "Evaporation rate water cycle algorithm for optimal coordination of direction overcurrent relays. In: 2018 Twentieth International Middle East Power Systems Conference (MEPCON), 2018, pp 643-648
Korashy A, Kamel S, Alquthami T, Jurado F (2020) Optimal coordination of standard and non-standard direction overcurrent relays using an improved moth-flame optimization. IEEE Access 8:87378–87392
Coello CAC (2002) Theoretical and numerical constraint-handling techniques used with evolutionary algorithms: a survey of the state of the art. Comput Methods Appl Mech Eng 191:1245–1287
Eskandar H, Sadollah A, Bahreininejad A, Hamdi M (2012) Water cycle algorithm—a novel metaheuristic optimization method for solving constrained engineering optimization problems. Comput Struct 110:151–166
Poli R, Kennedy J, Blackwell T (2007) Particle swarm optimization. Swarm Intell 1:33–57
Rezaei H, Bozorg-Haddad O, and Chu X (2018) Grey wolf optimization (GWO) algorithm. In: Advanced Optimization by Nature-Inspired Algorithms, ed: Springer, 2018, pp 81–91
Faramarzi A, Heidarinejad M, Stephens B, Mirjalili S (2020) Equilibrium optimizer: a novel optimization algorithm. Knowl-Based Syst 191:105190
Abdollahzadeh B, Soleimanian Gharehchopogh F, Mirjalili S (2021) Artificial gorilla troops optimizer: a new nature-inspired metaheuristic algorithm for global optimization problems. Int J Intell Syst 36:5887–5958
Karami H, Anaraki MV, Farzin S, Mirjalili S (2021) Flow Direction Algorithm (FDA): a novel optimization approach for solving optimization problems. Comput Ind Eng 156:107224
Abdollahzadeh B, Gharehchopogh FS, Mirjalili S (2021) African vultures optimization algorithm: a new nature-inspired metaheuristic algorithm for global optimization problems. Comput Ind Eng 158:107408
Tjahjono A, Anggriawan DO, Faizin AK, Priyadi A, Pujiantara M, Taufik T et al (2017) Adaptive modified firefly technique for optimal coordination of overcurrent relays. IET 11:2575–2585
Funding
Funding for open access publishing: Universidad de Jaén/CBUA.
Author information
Authors and Affiliations
Contributions
AK: Conceptualization, Methodology, Software SK: Conceptualization, Methodology, Software FJ: Conceptualization, Data curation, Writing- Original draft preparation.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest regarding the publication of this manuscript.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Informed consent
Not Applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Korashy, A., Kamel, S. & Jurado, F. Optimizers for optimal coordination of distance relays and non-standard characteristics of directional overcurrent relays. Electr Eng 105, 3581–3615 (2023). https://doi.org/10.1007/s00202-023-01889-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00202-023-01889-1