
Abstract
The ionospheric mapping function (MF) for Global Navigation Satellite System (GNSS), a mutual projection method for the slant total electron content (STEC) and vertical total electron content, is one of the significant factors affecting the performance of ionospheric models. The commonly used MF assumes isotropic TEC variations and takes into account only the satellite elevation angle, which may result in significant ionospheric projection errors, especially at low elevation angles. Based on the single-layer model, we propose an additional azimuth parameter mapping function (APMF). The APMF was estimated and evaluated by the NeQuick model during the periods of January 2014 and January 2022 from the aspect of simulation and measured STEC during the periods of 2014 and 2022 from the aspect of actual measurements over China, respectively. Compared to the modified single-layer model mapping function (MSLM-MF), the experimental results indicate that (1) The APMF can significantly reduce the ionospheric projection error, and the fluctuation in errors with different azimuth angles is small. (2) According to the evaluation based on the NeQuick simulation during the TEC peak time, when the ionosphere is quite active, the upper and lower quartiles of the absolute projection error boxplot of the APMF relative to the MSLM-MF in January 2014 are reduced by 56.1% and 60.0%, respectively, and in January 2022, they are reduced by 67.7% and 65.2%, respectively. Similarly, the upper whiskers in the boxplot are reduced by 54.7% and 67.5% in January 2014 and January 2022, respectively; the APMF performance in terms of the root mean square error (RMSE) is improved by 47.0% in January 2014 and 58.3% in January 2022. (3) According to the evaluation based on the measured STEC from GNSS raw data during the TEC peak time, the upper and lower quartiles of the absolute mapping error boxplot of the APMF relative to the MSLM-MF in 2014 are reduced by 48.9% and 46.9%, respectively, while in 2022, they are reduced by 48.3% and 41.2%, respectively. The upper whiskers in the boxplot are reduced by 41.8% and 35.2% in 2014 and 2022, respectively; the APMF performance in terms of RMSE is improved by 44.6% in 2014 and 39.2% in 2022.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The ionosphere has a severe impact on the performance of the Global Navigation Satellite System (GNSS), and research on GNSS ionospheric total electron content (TEC) models has been prevalent in the GNSS field (Feltens et al. 2011; Hernández-Pajares et al. 2009; Jakowski et al. 2011; Komjathy 1997; Li et al. 2020; Schaer 1999). GNSS ionospheric modeling errors mainly originate from the fitting error of the TEC mathematical function, the differential code bias (DCB) of satellite and receiver hardware, the quality of GNSS data, and the mapping function error, including the ionospheric thin-layer assumption. In the last few decades, researchers have carried out a series of studies and proposed different TEC modeling methods, including the use of spherical harmonic function and polynomial function (Schaer 1999), generalized trigonometric series (Yuan et al. 2007; Yuan and Ou 2004), a spherical cap harmonic function (Liu et al. 2010), two-layer and multilayer tomography (Juan et al. 1997; Kong et al. 2016), and regularized estimation of vertical total electron content (Arikan et al. 2003). The methods of estimating GNSS satellite and receiver hardware DCB include a “two-step method” (Li et al. 2013, 2012), a “one-step method” that estimates DCB simultaneously with TEC model coefficients (Lanyi and Roth 1988), and an auxiliary method based on the Global Ionospheric Map (GIM) TEC (Montenbruck et al. 2014). The commonly used methods for extracting GNSS STEC include the carrier-phase smoothing code method (Mannucci et al. 1998) and the precise point positioning method (Liu et al. 2019; Zhang et al. 2012). Studies of the ionospheric thin-layer assumption include analyzes of the influence of thin-layer height on TEC modeling (Birch et al. 2002; Brunini et al. 2011; Sakai et al. 2009; Xiang & Gao 2019) and the effect of the Earth’s oblateness on GNSS TEC maps (Hobiger et al. 2007). The ionospheric mapping function (MF) converts the line-of-sight (LOS) slant total electron content (STEC) into the vertical total electron content (VTEC), and there are different ionospheric MF models, including the single-layer model MF (Wilson and Mannucci 1993), modified single-layer model MF (Schaer 1999), Klobuchar MF (Klobuchar 1987) and Fanselow MF (Sardón et al. 1994).
However, most of the current MFs are related only to the satellite elevation angle and do not consider the impact of different azimuth angles on the MF. It is assumed that the VTEC of the ionospheric pierce point (IPP) at different azimuth angles for the same elevation should be transformed into equal STEC. In fact, in low-latitude regions with more active ionospheric activity, there is a significant difference in TEC horizontal gradients (Nava et al. 2007; Rao et al. 2006), which leads to a larger ionospheric mapping error (IME) for MFs related to satellite elevation angles only (Brunini et al. 2011; Hoque and Jakowski 2013; Sakai et al. 2009). Hoque et al. (2014) showed that the standard deviation error caused by thin-layer mapping function conversion at low elevation angles is approximately 10–20 TECu at different latitudes. Jiang et al. (2017) showed the impact of ionospheric TEC gradients on IME and revealed that IME exhibits regular changes with the solar activity season; the maximum error can reach 20 TECu in low-latitude areas during high solar activity.
Considering the limitations of common MFs, several researchers have explored methods for improving thin-layer MFs. Lyu et al. (2018) devised a climate prediction pattern for estimating the TEC shape parameters of the top ionosphere via polynomial functions and proposed the BIMF method. The experiment proved that the IME was effectively reduced in mid-latitude areas of the Northern Hemisphere. Zus et al. (2017) used the ionospheric electron density field of the IRI empirical model to establish a grid MF table incorporating the time, position, elevation angle and azimuth angle. Hoque and Jakowski (2013) estimated the ionospheric TEC by introducing the normal distribution error function and Chapman function. Yuan et al. (2020) developed a multilayer MF based on inequality constraints to weaken the impact of errors from existing MFs. Chen et al. (2022a; b) proposed an MF that takes into account the local time and date using empirical orthogonal functions and demonstrated the effective applicability of proposed MF in the mid-latitude areas of the Northern Hemisphere. Chen et al. (2022a; b) proposed a mapping function named the SGG-MF. The SGG-MF considers the influence of the azimuth and is divided into vertical and horizontal parts with a correcting parameter. Ionospheric mapping error has been a prevalent issue that many researchers have been diligently addressing in recent years. And the mapping function error is also a major challenge in further for the improvement of GNSS TEC modeling to meet the growing demands of GNSS users (especially in low-latitude regions) for fast and precise positioning services (Li et al. 2013; Minkwitz et al. 2014).
In this study, we propose an additional azimuth parameter MF (APMF) considering the variation in the ionospheric TEC with azimuth and local time. The key difference between the APMF and SLM projection functions is the addition of trigonometric function terms for the azimuth and local time. As the variation in the ionospheric TEC is relatively minor in the east‒west direction, the APMF simplifies to the SLM when the azimuth angle is 90° or 270° which corresponds to VTEC projections in the east‒west direction. In addition, the performance of the APMF algorithm is evaluated using both the NeQuick model and GNSS measurement data.
2 The mapping function for GNSS TEC
2.1 Single-layer model and modified single-layer model MF
In the field of GNSS TEC modeling, it is usually assumed that all ionospheric free electrons are concentrated within an infinitely thin sphere at a specific height (such as 450 km). The intersection of the LOS between the GNSS receiver and the satellite in the thin layer is called the IPP, and all the ionospheric VTEC information in the vertical zenith direction is concentrated in the IPP. The STEC on the LOS can be obtained through the conversion of the VTEC and the thin-layer MF: STEC = VTEC/SLM, where SLM is the single-layer model MF (Wilson and Mannucci 1993).
where \({E^\prime }\) is the satellite elevation angle at the IPP and \({E^\prime } = a\cos \left( {\frac{\cos (E)R}{{R + H}}} \right)\); \(E\) is the elevation angle at the GNSS receiver, and R and H are the Earth’s radius and the height of the ionospheric thin layer, respectively.
Based on the classical single-layer model MF, the Centre for Orbit Determination in Europe (CODE) proposed a modified single-layer model mapping function (MSLM-MF):
where \({H}_{\text{opt}}\)= 506.7 km and \(\alpha \) = 0.9782.
Therefore, we will use the MSLM-MF as a reference for analysis, discussion and comparison with the APMF proposed in this study.
2.2 Additional azimuth parameter MF (APMF)
The SLM MF is related only to the satellite elevation angle, while the APMF in this study introduces the GNSS satellite azimuth angle, reflecting the anisotropic variation characteristics of the ionospheric TEC in terms of azimuth. The expression of APMF is:
where \({E}^{\prime}\) is the satellite elevation angle at the IPP; \(\upomega \) is the azimuth angle of the GNSS satellite; t is the local time at the IPP; \({E}_{0},{E}_{1,n},{E}_{2,n},{E}_{3,m},{E}_{4,m}\) are the estimated coefficients of the APMF; n and m are the orders of the APMF coefficients; and \({n}_{max}\) and \({m}_{max}\) are the maximum orders of the coefficients.
A comparison of Eq. (1) with Eq. (3) reveals that the difference between the APMF and SLM lies in the terms other than \({\text{sin}}(E\mathrm{^{\prime}})\). Compared with the SLM MF, the APMF considers ionospheric variations at different azimuths and local times.
3 Data
Since GNSS-measured data cannot provide STEC and VTEC data at arbitrary satellite elevations and azimuthal angles for a given IPP, it is challenging to represent the variation in projection error with respect to azimuthal angle at a particular location, aiming to represent different typical characteristics of projection errors in different spatial directions. Here, simulation studies are presented that examine the azimuthal variations in the projection errors of ionospheric mapping functions at different specified locations using the NeQuick model, which enables the generation of realistic yet controlled ionospheric scenarios for the evaluation of the projection errors that are produced when different mapping functions are used to replicate those scenarios. In addition, GNSS-measured observations from the Crustal Movement Observation Network of China (CMONOC) were used to evaluate the error and accuracy of the different mapping functions. In summary, the coefficients (\({E}_{0},{E}_{1,n}, {E}_{2,n},{E}_{3,m},{E}_{4,m}\)) of the APMF are calculated by the NeQuick model and measured by the STEC from the GNSS raw data over China. Subsequently, the IME and RMSE accuracies of the MSLM-MF and APMF are analyzed and discussed, and the effectiveness of the APMF is evaluated.
3.1 NeQuick TEC data
Compared with the two-dimensional ionospheric TEC model, the NeQuick model can describe the three-dimensional structure of the ionospheric electron density and directly derive the zenith VTEC and STEC information on the LOS without using an MF (Radicella 2009). In this paper, we use the NeQuick model to simulate daily VTEC and STEC data collected in January 2014 and January 2022 at 50 GNSS stations by the CMONOC. The distribution of stations is shown in Fig. 1, where 40 reference stations (blue dots) are used to calculate the APMF coefficients and 10 monitoring stations (red dots) are used to evaluate the IME and RMSE accuracy of the APMF.

Distribution of the GNSS stations, where the simulation data of the ionospheric VTEC and STEC were generated by using the NeQuick model (the blue dots represent the locations of the reference stations for calculating the APMF coefficients, while the red dots represent the locations of the monitoring stations for evaluating the performance of the APMF)
3.2 TEC data from GNSS
In this study, we refer to the method presented by Nava et al. (2007) and apply the precise point positioning (PPP) technique to extract high-precision ionospheric TEC data from GNSS observations. In addition, we analyze and discuss the TEC conversion performance of the MSLM-MF and APMF. The method is shown in Fig. 2 and briefly described as follows: if the relationship between the latitude and longitude of two ionospheric piercing points, IPP1 (λ1, φ1) and IPP2 (λ2, φ2), satisfies Eq. (4), where the satellite elevation angle corresponding to IPP1 is greater than 70° and the satellite elevation angle corresponding to IPP2 is less than 40°, the two “high–low” paired pierce points can be considered coinciding pierce points (CPPs). Assuming that the TECs of two LOSs at the CPP are STEC1 and STEC2, and that the IME can be considered negligible when the elevation angle is greater than 70°, the VTEC1 (= STEC1 × MSLM-MF) obtained from STEC1 can be considered the VTEC at the CPP. On this basis, we convert VTEC1 to the LOS of satellite2 by means of the MSLM-MF and APMF to obtain STECMSLM and STECAPMF, respectively. By comparing STECMSLM and STECAPMF with STEC2, the IME and RMSE of the MF can be obtained.

Diagram of the CPP method
It should be noted that the CPP method relies on a relatively dense network of regional GNSS monitoring stations; without such a network, it is difficult to obtain sufficient ionospheric STEC information through “high–low” CPP at the same epoch. Additionally, the densely distributed GNSS monitoring stations from the CMONOC provide the opportunity to analyze and discuss the application effects of ionospheric MFs over China.
In this study, we use data from approximately 240 GNSS monitoring stations over China during the period of the year 2014 and 2022 to evaluate the IME and RMSE accuracies of different MFs. Figure 3 shows the distribution of CPPs in China for January 19, 2014, and January 19, 2022. It should be noted that in the next section, only the data obtained at the CPP that were not used in the calculation of APMF coefficients were utilized for evaluating the application effect of MFs.

Distribution of GNSS ionospheric CPPs
The blue dots represent the distribution of the CPPs used to calculate the coefficients of the APMF, while the red dots represent the distribution of the CPPs used to evaluate the APMF and MSLM-MF. The left subgraph shows the distribution of CPPs on January 19, 2014, and the right subgraph shows the distribution of CPPs on January 19, 2022.
4 The APMF based on the NeQuick model
4.1 The calculation of the APMF based on the NeQuick model
The MF value (MFV) at an IPP can be obtained by using the NeQuick model, which can be expressed as:
where \(\left( {{\varphi_{{\text{ipp}}}},{\lambda_{{\text{ipp}}}},{h_{{\text{ion}}}}} \right)\) gives the latitude, longitude and geodetic height at the IPP. \(E\) and \(A\) are the elevation and azimuth angles of the LOS. The ionospheric height coverage range is \({h}_{r}=60 {\text{km}}\),\({h}_{s}=20000 {\text{km}}\). \(N\left(h\right)\) represents the electron density at any point with height h. \(N\left(r\right)\) represents the electron density along the r-ray direction. The VTEC and STEC passing through the IPP \(\left( {{\varphi_{{\text{ipp}}}},{\lambda_{{\text{ipp}}}},{h_{{\text{ion}}}}} \right)\) can be expressed as \(\mathop \smallint \limits_{h_1}^{h_2} N\left( {{\varphi_{{\text{ipp}}}},{\lambda_{{\text{ipp}}}},h} \right) \cdot {\text{d}}h\) and \(\mathop \smallint \limits_{r_1}^{r_2} N\left( {{\varphi_{{\text{ipp}}}},{\lambda_{{\text{ipp}}}},E,\;A,r} \right){\text{d}}r\), respectively.
The STEC and VTEC under different elevations and azimuth angles can be calculated by using the NeQuick model; then, the MFV can be calculated according to Eq. (5), and the following formula can be obtained by substituting the MFV into the APMF of Eq. (3):
where \({n_{\max }} = {m_{\max }} = 12\). For convenient APMF application, six latitudinal zones are constructed at intervals of 5° (the latitude range is 20°–50°N), as shown in Fig. 1. In different latitudinal zones, the NeQuick model is used to simulate ionospheric VTEC and STEC data at the GNSS reference stations (blue dots), and the VTEC and STEC data are substituted into Eqs. (5) and (6). The APMF coefficients \({E}_{0},{E}_{1,n},{E}_{2,n},{E}_{3,m},{E}_{4,m}\) in different latitudinal bands can then be calculated using the least-squares technique to finally obtain the APMF values. In this paper, the positions of the GNSS monitoring stations (red dots) in Fig. 1 are back-substituted into the APMF coefficient to obtain the corresponding MF values, and the IME and RMSE accuracy evaluations are carried out with the NeQuick model.
4.2 The analysis and evaluation of the APMF based on the NeQuick model
The “true” reference values of STECNEQ and VTECNEQ are calculated by the NeQuick model, and the VTECNEQ values are converted into STECMSLM and STECAPMF by using the MSLM-MF and APMF, respectively. Figure 4 shows the variations in three STECs (STECNEQ, STECMSLM and STECAPMF) with the azimuth angle at GXNN (22.6°N, 108.2°E) under different elevation angles (10°/20°/30°/40°) at LT = 12:00 on January 19, 2014.

Variation in the STEC with azimuth angle under different elevations at station GXNN for LT = 12 on January 19, 2014: a elevation angle = 10°, b elevation angle = 20°, c elevation angle = 30° and d elevation angle = 40° (the black line represents the true reference value of the STEC calculated by the NeQuick model; the blue line and red line represent STECMSLM and STECAPMF, respectively, converted by the MSLM-MF and APMF based on VTECNEQ)
Figure 4 shows that when the elevation angle is greater than 30°, the differences among STECNEQ, STECMSLM and STECAPMF are small (when the elevation angle is 40°, the maximum mutual difference among STECNEQ, STECMSLM and STECAPMF is 3.0 TECu), indicating that the difference between the MFs decreases with increasing elevation. When the elevation angle is less than 30°, the difference between STECMSLM and STECAPMF with respect to the reference value STECNEQ is obvious (when the elevation angle is 10°, the maximum difference between STECNEQ and STECMSLM can reach 24.2 TECu, while the maximum difference between STECNEQ and STECAPMF is only 8.6 TECu). In addition, the variations in STECNEQ and STECAPMF with the change in azimuth are quite consistent.
To show and discuss the variation in the STEC mapping error of the MSLM-MF and APMF for different azimuth angles more clearly, the next section discusses and analyzes only the IME and RMSE accuracy of STECMSLM and STECAPMF relative to the reference value of STECNEQ within the range of 10°–30° elevation.
4.2.1 The analysis of STEC projection error
The absolute STEC projection error of an MF based on the NeQuick model in this section is defined as follows:
where MF can be either the MSLM-MF or the APMF. STECNEQ represents the true STEC value calculated by NeQuick, while VTECNEQ represents the true VTEC value calculated by NeQuick. DSTEC represents the absolute IME for STEC conversion.
Figure 5 shows the variation in DSTEC of the MSLM-MF and APMF with varying azimuth angle at different locations (GXNN (22.6°N, 108.2°E), FJWY (27.6°N, 118.0°E), BJFS (39.6°N, 115.9°E) and NMAL (43.9°N, 120.1°E)) at different elevation angles (10°/20°/30°) at LT = 12:00 on January 19, 2014, and January 19, 2022.

For January 19, 2014 (left column), and January 19, 2022 (right column), at LT = 12:00, variation in the absolute conversion error value (DSTEC) for the MSLM-MF and APMF with different azimuth angles for the GXNN, FJWY, BJFS and NMAL stations at different elevations (10°/20°/30°) is shown. (The solid line indicates the result for an elevation angle of 10°, the dashed line indicates the result for an elevation angle of 20° and the dotted line indicates the result for an elevation angle of 30°)
The left column of Fig. 5 indicates that in 2014, relative to the true reference value of STECNEQ, the IME of the MSLM-MF and APMF increased gradually with decreasing elevation angle. On January 19, 2014, at 12:00 LT (left column of Fig. 5), at an elevation angle of 10°, the projection error (DSTEC) of the APMF (red line) relative to the MSLM-MF (blue line) is reduced by a maximum of 15.6 TECu and 13.4 TECu, while the average projection error is reduced by 8.9 TECu and 8.7 TECu for the GXNN and FJWY stations, respectively, which are greatly affected by the ionospheric TEC gradient. The APMF projection error is reduced by a maximum of 7.2 TECu and 6.9 TECu, while the average projection error is reduced by 9.0 TECu and 8.0 TECu at the mid-latitude BJFS and NMAL stations, respectively. On January 19, 2022, at 12:00 LT (right column of Fig. 5), the maximum projection error of the APMF function is reduced by 7.8 TECu and 6.3 TECu, while the average projection error is reduced by 6.1 TECu and 5.3 TECu for the low-latitude GXNN and FJWY stations, respectively. The maximum projection error of the APMF function is reduced by 5.6 TECu and 4.5 TECu, while the average projection error is reduced by 7.0 TECu and 6.1 TECu at the mid-latitude BJFS and NMAL stations, respectively.
It is worth noting that, compared with the projection error results of the MSLM-MF algorithm, the APMF algorithm has less fluctuation in different directions, effectively mitigating the phenomenon of high variation in the ionospheric STEC projection error with respect to the azimuth angle.
Furthermore, in this study, the NeQuick model was used to simulate the STEC and VTEC data at different stations (the evaluation stations are marked with red dots in Fig. 1, and the locations of the stations are shown in Table 1) during the periods of January 2014 and January 2022. The conversion errors (DSTEC) of the MSLM-MF and APMF are calculated, and boxplots are generated to analyze the statistical results of the DSTEC at different stations over the entire day (LT = 0–24), during daytime (LT = 8–17) and during the TEC peak time (LT = 12–16), as shown in Fig. 6. The blue boxplot represents the statistical results of the MSLM-MF projection error, and the red boxplot represents the statistical results of the APMF projection error. The upper boundary line of the boxplot represents the 75th percentile of the statistical results from small to large, and the lower boundary line represents the 25th percentile of the statistical results from small to large. The distance between the upper quartile and the lower quartile is the interquartile range (IQR). The middle line of the boxplot indicates the median of the statistical results. The upper limit of the error is the maximum value of the statistical results extended to 1.5 times the IQR from the upper boundary line of the boxplot (the “whisker” extends to the upper quartile, 1.5 times the IQR), and the lower limit of the error is the minimum value of the statistical results extended to 1.5 times the IQR from the lower boundary line of the boxplot (the “whisker” extends to the lower quartile, 1.5 times the IQR). The data values between the upper and lower limits of the error are approximately 99.3% of all the statistical results (Krzywinski & Altman 2014).

Boxplot of the absolute STEC projection error (DSTEC) of the MSLM-MF and APMF based on the NeQuick model for different time periods. a–c Results in January 2014; d–f Results in January 2022. (The blue and red boxplots represent the DSTEC results of the MSLM-MF and APMF, respectively, with the latitude of the ten monitoring stations increasing gradually from left to right.)
As shown in Fig. 6, the APMF is significantly better than the MSLM-MF at different time periods and various stations (from low latitudes to middle latitudes). During the TEC peak time, when ionospheric activity is greater, in January 2014, the Q3 and Q1 of the APMF relative to those of the MSLM-MF are reduced by 56.1% and 60.0%, respectively; in January 2022, the Q3 and Q1 of the APMF are reduced by 67.7% and 65.2%, respectively. As indicated from the results, compared with the MSLM-MF, the APMF significantly reduces the mapping error, and Q3 and Q1 of the IME boxplot are reduced by more than 55%. In addition, the height of the IME boxplot of the MSLM-MF is obviously greater than that of the APMF, which reflects that the STEC mapping error of the APMF fluctuates less; that is, the mapping error of the APMF fluctuates less with azimuth and time, which is similar to the results of Fig. 5.
As demonstrated in Fig. 6, the APMF outperforms the MSLM-MF at different time periods and stations (from low to mid-latitudes). During the TEC peak time in January 2014, a period of heightened ionospheric activity, the upper and lower APMF quartiles are reduced by 56.1% and 60.0%, respectively, in comparison with those of the MSLM-MF.
As shown in Fig. 6, in January 2022, the upper and lower quartiles of the APMF values decreased by 67.7% and 65.2%, respectively, compared to those of the MSLM-MF. The results indicate that the APMF significantly reduces the projection error of the ionospheric STEC compared to that of the MSLM-MF. The upper and lower quartiles of the APMF in the DSTEC boxplot are reduced by more than 55%. Additionally, the height of the DSTEC boxplot of the MSLM-MF is significantly greater than that of the APMF, which is similar to the results in Fig. 5. The boxplot also suggests that the APMF has a smaller fluctuation in the STEC projection error, which means that the projection error of the APMF has a smaller fluctuation with the variation in the azimuth angle and time.
Since the upper whisker of the DSTEC error in the boxplot presents the maximum value of the IME statistical results, Table 2 shows the average statistical results for the upper whisker of the MSLM-MF and APMF projection DSTEC error boxplots at 10 monitoring stations in January 2014 and January 2022 during the entire day (LT = 0–24), daytime (LT = 8–17) and TEC peak time (LT = 12–16). The results from table show that the DSTEC error upper whisker of the STEC projection error obtained by the APMF is significantly smaller than that of the MSLM-MF in different time periods. Moreover, during the TEC peak time, the upper whisker of the errors of the APMF relative to that of the MSLM-MF is reduced by 54.7% and 67.5% in January 2014 and January 2022, respectively. The statistical results in Table 2 also show that, compared to the MSLM-MF, the APMF reduces the upper whisker of the error of the STEC projection by more than 50%.
4.2.2 The analysis of STEC projection accuracy
In this section, the RMSE of the projection accuracy of the ionospheric STEC from the MF based on NeQuick is defined by Eq. (8):
where n (i = 1, n) represents the number of data values used to calculate the statistics.
The projection error \(\Delta {\text{STEC}}\) of the ionospheric STEC from the MF based on NeQuick and the average projection error \(\overline {\Delta {\text{STEC}}} \) are defined by Eq. (9) and Eq. (10):
Figure 7 shows the histogram of the ΔSTEC statistical results of the STEC projection error during the TEC peak time in January 2014 and January 2022 for all the monitoring stations. The horizontal axis represents the STEC error, and the vertical axis represents the normalized error occurrence probability. In January 2014, the average ionospheric STEC conversion errors for the MSLM-MF and APMF are 4.7 TECu and − 1.8 TECu, respectively, while the RMSE accuracies are 8.3 TECu and 4.4 TECu, respectively. The conversion accuracy of the APMF is improved by 47.0%. In January 2022, the average STEC conversion errors of the MSLM-MF and APMF are 1.6 TECu and 1.1 TECu, respectively, and the RMSE accuracies are 6.9 TECu and 4.4 TECu, respectively. The STEC projection accuracy of the APMF is improved by 36.2%. Compared to the MSLM-MF, the APMF improves the RMSE projection accuracy of the ionospheric STEC by more than 35% for January 2014 and January 2022.

Statistical histogram of the STEC conversion error ΔSTEC for all stations. a Results in January 2014; b results in January 2022
5 The APMF based on the TEC from the GNSS raw data
5.1 The calculation of the APMF based on the TEC from the GNSS raw data
Following the descriptions in Sects. 3.2 and 4.1, the APMF coefficient is derived by the measured GNSS data for the TEC. First, the high–low CPP is determined, and the ionospheric STEC1 corresponding to the piercing point with a GNSS satellite elevation angle greater than 70° and the ionospheric STEC2 corresponding to the piercing point with a GNSS satellite elevation angle less than 30° are obtained. Second, the projected VTEC in the zenith direction obtained by projecting the ionospheric STEC1 is taken as the zenith VTEC “true” reference value at the CPP. Finally, the projection value can be determined for each CPP.
In this paper, six latitudinal bands are constructed at intervals of 5° (the latitude range is 20°-50°N). The corresponding calculated MFVs for different elevations, azimuth angles and times are obtained by using CPPs that satisfy “high–low” conditions within different latitudinal bands. Referring to the method for calculating the APMF coefficient based on the NeQuick model, the calculated value of Eq. 11 is back-substituted into Eq. 6 with \({n_{\max }} = {m_{\max }} = 12\) to obtain the maximum order of the APMF coefficient. The APMF coefficients of different latitudinal bands are calculated using all available CPPs in the region via the least-squares method. Finally, the STEC projection errors are analyzed and evaluated by using other CPPs that are not included in the coefficient estimation of the APMF.
5.2 The analysis and evaluation of the APMF based on the TEC from GNSS raw data
5.2.1 The analysis of the STEC projection error
In this section, the discussion of ionospheric STEC projection is carried out using high–low CPP values that are not involved in the calculation of APMF coefficients. According to Fig. 2, the ionospheric TECs passing through the ionospheric pierce points IPP1 and IPP2 obtained by GNSS satellites and the receiver LOS are STEC1 and STEC2, respectively. Referring to Sect. 3.2, the absolute value of the STEC conversion error based on the GNSS TEC mapping function in this paper is defined as follows:
where MF can be either the MSLM-MF or the APMF. VTEC1 is converted by the MF based on the STEC of the CPP with an elevation angle greater than 70°. STEC2 represents the STEC of the CPP with an elevation angle ranging from 10° to 30°, and DSTEC represents the absolute STEC projection error of the MF.
To analyze the projection errors of different MFs for STEC based on GNSS TEC data, boxplots are generated to analyze statistical DSTEC results in different regions during the entire day (LT = 0–24), daytime (LT = 8–17) and TEC peak time (LT = 12–16). As shown in Fig. 8, in 2014 and 2022, at different time periods and regions, the median, upper and lower quartiles of the APMF in the DSTEC boxplots are significantly smaller than those of the MSLM-MF. During the TEC peak time, a period of heightened ionospheric activity, the upper and lower quartiles of the APMF relative to the MSLM-MF in 2014 are reduced by 48.9% and 46.9%, respectively, while the upper and lower quartiles of the APMF relative to the MSLM-MF in 2022 are reduced by 48.3% and 41.2%, respectively. Compared with the MSLM-MF, the APMF significantly reduces the projection error of the ionospheric STEC. The upper and lower quartiles of the APMF in the DSTEC boxplot are reduced by more than 40%. In addition, the height of the DSTEC boxplot for the MSLM-MF is significantly greater than that for the APMF, which suggests that the STEC projection error of APMF has a smaller fluctuation with the variation in azimuth angle and time, similar to the simulation analysis results based on the NeQuick model in Sect. 4.2.1.

Boxplots of the absolute STEC projection error (DSTEC) for the MSLM-MF and APMF during different periods. a–c Results for 2014; d–f results for 2022 (the blue boxplots and red boxplots represent the DSTECs of the MSLM-MF and APMF, respectively)
Table 3 shows the average statistical results of the upper whisker values of the MSLM-MF and APMF projection error (DSTEC) boxplots for different latitude bands in 2014 and 2022 during the entire day (LT = 0–24), daytime (LT = 8–17) and TEC peak time (LT = 12–16). The results in Table 3 indicate that during the TEC peak time when the ionosphere is more active, the upper whisker error of the APMF relative to that of the MSLM-MF decreases by 41.8% and 35.2% in 2014 and 2022, respectively. The statistical results in Table 3 show that, compared with the MSLM-MF, the APMF reduces the average upper whisker error of STEC projection by more than 35%.
5.2.2 The analysis of STEC projection accuracy
On the basis of Eq. 12, the STEC projection accuracy (RMSE) of the MF based on the measured GNSS TEC data is defined as follows:
where n (i = 1, n) is the total number of IPPs involved in the STEC assessment.
The projection error \(\Delta {\text{STEC}}\) of the STEC from the MF based on GNSS-measured TEC data and the average projection error \(\overline {\Delta {\text{STEC}}} \) are defined as follows:
Figure 9 shows the histogram distribution of the ΔSTEC statistical data for all CPPs of the monitoring points at the peak TEC time in 2014 and 2022. The X-axis represents the STEC error, and the Y-axis represents the probability of normalized error occurrence. As shown in Fig. 9, the average ionospheric STEC projection errors of the MSLM-MF and APMF in 2014 are 5.0 TECu and 0.1 TECu, respectively, while the RMSE accuracy values are 10.8 TECu and 5.7 TECu, respectively. The APMF projection accuracy is improved by 47.2% compared to that of the MSLM-MF. In 2022, the average STEC projection errors of the MSLM-MF and APMF are 4.8 TECu and 0 TECu, respectively, while the RMSE accuracy values are 9.0 TECu and 5.4 TECu, respectively. The STEC projection accuracy of the APMF is improved by 40.0%. Compared to that of the MSLM-MF, the RMSE of the ionospheric STEC projection obtained by the APMF is improved by more than 40% in 2014 and 2022.

The statistical histogram of the STEC projection conversion error ΔSTEC from the CPP of the monitoring stations. a Results in 2014; b results in 2022
To more effectively illustrate the differences between the APMF and MSLM-MF based on the analysis of the RMSE of the STEC, we introduce dRMS and rdRMS for accuracy verification. And the formulas are as follows (Chen et al. 2022a, b):
where \({\text{RMS}}{{\text{E}}_{{\text{APMF}}}}\) and \({\text{RMS}}{{\text{E}}_{{\text{MSLM}}}}\) denote the RMSEs of the APMF and MSLM-MF, respectively, with the GNSS-based TEC.
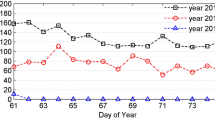
Figure 10 shows the time series of the RMSE, dRMS and rdRMS values of the MSLM-MF and APMF calculated within the latitude range of 20°–50°and satellite elevation angle range of 10°–30° by the GNSS-based TEC in 2014 and 2022. From the RMSE time series shown in the upper subgraph, the RMSE results of the APMF in 2014 and 2022 are lower than those of the MSLM-MF. From the dRMS time series shown in the middle subgraph, compared to the MSLM-MF in 2014, the maximum RMSE difference of the APMF is 12.5 TECu, and the average difference is 6.0 TECu; in 2022, the maximum RMSE difference is 8.6 TECu, and the average difference is 4.5 TECu. From the rdRMS time series shown in the lower subgraph, compared to the MSLM-MF in 2014, the maximum RMSE gain of the APMF reaches 58.5%, and the average gain is 44.6%. In 2022, the maximum RMSE gain reaches 52.9%, and the average gain is 39.2%.

Time series diagrams of the RMSE, dRMS and rdRMS of the MSLM-MF and APMF in 2014 and 2022 within the latitude range of 20°–50°and satellite elevation angle range of 10°–30° (the blue line indicates the MSLM-MF calculation result, and the red line indicates the APMF calculation result)
The above results suggest that the yearly average gains calculated by the RMSE in 2014 and 2022 are basically consistent with the results shown in Fig. 9 (both of which are above 40%).
6 Conclusion and outlook
To address the issue of substantial ionospheric projection errors associated with the traditional GNSS TEC thin-layer mapping function (MSLM-MF), we propose a new GNSS TEC mapping function (APMF) that incorporates azimuth parameters and takes into account the spatiotemporal variation in the ionospheric TEC in different directions, exhibiting commendable performance in terms of STEC projection. The results can be summarized as follow:
-
(1)
The STEC projection error of the APMF is significantly lower than that of the MSLM-MF, and the variation in the APMF projection error at different azimuth angles is minor, which effectively mitigates the high variation in the MSLM-MF mapping error with the azimuth.
-
(2)
The evaluation results using the NeQuick model indicate that in January 2014 and January 2022, the upper and lower quartiles of the projection error boxplot results of the APMF are reduced by more than 55% compared to the STEC projection error of the MSLM-MF. The upper whisker error of the boxplot results decreases by more than 50%, and the projection accuracy is improved by more than 45%.
-
(3)
The evaluation results using GNSS-measured TEC data show that in 2014 and 2022, the APMF significantly outperforms the MSLM-MF. Compared with the STEC projection error of the MSLM-MF, the upper and lower quartiles of the ionospheric projection error boxplot results of the APMF are reduced by more than 40%. The upper whisker error of the boxplot results is reduced by more than 35%, and the projection accuracy is improved by more than 40%.
-
(4)
The evaluation results using GNSS-measured TEC data suggest that in 2014, the gain accuracy (rdRMS) of the APMF reaches 58.5%, and the average gain accuracy (rdRMS) is 44.6% relative to that of the MSLM-MF. In 2022, the maximum gain accuracy (rdRMS) reaches 52.9% and the average gain accuracy (rdRMS) is 39.2%.
The APMF was established using regional observation data in China, and preliminary research was conducted. The data span is relatively short compared to the 11-year periodic solar variation activity. The results are preliminary and are intended to demonstrate the feasibility of the new method. The next step will be to use more data from IGS stations to consider the applicability of the APMF in different years and regions, which is the focus of future research.
Data availability
GNSS data in this study is provided by China Earthquake Networks Center, National Earthquake Data Center (http://data.earthquake.cn), and the precise orbit and clock offset product provided by IGS (https://cddis.nasa.gov/archive/gps/products/), the DCB product provided by CAS (https://cddis.nasa. gov/archive/gps/products/mgex/dcb/).
References
Arikan F, Erol CB, Arikan O (2003) Regularized estimation of vertical total electron content from global positioning system data. J Geophys Res Space Phys. https://doi.org/10.1029/2002JA009605
Birch MJ, Hargreaves JK, Bailey GJ (2002) On the use of an effective ionospheric height in electron content measurement by GPS reception. Radio Sci 37(1):15-11–15-19
Brunini C, Camilion E, Azpilicueta F (2011) Simulation study of the influence of the ionospheric layer height in the thin layer ionospheric model. J Geod 85(9):637–645
Chen J, Ren X, Xiong S, Zhang X (2022a) Modeling and analysis of an ionospheric mapping function considering azimuth angle: a preliminary result. Adv Space Res 70(10):2867–2877
Chen P, Wang R, Yao Y, An Z, Wang Z (2022b) A novel ionospheric mapping function modeling at regional scale using empirical orthogonal functions and GNSS data. J Geod 96(5):34
Feltens J, Angling M, Jackson-Booth N, Jakowski N, Hoque M, Hernández-Pajares M, Aragón-Àngel A, Orús R, Zandbergen R (2011) Comparative testing of four ionospheric models driven with GPS measurements. Radio Sci 46(06):1–11
Hernández-Pajares M, Juan JM, Sanz J, Orus R, Garcia-Rigo A, Feltens J, Komjathy A, Schaer SC, Krankowski A (2009) The IGS VTEC maps: a reliable source of ionospheric information since 1998. J Geod 83(3–4):263–275
Hobiger T, Kondo T, Koyama Y, Ichikawa R, Weber R (2007) Effect of the Earth’s oblateness on the estimation of global vertical total electron content maps. Geophys Res Lett. https://doi.org/10.1029/2007GL029792
Hoque M, Jakowski N (2013) Mitigation of ionospheric mapping function error. In: Proceedings of the 26th international technical meeting of the satellite division of the institute of navigation (ION GNSS+ 2013), Nashville, TN, September 2013, pp 1848–1855
Hoque M, Jakowski N, Berdermann J (2014) A new approach for mitigating ionospheric mapping function errors. In: Proceedings of the 27th international technical meeting of the satellite division of the institute of navigation (ION GNSS+ 2014), Tampa, Florida, September 2014, pp 1183–1189
Jakowski N, Mayer C, Hoque MM, Wilken V (2011) Total electron content models and their use in ionosphere monitoring. Radio Sci 46(06):1–1
Jiang H, Wang Z, An J, Liu J, Wang N, Li H (2017) Influence of spatial gradients on ionospheric mapping using thin layer models. GPS Solut 22(1):2
Juan JM, Rius A, Hernández-Pajares M, Sanz J (1997) A two-layer model of the ionosphere using global positioning system data. Geophys Res Lett 24(4):393–396
Klobuchar JA (1987) Ionospheric time-delay algorithm for single-frequency GPS users. IEEE Trans Aerosp Electron Syst 23(3):325–331
Komjathy A (1997) Global ionospheric total electron content mapping using the global positioning system. Disseration, University of New Brunswick (Canada)
Kong J, Yao Y, Liu L, Zhai C, Wang Z (2016) A new computerized ionosphere tomography model using the mapping function and an application to the study of seismic-ionosphere disturbance. J Geod 90(8):741–755
Krzywinski M, Altman N (2014) Visualizing samples with box plots. Nat Methods 11(2):119–120
Lanyi GE, Roth T (1988) A comparison of mapped and measured total ionospheric electron content using global positioning system and beacon satellite observations. Radio Sci 23(4):483–492
Li Z, Yuan Y, Li H, Ou J, Huo X (2012) Two-step method for the determination of the differential code biases of COMPASS satellites. J Geod 86:1059–1076
Li Z, Yuan Y, Fan L, Huo X, Hsu H (2013) Determination of the differential code bias for current BDS satellites. IEEE Trans Geosci Remote Sens 52:3968–3979
Li Z, Wang N, Hernández-Pajares M, Yuan Y, Krankowski A, Liu A, Zha J, García-Rigo A, Roma-Dollase D, Yang H, Laurichesse D, Blot A (2020) IGS real-time service for global ionospheric total electron content modeling. J Geod 94:1–16
Liu J, Chen R, Wang Z, Zhang H (2010) Spherical cap harmonic model for mapping and predicting regional TEC. GPS Solut 15(2):109–119
Liu T, Zhang B, Yuan Y, Li Z, Wang N (2019) Multi-GNSS triple-frequency differential code bias (DCB) determination with precise point positioning (PPP). J Geod 93(5):765–784
Lyu H, Hernández-Pajares M, Nohutcu M, García-Rigo A, Zhang H, Liu J (2018) The Barcelona ionospheric mapping function (BIMF) and its application to northern mid-latitudes. GPS Solut 22(3):67
Mannucci AJ, Wilson BD, Yuan DN, Ho CH, Lindqwister UJ, Runge TF (1998) A global mapping technique for GPS-derived ionospheric total electron content measurements. Radio Sci 33(3):565–582
Minkwitz D, Gerzen T, Wilken V, Jakowski N (2014) Application of SWACI products as ionospheric correction for single-point positioning: a comparative study. J Geod 88(5):463–478
Montenbruck O, Hauschild A, Steigenberger P (2014) Differential code bias estimation using multi-GNSS observations and global ionosphere maps. Annu Navig 61:191–201
Nava B, Radicella SM, Leitinger R, Coïsson P (2007) Use of total electron content data to analyze ionosphere electron density gradients. Adv Space Res 39(8):1292–1297
Radicella SM (2009) The NeQuick model genesis, uses and evolution. Ann Geophys 52:417–422
Rao P, Niranjan K, Prasad D, Seemala G, Gouthu U (2006) On the validity of the ionospheric pierce point (IPP) altitude of 350 km in the Indian equatorial and low-latitude sector. Ann Geophys 24:2159–2168
Sakai T, Yoshihara T, Saito S, Matsunaga K, Hoshinoo K, Walter T (2009) Modeling vertical structure of ionosphere for SBAS. In: Proceedings of the 22nd international technical meeting of the satellite division of the institute of navigation (ION GNSS 2009), pp 925–935
Sardón E, Rius A, Zarraoa N (1994) Estimation of the transmitter and receiver differential biases and the ionospheric total electron content from Global Positioning System observations. Radio Sci 29(3):577–586
Schaer S (1999) Mapping and predicting the earths ionosphere using the global positioning system. Disseration, Astronomisches Institute of University Bern
Wilson BD, Mannucci AJ (1993) Instrumental biases in ionospheric measurements derived from GPS data. In: Proceedings of the 6th international technical meeting of the satellite division of the institute of navigation (ION GPS 1993), Salt Lake City, UT, September 1993, pp 1343–1351
Xiang Y, Gao Y (2019) An enhanced mapping function with ionospheric varying height. Remote Sens 11(12):1497
Yuan Y, Ou J (2004) A generalized trigonometric series function model for determining ionospheric delay. Prog Nat Sci 14:1010–1014
Yuan Y, Huo X, Ou J (2007) Models and methods for precise determination of Ionospheric delay using GPS. Prog Nat Sci 17(2):187–196
Yuan L, Jin S, Hoque M (2020) Estimation of LEO-GPS receiver differential code bias based on inequality constrained least square and multi-layer mapping function. GPS Solut 24(2):57
Zhang B, Ou J, Yuan Y, Li Z (2012) Extraction of line-of-sight ionospheric observables from GPS data using precise point positioning. Sci China Earth Sci 55(11):1919–1928
Zus F, Deng Z, Heise S, Wickert J (2017) Ionospheric mapping functions based on electron density fields. GPS Solut 21(3):873–885
Acknowledgements
The Authors would like to thank the China Earthquake Networks Center for providing access to GNSS data. We also thank the International Centre for Theoretical Physics (ICTP) for providing the source code of NeQuick model. This work is supported by National Natural Science Foundations of China (No. 42074045), National Key Research & Development Program (No. 2023YFA1009102), National Natural Science Foundations of China (No. 42004027 and 41574033) and the State Key Laboratory of Geodesy and Earth's Dynamics (SKLGED2023-3-3).
Author information
Authors and Affiliations
Contributions
XLH provided the initial idea; XLH and YLL designed the research and performed the experiments; YLL, HJL, WHS processed data; YLL, HJL and QL wrote the manuscript; MML, YWL and YBY helped to accomplish some test; YBY and YL helped with the writing. All authors provided critical feedback and helped to shape the analysis and manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no competing interests to declare that are relevant to the content of this article.
Appendix
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Huo, X., Long, Y., Liu, H. et al. A novel ionospheric TEC mapping function with azimuth parameters and its application to the Chinese region. J Geod 98, 13 (2024). https://doi.org/10.1007/s00190-023-01819-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00190-023-01819-w