
Abstract
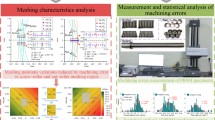
The use of industrial robots for machining large parts has attracted more and more attention. Previous studies have shown that ball-end milling is greatly affected by the process parameters. Besides, robotic machining is also affected by various posture-dependent robot performances. However, these two critical aspects are usually treated separately in many works studying robotic machining. In this paper, a robotic machining system consisting of a six-axis industrial robot, a two-axis positioner and a linear track was developed. The combined effects of milling process parameters and robot postures on the machining results were experimentally investigated. Grey relational analysis–based multi-objective optimization was conducted for lower cutting force and better surface quality. A group of process parameters and robot postures were obtained as the optimal combination that generally yields the best milling performance. The results allow users to preliminarily determine the main factors affecting the quality of robotic machining.

















Similar content being viewed by others

References
Verl A, Valente A, Melkote S, Brecher C, Ozturk E, Tunc LT (2019) Robots in machining. Cirp Ann 68:799–822
Pan R, Zhao W, Wang Z, Ji S, Gao X, Chen D, Fan J (2021) Research on an evaluation model for the working stiffness of a robot-assisted bonnet polishing system. J Manuf Process 65:134–143
Zhang T, Xiao M, Zou Y, Xiao J (2020) Robotic constant-force grinding control with a press-and-release model and model-based reinforcement learning. Int J Adv Manuf Technol 106:589–602
Hu J, Pagilla PR (2021) Dual-edge robotic gear chamfering with registration error compensation. Robot Comput-Integr Manuf, 69
Cen L, Melkote SN (2017) CCT-based mode coupling chatter avoidance in robotic milling. J Manuf Process 29:50–61
Mousavi S, Gagnol V, Bouzgarrou BC, Ray P (2018) Stability optimization in robotic milling through the control of functional redundancies. Robot Comput-Integr Manuf 50:181–192
Chen C, Peng F, Yan R, Li Y, Wei D, Fan Z, Tang X, Zhu Z (2019) Stiffness performance index based posture and feed orientation optimization in robotic milling process. Robot Comput-Integr Manuf 55:29–40
Liao Z-Y, Li J-R, Xie H-L, Wang Q-H, Zhou X-F (2020) Region-based toolpath generation for robotic milling of freeform surfaces with stiffness optimization, Robot Comput-Integr Manuf, 64
Peng J, Ding Y, Zhang G, Ding H (2020) Smoothness-oriented path optimization for robotic milling processes. Sci China Technol Sci 63:1751–1763
Lu Y-A, Tang K, Wang C-Y (2021) Collision-free and smooth joint motion planning for six-axis industrial robots by redundancy optimization, Robot Comput-Integr Manuf, 68
Ji W, Wang L (2019) Industrial robotic machining: a review. Int J Adv Manuf Technol 103:1239–1255
Mali RA, Gupta TVK, Ramkumar J (2021) A comprehensive review of free-form surface milling– Advances over a decade. J Manuf Process 62:132–167
Arruda ÉM, de Paiva AP, Brandão LC, Ferreira JR (2019) Robust optimisation of surface roughness of AISI H13 hardened steel in the finishing milling using ball nose end mills. Precis Eng 60:194–214
Ozturk E, Tunc LT, Budak E (2009) Investigation of lead and tilt angle effects in 5-axis ball-end milling processes. Int J Mach Tools Manuf 49:1053–1062
Dong J, Yu T, Chen H, Li B (2020) An improved calculation method for cutting contact point and tool orientation analysis according to the CC points. Precis Eng 61:1–13
Masmiati N, Sarhan AAD (2015) Optimizing cutting parameters in inclined end milling for minimum surface residual stress – Taguchi approach. Measurement 60:267–275
Vakondios D, Kyratsis P, Yaldiz S, Antoniadis A (2012) Influence of milling strategy on the surface roughness in ball end milling of the aluminum alloy Al7075-T6. Measurement 45:1480–1488
Xu P, Cheung CF, Li B, Wang C, Zhao C (2021) Design, dynamic analysis, and experimental evaluation of a hybrid parallel–serial polishing machine with decoupled motions. J Mech Robot, 13
Xu P, Yao X, Liu S, Wang H, Liu K, Kumar AS, Lu WF, Bi G (2021) Stiffness modeling of an industrial robot with a gravity compensator considering link weights, Mech Mach Theory, 161
Vosniakos G-C, Matsas E (2010) Improving feasibility of robotic milling through robot placement optimisation. Robot Comput-Integr Manuf 26:517–525
AntunesSimões JFCP, Coole TJ, Cheshire DG, Pires AR (2003) Analysis of multi-axis milling in an anthropomorphic robot, using the design of experiments methodology. J Mater Process Tech 135:235–241
Slamani M, Gauthier S, Chatelain J-F (2015) A study of the combined effects of machining parameters on cutting force components during high speed robotic trimming of CFRPs. Measurement 59:268–283
Slamani M, Gauthier S, Chatelain J-F (2014) Analysis of trajectory deviation during high speed robotic trimming of carbon-fiber reinforced polymers. Robot Comput-Integr Manuf 30:546–555
Slamani M, Chatelain J-F (2019) Assessment of the suitability of industrial robots for the machining of carbon-fiber reinforced polymers (CFRPs). J Manuf Process 37:177–195
Muthuramalingam T, Akash R, Krishnan S, Phan NH, Pi VN, Elsheikh AH (2021) Surface quality measures analysis and optimization on machining titanium alloy using CO2 based laser beam drilling process. J Manuf Process 62:1–6
Kuram E, Ozcelik B (2013) Multi-objective optimization using Taguchi based grey relational analysis for micro-milling of Al 7075 material with ball nose end mill. Measurement 46:1849–1864
Uzun G (2019) Analysis of grey relational method of the effects on machinability performance on austempered vermicular graphite cast irons. Measurement 142:122–130
Soorya Prakash K, Gopal PM, Karthik S (2020) Multi-objective optimization using Taguchi based grey relational analysis in turning of Rock dust reinforced Aluminum MMC, Measurement, 157
Unnikrishna Pillai J, Sanghrajka I, Shunmugavel M, Muthuramalingam T, Goldberg M, Littlefair G (2018) Optimisation of multiple response characteristics on end milling of aluminium alloy using Taguchi-Grey relational approach. Measurement 124:291–298
Slamani M, Gauthier S, Chatelain J-F (2016) Comparison of surface roughness quality obtained by high speed CNC trimming and high speed robotic trimming for CFRP laminate. Robot Comput-Integr Manuf 42:63–72
Kuram E, Ozcelik B (2016) Optimization of machining parameters during micro-milling of Ti6Al4V titanium alloy and Inconel 718 materials using Taguchi method. Proc Inst Mech Eng Part B: J Eng Manuf 231:228–242
Fontaine M, Moufki A, Devillez A, Dudzinski D (2007) Modelling of cutting forces in ball-end milling with tool–surface inclination. J Mater Process Tech 189:73–84
Chen J-S, Huang Y-K, Chen M-S (2005) A study of the surface scallop generating mechanism in the ball-end milling process. Int J Mach Tools Manuf 45:1077–1084
Layegh SE, Lazoglu KI (2017) 3D surface topography analysis in 5-axis ball-end milling. Cirp Ann 66:133–136
Wang SB, Geng L, Zhang YF, Liu K, Ng TE (2015) Cutting force prediction for five-axis ball-end milling considering cutter vibrations and run-out. Int J Mech Sci 96–97:206–215
Sai L, Belguith R, Baili M, Dessein G, Bouzid W (2018) An approach to modeling the chip thickness and cutter workpiece engagement region in 3 and 5 axis ball end milling. J Manuf Process 34:7–17
Sun C, Altintas Y (2016) Chatter free tool orientations in 5-axis ball-end milling. Int J Mach Tools Manuf 106:89–97
Funding
This work was supported by the Guangdong Basic and Applied Basic Research Foundation (Grant No. 2021A1515110043), Science and Technology Innovation Committee of Shenzhen (Grant No. GXWD20220811151912002), Academy of Sciences Project of Guangdong Province (Grant No. 2022GDASZH-2022010108) and the Agency for Science, Technology and Research (A∗STAR) of Singapore through the Industry Alignment Fund – Pre-positioning Programme (IAF-PP) (Grant No. A1893a0031).
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Xu, P., Gao, Y., Yao, X. et al. Influence of process parameters and robot postures on surface quality in robotic machining. Int J Adv Manuf Technol 124, 2545–2561 (2023). https://doi.org/10.1007/s00170-022-10640-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-022-10640-2