
Abstract
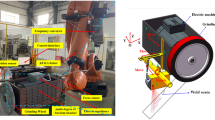
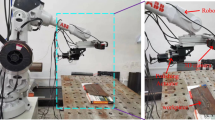
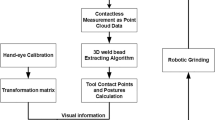
High-performance components with complex geometries make it difficult to determine the position and orientation of grinding tool. In this work, a fast and accurate robotic grinding path planning method is proposed for automatic removal of irregular weldments on a free form surface. The surface of workpiece is digitalized by 3D profile scanner and represented by point cloud data. Statistic filter, weighted least square regression and differences of normal vectors are used for point cloud pre-processing and segmentation. All segments are then modelled by B-spline surfaces to obtain the parent surface. A new superposition method is proposed to create a computer-aided design (CAD) model of the actual workpiece by adding the weld seam to the parent surface. The CAD model is then imported into an off-line simulation system to generate and execute grinding path. With the superposition method, the heights and widths of weld seam are extracted by analysing the difference between point cloud data and the reconstructed parent surface in order to determine the feed rate and size of grinding tool. Experimental results show that the proposed superposition method has the maximum absolute percentage error 5.3% and 41% saving in computation time in comparison with the conventional reverse engineering method.



















Similar content being viewed by others
References
Brinksmeier E, Mutlugünes Y, Klocke F, Aurich J, Shore P, Ohmori H (2010) Ultra-precision grinding. CIRP Ann 59(2):652–671
Chen Z, Tian L, Fu Y, Xu J, Ding W, Su H (2012) Chip formation of nickel-based superalloy in high speed grinding with single diamond grit. Int J Abras Technol 5(2):93–106
Guo S, Li C, Zhang Y, Wang Y, Li B, Yang M, Zhang X, Liu G (2017) Experimental evaluation of the lubrication performance of mixtures of castor oil with other vegetable oils in MQL grinding of nickel-based alloy. J Clean Prod 140:1060–1076
Javaroni R, Lopes J, Sato B, Sanchez L, Mello H, Aguiar P, Bianchi E (2019) Minimum quantity of lubrication (MQL) as an eco-friendly alternative to the cutting fluids in advanced ceramics grinding. Int J Adv Manuf Technol 1–11
Rodriguez RL, Lopes JC, Hildebrandt RA, Perez RRV, Diniz AE, de Ângelo Sanchez LE, Rodrigues AR, de Mello HJ, de Aguiar PR, Bianchi EC (2019) Evaluation of grinding process using simultaneously MQL technique and cleaning jet on grinding wheel surface. J Mater Process Technol 271:357–367
Lopes JC, Ventura CE, Rodriguez RL, Talon AG, Volpato RS, Sato BK, de Mello HJ, de Aguiar PR, Bianchi EC (2018) Application of minimum quantity lubrication with addition of water in the grinding of alumina. Int J Adv Manuf Technol 97(5–8):1951–1959
Boswell B, Islam MN, Davies IJ, Ginting Y, Ong AK (2017) A review identifying the effectiveness of minimum quantity lubrication (MQL) during conventional machining. Int J Adv Manuf Technol 92(1–4):321–340
Lopes JC, Ventura CE, Fernandes LM, Tavares AB, Sanchez LE, de Mello HJ, de Aguiar PR, Bianchi EC (2019) Application of a wheel cleaning system during grinding of alumina with minimum quantity lubrication. Int J Adv Manuf Technol 102(1–4):333–341
Lopes JC, de Martini Fernandes L, Domingues BB, Canarim RC, Fonseca MdPC, de Angelo Sanchez LE, de Oliveira RFM, de Mello HJ, Aguiar PR, Bianchi EC (2019) Effect of CBN grain friability in hardened steel plunge grinding. Int J Adv Manuf Technol 1–11
de Mello HJ, de Mello DR, Rodriguez RL, Lopes JC, da Silva RB, de Angelo Sanchez LE, Hildebrandt RA, Aguiar PR, Bianchi EC (2018) Contribution to cylindrical grinding of interrupted surfaces of hardened steel with medium grit wheel. Int J Adv Manuf Technol 95(9–12):4049–4057
Chuang T-j, Jahanmir S, Tang HC (2003) Finite element simulation of straight plunge grinding for advanced ceramics. J Eur Ceram Soc 23(10):1723–1733
Gao K, Chen H, Zhang X, Ren X, Chen J, Chen X (2019) A novel material removal prediction method based on acoustic sensing and ensemble XGBoost learning algorithm for robotic belt grinding of Inconel 718. Int J Adv Manuf Technol 105(1–4):217–232
Chen J, Chen H, Xu J, Wang J, Zhang X, Chen X (2018) Acoustic signal-based tool condition monitoring in belt grinding of nickel-based superalloys using RF classifier and MLR algorithm. Int J Adv Manuf Technol 98(1–4):859–872
Wilson JM, Piya C, Shin YC, Zhao F, Ramani K (2014) Remanufacturing of turbine blades by laser direct deposition with its energy and environmental impact analysis. J Clean Prod 80:170–178
Baptista R, Infante V, Branco C (2008) Study of the fatigue behavior in welded joints of stainless steels treated by weld toe grinding and subjected to salt water corrosion. Int J Fatigue 30(3):453–462
Jin Y (2019) Price M Study on Belt Grinding Performance of Electron Beam Weld of Titanium Alloy. In: Advances in Manufacturing Technology XXXIII: Proceedings of the 17th International Conference on Manufacturing Research, incorporating the 34th National Conference on Manufacturing Research, 10–12 September 2019, Queen's University, Belfast. IOS Press, p 364
Denkena B, Boess V, Nespor D, Floeter F, Rust F (2015) Engine blade regeneration: a literature review on common technologies in terms of machining. Int J Adv Manuf Technol 81(5–8):917–924
Huang H, Gong Z, Chen X, Zhou L (2002) Robotic grinding and polishing for turbine-vane overhaul. J Mater Process Technol 127(2):140–145
Sun Y, Giblin DJ, Kazerounian K (2009) Accurate robotic belt grinding of workpieces with complex geometries using relative calibration techniques. Robot Comput Integr Manuf 25(1):204–210
Li X, Rong Y (2011) Framework of grinding process modeling and simulation based on microscopic interaction analysis. Robot Comput Integr Manuf 27(2):471–478
Xu X, Chu Y, Zhu D, Yan S, Ding H (2019) Experimental investigation and modeling of material removal characteristics in robotic belt grinding considering the effects of cut-in and cut-off. Int J Adv Manuf Technol 1–17
Qu C, Lv Y, Yang Z, Xu X, Zhu D, Yan S (2019) An improved chip-thickness model for surface roughness prediction in robotic belt grinding considering the elastic state at contact wheel-workpiece interface. Int J Adv Manuf Technol 104(5–8):3209–3217
Han G, Sun M (2008) Optimum path planning of robotic free abrasive polishing process. In: International Conference on Intelligent Robotics and Applications. Springer, pp 906–915
Wei W, Chao Y (2011) A path planning method for robotic belt surface grinding. Chin J Aeronaut 24(4):520–526
Bian Y, Zhang Y, Gao Z (2013) A path planning method of robotic belt grinding system for grinding workpieces with complex shape surfaces. Paper presented at the international conference on emerging trends in engineering and technology (ICETET), Thailand
Huang H, Zhou L, Chen X, Gong Z (2003) SMART robotic system for 3D profile turbine vane airfoil repair. Int J Adv Manuf Technol 21(4):275–283
Yilmaz O, Gindy N, Gao J (2010) A repair and overhaul methodology for aeroengine components. Robot Comput Integr Manuf 26(2):190–201
Li L, Li C, Tang Y, Du Y (2017) An integrated approach of reverse engineering aided remanufacturing process for worn components. Robot Comput Integr Manuf 48:39–50
Zhang G, Wang J, Cao F, Li Y, Chen X (2016) 3D curvature grinding path planning based on point cloud data. In: 2016 12th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA). IEEE, pp 1–6
Li Y, Chen H, Xi N (2017) Automatic Programming for Robotic Grinding Using Real Time 3D Measurement. In: 2017 IEEE 7th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER). IEEE, pp 803–808
Liska J, Vanicek O, Chalus M (2018) Hand-Eye Calibration of a Laser Profile Scanner in Robotic Welding. In: 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). IEEE, pp 316–321
Chen Q (2007) Airborne lidar data processing and information extraction. Photogramm Eng Remote Sens 73(2):109
Chen J, Paris S, Durand F (2007) Real-time edge-aware image processing with the bilateral grid. In: ACM Transactions on Graphics (TOG), vol 3. ACM, p 103
Sithole G, Vosselman G (2005) Filtering of airborne laser scanner data based on segmented point clouds. International archives of photogrammetry, remote sensing and spatial information sciences 36 (part 3):W19
Lee I-C, Wu B, Li R (2009) Shoreline extraction from the integration of lidar point cloud data and aerial orthophotos using mean-shift segmentation. In: Annual Conference Baltimore, Maryland, ASPRS
Balta H, Velagic J, Bosschaerts W, De Cubber G, Siciliano B (2018) Fast statistical outlier removal based method for large 3D point clouds of outdoor environments. IFAC-PapersOnLine 51(22):348–353
Ebrahim MA-B (2015) 3D laser scanners’ techniques overview. Int J Sci Res 4(10):323–331
Han X-F, Jin JS, Wang M-J, Jiang W, Gao L, Xiao L (2017) A review of algorithms for filtering the 3D point cloud. Signal Process Image Commun 57:103–112
Ioannou Y, Taati B, Harrap R, Greenspan M (2012) Difference of normals as a multi-scale operator in unorganized point clouds. In: 2012 Second International Conference on 3D Imaging, Modeling, Processing, Visualization & Transmission. IEEE, pp 501–508
Valero S, Chanussot J, Benediktsson JA, Talbot H, Waske B (2010) Advanced directional mathematical morphology for the detection of the road network in very high resolution remote sensing images. Pattern Recogn Lett 31(10):1120–1127
Clode S, Rottensteiner F, Kootsookos P, Zelniker E (2007) Detection and vectorization of roads from lidar data. Photogramm Eng Remote Sens 73(5):517–535
Le Saux B, Beaupère A, Boulch A, Brossard J, Manier A, Villemin G (2018) Railway Detection: From Filtering to Segmentation Networks. In: IGARSS 2018–2018 IEEE International Geoscience and Remote Sensing Symposium. IEEE, pp 4819–4822
Hu J, Razdan A, Femiani JC, Cui M, Wonka P (2007) Road network extraction and intersection detection from aerial images by tracking road footprints. IEEE Trans Geosci Remote Sens 45(12):4144–4157
Lin K, Chen Y, Qiu M, Zeng M, Huang W (2016) SLGC: a fast point-in-area algorithm based on scan-line algorithm and grid compression. In: 2016 11th International Conference on Computer Science & Education (ICCSE). IEEE, pp 352–356
Clayton MJ, Warden RB, Parker TW (2002) Virtual construction of architecture using 3D CAD and simulation. Autom Constr 11(2):227–235
Keller P, Hering-Bertram M, Hagen H (2012) Surface reconstruction from unorganized 3d point clouds. In: Reverse Engineering-Recent Advances and Applications. IntechOpen
Acknowledgements
The authors acknowledge the support from Guangzhou Risong Technology Co. Ltd.
Author information
Authors and Affiliations
Corresponding authors
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Wang, X., Zhang, X., Ren, X. et al. Point cloud 3D parent surface reconstruction and weld seam feature extraction for robotic grinding path planning. Int J Adv Manuf Technol 107, 827–841 (2020). https://doi.org/10.1007/s00170-020-04947-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-020-04947-1