
Abstract
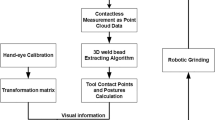
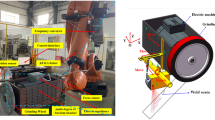
In robot grinding, the path planning has always been the main factor affecting the grinding efficiency. To improve the accuracy and automation level of robot grinding, a novel path planning method based on workpiece point cloud is proposed for the grinding of weld seam on curved surface. First, the point cloud of workpiece is obtained by the binocular structured light camera. After data preprocessing, this paper presents a novel approach of tangent planes determination based on the idea of point cloud slicing, which involves 3D projection and image binary extraction. Second, an approach for extracting the weld feature points is proposed based on the deviation term. By calculating the intersecting points between tangent planes and workpiece point cloud, this approach identifies the weld profile and extracts the feature points located in weld center. Then, to reduce the vibration in grinding, the feature points are polynomial fitted to generate a continuous weld grinding path, and a method of posture planning for grinding tool is presented based on grinding tool model and grinding process. Finally, this paper builds the “robot + 3D vision” platform and designs the grinding actuator, the effectiveness of this proposed method is verified by experiments.





























Similar content being viewed by others

References
Wang X, Zhou X, Xia Z, Gu X (2021) A survey of welding robot intelligent path optimization. J Manuf Process 63:14–23
Wang N, Zhong K, Shi X, Zhang X (2020) A robust weld seam recognition method under heavy noise based on structured-light vision. Robot Comput-Integr Manuf 61:101821
Nahavandi S, Uddin MJ, Nasu Y, Trinh H, Saadat M (2007) Automated robotic grinding by low-powered manipulator. Robot Comput-Integr Manuf 23(5):589–598
Bian Y, Zhang Y, Gao Z (2013) A path planning method of robotic belt grinding system for grinding workpieces with complex shape surfaces. International conference on emerging trends in engineering and technology, Thailand
Song HC, Kim BS, Song JB (2012) Tool path generation based on matching between teaching points and CAD model for robotic deburring. 2012 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Kaohsiung, Taiwan, pp 890–895. https://doi.org/10.1109/AIM.2012.6265921
Han G, Sun M (2008) Optimum path planning of robotic free abrasive polishing process. In: Xiong C, Liu H, Huang Y, Xiong Y (eds) Intelligent robotics and applications. ICIRA 2008. Lecture Notes in Computer Science, vol 5315. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-540-88518-4_97
Wei W, Chao Y (2011) A path planning method for robotic belt surface grinding. Chin J Aeronaut 24(4):520–526
Xie Y, Yang J, Huang W, Li J (2022) A tool-path planning method used in computer controlled optical surfacing based on improved prim algorithm. Int J Adv Manuf Technol 119(9-10):5917–5927
Wu W, Kong L, Liu W, Zhang C (2017) Laser sensor weld seams recognition and reconstruction for rail weld seams grinding robot. 2017 5th International Conference on Mechanical, Automotive and Materials Engineering (CMAME), Guangzhou, China, pp 143–148. https://doi.org/10.1109/CMAME.2017.8540113
Zhang G, Wang J, Cao F, Li Y, Chen X (2016) 3D curvature grinding path planning based on point cloud data. 2016 12th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA), Auckland, New Zealand, pp 1–6. https://doi.org/10.1109/MESA.2016.7587150
Li Y, Chen H, Xi N (2017) Automatic programming for robotic grinding using real time 3d measurement. 2017 IEEE 7th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Honolulu, HI, USA, pp 803–808. https://doi.org/10.1109/CYBER.2017.8446097
Feng H, Ren X, Li L, Zhang X, Chen H, Chai Z, Chen X (2021) A novel feature-guided trajectory generation method based on point cloud for robotic grinding of freeform welds. Int J Adv Manuf Technol 115(5):1763–1781
Wang X, Zhang X, Ren X, Li L, Feng H, He Y, Chen H, Chen X (2020) Point cloud 3D parent surface reconstruction and weld seam feature extraction for robotic grinding path planning. Int J Adv Manuf Technol 107(1):827–841
Zhou P, Peng R, Xu M, Wu V, Navarro-Alarcon D (2021) Path planning with automatic seam extraction over point cloud models for robotic arc welding. IEEE Robot Autom Lett 6(3):5002–5009
Yang L, Li E, Long T, Fan J, Liang Z (2018) A novel 3-D path extraction method for arc welding robot based on stereo structured light sensor. IEEE Sens J 19(2):763–773
Zhang L, Xu Y, Du S, Zhao W, Hou Z, Chen S (2018) Point cloud based three-dimensional reconstruction and identification of initial welding position. Transactions on Intelligent Welding Manufacturing (pp 61–77). Springer, Singapore. https://doi.org/10.1007/978-981-10-8330-3_4
Yang L, Liu Y, Peng J, Liang Z (2020) A novel system for off-line 3D seam extraction and path planning based on point cloud segmentation for arc welding robot. Robot Comput-Integr Manuf 64:101929
Gao J, Li F, Zhang C, He W, He J, Chen X (2021) A Method of D-Type Weld Seam Extraction Based on Point Clouds. IEEE Access 9:65401–65410
Zhou QY, Park J, Koltun V. (2018) Open3D: A modern library for 3D data processing. arXiv preprint arXiv:1801.09847.
Alexa M, Behr J, Cohen-Or D, Fleishman S, Levin D, Silva CT (2003) Computing and rendering point set surfaces. IEEE Trans Visual Comput Graphics 9(1):3–15
Ren X, Chen G, Wang Z, Wang Z, Sun, L. (2020) Polishing path planning based on point cloud. In: Proceedings of the 2020 the 4th international conference on innovation in artificial intelligence (ICIAI '20) (pp 222–228). Association for Computing Machinery, New York, NY, USA. https://doi.org/10.1145/3390557.3394314
Canny J (1986) A Computational Approach to Edge Detection. IEEE Trans Pattern Anal Mach Intell 8(6):679–698
Jin J (2000) Controllable step size interpolation method for arbitrary spatial curve in machine CNC system. Chin J Mech Eng 4:95–97
Joshi K, Melkote SN, Anderson M, Chaudhari R (2021) Investigation of cycle time behavior in the robotic grinding process. CIRP J Manuf Sci Technol 35:315–322
Agnard S, Hazel B, Liu Z (2018) Study of grinding tool profiling for robotic processes. Mach Sci Technol 22(2):203–224
Szybicki D, Burghardt A, Kurc K, Gierlak P (2020) Device for contact measurement of turbine blade geometry in robotic grinding process. Sensors 20(24):7053
Acknowledgements
The authors gratefully thank the National Natural Science Foundation of China under Grant No.62103234 and No.62303276, the project ZR2021QF027 and ZR2022QF031 supported by Shandong Provincial Natural Science Foundation.
Funding
This work was supported by the National Natural Science Foundation of China (Grant numbers [62103234] and [62303276]), Shandong Provincial Natural Science Foundation (Grant numbers [ZR2021QF027] and [ZR2022QF031].
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Platform construction, data collection were performed by [Yan Liu], [Shuai Yang]. Data analysis and Material preparation were performed by [Qiu Tang]. The first draft of the manuscript was written by [Yan Liu], [Shuai Yang]. [Xincheng Tian] involved in all aspects of the paper preparation and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Liu, Y., Yang, S., Tang, Q. et al. A novel path planning method of robotic grinding for free-form weld seam based on 3D point cloud. Int J Adv Manuf Technol 131, 5155–5176 (2024). https://doi.org/10.1007/s00170-024-13247-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-024-13247-x