
Abstract
This paper presents an optimization approach for design of tensegrity structures based on graph theory. The formulation obtains tensegrities from ground structures, through force maximization using mixed integer linear programming. The method seeks a topology of the tensegrity that is within a given geometry, which provides insight into the tensegrity design from a geometric point of view. Although not explicitly enforced, the tensegrities obtained using this approach tend to be both stable and symmetric. Borrowing ideas from computer graphics, we allow “restriction zones” (i.e., passive regions in which no geometric entity should intersect) to be specified in the underlying ground structure. Such feature allows the design of tensegrities for actual engineering applications, such as robotics, in which the volume of the payload needs to be protected. To demonstrate the effectiveness of our proposed design method, we show that it is effective at extracting both well-known tensegrities and new tensegrities from the ground structure network, some of which are prototyped with the aid of additive manufacturing.

















Similar content being viewed by others


Notes
The examples in this paper are solved by the optimization software Gurobi 6.5 (Gurobi Optimization 2014) executed by a MATLAB code. The code is operating on a desktop with an 8-core 3.0 GHz Intel Xeon CPU. It is also possible to use other solvers such as the MATLAB built-in function “intlinprog” to solve the problem.
System 30M, HYREL 3D Inc, Norcross, GA, USA
NINJATEK, Manheim, PA, USA
References
Bendsøe M, Sigmund O (2003) Topology optimization: theory, methods and applications. Springer
Calladine CR (1978) Buckminster Fuller’s tensegrity structures and Clerk Maxwell’s rules for the construction of stiff frames. Int J Solids Struct 14:161–172
Caluwaerts K, Despraz J, Işçen A, Sabelhaus AP, Bruce J, Schrauwen B, SunSpiral V (2014) Design and control of compliant tensegrity robots through simulation and hardware validation. J Royal Soc Interface 11(98):1–13
Connelly R (1995) Globally rigid symmetric tensegrities. Struct Topol 21:59–78
Connelly R (1999) Tensegrity structures: why are they stable? In: Thorpe MF, Duxbury PM (eds) Rigidity theory and applications. Kluwer Academic, pp 47–54
Connelly R, Whiteley W (1996) Second-order rigidity and prestress stability for tensegrity frameworks. SIAM J Discret Math 9(3):453–491
Dorn WS, Gomory RE, Greenberg HJ (1964) Automatic design of optimal structures. J de Mecanique 3(1):25–52
Ehara S, Kanno Y (2010) Topology design of tensegrity structures via mixed integer programming. Int J Solids Struct 47(5):571–579
Felix JJ, Vanderplaats GN (1987) Configuration optimization of trusses subject to strength, displacement and frequency constraints. J Mechs Trans Autom Des 109(2):233–241
Fuller RB (1962) Tensile-integrity structures. United States Patent 3063521
Godsil C, Royle GF (2001) Algebraic graph theory. Springer, New York
Guest SD (2000) Tensegrities and rotating rings of tetrahedra: a symmetry viewpoint of structural mechanics. Philos Trans R Soc London A 358(1765):229–243
Guest S (2006) The stiffness of prestressed frameworks: a unifying approach. Int J Solids Struct 43(3-4):842–854
Guest SD (2011) The stiffness of tensegrity structures. IMA J Appl Math 76:57–66
Gurobi Optimization (2014) Gurobi optimizer reference manual. Houston TX: Gurobi Optimization Inc., 6.0 ed
Hanaor A (2012) Debunking tensegrity - a personal perspective. Int J Space Struct 27(2&,3):179–183
Hanaor BA, Liao M-K (1991) Double-layer tensegrity grids: static load response I: analytical study. J Struct Eng 117(6):1660–1674
Heartney E, Snelson K (2009) Kenneth snelson: forces made visible. Hudson Hills
Ingber DE (1998) The architecture of life. Sci Am 278(1):48–57
Kanno Y (2012) Topology optimization of tensegrity structures under self-weight loads. J Oper Res Soc Jpn 55(2):125–145
Kanno Y (2013a) Topology optimization of tensegrity structures under compliance constraint. A mixed integer linear programming approach. Optim Eng 14(1):61–96
Kanno Y (2013b) Exploring new tensegrity structures via mixed integer programming. Struct Multidiscip Optim 48(1):95–114
Lee S, Lee J (2016) Advanced automatic grouping for form-finding of tensegrity structures. Struct Multidiscip Optim 55(3):959– 968
Li Y, Feng X-Q, Cao Y-P, Gao H (2010a) Constructing tensegrity structures from one-bar elementary cells. Proc R Soc A 466(2113):45–61
Li Y, Feng X-Q, Cao Y-P, Gao H (2010b) A Monte Carlo form-finding method for large scale regular and irregular tensegrity structures. Int J Solids Struct 47(14-15):1888–1898
Liu K, Wu J, Paulino GH, Qi HJ (2017) Programmable deployment of tensegrity structures by stimulus-responsive polymers. Sci Rep 7:3511
Manhattan (2018) Skwish. Image retrieved from: https://www.manhattantoy.com/collections/skwish/products/skwish-natural
Moored KW, Kemp TH, Houle NE, Bart-Smith H (2011) Analytical predictions, optimization, and design of a tensegrity-based artificial pectoral fin. Int J Solids Struct 48(22-23):3142–3159
Motro R (2006) Tensegrity: structural systems for the future. Elsevier
Ohsaki M, Zhang J (2015) Nonlinear programming approach to form-finding and folding analysis of tensegrity structures using fictitious material properties. Int J Solids Struct 69-70:1–10
Pellegrino S (1992) A class of tensegrity domes. Int J Space Struct 7:127–142
Rimoli JJ, Pal RK (2016) Mechanical response of 3-dimensional tensegrity lattices. Compos Part B: Eng 115:30–42
Rhode-Barbarigos L-G-A (2012) An active deployable tensegrity structure. PhD thesis, École Polytechnique Fėdėrale de Lausanne
Schenk M, Guest SD, Herder JL (2007) Zero stiffness tensegrity structures. Int J Solids Struct 44 (20):6569–6583
Skelton RE, de Oliveira M (2009) Tensegrity systems. Springer, US
Smith ODS (1998) Generation of ground structures for 2D and 3D design domains. Eng Comput 15(4):462–500
Snelson K (2012) The art of tensegrity. Int J Space Struct 27(2-3): 71–80
Sultan C (1999) Modeling, design, and control of tensegrity structures with applications. PhD thesis, Purdue University
Taubin G (1994) An accurate algorithm for rasterizing algebraic curves and surfaces. IEEE Comput Graph Appl 14:14–23
Tachi T (2013) Interactive freeform design of tensegrity. In: Hesselgren L, Sharma S, Wallner J, Baldassini N, Bompas P, Raynaud J (eds) Advances in architectural geometry 2012. Springer, Vienna, pp 259–268
Tibert AG (2002) Deployable tensegrity structures for space applications. PhD thesis, Royal Institute of Technology
Williamson D, Skelton RE (2003) General class of tensegrity structures: topology and prestress equilibrium analysis. J Guid Control Dyn 26(5):685–694
Xu X, Wang Y, Luo Y, Asce AM (2016) General approach for topology-finding of tensegrity structures. J Struct Eng 142(10):04016061
Zhang JY, Ohsaki M (2015) Tensegrity structures - form, stability, and symmetry. Springer, Japan
Zhang JY, Ohsaki M (2006) Adaptive force density method for form-finding problem of tensegrity structures. Int J Solids Struct 43(18-19):5658–5673
Zhang L, Maurin B, Motro R (2006) Form-finding of nonregular tensegrity systems. J Struct Eng 132 (9):1435–1440
Zhang JY, Guest SD, Ohsaki M (2009) Symmetric prismatic tensegrity structures: part I. Configuration and stability. Int J Solids Struct 46(1):1–14
Zhang X, Ramos AS Jr, Paulino GH (2017) Material nonlinear topology optimization using the ground structure method with a discrete filtering scheme. Struct Multidiscip Optim 55:2045– 2072
Zegard T, Paulino GH (2015) GRAND3 - Ground structure based topology optimization for arbitrary 3D domains using MATLAB. Struct Multidiscip Optim 52:1161–1184
Acknowledgements
The authors would like to extend their appreciation to Dr. Tomas Zegard and Ms. Emily D. Sanders for helpful discussions which contributed to improve the present work and to Mr. Rob Felt for taking photos of the physical models.
Funding
This study received support from the US NSF (National Science Foundation) through Grants 1538830 and 1321661. In addition, Ke Liu received support from the China Scholarship Council (CSC). We are grateful to the support provided by the Raymond Allen Jones Chair at the Georgia Institute of Technology.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Disclaimer
The information presented in this paper is the sole opinion of the authors and does not necessarily reflect the views of the sponsoring agencies.
Additional information
Responsible Editor: Anton Evgrafov
Dedicated to the memory of Mr. Kenneth Snelson (1927–2016).
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1: On reproducing known tensegrities: a verification study
One of the most well-known types of tensegrity is the prismatic tensegrity. This type of tensegrity has various configurations, but all of them obey the dihedral symmetry. A systematic study of the configuration and stability of the prismatic tensegrity can be found in the literature (Ohsaki and Zhang 2015; Zhang et al. 2009). The nodes of a prismatic tensegrity are located on the vertices of a twisted prism with each base face being a regular N-gon. The N vertices of the N-gon are incident on a circle. The twisting angle between the two parallel base faces is denoted as α, as shown in Fig. 18.

The geometry and generation of a twisted prism. a The base polygon laid on the top circle B is obtained by rotating the same polygon on the bottom circle A with an angle α. b The top view of the twisting of the hexagonal base
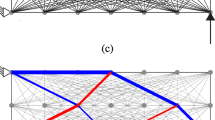
We first generate the ground structure based on the twisted prism with full connectivity between nodes. The prism has a height of 1.0 (i.e., h = 1), and the radius of the outline circle of the base polygon is also 1 (i.e., r = 1). The results are shown in Fig. 19 for different geometries of the twisted prism. All of the results are super-stable, which has been proved analytically by Ohsaki and Zhang (2015) and Zhang et al. (2009).

Examples of prismatic tensegrities that are reproduced using the proposed method. Different base polygons are used to generate the twisted prism geometries: a–f For N-gon-based twisted prism, α = π/N if N is even, and α = π/2N if N is odd. Quantitative data is provided in Table 4
There is another family of tensegrity that has similar configurations to the prismatic tensegrities, namely the symmetric star-shaped tensegrity (Zhang and Ohsaki 2015), which also satisfies the dihedral symmetry. The difference is that a star-shaped tensegrity structure has two additional nodes lying on the centroids of the base faces. Therefore, in a prismatic tensegrity structure, there is essentially only one type of node, but in a star-shaped tensegrity, there are two types of nodes. To reproduce the known star-shaped tensegrities, we generate the ground structure using the nodes on the vertices of the twisted prism and the two additional nodes at the centroids of the top and bottom faces. Figure 20 shows a few examples of reproduced star-shaped tensegrities.

Examples of star-shaped tensegrities that are reproduced using the proposed method. Different base polygons are used to generate the twisted prism geometries: a–c Compared to the prismatic tensegrities, the initial ground structures have two more nodes that are located at the centroids of the two base polygons. Quantitative data is provided in Table 5
Appendix 2: An illustrative example of the topological constraints
We use the following example to illustrate how the topological constraint and physical constraint work. Suppose we have a ground structure as shown in Fig. 21a. Label the vertices from A to F and edges from 1 to 9. Based on the given topology, we can construct the topological constraint matrix G as:
The rows of the matrix correspond to the connectivity information at nodes A to F. The columns contain the connectivity information of members 1 through 9. For example, the third row shows that members 2, 3, and 9 are connected to node C. Furthermore, since members 7, 8, and 9 intersect at one point, we have the physical constraint matrix Gp reads:
As discussed before, the coincident intersection point is split into three fictitious intersection points.

a A simple ground structure with 6 nodes and 9 members. b The collection of members 1 and 2 in the ground structure. The two members are connected at node B. c Members 7 and 8 are contacting each other in the middle, indicating a conflict in space
Suppose we have a collection of members from the ground structure represented by the binary vector x whose k th entry reflects the presence of member k in the collection. Let x1 = [1, 1, 0, 0, 0, 0, 0, 0, 0]T meaning that members 1 and 2 are in the collection as shown in Fig. 21b. The matrix vector multiplication Gx1 gives [1, 2, 1, 0, 0, 0]T which clearly shows that there are two members in the collection connected to node B. If the constraint is set for Class-1 tensegrity and the collection x1 represents the struts, x1 will violate the topological discontinuity constraint. To show how the physical constraint works, we set x2 = [0, 0, 0, 0, 0, 0, 1, 1, 0]T, which contains members 7 and 8, as shown in Fig. 21c. The linear operation Gpx2 produces [2, 1, 1] with first component larger than 1 indicating a violation. Thus, the physical constraint successfully shows that members 7 and 8 cannot exist at the same time.
Appendix 3: Basic structural analysis of tensegrity structures
The construction of the stiffness matrix for a tensegrity structure is different from a normal truss due to the presence of prestress forces. Detailed derivations and discussions can be found in Guest (2006, 2011) and Zhang and Ohsaki (2015). Here, we briefly summarize the key ideas. The basic assumptions here are that both struts and cables are rectilinear members made of materials that have linear elastic constitutive relationships, and the strains in the members are always small. The geometric stiffness matrix formulation adopted here is an incomplete version that is accurate for small strain analysis. Indeed, the present expression for KG is called the “stress matrix” (Connelly 1999), which is part of the complete geometric stiffness matrix (Guest 2011).
Assume the cross-sectional area, length, and Young’s modulus of member i are Ai, Li, and Ei, respectively. The coordinates of node j are stored in the vector pj. First, let us define the modified incidence matrix C. In graph theory, the incidence matrix is binary (like the matrix G in (5c)), but here, the modified matrix is composed of 0’s, 1’s, and − 1’s. Suppose member i links nodes a and b. Then, C is defined as:
The size of the modified incidence matrix C is NE × NV. Then, the augmented incidence matrix that connects the degrees of freedom to the members is defined as:
where ⊗ means the Kronecker product, so that Caug has size NE × 3NV. The vector 1 is a vector of ones. The total number of degrees of freedom in the structure is 3NV because we are considering three-dimensional space. We assemble all the nodal coordinates (i.e., pj’s) in a vector p by blocks of 3 components. We obtain the equilibrium matrix as:
where P = diag(p), with its diagonal entries containing all the nodal coordinates, and L being a diagonal matrix of member lengths. We define another diagonal matrix D of size NE × NE, such that
Then, the linear stiffness matrix KE of a tensegrity is given as:
which is a symmetric matrix with 3NV rows and 3NV columns. By assuming that the prestress force in member i is Fi, we define a diagonal matrix Q as:
The ratio Fi/Li is known as the force density. The so-called force density matrix (Zhang and Ohsaki 2015) (or reduced stress matrix; Connelly 1999; Schenk et al. 2007) is then formed by:
which is of size NV × NV. Then, the geometrical stiffness matrix is constructed by:
where I is the identity matrix. Finally, the tangent stiffness matrix of a tensegrity is the summation of the linear stiffness matrix and the geometrical stiffness matrix:
Appendix 4: Nomenclature
- 1 :
-
Vector of ones
- B :
-
Equilibrium matrix
- F :
-
Member forces
- G :
-
Incidence matrix
- G p :
-
Physical contact matrix
- K :
-
Tangent stiffness matrix
- K E :
-
Linear elastic stiffness matrix
- K G :
-
Geometrical stiffness matrix
- p :
-
Coordinates of nodes, 3N × 1 vector
- s :
-
A binary vector for the presence of struts
- u :
-
Displacement of nodes, a perturbation on p
- u M :
-
First-order mechanisms of the dual truss of a tensegrity
- E:
-
Edges of a graph
- e:
-
An edge (member)
- E g :
-
Edges of the ground structure
- G:
-
A graph
- H, K:
-
Symmetry groups
- hi, ki:
-
Symmetry operations
- n, n:
-
Level of discontinuity of struts
- N I :
-
Number of active integer variables
- n r :
-
Number of rigid-body motions
- \(N_{E_{g}}\) :
-
Number of members in the ground structure
- N E :
-
Number of members in the obtained tensegrity
- \(N_{V_{g}}\) :
-
Number of nodes in the ground structure
- N V :
-
Number of nodes in the obtained tensegrity
- T o p t :
-
Running time of the optimization
- V:
-
Vertices of a graph
- v:
-
A vertex (node)
- V g :
-
Vertices of the ground structure
- KI:
-
Kinematic indeterminacy
Rights and permissions
About this article

Cite this article
Liu, K., Paulino, G.H. Tensegrity topology optimization by force maximization on arbitrary ground structures. Struct Multidisc Optim 59, 2041–2062 (2019). https://doi.org/10.1007/s00158-018-2172-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00158-018-2172-3