
Abstract
In this study, we propose a sequential convex programming (SCP) method that uses an enhanced two-point diagonal quadratic approximation (eTDQA) to generate diagonal Hessian terms of approximate functions. In addition, we use nonlinear programming (NLP) filtering, conservatism, and trust region reduction to enforce global convergence. By using the diagonal Hessian terms of a highly accurate two-point approximation, eTDQA, the efficiency of SCP can be improved. Moreover, by using an appropriate procedure using NLP filtering, conservatism, and trust region reduction, the convergence can be improved without worsening the efficiency. To investigate the performance of the proposed algorithm, several benchmark numerical examples and a structural topology optimization problem are solved. Numerical tests show that the proposed algorithm is generally more efficient than competing algorithms. In particular, in the case of the topology optimization problem of minimizing compliance subject to a volume constraint with a penalization parameter of three, the proposed algorithm is found to converge well to the optimum solution while the other algorithms tested do not converge in the maximum number of iterations specified.


Similar content being viewed by others
References
Alexandrov N M, Dennis J E, Lewis R M, Torczon V (1998) A trust-region framework for managing the use of approximation models in optimization. Struct Optim 15:16–23
Bendsøe M P, Sigmund O (2003) Topology optimization: theory, methods and applications. Springer, Berlin; New York
Bruyneel M, Duysinx P, Fleury C (2002) A family of MMA approximations for structural optimization. Struct Multidiscip O 24:263–276
Chickermane H, Gea H C (1996) Structural optimization using a new local approximation method. Int J Numer Meth Eng 39:829– 846
Conn A R, Gould N I M, Toint P L (2000) Trust-region methods. PA, Philadelphia
Duysinx P, Nguyen V H, Bruyneel M, Fleury C (2001) Estimating diagonal second order terms in structural approximations with quasi-Cauchy techniques. In: 4th World congress of structural and multixisciplinary optimization, Dalian China
Fadel G M, Riley M F, Barthelemy J M (1990) Two point exponential approximation method for structural optimization. Struct Optim 2:117–124
Falk J E (1967) Lagrange Multipliers and Nonlinear Programming. J Math Anal Appl 19:141-&
Fletcher R, Gould N I M, Leyffer S, Toint P L, Wachter A (2003) Global convergence of a trust-region SQP-filter algorithm for general nonlinear programming. Siam J Optimiz 13:635–659
Fletcher R, Leyffer S, Toint P L (2002) On the global convergence of a filter SQP algorithm. Siam J Optimiz 13:44–59
Fleury C (1979) Structural weight optimization by dual methods of convex programming. Int J Numer Meth Eng 14:1761–1783
Fleury C (1989) CONLIN: an efficient dual optimizer based on convex approximation concepts. Struct Optim 1:81–89
Fleury C, Braibant V (1986) Structural Optimization - a New Dual Method Using Mixed Variables. Int J Numer Meth Eng 23:409–428
Groenwold A A, Etman L F P (2010) A quadratic approximation for structural topology optimization. Int J Numer Meth Eng 82:505–524
Groenwold A A, Etman L F P (2010a) On the conditional acceptance of iterates in SAO algorithms based on convex separable approximations. Struct Multidiscip O 42:165–178
Groenwold A A, Etman L F P, Snyman J A, Rooda J E (2007) Incomplete series expansion for function approximation. Struct Multidiscip O 34:21–40
Groenwold A A, Etman L F P, Wood D W (2010) Approximated approximations for SAO. Struct Multidiscip O 41:39–56
Groenwold A A, Wood D W, Etman L F P, Tosserams S (2009) Globally convergent optimization algorithm using conservative convex separable diagonal quadratic approximations. Aiaa J 47:2649–2657
Kelley C T (1999) Iterative methods for optimization. SIAM, Philadelphia
Kim J R, Choi D H (2008) Enhanced two-point diagonal quadratic approximation methods for design optimization. Comput Method Appl M 197:846–856
Park S H, Choi D H (2011) A new convex separable approximation based on two-point diagonal quadratic approximation for large-scale structural design optimization. In: 9th World congress on structural and multidisciplinary optimization. Shizuoka, Japan
Sigmund O (1997) On the design of compliant mechanisms using topology optimization. Mech Struct Mach 25:493–524
Svanberg K (1987) The Method of moving asymptotes - a new method for structural optimization. Int J Numer Meth Eng 24:359–373
Svanberg K (2002) A class of globally convergent optimization methods based on conservative convex separable approximations. Siam J Optimiz 12:555–573
Vanderplaats G N (1984) Numerical optimization techniques for engineering design: with applications. McGraw-Hill, New York
Wang L P, Grandhi R V (1994) Efficient safety index calculation for structural reliability-analysis. Comput Struct 52:103–111
Wang L P, Grandhi R V (1995) Improved two-point function approximation for design optimization. Aiaa J 33:1720– 1727
Wang L P, Grandhi R V (1996) Multipoint approximations: Comparisons using structural size, configuration and shape design. Struct Optimization 12:177–185
Wang L P, Grandhi R V, Canfield R A (1996) Multivariate hermite approximation for design optimization. Int J Numer Meth Eng 39:787–803
Xu G, Yamazaki K, Cheng G D (2000) A new two-point approximation approach for structural optimization. Struct Multidiscip O 20:22–28
Xu S Q, Grandhi R V (1998) Effective two-point function approximation for design optimization. Aiaa J 36:2269–2275
Zhang W H, Fleury C (1997) A modification of convex approximation methods for structural optimization. Comput Struct 64:89–95
Zillober C (1993) A globally convergent version of the method of moving asymptotes. Struct Optimization 6:166–174
Zillober C (2001) A combined convex approximation-interior point approach for large scale nonlinear programming. Optim Eng 2:51–73
Zillober C, Schittkowski K, Moritzen K (2004) Very large scale optimization by sequential convex programming. Optim Method Softw 19:103–120
Acknowledgments
This work was supported by the National Space Lab (NSL) program through the National Research Foundation (NRF) of Korea funded by the Ministry of Science, ICT and Future Planning (No. 2013042240) and by the NRF grant funded by the Korean government (No. 2013031530).
Author information
Authors and Affiliations
Corresponding author
Additional information
This paper is based on previous papers entitled “A new convex separable approximation based on two-point diagonal quadratic approximation for large-scale structural design optimization,” presented at the 9th World Congress on Structural and Multidisciplinary Optimization, 13–17 June 2011, Shizuoka, Japan, and “A filtered sequential approximate optimization algorithm based on dual subproblems using an enhanced two-point diagonal quadratic approximation for structural optimization,” presented at the 14th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, 17–19 September 2012, Indianapolis, Indiana, USA.
Appendix: The test problems
Appendix: The test problems
1.1 A.1 Shape and size design of a two-bar truss
This problem was proposed by Svanberg (1987). The problem can be mathematically stated as
The initial point is x 0=(1.0,1.0)T.
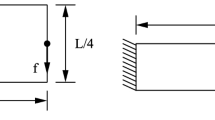
1.2 A.2 Vanderplaats’ cantilever beam
This problem was proposed by Vanderplaats (1984). The optimization problem is to minimize the volume of a p-segmented cantilever beam with constraints on the maximum stress of each segment and the tip deflection. A cantilever beam with five segments is depicted below. The cantilever beam has a rectangular cross-section, and the width and height of each segment are selected as design variables. The optimization problem is formulated as

1.3 A.3 Svanberg’s five-variate cantilever beam
This optimization problem was proposed by Svanberg (1987). The sizing design variables are considered to minimize weight subject to a single displacement constraint. The optimization problem is formulated as
The initial point is x 0=(5.0,5.0,5.0,5.0,5.0)T.
1.4 A.4 Fleury’s weight-minimization-like problem
This problem was proposed by Fleury (1979). The optimization problem is formulated as
The initial point is \(x_{i}^{0} =10^{-5}\). The optimum point is known to be \(x_{i}^{\ast } =1\) for i=1,2,⋯ ,950 and \(x_{i}^{\ast } =10^{-6}\)for i=951,952,⋯ ,1000 with f 0(x ∗)=950.0005. We set the move limit of the first outer iteration to 0.01 as Groenwold and Etman (2010a) did.
1.5 A.5 MBB beam topology optimization
The classical topology optimization problem for the Messerschmitt-Bolkow-Blöhm (MBB) beam to minimize compliance with a volume constraint is shown below. The design domain is discretized by the plane stress element, and the popular solid isotropic material with penalization (SIMP) scheme is used for this problem. A detailed description of the MBB problem is given by Bendsøe and Sigmund (2003).

The optimization problem can be stated as
where x e , u, K, and f represent the eth design variable representing density, the displacement vector, the global stiffness matrix assembled by an interpolated element stiffness matrix \(x_{e}^{p} k_{e} \), and the external force applied, respectively. The eth element displacement vector and desired volume fraction are denoted as u e and f, respectively. The sensitivity of the objective function with respect to the eth design variable can be represented as
For finite element analysis, the standard element known as ‘Q4’ is used, a four-node membrane based on isoparametric displacement. Furthermore, to avoid the checkerboard problem, the sensitivity filter proposed by Sigmund (1997) is used with the filter radius set to 8 % of the beam height.
Rights and permissions
About this article

Cite this article
Park, S., Jeong, S.H., Yoon, G.H. et al. A globally convergent sequential convex programming using an enhanced two-point diagonal quadratic approximation for structural optimization. Struct Multidisc Optim 50, 739–753 (2014). https://doi.org/10.1007/s00158-014-1084-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00158-014-1084-0