
Abstract
We propose a new digital-to-analog converter (DAC) for realizing a synapse circuit in mixed-signal spiking neural networks. We refer to this circuit as a “time-domain DAC (TDAC)”. It produces weights for converting a digital input code into voltage using one current waveform. Therefore, the TDAC is more compact than a conventional DAC consisting of many current sources and resistors. Moreover, a TDAC with leak resistance reproduces biologically plausible synaptic responses expressed as alpha functions or dual exponential equations. We also present numerical analysis results for a TDAC and circuit simulation results for a circuit designed using the TSMC 40 nm CMOS process.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Application-specific integrated circuits (ASICs) for neuromorphic hardware have been studied intensively with the aim of achieving highly efficient computation [2, 5, 11, 18, 20, 25]. Although most neuromorphic hardware is designed with digital circuits [2, 4, 8,9,10, 12, 22], some studies have sought higher efficiency by using analog circuits [11, 18] owing to the advantage that highly efficient multiply-accumulate (MAC) operations can be achieved.
Neuromorphic computation requires many MAC operations for the input signals and synaptic weights, and therefore, implementation of highly efficient MAC operations is important for realizing highly efficient neuromorphic hardware. To improve the energy efficiency of MAC operations, attempts have been made to (i) binarize the synaptic weights, (ii) realize weighted summation using current (wired-sum), (iii) realize weighted summation using capacitors, and (iv) develop a method that combines (i) and (ii) or (i) and (iii).
Bankman et al. [5] realized a highly energy-efficient binary convolution neural network chip as a recognition processor. In the circuit, the synaptic weights express binary information and are stored in digital memory. The weighted summation is then calculated by converting the binary information into analog voltages. The capacitors on this chip for weighted summation work also as a digital-to-analog converter (DAC), and this circuit is categorized as a mixed-signal circuit. A mixed–signal circuit that has multi-bit synaptic weights requires a large footprint area and a large amount of energy for the DAC, but the chip developed by Bankman et al. has low power consumption because the synaptic weights are restricted to be binary and the weighted summation is realized by capacitance coupling.
Weighted summation by current is often used in analog neuromorphic hardware [11, 15, 21, 25, 28]. In such circuits, the current is produced by synapse circuits. Current-based summation is implemented very simply by connecting each of the metal lines of the synaptic output. In analog neuromorphic hardware, synaptic weights are often expressed by analog voltages that are maintained by capacitors. A circuit with this architecture is highly efficient, but it is difficult to reuse the capacitors that hold the synaptic weights because they cannot hold the weights for a long time due to charge leakage. To solve this problem, there have been many studies of synapse circuits that use analog memory [1, 6, 13, 23, 26]. However, many problems need to be solved in order to establish analog memory as a reliable technology. For example, ferroelectric random access memory (FeRAM) suffers from a parasitic charge trapping effect that degrades endurance [29]. Resistive random access memory (ReRAM) is expected as high-integration and high-speed memory, but it may exhibit stochastic switching behavior depending on the composition of the filaments, and this mechanism is still not well understood [7].
To realize highly efficient neuromorphic hardware with reusable synaptic weights that is fabricated using conventional complementary metal–oxide–semiconductor (CMOS) technology, synaptic weights of the circuit architecture can be stored in digital memory and MAC operations can be achieved by an analog circuit; in other words, a mixed-signal architecture is suitable. Realizing a mixed-signal circuit that has multi-bit synaptic weights is important for achieving on-chip learning, but it is difficult to realize high-integration and highly efficient neuromorphic hardware because conventional multi-bit DACs comprise many current-source circuits or resistor arrays, thereby necessitating a large footprint and high power consumption [14, 17]. It is especially difficult to implement a highly energy-efficient asynchronous spiking neural network (SNN) chip that has multi-bit synaptic weights because using one DAC per time division is difficult in an asynchronous system.

Principal circuits of conventional digital-to-analog converters (DACs): (a) resistor string type; (b) current array type; (c) capacitor array type; (d) R2R ladder type; (e) MOS ladder type
Figure 1 shows the principal circuits of conventional 4-bit DACs where \(S_{0}\)–\(S_{3}\) are the individual values of a bit code, \(V_{ref}\) is the reference voltage, \(I_{ref}\) is the reference current, \(V_{out}\) is the output voltage, and \(I_{out}\) is the output current. Most conventional DACs consist of circuit elements (CEs) for realizing the weight of the bit code (e.g., resistors, capacitors, and current sources) and switches. It is difficult to implement the resistor string type (Fig. 1(a)), the current array type (Fig. 1(b)), and the capacitor array type [3] (Fig. 1(c)) in highly integrated forms because in those cases the number of CEs increases exponentially as the DAC bit length n increases. However, the R2R ladder type [24] (Fig. 1(d)) and the MOS ladder type (Fig. 1(e)) are highly advantageous because the number of CEs increases only linearly with n. Based on Fig. 1, the CE components and their numbers are summarized in Table 1. Our work will be described later.
In general, resistors and capacitors necessitate a larger footprint than do transistors in CMOS technology, and the CEs are designed to have larger dimensions than transistors that consist of logic gates in order to reduce the influence of fabrication mismatch. Therefore, to implement high-integration and highly efficient mixed-signal SNN hardware with on-chip learning having multi-bit synaptic weights, a suitable DAC architecture is one with neither resistors nor capacitors, or one but with few CEs, the number of which does not increase with the number of bits.
Toward SNN hardware, we propose a new DAC circuit that weights each bit of digital memory by using a current (or voltage) waveform. This makes our DAC more compact than conventional ones, and we refer to this DAC as a “time-domain” DAC (TDAC). A TDAC has the advantages that (i) it can reproduce a postsynaptic potential (PSP) and (ii) its number of CEs is independent of the bit width. Herein, we present the results of numerical analysis of TDAC and circuit simulation.
This paper is organized as follows. In Sect. 2, we explain the principle of TDAC, and in Sect. 3, we present a numerical analysis. Circuit design of TDAC and circuit simulation results are shown in Sect. 4. Finally, we conclude the paper in Sect. 6.
2 Circuit Principle of Time-Domain Digital-to-Analog Converter
Figure 2a shows the TDAC principle in circuit form, and we explain the operation of a 4-bit TDAC as an example. The TDAC consists of an analog block and a digital block that comprise AND gates, an OR gate, switches, a switched current source (SCS), resistors, and capacitors. The digital memory values are \(B_1\)–\(B_4\), and in this example, \(B_1\) and \(B_4\) are the least significant bit (LSB) and the most significant bit (MSB), respectively. \(S_{in}(t)\) is the trigger signal for activating the DAC and corresponds to spike pulses when the TDAC is used as the output stage of a synapse circuit. Signals \(S_{B,1}(t)\)–\(S_{B,4}(t)\) are non-overlapping digital signals with pulse width \(t_w\) for the DAC, and these values are either zero or unity. The SCS outputs a current \(I_{out}(t)\) (\(\propto V_{non}(t)\)), and the leak resistance \(R_{out}\) is an option for realizing the waveform of synaptic potential.
The DAC process using the TDAC without the leak resistance \(R_{out}\) is as follows (Fig. 2b):
-
(1)
When \(S_{in}(t)\) is high, \(V_{non}(t)\) is set to \(\mathrm {V_{set}}\).
-
(2)
When \(S_{in}(t)\) is turns off, \(S_{B,4}(t)\) is generated at the trailing edge of \(S_{in}(t)\). At the same time, \(V_{non}(t)\) increases exponentially with time constant \(C_{lk}R_{lk}\). If \(B_{4}\) is high, then capacitor \(C_{out}\) is charged during \(t_w\) by a current proportional to \(V_{non}(t)\).
-
(3)
\(S_{B,3}(t)\) is generated at the trailing edge of \(S_{B,4}\). If \(B_{3}\) is high, capacitor \(C_{out}\) is charged during \(t_w\) by a current that is proportional to \(V_{non}(t)\).
-
(4)
Operation 3) is repeated until \(S_{B,1}(t)\) is generated.
For example, \(V_{out,1110}\) represents the voltage-converted digital input code \((1110)_2\) (Fig. 2b) that is obtained by charging, charging, charging, and not charging.
Conventional DACs use many resistors or current sources to weight each bit of digital memory. Implementing these circuit components causes the footprint area to be squared for every unit increase in the length of the memory. By contrast, a TDAC uses a current waveform to weight each memory bit. In the TDAC, the numbers of AND gates, OR gates, and signal generators of \(S_{B,k}\) needed to sample the current waveform increases as the length of the memory increases. Therefore, the number of transistors increases linearly, but the disadvantage is that the time taken by the DAC increases. A TDAC is suitable for hardware that must be compact and operate at low speed, such as SNN hardware. In this example, the output current is positive but the TDAC can output negative current.

Principle of the time-domain DAC (TDAC) in circuit form: a circuit; b voltage waveform of each node of the circuit in a
3 Numerical Analysis of Time-Domain Digital-to-Analog Converter
3.1 Time-Domain Digital-to-Analog Conversion Without Leak Resistance
We define the time of the trailing edge of \(S_{in}(t)\) to be zero, and we express the voltage \(V_{out}(t)\) as
where q is the memory length, t is continuous time (\(t \ge 0\)), and \(f_{scs}(\cdot )\) characterizes the SCS. In this section, we analyze the TDAC when \(V_{non}(t)\) is described by \(V_{set}\exp (-\frac{t}{C_{lk}R_{lk}})\) and \(f_{scs}(V_{non}(t))=V_{non}(t)\). Under these conditions, Eq. (1) is expressed as
We integrate Eq. (2) to obtain
To ensure that the DAC characteristics remain linear, the weight of the upper bit of the adjacent must be twice that of the lower bit, namely
We solve Eq. (4) to obtain
Figure 3 shows the input–output characteristics of the TDAC obtained from numerical simulation for varying \(\frac{t_w}{C_{lk}R_{lk}}\). As shown therein, the characteristics are linear when \(\frac{t_w}{C_{lk}R_{lk}} = \ln 2\) but nonlinear otherwise. In particular, monotonicity is also lost when \(\frac{t_w}{ C_{lk}R_{lk} } < \ln 2\).

Input–output characteristics of TDAC obtained from numerical simulation for varying \(\frac{t_w}{C_{lk}R_{lk}}\)
3.2 Time-Domain Digital-to-Analog Conversion With Leak Resistance
When a TDAC is used as the output stage of a synaptic circuit, we can view \(C_{out}\) as the membrane capacitance of an analog neuron circuit, where the leak resistance \(R_{out}\) is connected in parallel with \(C_{out}\). In this situation, the temporal variation of \(V_{out}(t)\) with \(R_{out}\) is expressed by
We will show that Eq. (6) fits well with biological data on synaptic potentials when all the memory bits are unity and \(qt_w\) is sufficient large, in which case \(\sum ^{q-1}_{k=0} S_{B,q-k}(t)B_{q-k}\) is nearly unity regardless of t. We assume that \(V_{out}(0)\) is zero, and in this case Eq. (6) is expressed as
We solve Eq. (7) by using the method of variation of constants, setting \(C_{out}R_{out}=\tau _1\) and \(C_{lk}R_{lk}=\tau _2\). The solution of Eq. (7) is given by
where \(g(\cdot )\) is a function of time. By using Eqs. (7) and (8), \(\frac{dV_{out}(t)}{dt}\) is expressed as
If \(\tau _1=\tau _2\), then the integral of Eq. (9) with respect to t is \(tV_{set}\) because \(g'(t)\) is a constant. In this case, \(V_{out}(t)\) is given by
which is an alpha function.
If \(\tau _1\ne \tau _2\), then the integral of Eq. (9) with respect to t is
where \(g_c\) is a constant of integration. By using \(V_{out}(0)=0\), we obtain \(g_c = \frac{\tau _1\tau _2}{\tau _1-\tau _2}V_{set}\). Substituting \(g_c\) for g(t), we obtain
Substituting Eq. (12) for Eq. (8), we obtain
which is a dual exponential function. It is known that alpha and dual exponential functions fit well to biological data on synaptic potentials [16, 19, 27].
Figure 4 shows synaptic potential waveforms obtained from numerical simulation. Panels (a) and (b) show the waveforms with the alpha function (\(\tau _1=\tau _2\)), and (c) and (d) show those with the dual exponential function (\(\tau _1\ne \tau _2\)). To obtain panels (a) and (c) and panels (b) and (d), we changed \(\frac{t_w}{\tau _2}\) and the digital input code, respectively. In panels (a) and (c), the waveforms are so similar that they cannot be distinguished visually, and the peak of the potential does not change when \(\frac{t_w}{\tau _2}\) is varied. By contrast, as shown in panels (b) and (d), when the input code is \((10101010)_2\) or \((01010101)_2\), the peak changes. In the TDAC, \(C_{out}\) is not charged during \(S_{B,k}\) when memory bit k is zero, and this is caused by alternating charging and leaking. Moreover, the upper bit is converted into analog current faster than the lower one. However, we can ignore the influence of these when \(qt_w\) is sufficiently smaller than the time constant of the membrane potential of a neuron circuit.

Synaptic potential waveforms obtained from numerical simulation: a \(\tau _1=1\) and \(\tau _2=1\) when \(\frac{t_w}{\tau _2}\) is varied; b \(\tau _1=1\) and \(\tau _2=1\) when the DAC digital input code is varied; c \(\tau _1=1\) and \(\tau _2=0.5\) when \(\frac{t_w}{\tau _2}\) is varied; d \(\tau _1=1\) and \(\tau _2=0.5\) when the DAC digital input code is varied
4 Proposed Circuit
A block diagram of our proposed circuit is shown in Fig. 5, where an 8-bit (sign+7) DAC can output negative and positive current. The circuit consists of a digital block and an analog block, the details of which are shown in Fig. 6.

Block diagram of proposed 8-bit TDAC
The digital block consists of logic gates and delay circuits (DLs). Each DL consists of 11 transistors that output \(S_{B,k}\) with pulse width \(t_w\). The pulse width is the adjusted bias voltage \(V_{dl}\). If the bit-length of the TDAC increases, then an additional DL, two NAND gates, a NOT gate, two NMOS transistors, and two PMOS transistors are required, thereby increasing the total number of transistors by 25. The output signal of the digital block is the input for the analog block.
The analog block consists of voltage-controlled current sources, switches, MOS resistors, and MOS capacitors. Negative and positive current outputs are realized by transistors \(\mathrm {M_{n}}\) and \(\mathrm {M_{p}}\), respectively. The number of transistors in the analog block does not increase when the bit-length of the TDAC increases. We explain the operation of positive and negative current output in Sections 4.2 and 4.3, respectively.

Details of the a digital block, b delay circuit, and c analog block of the proposed circuit
4.1 Positive Current Output
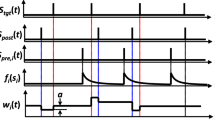
The proposed circuit outputs positive current when \(B_{8}\) is unity. As an example, Fig. 7a shows the timing diagram of the input signal and node voltages when the input digital bit code is \((11101000)_2\). The process for outputting positive current is as follows.
-
(1)
When \(S_{in}(t)\) turns high, \(S_{rsp}(t)\) and \(S_{stp}(t)\) turn high and low, respectively. At the same time, \(V_{gp}(t)\) is set to \(V_{rsp}\), where \(V_{rsp}\) is a small voltage.
-
(2)
When \(S_{in}(t)\) turns off, \(S_{B,7}(t)\) is generated at the trailing edge of \(S_{in}(t)\). At the same time, \(V_{gp}(t)\) increases exponentially.
-
(3)
\(S_{B,6}(t)\) is generated at the trailing edge of \(S_{B,7}\). If \(B_{6}\) is high, then capacitor \(C_{out}\) is charged during \(t_w\) by \(\mathrm {M_{p}}\).
-
(4)
Operation 3 is repeated until \(S_{B,1}(t)\) is generated.
We prevent wasteful power consumption by setting \(S_{stp}(t)\) to low while \(S_{in}(t)\) is high. This is because wasteful current flows from \(\mathrm {M_5}\) to \(\mathrm {M_4}\) if \(S_{stp}(t)\) is high while \(S_{in}(t)\) is high.
4.2 Negative Current Output
The proposed circuit outputs negative current when \(B_{8}\) is zero. Figure 7b shows the timing diagrams of the input signal and node voltages when the input digital bit code is \((01101000)_2\). The process for outputting positive current is as follows.
-
(1)
When \(S_{in}(t)\) turns high, \(S_{rsn}(t)\) and \(S_{stn}(t)\) turn low and high, respectively. At the same time, \(V_{gn}(t)\) is set to \(V_{rsn}\), where \(V_{rsn}\) is a high voltage.
-
(2)
When \(S_{in}(t)\) turns off, \(S_{B,7}(t)\) is generated at the trailing edge of \(S_{in}(t)\). At the same time, \(V_{gn}(t)\) decreases exponentially.
-
(3)
\(S_{B,6}(t)\) is generated at the trailing edge of \(S_{B,7}\). If \(B_{6}\) is high, then capacitor \(C_{out}\) is charged during \(t_w\) by \(\mathrm {M_{n}}\).
-
(4)
Operation 3 is repeated until \(S_{B,1}(t)\) is generated.
We prevent wasteful power consumption by setting \(S_{stn}(t)\) to high while \(S_{in}(t)\) is high. This is because wasteful current flows from \(\mathrm {M_9}\) to \(\mathrm {M_{10}}\) if \(S_{stn}(t)\) is low while \(S_{in}(t)\) is high.

Timing diagrams of input signal and node voltages for a positive and b negative current output operations
5 Circuit Simulation
5.1 Time-Domain Digital-to-Analog Conversion Without Leak Resistance
We designed an 8-bit TDAC as shown in Fig. 5 with the TSMC 40 nm CMOS process (1 poly, 8 metal), and we evaluated the circuit by means of the Spectre simulation. We set the bias voltages and the capacitance as \(\mathrm {V_{DD}}=700\) mV, \(V_{dl}=180\) mV, \(V_{lkp}=140\) mV, \(V_{lkn}=420\) mV, and \(C_{out}=0.5\) pF, and the output voltage \(V_{out}(t)\) was reset to 350 mV on every input.
Figure 8 shows the input–output characteristics of the TDAC when \(V_{rsn}\) and \(V_{rsp}\) are varied separately. In the designed 8-bit TDAC, the output current is negative when the digital input code is between zero and 128, and it is positive when the digital input code is between 129 and 255. The slopes of the characteristics in the two regions can be adjusted separately by varying \(V_{rsn}\) and \(V_{rsp}\) as shown in Fig. 8. The energy per one digital-to-analog conversion is 27 fJ when the digital input code is \((11111111)_2\) and \(V_{rsp}=0\) mV.

Input–output characteristics of TDAC
5.2 Time-Domain Digital-to-Analog Conversion With Leak Resistance
The circuit simulation for synaptic-potential generation was conducted by adding a MOS resistance between the output node and the ground. We set the bias voltages and the capacitance as \(\mathrm {V_{DD}}=700\) mV, \(V_{dl}=340\) mV, \(V_{lkp}=300\) mV, \(V_{lkn}=300\) mV, \(V_{rstn}=570\) mV, \(V_{rstp}=70\) mV, and \(C_{out}=0.5\) pF.
Figure 9 shows the synaptic-potential waveforms for various digital input codes \(S_{in}(t)\) and DL outputs. As shown in Fig. 4, which was obtained by numerical simulation, the waveforms are smooth when the lined bit is unity or zero, but in other cases the waveform has multiple peaks. We obtained waveforms that are similar to those from the numerical simulation.

Synaptic-potential waveforms obtained from circuit simulation for various DAC digital input codes

Details of the a leaky integrate-and-fire (LIF) neuron circuit, b timing diagram of the input/output signal and node voltages of the LIF circuit, and c block diagram of the LIF circuit with synapse circuits

Membrane-potential waveform and input/output spikes during a LIF neuron operation with the time-domain digital-to-analog converter obtained from circuit simulation
5.3 Application of Time-Domain Digital-to-Analog Converter to a Leaky Integrate-and-Fire Neuron Circuit
To demonstrate that the TDAC works as a synapse circuit of an SNN circuit, we applied the TDAC to a leaky integrate-and-fire (LIF) neuron circuit. Figure 10 shows an LIF neuron circuit and a block diagram of the LIF circuit with synapse circuits. The TDAC in this figure is the same circuit as shown in Fig. 5. In this situation, the digital input code to the mth TDAC represents a synaptic weight \(W_{m}\).
The neuron circuit in Fig. 10a integrates the currents from the TDACs by capacitor \(C_x\), and membrane potential \(V_x(t)\) is generated. The MOS transistor \(\mathrm {M_k}\) works as a leak resistor. Voltages \(V_{lk}\) and \(V_{rst}\) are the resting membrane potential and the reset potential, respectively (Fig. 10b). When \(V_x(t)\) reaches \(V_{th}\), output spike \(S_{out}(t)\) is generated and \(V_x(t)\) is reset to \(V_{rst}\). The bias voltages \(V_{bp1}\) and \(V_{bp2}\) adjust the firing threshold voltage \(V_{th}\) and the spike pulse width of \(S_{out}(t)\) by varying the rising time of \(V_{a}\) and \(V_{b}\). Voltage \(V_x\) is reset to \(V_{rst}\) when \(V_x(t)\) reaches \(V_{th}\). The current output nodes of the TDACs connect to \(V_x(t)\) as shown in Fig. 10c to achieve current–based summation asynchronously. Each TDAC has no resistor or capacitor for generating a PSP because the LIF circuit includes those components as \(\mathrm {M_k}\) and \(C_x\).
A circuit simulation with the LIF circuit was conducted. We used four TDACs as synapse circuits and set the bias voltages and the capacitance as \(\mathrm {V_{DD}}=700\) mV, \(V_{dl}=340\) mV, \(V_{lkp}=300\) mV, \(V_{lkn}=300\) mV, \(V_{rstn}=570\) mV, \(V_{rstp}=200\) mV, \(V_{rst}=200\) mV, \(V_{xlk}=200\) mV, \(V_{lk}=550\) mV, \(V_{bp1}=100\) mV, \(V_{bp2}=100\) mV, and \(C_{x}=0.5\) pF. The values of the synaptic weights are \(W_{1}=(11000000)_2\), \(W_{2}=(10100000)_2\), \(W_{3}=(01111000)_2\), and \(W_{4}=(11101011)_2\). Here, \(W_{3}\) is negative because the MSB is zero. The periods of input spikes \(S_{in,1}\), \(S_{in,2}\), \(S_{in,3}\), and \(S_{in,4}\) are 210 ns, 230 ns, 250 ns, and 270 ns, respectively.
The results of the circuit simulation are shown in Fig. 11. As shown in Fig. 11, a PSP is generated when the spike pulse arrives, and the neuron circuit generates spike pulse \(S_{out}(t)\) when \(V_x(t)\) reaches \(V_{th}\). The LIF circuit and the TDAC have no clock signal, and their operations start with the input spikes as their trigger; thus, the SNN circuit is an asynchronous system like biological neural networks. The circuit simulation results show that the TDAC can be used to implement neuromorphic hardware.
6 Conclusion
We proposed a new DAC, called a TDAC, in which the weight of each bit that codes for the DAC is realized by a current waveform sampled using non-overlapping digital signals. The number of transistors needed to implement a TDAC increases linearly with the bit-length, but the transistors can be made small because they work as a digital circuit. A TDAC is therefore more compact than a conventional DAC in which the number of transistors increases exponentially with increasing bit-length. Moreover, a TDAC with leak resistance realizes biologically plausible synaptic responses without the need for other circuit components. TDACs are therefore suitable for implementing mixed-signal SNN hardware that requires high integration. Moreover, a circuit simulation showed that a TDAC works as a synapse circuit of SNNs by applying a TDAC to an LIF neuron circuit.
We showed the condition under which a TDAC remains linear, namely, that the ratio of the pulse width for sampling the current waveform to the time constant should be \(\ln 2\). To realize a TDAC that has good linearity and is robust against fabrication mismatches, the pulse width (resp. the time constant) should be set according to the time constant (resp. the pulse width), and we intend to develop such a circuit in our future work.
References
S.P. Adhikari, C. Yang, H. Kim, L.O. Chua, Memristor bridge synapse-based neural network and its learning. IEEE Trans. Neural Netw. Learn. Syst. 23(9), 1426–1435 (2012)
F. Akopyan, J. Sawada, A. Cassidy, R. Alvarez-Icaza, J. Arthur, P. Merolla, N. Imam, Y. Nakamura, P. Datta, G.J. Nam et al., Truenorth: Design and tool flow of a 65 mW 1 million neuron programmable neurosynaptic chip. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 34(10), 1537–1557 (2015)
J.F. Albarran, D.A. Hodges, A charge-transfer multiplying digital-to-analog converter. IEEE J. Solid-State Circuits 11(6), 772–779 (1976)
K. Ando, K. Ueyoshi, K. Orimo, H. Yonekawa, S. Sato, H. Nakahara, S. Takamaeda-Yamazaki, M. Ikebe, T. Asai, T. Kuroda et al., Brein memory: A single-chip binary/ternary reconfigurable in-memory deep neural network accelerator achieving 1.4 TOPS at 0.6 W. IEEE J. Solid-State Circuits 53(4), 983–994 (2017)
D. Bankman, L. Yang, B. Moons, M. Verhelst, Murmann, B. An always-on 3.8 \(\mu \)j/86% CIFAR-10 mixed-signal binary CNN processor with all memory on chip in 28nm CMOS. In: Int. Solid State Circuits Conf., pp. 222–224. IEEE (2018)
G.W. Burr, R.M. Shelby, A. Sebastian, S. Kim, S. Kim, S. Sidler, K. Virwani, M. Ishii, P. Narayanan, A. Fumarola et al., Neuromorphic computing using non-volatile memory. Adv. Phys. X 2(1), 89–124 (2017)
A. Chen, A review of emerging non-volatile memory (NVM) technologies and applications. Solid-State Electron. 125, 25–38 (2016)
G.K. Chen, R. Kumar, H.E. Sumbul, P.C. Knag, R.K. Krishnamurthy, A 4096-neuron 1M-synapse 3.8-pj/SOP spiking neural network with on-chip STDP learning and sparse weights in 10-nm FinFET CMOS. IEEE J. Solid-State Circuits 54(4), 992–1002 (2018)
S.G. Cho, E. Beigné, Z. Zhang, A 2048-neuron spiking neural network accelerator with neuro-inspired pruning and asynchronous network on chip in 40nm CMOS. In: Proc. Cust. Integr. Circuits Conf., pp. 1–4. IEEE (2019)
M. Davies, N. Srinivasa, T.H. Lin, G. Chinya, Y. Cao, S.H. Choday, G. Dimou, P. Joshi, N. Imam, S. Jain et al., Loihi: A neuromorphic manycore processor with on-chip learning. IEEE Micro 38(1), 82–99 (2018)
G. Indiveri, F. Corradi, N. Qiao, Neuromorphic architectures for spiking deep neural networks. In: Int. Electron. Devices Meet., pp. 4–2. IEEE (2015)
H. Kim, H. Tang, W. Choi, J. Park, An energy-quality scalable STDP based sparse coding processor with on-chip learning capability. IEEE Trans. Biomed. Circuits Syst. 14(1), 125–137 (2020)
D. Kuzum, S. Yu, H.P. Wong, Synaptic electronics: materials, devices and applications. Nanotechnology 24(38), 382001–1–22 (2013)
T. Miki, Y. Nakamura, M. Nakaya, S. Asai, Y. Akasaka, Y. Horiba, An 80-Mhz 8-bit CMOS D/A converter. IEEE J. Solid-State Circuits 21(6), 983–988 (1986)
R. Mochida, K. Kouno, Y. Hayata, M. Nakayama, T. Ono, H. Suwa, R. Yasuhara, K. Katayama, T. Mikawa, Y. Gohou, A 4M synapses integrated analog ReRAM based 66.5 TOPS/W neural-network processor with cell current controlled writing and flexible network architecture. In: Symp. VLSI Tech., pp. 175–176. IEEE (2018)
T.S. Otis, Y. De Koninck, I. Mody, Characterization of synaptically elicited GABAB responses using patch-clamp recordings in rat hippocampal slices. J. Physiol. 463(1), 391–407 (1993)
H.U. Post, K. Schoppe, A 14-bit monotonic NMOS D/A converter. IEEE J. Solid-State Circuits 18(3), 297–301 (1983)
N. Qiao, H. Mostafa, F. Corradi, M. Osswald, F. Stefanini, D. Sumislawska, G. Indiveri, A reconfigurable on-line learning spiking neuromorphic processor comprising 256 neurons and 128K synapses. Front. Neurosci. 9, 141–1–17 (2015)
W. Rall, R. Burke, T. Smith, P.G. Nelson, K. Frank, Dendritic location of synapses and possible mechanisms for the monosynaptic EPSP in motoneurons. J. Neurophysiol. 30(5), 1169–1193 (1967)
J. Schemmel, J. Fieres, K. Meier, Wafer-scale integration of analog neural networks. In: Proc. Int. Jt. Conf. Neural Netw., pp. 431–438. IEEE (2008)
J. Schemmel, L. Kriener, P. Müller, K. Meier, An accelerated analog neuromorphic hardware system emulating nmda-and calcium-based non-linear dendrites. In: Proc. Int. Jt. Conf. Neural Netw., pp. 2217–2226. IEEE (2017)
T. Schoenauer, S. Atasoy, N. Mehrtash, H. Klar, NeuroPipe-Chip: A digital neuro-processor for spiking neural networks. IEEE Trans. Neural Netw. 13(1), 205–213 (2002)
K. Seo, I. Kim, S. Jung, M. Jo, S. Park, J. Park, J. Shin, K.P. Biju, J. Kong, K. Lee et al., Analog memory and spike-timing-dependent plasticity characteristics of a nanoscale titanium oxide bilayer resistive switching device. Nanotechnology 22(25), 254023–1–5 (2011)
B. Smith, Coding by feedback methods. In: Inst. Electr. Electron. Eng., vol. 41, pp. 1053–1058. IEEE (1953)
H. Tanaka, T. Morie, K. Aihara, A CMOS spiking neural network circuit with symmetric/asymmetric STDP function. IEICE Trans. Fundamentals 92(7), 1690–1698 (2009)
Y.F. Wang, Y.C. Lin, I.T. Wang, T.P. Lin, T.H. Hou, Characterization and modeling of nonfilamentary Ta/TaO x/TiO 2/Ti analog synaptic device. Sci. Rep. 5, 10150–1–9 (2015)
M. Wilson, J.M. Bower, Cortical oscillations and temporal interactions in a computer simulation of piriform cortex. J. Neurophysiol. 67(4), 981–995 (1992)
C.X. Xue, W.H. Chen, J.S. Liu, J.F. Li, W.Y. Lin, W.E. Lin, J.H. Wang, W.C. Wei, T.Y. Huang, T.W. Chang et al., Embedded 1-Mb ReRAM-based computing-in-memory macro with multibit input and weight for CNN-based AI edge processors. IEEE J. Solid-State Circuits 55(1), 203–215 (2019)
E. Yurchuk, S. Mueller, D. Martin, S. Slesazeck, U. Schroeder, T. Mikolajick, J. Müller, J. Paul, R. Hoffmann, J. Sundqvist, et al. Origin of the endurance degradation in the novel HfO 2-based 1t ferroelectric non-volatile memories. In: Proc. Int. Reliab. Phys. Symp., pp. 2E–5. IEEE (2014)
Acknowledgements
This work was supported by the VLSI Design and Education Center (VDEC) of the University of Tokyo in collaboration with Cadence Design Systems, Inc. This work was also supported by the BMAI Project at IIS of the University of Tokyo.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Uenohara, S., Aihara, K. Time-Domain Digital-to-Analog Converter for Spiking Neural Network Hardware. Circuits Syst Signal Process 40, 2763–2781 (2021). https://doi.org/10.1007/s00034-020-01597-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-020-01597-2