
Abstract
In this note, we study the long-time dynamics of passive scalars driven by rotationally symmetric flows. We focus on identifying precise conditions on the velocity field in order to prove enhanced dissipation and Taylor dispersion in three-dimensional infinite pipes. As a byproduct of our analysis, we obtain an enhanced decay for circular flows on a disc of arbitrary radius.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
This note considers the evolution of a passive scalar f in a domain \(\Omega \subset \mathbb {R}^d\), \(d=2,3\), that is advected by an external velocity field \({\varvec{v}}:\Omega \rightarrow \mathbb {R}^d\) and is undergoing molecular diffusion. Our interest is to study quantitatively how the combined effect of diffusion and advection leads to faster time-scales of homogenization for f compared to the case when only diffusion is present. The passive scalar satisfies the advection–diffusion equation
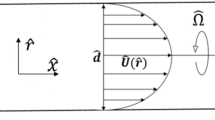
where \(\nu >0\) is the diffusion coefficient and \({\varvec{n}}\) is the outward unit normal to \({\partial }\Omega \). We are interested in the regime where \(\nu \ll 1 \), in which dissipative effects are observed on large time-scales of order \(O(\nu ^{-1})\). Since the average over the domain is conserved, we always assume that  . The domain \(\Omega \) will either be a disc of radius \(R>0\), denoted by D, or the infinite pipe \(D\times \mathbb {R}\), and the velocity field is respectively
. The domain \(\Omega \) will either be a disc of radius \(R>0\), denoted by D, or the infinite pipe \(D\times \mathbb {R}\), and the velocity field is respectively
Here \(\hat{{{\textsf{e}}}}_{\theta }\) and \(\hat{{{\textsf{e}}}}_{z}\) are the unit vectors in the angular direction in D and in the vertical direction in \(D\times \mathbb {R}\), respectively. This situation and similar have been recently studied in [6,7,8], in analogy with the case of passive scalars advected by shear flows [1, 3].
The purpose of this short note is twofold: on the one hand, we identify precise conditions on the velocity field in the pipe setting that guarantee the enhanced dissipation [5] and Taylor dispersion [2, 10, 11] mechanisms. On the other hand, we derive a dissipation enhancement result in the disc for a general class of radial velocity fields. In particular, we will assume the following for the profile v(r) of the velocity field in (1.2).
Assumption 1.1
The first m derivatives of \(v:[0,R]\rightarrow \mathbb {R}\) do not vanish simultaneously; that is,
for every \(0\le r\le R\).
We now state our main results, considering differently the pipe and the disc cases.
1.1 Pipe Parallel Flows
When \(\Omega =D\times \mathbb {R}\), the Eq. (1.1) can be written in cylindrical coordinates as
Taking the partial Fourier transform along the axial coordinate z on both sides of the equation, we see then that for each \(k\in \mathbb {R}\) the Fourier component
satisfies the equation
where we denote
In particular, each Fourier mode \(\hat{f}_k\) evolves independently from all the others, so in the following, it suffices to consider the Eq. (1.4) for a fixed parameter k. A further reduction can be made by considering the function
that satisfies
Notice that \(g_k\) already incorporates the diffusion along the channel. Our first main result is the following.
Theorem 1
Let \(v:[0,R]\rightarrow \mathbb {R}\) satisfy Assumption 1.1 and let \(k\ne 0\). Then, there exist constants \(c_1,C_1>0\), independent of \(\nu ,k\), such that for all initial data \(g_k^{in}\in L^2(D)\) the solution to (1.6) satisfies
for every \(t\ge 0\). For the solution to (1.4) with initial data \(g_k^{in}=\hat{f}^{in}_k\), we have the estimate
for every \(t\ge 0\).
The bounds in the theorem above are analogous to the ones obtained in [7] for multi-dimensional shear flows. In fact, they also proved the same result as in Theorem 1 for the velocity field \(v(r)=1-r^m\) in the disc of radius 1. However, a general condition analogous to that required in Assumption 1.1 was not identified. The proof of Theorem 1, given in Sect. 2, is inspired by the arguments in [7]. In particular, we obtain (1.7) as a consequence of a pseudospectral lower bound and the application of a result of Wei [12]*Theorem 1.3, see also Theorem 3 below.
Having at hand the k by k estimate (1.7), we are also able to quantify precisely the time-decay for the solution to the original problem (1.3).
Theorem 2
Let \(f^{in}\in L^1_zL^2_{r,\theta }\), and let \(v:[0,R]\rightarrow \mathbb {R}\) satisfy Assumption 1.1. Then, there exist constants \(c_2,C_2>0\), independent of \(\nu \), such that the solution to (1.3) satisfies
for every \(t\ge 0\).
With (1.8) we have a precise quantification of the Taylor dispersion mechanism for the problem at hand, see also [4] where these types of bounds were obtained in another context. The factor \(\sqrt{\nu /t}\) is analogous to the standard heat equation with diffusivity coefficient \(\nu ^{-1}\) and it is related to low frequencies. On the other hand, the presence of the advection allows us to prove the algebraic decay on a time-scale \(O(\nu ^{-\frac{m}{m+2}})\), which is related to the enhanced dissipation mechanism.
The choice of the norms on which to quantify the decay is rather natural from the available k by k bounds. From a physical point of view, the flow is stretching the concentration towards spatial infinity in the z-direction. Combining this with enough integrability in z, the stretching generated by the flow makes the concentration intersect smaller sets in the discs orthogonal to z, so that a decay can be effectively quantified even if the diffusion is still not efficient on the time-scale under consideration.
1.2 Circular Flows in a Disc
When we consider the Eq. (1.1) with \(\Omega =D\) and \({\varvec{v}}=rv(r)\hat{{{\textsf{e}}}}_\theta \), the problem we have at hand is
where we recall that \(\Delta _{r,\theta }\) is defined in (1.5). If we now take a partial Fourier transform in the angular direction, namely
the Fourier coefficients \(\hat{f}_\ell \) of a solution f to Eq. (1.9) satisfy
for each \(\ell \in \mathbb {Z}\). The analogy with (1.6) is the following: if we take the angular Fourier transform in (1.6), we get
Hence, (1.10) is the Eq. (1.11) for the choice of parameters \(\ell =k\). We can therefore recover the bounds on \(\hat{f}_\ell \) from the ones we have for \(g_{\ell ,\ell }\) in Theorem 1. Observing that \(|\ell |\ge 1>\nu \), we obtain the following.
Corollary 1.2
Let \(v:[0,R]\rightarrow \mathbb {R}\) satisfy Assumption 1.1 and \(\ell \ne 0\). Then, there exist constants \(c_3,C_3>0\), independent of \(\nu ,\ell \), such that for all initial data \(\hat{f}_{\ell }^{in}\in L^2(0,R)\) the solution to (1.10) satisfy
for every \(t\ge 0\).
The bound in the physical space for f now it directly follows by Parseval’s identity. Namely, if
we obtain that
for a suitable constant \(C_4>0\). Therefore we capture the enhanced dissipation mechanism, telling us that the solution is decaying on a time-scale \(O(\nu ^{-\frac{m}{m+2}})\), which is always faster than \(O(\nu ^{-1})\). When the angular average, corresponding to \(\hat{f}_0\), is not zero, we would obtain that f is converging towards its angular average on the fast time-scale. Notice that \(\hat{f}_0\) is not conserved but it satisfies a standard 1d heat equation, therefore we cannot expect to have decay on a faster time-scale for it.
2 Semigroup Decay via Resolvent Estimates
The main tool we will employ in the proof of Theorem 1 is a quantitative version of the Gearhart–Prüss obtained by Wei in [12, Theorem 1.3] (see also [9]), which we reproduce below for the reader’s convenience.
Theorem 3
Let X be a Hilbert space and \(H:{\mathcal {D}}(H)\rightarrow X\) be an m-accretive operator on X. Then
in which the quantity \(\Psi (H)\) is the pseudospectral abscissa of H, defined as
We rewrite the Eq. (1.6) as
where the operator \(H:{\mathcal {D}}(H)\rightarrow L^{2}(D)\) is defined as
which is indeed m-accretive [8]. Thus, by the Lumer-Phillips theorem, the unique mild solution to Eq. (1.6) is given by a strongly continuous semigroup in \(L^{2}(D)\), namely, for the initial datum \(g_k^{in}\in L^{2}(D)\),
solves Eq. (1.6). Moreover, by Theorem 3, the operator \(\textrm{e}^{-tH}\) satisfies the estimate (2.1). Hence, the proof of Theorem 1 is reduced in proving a pseudospectral bound for the operator H defined in (2.2).
2.1 Pseudospectral Bounds
Being k a fixed parameter from now on, let us write
To prove Theorem 1, it suffices to show that
for every \(g\in {\mathcal {D}}(H)\), where the constant \(c_1\) needs to be chosen uniformly in \(\lambda \in \mathbb {R}\).
In the computations that follow, we frequently omit the subscripts on the notation for norms and inner products in \(L^2(D)\), where no ambiguity can occur as to the relevant function space.
The strategy for proving (2.4) is as follows: we choose, for each \(\lambda \in \mathbb {R}\), a neighbourhood \(\mathcal {E}_\lambda \subseteq [0,R]\) of the level set \(E_\lambda =v^{-1}(\lambda )\), and split the domain of integration
in order to get upper bounds for each of the two integrals on the right-hand side. The motivation behind this is that, away from the annulus \(\{x\in D:|{x}|\in \mathcal {E}_\lambda \}\), the convection term \(v-\lambda \) in (2.3) is bounded away from zero, which allows us to recover a bound on the \(L^2\) norm in terms of \(H_{\lambda }\) thanks to the invertibility of \(v-\lambda \). On the other hand, in the integral over the region where \(|{x}|\in \mathcal {E}_\lambda \), we exploit some Poincaré-type inequality where we can gain smallness parameters from the measure of the set \(\mathcal {E}_\lambda \). That the latter set is indeed small is consequence of Assumption 1.1. We thus choose the sets \(\mathcal {E}_\lambda \) as follows.
Definition 2.1
Let \(m\in \mathbb {N}\) be the one in Assumption 1.1. Define
-
\(E_{\lambda ,\delta }\) to be the preimage under v of the interval \((\lambda -\delta ^m,\lambda +\delta ^m)\), that is, \(E_{\lambda ,\delta }=\{r\in [0,R]\mid |{v(r)-\lambda }|<\delta ^m\}\).
-
\(\mathcal {E}_{\lambda ,\delta }\) to be the neighbourhood of the set \(E_{\lambda ,\delta }\) with thickness \(\delta \), that is, \(\mathcal {E}_{\lambda ,\delta }=\{r\in [0,R]\mid \textrm{dist}(x, E_{\lambda ,\delta })<\delta \}\).
We collect in the next two propositions the bounds we have for the two integrals on the right-hand side of (2.5). Away from the level sets we have the following result.
Proposition 2.2
Let \(\mathcal {E}_{\lambda ,\delta }\) be the set defined in Definition 2.1. Then, for any \(g\in {\mathcal {D}}(H)\) the following holds true
Near the level sets, we can prove the result below.
Proposition 2.3
Let \(\mathcal {E}_{\lambda ,\delta }\) be the set defined in Definition 2.1. Then there exists a constant \(\tilde{C}>0\) such that, for any \(g\in {\mathcal {D}}(H)\), the following holds true
We postpone the proof of Propositions 2.2–2.3 to the end of this section. With the bounds (2.6) and (2.7) at hand, we are ready to present the proof of Theorem 1.
Proof of Theorem 1
Summing together (2.6) and (2.7) and rearranging, we have for all \(\lambda \in \mathbb {R}\) and \(\delta >0\) that
We now make a choice of \(\delta \) depending on the parameters \(\nu \) and k:
-
If \(0<\nu \le |{k}|\), then the sharpest bound we can recover is by choosing \(\delta =\delta _0\nu ^{\frac{1}{m+2}}|{k}|^{-\frac{1}{m+2}}\), resulting in \(\Vert {g} \Vert ^2\le c_1\nu ^{-\frac{m}{m+2}}|{k}|^{-\frac{2}{m+2}} \Vert {H_\lambda g} \Vert \Vert {g} \Vert \) with the constant \(c_1=4(\delta _0^{-m}+\delta _0^{-(2m+2)} +\tilde{C}\delta _0^2 )\) where \(\delta _0\) is the one given in Lemma 2.5.
-
If instead \(0<|{k}|\le \nu \), observing that
$$\begin{aligned} \frac{1}{|{k}|\delta ^m} + \frac{\nu }{|{k}|^2\delta ^{2m+2}} + \frac{\tilde{C}\delta ^2}{\nu } = \frac{\nu }{k^2}\Bigg ( \frac{|{k}|}{\nu }\frac{1}{\delta ^m} + \frac{1}{\delta ^{2m+2}} + \frac{k^2}{\nu ^2}\tilde{C}\delta ^2 \Bigg ). \end{aligned}$$Since \(|k|/\nu \le 1\), we choose \(\delta =\delta _0\), and find that \(\Vert {g} \Vert ^2\le c_1\frac{\nu }{k^2}\Vert {H_\lambda g} \Vert \Vert {g} \Vert \), with the same constant \(c_1\) as in the previous case.
Altogether we recover inequality (2.4), thanks to which we can apply Theorem 3 and conclude the proof of Theorem 1. \(\square \)
It thus remains to show the proofs of Proposition 2.2-2.3, which we present in the next two sections.
2.2 Bounds Away from Level Sets
In this section, we aim at proving Proposition 2.2. To this end, we follow the strategy in [7], and we introduce the function
in which
We are now ready to prove Proposition 2.2.
Proof of Proposition 2.2
By the definition of \(\chi \), we know that \(\chi (v-\lambda )\ge 0\). Moreover, in the set \(\mathcal {E}_{\lambda ,\delta }\) we have \(|v-\lambda |\ge \delta ^m\). Therefore
To estimate the term \(\langle (v-\lambda )\chi g,g\rangle _{}\), observe that
in which we recognise the relevant term on the final line. Noting that \(|{\partial _{r}\chi }|<\delta ^{-1}\), it then follows from (2.9) and the triangle inequality that
Observe also that
Thus, combining (2.8) with (2.10) and (2.11), we have
where we also applied the Young’s inequality on the product \(\nu ^\frac{1}{2}\delta ^{-(m+1)} \Vert {H_\lambda g} \Vert ^\frac{1}{2}\Vert {g} \Vert ^\frac{1}{2}\) on the penultimate line. \(\square \)
2.3 Bounds Near Level Sets
To prove Proposition 2.3, we use two results from [7]. The first of these is a Poincaré-type bound which appears in [7, Lemma B.1]:
Lemma 2.4
For all \(g\in H^1(D)\) and all \(R\ge R_2\ge R_1\ge 0\), we have
The second result is that \(\mathcal {E}_{\lambda ,\delta }(v)\) is covered by a finite union of intervals whose total length is in \(O(\delta )\) as \(\delta \longrightarrow 0\).
Lemma 2.5
Let \(v\in C^{m}([0,R])\) satisfy Assumption ’1.1. Then there exist constants \(C_0,\delta _0>0\) and, for each \(\lambda \in \mathbb {R}\) and \(\delta >0\), a choice of a finite family \(\mathcal {V}^m_{\lambda ,\delta }\) of intervals such that
and such that for all \(\lambda \in \mathbb {R}\) and \(0<\delta \le \delta _0\) we have that
Proof
This Lemma can be extracted from the proof of [7, Lemma 2.6], where such coverings by intervals are constructed in order to bound the measure \(|{\mathcal {E}_{\lambda ,\delta }}|\) of the level set neighbourhoods.
Observe first that it suffices to prove this result with \(E_{\lambda ,\delta }\) in place of \(\mathcal {E}_{\lambda ,\delta }\), since one may enlarge by \(\delta \) each interval in a covering of \(E_{\lambda ,\delta }\) to produce one for \(\mathcal {E}_{\lambda ,\delta }\) that still satisfies (2.12) but with a worse constant \(C_0\). Moreover, since \(E_{\lambda ,\delta }\) is empty for \(\lambda \) outside of a compact neighbourhood of \(v([0,R])\subseteq \mathbb {R}\), it suffices to be able to choose \(C_0\) locally constant near each \(\lambda _0\) in this neighbourhood.
Fix now \(\lambda _0\in \mathbb {R}\). The idea is to use the fact that \(E_{\lambda ,\delta }\) is a union of level sets \(E_\lambda \) with \(\lambda \) close to \(\lambda _0\):
and by the continuity of the function v, we expect the level set \(E_\lambda \) not too change to much when \(\lambda \) is perturbed away from \(\lambda _0\). Indeed, using Assumption 1.1, \(E_{\lambda _0}=v^{-1}(\lambda _0)\) consists of finitely many elements \(r_1,\dots ,r_{N_{\lambda _0}}\). Near each \(r_i\), the function v is approximated by its Taylor series
in which \(n_i\in \mathbb {N}\) is the order of the lowest-order derivative of v which does not vanish at \(r_i\); again by Assumption 1.1 we have that \(1\le n_i\le m\). For small \(\delta >0\), the function v then approximately maps the interval \(\mathcal {B}_{\delta }(r_i)\subseteq [0,R]\) to the interval \(\mathcal {B}_{a_i\delta ^{n_i}}(\lambda )\subseteq \mathbb {R}\). Conversely, one is able to choose \(R_0>0\) such that
for all sufficiently small \(\delta >0\). Once again we refer to the reference [7] for the details of this computation.
Choose now \(V_i=\mathcal {B}_{R_0\delta }(r_i)\) for \(i=1,\dots ,N_{\lambda _0}\). Then (2.13) is precisely the statement that the collection \(\{V_i\}_{i=1}^{N_{\lambda _0}}\) covers \(E_{\lambda ,\delta }\) for all \(\lambda \) in a small neighbourhood around near \(\lambda _0\). Finally, choosing \(C_0=2N_{\lambda _0}R_0\), we find that (2.12) is satisfied: \(\sum _{i=1}^{N_{\lambda _0}}|{V_i}|=2N_{\lambda _0}R_0\delta =C_0\delta \). \(\square \)
With the covering by intervals \(\mathcal {V}^m_{\lambda ,\delta }\) just obtained in Lemma 2.5, we are to prove Proposition 2.3.
Proof of Proposition 2.3
First, we observe that for any \(V\in \mathcal {V}^m_{\lambda ,\delta }\), thanks to Lemma 2.4 we have
Therefore,
where we have used Lemma 2.5, followed by Young’s inequality on the final line. Combining this with (2.11) we find that
3 Estimates in Physical Space
In this Section we prove Theorem 2, which gives a decay estimate on the \(L^{\infty }_zL^{2}_{r,\theta }\) norm of a solution to (1.3) when the initial datum belongs to \(L^{1}_zL^{2}_{r,\theta }\).
Proof of Theorem 2
Using that the Fourier transform is a continuous map between \(L^{1}\) and \(L^{\infty }\) together with Hölder’s inequality, thanks to Theorem 1 we have that
Then, we control the integral above by splitting the domain of integration in two regions, namely \(|{k}|\le \nu \) and \(|k|>\nu \) which is where the definition of \(\Lambda _{\nu ,k}\) changes. In particular, we have
For the low-frequency region, a change of variables shows that
For the second integral, since \(\nu ^{\frac{m}{m+2}}|{\nu }|^{\frac{2}{m+2}}=\nu \), we estimate as follows:
which combined with (3.1) proves the desired result.
References
Albritton, D., Beekie, R., Novack, M.: Enhanced dissipation and Hörmander’s hypoellipticity. J. Funct. Anal. 283(3), 109522 (2022)
Aris, R.: On the dispersion of a solute in a fluid flowing through a tube. Proc. R. Soc. Lond. A 235, 67–77 (1956)
Bedrossian, J., Coti Zelati, M.: Enhanced dissipation, hypoellipticity, and anomalous small noise inviscid limits in shear flows. Arch. Ration. Mech. Anal. 224(3), 1161–1204 (2017)
Bedrossian, J., Coti Zelati, M., Dolce, M.: Taylor dispersion and phase mixing in the non-cutoff Boltzmann equation on the whole space. arXiv:2211.05079 (2022)
Constantin, P., Kiselev, A., Ryzhik, L., Zlatoš, A.: Diffusion and mixing in fluid flow. Ann. Math. (2) 168(2), 643–674 (2008)
Coti Zelati, M., Dolce, M.: Separation, of time-scales in drift-diffusion equations on \(\mathbb{R} ^2\). J. Math. Pures Appl. 9(142), 58–75 (2020)
Coti Zelati, M., Gallay, T.: Enhanced dissipation and Taylor dispersion in higher-dimensional parallel shear flows. J. Lond. Math. Soc. (2) 108(4), 1358–1392 (2023)
Feng, Y., Mazzucato, A.L., Nobili, C.: Enhanced dissipation by circularly symmetric and parallel pipe flows. Physica D 445, 133640 (2023)
Helffer, B., Sjoestrand, J.: From resolvent bounds to semigroup bounds. arXiv:1001.4171 (2010)
Taylor, G.I.: Dispersion of soluble matter in solvent flowing slowly through a tube. Proc. R. Soc. Lond. A 219, 186–203 (1953)
Taylor, G.I.: Dispersion of matter in turbulent flow through a tube. Proc. R. Soc. Lond. A 223, 446–468 (1954)
Wei, D.: Diffusion and mixing in fluid flow via the resolvent estimate. Sci. China Math. 64(3), 507–518 (2021)
Acknowledgements
The research of MCZ was supported by the Royal Society through a University Research Fellowship (URF\R1\191492). The research of MD was supported by the SNSF Grant 182565, by the Swiss State Secretariat for Education, Research and lnnovation (SERI) under contract number M822.00034 through the project TENSE. and by GNAMPA-INdAM through the Grant D86-ALMI22SCROB_01 acronym DISFLU.
Funding
Open access funding provided by EPFL Lausanne.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no conflicts of interest to declare.
Additional information
Communicated by A. L. Mazzucato.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Coti Zelati, M., Dolce, M. & Lo, CC. Diffusion Enhancement and Taylor Dispersion for Rotationally Symmetric Flows in Discs and Pipes. J. Math. Fluid Mech. 26, 12 (2024). https://doi.org/10.1007/s00021-023-00845-0
Accepted:
Published:
DOI: https://doi.org/10.1007/s00021-023-00845-0