
Abstract
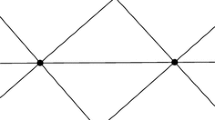
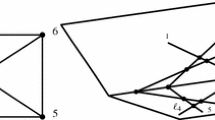
We superimpose weaving patterns on planar line arrangements, and we face the question when they can be realized by lines in 3-space. Using the combinatorial type of the given lines in the plane we derive a class of nonrealizable weavings.
Similar content being viewed by others

References
Björner, A., Las Vergnas, M., Sturmfels, B., White, N., and Ziegler, G. M.:Oriented Matroids, Cambridge University Press, Cambridge, 1991.
Bland, R. and Las Vergnas, M: Orientability of matroids,J. Combin. Theory B 24 (1978), 94–123.
Bolker, E. and Roth, B.: When is a bipartite graph a rigid framework?,Pacific J. Math. 90 (1980), 27–44.
Crapo, H. and Penne, R.: Chirality and isotopy of lines in 3-space,Adv. in Math. 103(1) (1994), 1–106.
Folkman, J. and Lawrence, J. Oriented Matroids,J. Combin. Theory B 25 (1978), 199–236.
Grünbaum, B.:Arrangements and Spreads, American Math. Soc., Providence, RI, 1972.
Pach, J., Pollack, R., and Welzl, E.: Weaving patterns of lines and line segments in space, draft preprint, Courant Institute, NYU, New York.
Penne, R.: On line diagrams, Research Report 88–14, University of Antwerp (UIA), Antwerp, 1988.
Penne, R.: Incidences of lines in space, Research Report 90–02, UIA, 1990.
Penne, R.: Moves on Pseudoline Diagrams,European J. Comb., to appear.
Penne, R.: Configurations of few lines in 3-space. Isotopy, Chirality and planar layout,Geom. Dedicata 45 (1993), 49–82.
Richter-Gebert, J.: New construction methods for oriented matroids, PhD Thesis, Royal Institute of Technology, Stockholm, 1992.
Rockafellar, R.T.:Convex Analysis, Princeton University Press, Princeton, NJ, 1970.
Welsh, D.J.A.:Matroid Theory, Academic Press, London, 1976.
Whiteley, W.: Rigidity and polarity II: weaving lines and tensegrity frameworks,Geom. Dedicata 30 (1989), 255–279.
Whitney, H.: On the abstract properties of linear dependence,Amer. J. Math. 57 (1935), 509–533.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Penne, R. Some nonrealizable line diagrams. J Intell Robot Syst 11, 193–207 (1994). https://doi.org/10.1007/BF01258303
Issue Date:
DOI: https://doi.org/10.1007/BF01258303