
Abstract
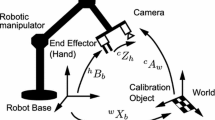
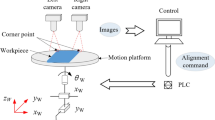
The problem of camera calibration from the perspective of hand-eye integration (henceforth referred to as the Camera-Robot (CR) problem), is addressed in this paper. Mapping results obtained from a least-squares fit using pseudo-inverse technique and a three layer neural network are compared. The calibration matrix is developed to map the image coordinates of an IRI D256 vision processor equipped with a CCD camera directly on to the coordinates for an IBM 7540 SCARA manipulator. One transformation is obtained by performing a least-squares fit using pseudo-inverse technique on a set of one hundred data points which relates two-dimensional (2D) image coordinates to corresponding twodimensional robot coordinates. The CR problem is also approached by using the same data points on a neural network. The results not only demonstrate the ability of neural networks to ‘learn’ the transformation to a reasonable accuracy, but also from the basis for a relatively simple method of adaptive self-calibration of robot-vision systems. In a broader sense, the proposed method can be used to calibrate a variety of robotic sensors that are typically used in a flexible manufacturing environment.
Similar content being viewed by others

References
Thomopoulos, S.C.A., Sensor integration and data fusion, J. Robotic Systems 7(3), 339–372 (1990).
Puente, E.A., Balaguer, C., Barrientos, A. and Yela, A., An integrated multisensor robot system, Selected Papers from the 2nd IFAC Symposium, Karlsurhe, F.R.G., October 5–7 1988, pp. 335–339.
Boyer, K.L., Vayda. A.J. and Kak, A.C., Robotic manipulation experiments using structural stereopsis for 3D vision, IEEE Expert, Fall 1986, pp. 73–92.
Thomson, A.M., Camera geometry for robot vision, Robotic Age, March-April 1981, pp. 20–27.
Sobel, I., On calibrating computer controlled cameras for perceiving 3D scenes, Artificial Intelligence 5, 185–198 (1974).
Strat, T.M., Recovering the camera parameters from a transformation matrix, Readings in Computer Vision (Martin A. Fisher and Oscar Firscheir, eds), 1987, pp. 93–99.
Ganapathy, P., Decomposition of transformation matrices for robotics vision, Proc. IEEE Int. Conf. on Robotics and Automation, March 1984, pp. 130–137.
Sutherland, I.D., Three-dimensional data input by tablet, Proc.IEEE, 62(4), 453–461 (1974).
Tsai, R.Y. and Lenz, R.K., A new technique for fully autonomous and efficient 3D robotics hand-eye calibration, in Robotics Research: The Fourth International Symposium (Robert C. Bolles and Bernard Roth, eds), 1987, pp. 287–297.
Liang, P., Chang, Y.L. and Hackwood, S., Adaptive self-calibration of vision-based robot system, IEEE Trans. Systems Man Cybernet. SMC 19(4), 811–823 (1989).
Shiu, Y. and Ahmad, S., Finding the mounting position of a sensor by solving a homogeneous transform equation of the form AX=XB, Proc. IEEE Int. Conf. on Robotics and Automation, Raleigh, NC, 1987, pp. 1666–1671.
Tsai, C., Cheng, S.K., McGee, D. and Akeel, H., Automated calibration for an industrial scara robot, Proc. 1990 Int. Robot and Vision Conference, Detroit, MI, June 1990, pp. 4–43 to 4–55.
Rosenblatt, F., Principles of Neurodynamics: Perceptrons and the Theory of Brain Mechanisms, Spartan Books, 1961.
Garg, D., Coordination of multiple robots via supervisory control, Proc. 1991 IEEE Int. Symp. on Intelligent Control, Reston, VA, August 13–15, 1991, pp. 19–24.
Wilf, J.M., Chaincode, Robotics Age 3(2), March/April 1981, pp. 143–149.
Cunningham, R., Segmenting binary images, Robotics Age 3(4), July/August 1981, pp. 121–135.
Lawson, C.L. and Hanson, R.J., Solving Least Squares Problems, Prentice-Hall Englewood Cliffs, NJ (1974).
Rumelhart, D. et al., Parallel Distributed Processing, Vol. 1, MIT Press, Cambridge, MA (1986).
Tesauro, G., He, Y. and Ahmad, S., Asymptotic convergence of back propagation, Neural Computation, 382–391 (1989).
Hornik, K., Stinchcombe, M., and White, H., Multilayer feedforward networks are universal approximators, Neural Networks 2, 359–366 (1989).
Josin, G., Neural-space generalization of a topological transformation, Biol. Cybernet., 59, 283–290 (1988).
Berenji, H.R., Artificial neural networks and approximate reasoning for intelligent control in space, Proc. 1991 American Control Conference, Boston, 1991, pp. 1075–1080.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Nagchaudhuri, A., Thint, M. & Garg, D.P. Camera-robot transform for vision-guided tracking in a manufacturing work cell. J Intell Robot Syst 5, 283–298 (1992). https://doi.org/10.1007/BF00247423
Received:
Accepted:
Issue Date:
DOI: https://doi.org/10.1007/BF00247423