
Abstract
The fractional sub-diffusion equation, which is obtained by replacing the time derivative in ordinary diffusion by a fractional derivative of order ϑ with \(0 < \vartheta < 1\), has appeared in numerous complex system. In this paper, we suggest an efficient and accurate iterative method based on coupling the variational iteration method (VIM) with an auxiliary parameter for solving three-dimensional FDEs described in the Riemann–Liouville sense. However, though the standard VIM is often invalid on large domains, the VIM with an auxiliary parameter is highly efficient in approximating the solution of complex systems even on large domains. The procedure of obtaining an optimal auxiliary parameter is illustrated through some examples, while the theoretical analysis confirms the convergence of the proposed method. Comparing the results of standard VIM and modified VIM by the auxiliary parameter confirms the effectiveness of using the new technique on the magnitude of the convergence region.
Similar content being viewed by others


1 Introduction
Fractional calculus deals with derivatives and integrals of arbitrary real or complex order [1]. This subject has attracted attention of many scientists in mathematics, physics and engineering. So, it has become a hot issue in recent years. However, fractional calculus extends the notion of derivative for those cases that the derivative order is not integer. Many phenomena in engineering and applied sciences can be described successfully by developing models using fractional calculus, such as material science and mechanics, anomalous diffusion, signal processing, finance, biological systems, hydrology [1,2,3,4,5,6,7,8]. The interested reader is referred to [9,10,11,12,13,14,15,16,17,18,19,20] for recent developments in fractional calculus and its applications.
Anomalous diffusion equations are an important class of fractional differential equations, which have been widely applied in modeling of anomalous diffusive systems, unification of diffusion, description of fractional random walk and wave propagation phenomenon, etc. [21].
The fractional sub-diffusion equation, which is obtained by replacing the time derivative in ordinary diffusion by a fractional derivative of order ϑ with \(0 < \vartheta < 1\), has been observed in numerous complex system, such as biopolymers, polymers, liquid crystals, organisms, proteins, ecosystems, and fractal and percolation clusters [22]. Some analytical and numerical solutions of sub-diffusion equations have been proposed in [23,24,25,26,27,28,29,30,31,32,33,34,35,36]. An implicit difference approximation is suggested by Zhuang and Liu for solving two-dimensional space-time and time fractional diffusion equations [37, 38]. In [39], Liu et al. have developed an implicit meshless approach based on the radial basis functions for solving two-dimensional time fractional diffusion equations. In [40], Chen et al. have constructed a two-dimensional anomalous sub-diffusion equation. In [41], Zhang and Sun have proposed two numerical techniques for solving the solution of a two-dimensional anomalous sub-diffusion equation with a time fractional derivative.
It is worth noting that the computational complexity and CPU time are the main problems of applying the numerical algorithms for solving high-dimensional equations, particularly for the systems defined on the large domain. It motivates our interest to propose an efficient and accurate method to avoid the mentioned issue in such problems. Based on the above discussions, the main objective of this paper is to propose an efficient and accurate method based on the VIM upgraded by an auxiliary parameter for solving the following three-dimensional modified anomalous sub-diffusion equation:
where \(\varOmega =[0,a]\times [0,b]\times [0,c]\times [0,T]\), with the initial condition
where \(0<\alpha \), \(\beta , \gamma <1\) and \(\mathcal{A}\), \(\mathcal{B}\), \(\mathcal{C}\) are the positive constants. The symbols \(\frac{ \partial ^{1-\alpha }}{\partial t^{1-\alpha }}\), \(\frac{\partial ^{1- \beta }}{\partial t^{1-\beta }}\) and \(\frac{\partial ^{1-\gamma }}{ \partial t^{1-\gamma }}\) are the Riemann–Liouville fractional derivative operators, defined as follows:
The VIM was proposed by Ji-Huan He [42] as a modification of general Lagrange multipliers method [43]. The main characteristic of the method is the flexibility and the ability to obtain solutions of nonlinear equations accurately and conveniently [44,45,46]. It is worth noting that the identification of Lagrange multipliers is very important in the VIM, but the main problem in the fractional calculus is that the integral by parts in integer order case cannot hold in fractional calculus. The interested reader can consult [47, 48] to identify the Lagrange multiplier by use of the Laplace transform. We recall that there are many modifications of the VIM, among which the Herisanu and Marincas modification is much more attractive, where the VIM is coupled with the least squares method, and it should be noted that one iteration leads to ideal results [49]. In [46], Yilmaz and Inc constructed a variational iteration algorithm, where an auxiliary parameter was introduced to adjust the convergence rate, but they did not give a general rule for the best choice of the auxiliary parameter. This modification was further developed by Hosseini et al., which gave some profitable rules for optimally determination of the auxiliary parameter [50,51,52,53].
In the present paper VIM with an auxiliary parameter is successfully used to obtain an approximate solution of three-dimensional modified anomalous fractional sub-diffusion equation on the large domains. The residual function and its norm two error are defined to choose the auxiliary parameter optimally. The obtained results confirm the reliability and efficiency of the proposed method for such problems on the large domains.
The paper is organized as follows: In Sect. 2, the VIM and VIM with an auxiliary parameter are described. In Sect. 3, the proposed method is described for solving three-dimensional modified anomalous fractional sub-diffusion equation. In Sect. 4, the convergence of the VIM with an auxiliary parameter is discussed. In Sect. 5, some numerical examples are chosen to investigate the applicability of the described approach. Finally, a conclusion is drawn in Sect. 6.
2 The VIM and VIM with an auxiliary parameter
In this section, we briefly review the standard VIM and then the VIM upgraded by an auxiliary parameter.
To illustrate the basic concepts of the VIM, we consider the following partial deferential equation (PDE):
where \(\mathcal{L}\) is a linear operator, \(\mathcal{N}\) is a nonlinear operator, and g is the source term.
In the VIM, a correction functional for Eq. (2.1) can be written as follows:
where λ is a general Lagrange multiplier, which can be identified optimally via the variational theory, \(u_{n}\) is the nth approximate solution, and \(\widetilde{u}_{n}\) denotes a restricted variation, which means \(\delta \widetilde{u}_{n}=0\). After identification of the multiplier, a variational iteration algorithm is constructed as
Accordingly, the following variational iteration formula for (2.1) is highlighted as
Considering Eq. (2.4), an auxiliary parameter h can be inserted into the variational iteration algorithm, to obtain
The approximate solutions \(u_{n+1}(x,y,z,t,h)\), \(n \geq 1\) contain the unknown auxiliary parameter h. The validity of the method is based on the assumption that the approximation \(u_{n+1} (x,y,z,t,h)\), \(n \geq 1\) converges to the exact solution. It is the auxiliary parameter which ensures that this assumption can be satisfied. In general, by means of the error of norm two of the residual function, it is straightforward to choose a proper value for h which approves that the approximate solutions are convergent. In fact, the described methodology approximates the solution more accurately on a large area.
3 Implementation of the proposed method
We construct an iteration formula by applying Eqs. (1.1) and (2.1) as follows:
By taking the variation with respect to \(u_{n}\) and noticing that \(\delta u_{n}(x,y,z,0)=0\), we obtain the stationary conditions
The Lagrangian multiplier can consequently be identified as, \(\lambda (s)=-1\). Substituting \(\lambda (s)=-1\) into the correction functional equation system (3.1) results in the following iteration formula:
So the VIM with an auxiliary parameter is defined as
By starting from \(u_{0}(x,y,z,t)=u(x,y,z,0)\), and using the iterative formula (3.3) for the first few \(n=N\) iterations, we obtain an approximate solution \(u(x,y,z,t)\simeq u_{N}(x,y,z,t,h)\) with an unknown suitable h. In order to find a proper value for h to obtain an accurate approximate solution, we define the following residual function:
and the following error of norm two of the residual function:
Now we apply a numerical integration scheme to calculate \(e_{N}(h)\), approximately. Note that the optimal value of h minimizes the norm two of the residual function.
4 Convergence of the proposed method
Now we investigate the convergence of the proposed method for three-dimensional equation. In the sequel, the linear operator is \(\mathcal{L}=\frac{\partial }{\partial t}\). Also, we define the operator \(\mathcal{F}\) as follows:
where
Moreover, the recurrence scheme can be defined as follows:
and in general for \(n\geq 1\),
Consequently we have
The initial approximation \(u_{0}(x,y,z,t)\) can be freely chosen and the only restriction is satisfaction of the given initial conditions defined in (2) with \(\mathcal{L}u_{0}(x,y,z,t)= 0\). For the approximation purpose, the solution \(u(x,y,z,t,h)=v_{0}(x,y,z,t)+\sum_{n=1}^{\infty }v_{n}(x,y,z,t,h)\) is approximated by the Nth-order truncated series \(u_{N}(x,y,z,t,h)=v_{0}(x,y,z,t)+\sum_{n=1}^{N}v_{n}(x,y,z,t,h)\). The approximate solution \(u_{N}(x,y,z,t,h)\) contains the auxiliary parameter h. It is the auxiliary parameter which ensures that the assumption can be satisfied by means of the error of norm two of the residual function. The following theorems provide the sufficient conditions for convergence and validity of the proposed method.
Theorem 4.1
Let H be a real Hilbert space and \(\mathcal{F}\) be an operator on H. If there is \(h^{\ast }\neq 0\) and \(0<\xi <1\) such that
then the series solution defined in (4.3) with
converges.
Proof
The proof is straightforward by noting the proof of Theorem 4.1 in [53]. □
Theorem 4.2
Let \(\mathcal{L}=\frac{\partial }{\partial t}\). If we have \(u(x,y,z,t)=v _{0}(x,y,z,t)+\sum_{n=1}^{\infty }v_{n}(x,y,z,t,h^{\ast })\), then \(u(x,y,z,t)\), is the exact solution of the problem (1.1).
Proof
The proof is straightforward by noting the proof of Theorem 4.2 in [53]. □
Theorem 4.3
Suppose that the series solution \(u(x,y,z,t)=v_{0}(x,y,z,t)+\sum_{n=1} ^{\infty }v_{n}(x,y,z,t, h^{\ast })\) defined in (4.3), is convergent to the exact solution of the problem (1.1). If the truncated series \(u_{N}(x,y,z,t)=v_{0}(x,y,z,t)+\sum_{n=1}^{N}v_{n}(x,y,z,t,h ^{\ast })\), is used as an approximate solution, then the maximum error is estimated as
Proof
The proof is straightforward by noting the proof of Theorem 4.3 in [53]. □
5 Numerical examples
In this section, some test problems are provided to investigate the practical computational efficiency and reliability of the proposed method.
Example 1
Consider the following three-dimensional modified anomalous fractional sub-diffusion equation:
where
with the initial condition \(u(x,y,z,0)=0\), which admits the exact solution \(u(x,y,z,t)={t}^{1+\alpha +\beta +\gamma }\sin (x+y+z )\).
Take \(\varOmega =[0,8\pi ]\times [0,8\pi ]\times [0,8\pi ]\times [0,2]\). According to the standard VIM, we have the following variational iteration formula:
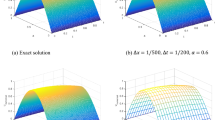
By starting the solution procedure from \(u_{0}(x,y,z,t)=u(x,y,z,0)=0\), we may stop at \(u_{7}(x,y,z,t)\). The graphs of the approximate solution and the absolute error function of \(u_{7}(x,8\pi ,8\pi ,t)\) for \((x,t)\in [0,8\pi ]\times [0,2]\) and \((\alpha =\beta =\frac{1}{4}, \gamma =\frac{1}{2})\) are shown in Figs. 1 and 2 (left side), respectively. Also, the graphs of the absolute error function of \(u_{7}(x,8\pi ,8\pi ,0.5)\) and \(u_{7}(x,8\pi ,8\pi ,1.5)\) for \(x\in [0,8\pi ]\) are shown in Figs. 3 and 4 (left side), respectively. From these figures it can be seen that \(u_{7}(x,y,z,t)\) is not accurate for the large values of x, y, z and t. Now, by applying the recurrence scheme (3.3), we successively have
and in general
In order to find a proper value for h to obtain an accurate approximate solution of (5.1), we define the following residual function:
and the following error defined based on the norm two of residual function:
The minimum point of \(e_{7}(h)\) when \((\alpha =\beta =\frac{1}{4}, \gamma =\frac{1}{2})\) is obtained at \(h\simeq 0.18\) by using Maple software. Substituting \(h =0.18\) in \(u_{7}(x,8\pi ,8\pi ,t,h)\), reduces the absolute error of the 7th-step remarkably. The graphs of the approximate solution and the absolute error functions of \(u_{7}(x,8 \pi ,8\pi ,t,0.18)\) for \((x,t)\in [0,8\pi ]\times [0,2]\) are shown in Figs. 1 (right side) and 2 (right side), respectively. Also, the graphs of the absolute error functions of \(u_{7}(x,8\pi ,8 \pi ,0.5,0.18)\) and \(u_{7}(x,8\pi ,8\pi ,1.5,0.18)\) for \(x\in [0,8 \pi ]\) are shown in Figs. 3 and 4 (right side), respectively. These figures imply that \(u_{7}(x,y,z,t,0.18)\) is a highly accurate approximate solution even for large values of x, y, z and t.

The graphs of the approximate solution \(u(x,8\pi ,8\pi ,t)\) for Example 1 via the standard VIM (left side) and the upgraded VIM with \(h=0.18\) as an auxiliary parameter (right side) in the case \((\alpha =\beta =\frac{1}{4}, \gamma =\frac{1}{2})\)

The graphs of the absolute error function of \(u(x,8\pi ,8\pi ,t)\) for Example 1 via the standard VIM (left side) and the upgraded VIM with \(h=0.18\) as an auxiliary parameter (right side) in the case \((\alpha =\beta =\frac{1}{4}, \gamma =\frac{1}{2})\)

The graphs of the absolute error function of \(u(x,8\pi ,8\pi ,0.5)\) for Example 1 via the standard VIM (left side) and the upgraded VIM with \(h=0.18\) as an auxiliary parameter (right side) in the case \((\alpha =\beta =\frac{1}{4}, \gamma =\frac{1}{2})\)

The graphs of the absolute error function of \(u(x,8\pi ,8\pi ,1.5)\) for Example 1 via the standard VIM (left side) and the upgraded VIM with \(h=0.18\) as an auxiliary parameter (right side) in the case \((\alpha =\beta =\frac{1}{4}, \gamma =\frac{1}{2})\)
Example 2
Consider the following three-dimensional modified anomalous fractional sub-diffusion equation:
where
with the initial condition \(u(x,y,z,0)=0\), and the exact solution \(u(x,y,z,t)=\cos (\pi (x+y+z) )t^{2}\).
According to the standard VIM, we have the following variational iteration formula:
By starting the solution procedure from \(u_{0}(x,y,z,t)=u(x,y,z,0)=0\), we may repeat until to compute \(u_{7}(x,y,z,t)\). The graphs of the approximate solution and the absolute error functions of \(u_{7}(x,40,40,t)\) for \((x,t)\in [0,40]\times [0,2]\) and \((\alpha = \frac{1}{4}, \beta =\frac{1}{2}, \gamma =\frac{3}{4})\) are shown in Figs. 5 (left side) and 6 (left side), respectively. Also, the graphs of the absolute error functions of \(u_{7}(x,40,40,0.5)\) and \(u_{7}(x,40,40,1.5)\) for \(x\in [0,40]\) are, respectively, shown in Figs. 7 and 8 (left side). It can be seen that \(u_{7}(x,y,z,t)\) is not accurate for large values of x, y, z and t. Now, by using the recurrence formula defined in (3.3), we successively have
and in general
In order to find a proper value for h which leads to the accurate approximation, we define the following residual function:
and the following error of norm two of residual function:
The minimum point of \(e_{7}(h)\) when \((\alpha =\frac{1}{4}, \beta = \frac{1}{2}, \gamma =\frac{3}{4})\) is obtained at \(h\simeq 0.18\) by using Maple software. Substituting \(h =0.18\) in \(u_{7}(x,40,40,t,h)\), remarkably reduces the absolute error of approximation method. The graphs of the approximate solution and the absolute error functions of \(u_{7}(x,40,40,t,0.18)\) for \((x,t)\in [0,40]\times [0,2]\) are shown in Figs. 5 (right side) and 6 (right side), respectively. The graphs of the absolute error functions of \(u_{7}(x,40,40,0.5,0.18)\) and \(u_{7}(x,40,40,1.5,0.18)\) for \(x\in [0,40]\) are respectively shown in Figs. 7 and 8 (right side). The demonstrated figures reveal that \(u_{7}(x,y,z,t,0.18)\) is the highly accurate approximate solution even for the large values of x, y, z and t.

The graphs of the approximate solution \(u(x,40,40,t)\) for Example 2 via the standard VIM (left side) and the upgraded VIM with \(h=0.18\) as an auxiliary parameter (right side) in the case \((\alpha =\frac{1}{4}, \beta =\frac{1}{2}, \gamma =\frac{3}{4})\)

The graphs of the absolute error function of \(u(x,40,40,t)\) for Example 2 via the standard VIM (left side) and the upgraded VIM with \(h=0.18\) as an auxiliary parameter (right side) in the case \((\alpha =\frac{1}{4}, \beta =\frac{1}{2}, \gamma =\frac{3}{4})\)

The graphs of the absolute error function of \(u(x,40,40,0.5)\) for Example 2 via the standard VIM (left side) and the upgraded VIM with \(h=0.18\) as an auxiliary parameter (right side) in the case \((\alpha =\frac{1}{4}, \beta =\frac{1}{2}, \gamma =\frac{3}{4})\)

The graphs of the absolute error function of \(u(x,40,40,1.5)\) for Example 2 via the standard VIM (left side) and the upgraded VIM with \(h=0.18\) as an auxiliary parameter (right side) in the case \((\alpha =\frac{1}{4}, \beta =\frac{1}{2}, \gamma =\frac{3}{4})\)
6 Conclusion
The well-known anomalous diffusion equations are an important class of fractional differential equations. Since they have been widely applied in modeling of many phenomena, finding the accurate solution of this system still is of interest for many researchers. In this paper, a three-dimensional modified anomalous fractional sub-diffusion equation defined on the large domain has been studied. The VIM with an auxiliary parameter which is famed for computational efficiency on the large domain, was proposed and scrutinized. This method provides a simple way to extend the convergence region for the approximate solutions. An optimal auxiliary parameter was determined by the error of norm two of the residual function. The experimental results and graphical representations confirm the reliability and the efficiency of the proposed method. In the future, the problem investigated in this paper might be solved by other numerical methodologies like those discussed in [54, 55].
References
Podlubny, I.: Fractional Differential Equations. Academic Press, New York (1999)
Meerschaert, M.M., Benson, D., Baeumer, B.: Operator Lévy motion and multiscaling anomalous diffusion. Phys. Rev. E 63, 1112–1117 (2001)
Solomon, T.H., Weeks, E.R., Swinney, H.L.: Observations of anomalous diffusion and Lévy flights in a 2-dimensional rotating flow. Phys. Rev. Lett. 71, 3975–3979 (1993)
Yuste, S.B., Lindenberg, K.: Subdiffusion-limited \(A + A\) reactions. Phys. Rev. Lett. 87, 118301 (2001)
Raberto, M., Scalas, E., Mainardi, F.: Waiting-times and returns in high-frequency financial data: an empirical study. Physica A 314, 749–755 (2002)
Mainardi, F., Raberto, M., Gorenflo, R., Scalas, E.: Fractional calculus and continuous-time finance II: the waiting-time distribution. Physica A 287, 468–481 (2000)
Benson, D.A., Wheatcraft, S.W., Meerschaert, M.M.: Application of a fractional advection?dispersion equation. Water Resour. Res. 36, 1403–1412 (2000)
Ren, J., Sun, Z., Zhao, X.: Compact difference scheme for the fractional sub-diffusion equation with Neumann boundary conditions. J. Comput. Phys. 232, 456–467 (2013)
Tayebi, A., Shekari, Y., Heydari, M.H.: A meshfree approach for solving 2D variable-order fractional nonlinear diffusion-wave equation. Comput. Methods Appl. Mech. Eng. 350, 154–168 (2019)
Heydari, M.H., Avazzadeh, Z., Yang, Y.: A computational method for solving variable-order fractional nonlinear diffusion-wave equation. Appl. Math. Comput. 352, 235–248 (2019)
Heydari, M.H., Hooshmandasl, M.R., Cattani, C., Hariharan, G.: An optimization wavelet method for multi variable-order fractional differential equations. Fundam. Inform. 153(3–4), 173–198 (2017)
Heydari, M.H., Avazzadeh, Z., Farzi Haromi, M.: A wavelet approach for solving multi-term variable-order time fractional diffusion-wave equation. Appl. Math. Comput. 341, 215–228 (2019)
Heydari, M.H., Avazzadeh, Z.: Legendre wavelets optimization method for variable-order fractional Poisson equation. Chaos Solitons Fractals 112, 180–190 (2018)
Heydari, M.H., Avazzadeh, Z.: A new wavelet method for variable-order fractional optimal control problems. Asian J. Control 20(5), 1–14 (2018)
Heydari, M.H., Avazzadeh, Z.: An operational matrix method for solving variable-order fractional biharmonic equation. Comput. Appl. Math. 37(4), 4397–4411 (2018)
Heydari, M.H.: A new direct method based on the Chebyshev cardinal functions for variable-order fractional optimal control problems. J. Franklin Inst. 355, 4970–4995 (2018)
Hajipour, M., Jajarmi, A., Baleanu, D., Sun, H.G.: On an accurate discretization of a variable-order fractional reaction–diffusion equation. Commun. Nonlinear Sci. Numer. Simul. 69, 119–133 (2019)
Baleanu, D., Jajarmi, A., Asad, J.H.: Classical and fractional aspects of two coupled pendulums. Rom. Rep. Phys. 71(1), 103 (2019)
Baleanu, D., Sadat, S., Jajarmi, A., Asad, J.H.: New features of the fractional Euler–Lagrange equations for a physical system within non-singular derivative operator. Eur. Phys. J. Plus 134, 181 (2019)
Baleanu, D., Asad, J.H., Jajarmi, A.: New aspects of the motion of a particle in a circular cavity. Proc. Rom. Acad., Ser. A: Math. Phys. Tech. Sci. Inf. Sci. 19(2), 361–367 (2018)
Metzler, R., Klafter, J.: The random walk’s guide to anomalous diffusion: a fractional dynamics approach. Phys. Rep. 339, 1–77 (2000)
Kilbas, A., Srivastava, H., Trujillo, J.: Theory and Applications of Fractional Differential Equations. Elesvier, Boston (2006)
Schneider, W., Wyss, W.: Fractional diffusion and wave equations. J. Math. Phys. 30, 134–144 (1989)
Mainardi, F.: The fundamental solutions for the fractional diffusion-wave equation. Appl. Math. Lett. 9, 23–28 (1996)
Gorenflo, R., Iskenderov, A., Luchko, Y.: Mapping between solutions of fractional diffusion-wave equations. Fract. Calc. Appl. Anal. 3, 75–86 (2000)
Agrawal, O.: Solution for a fractional diffusion-wave equation defined in a bounded domain. Nonlinear Dyn. 29, 145–155 (2002)
Huang, F., Liu, F.: The time fractional diffusion and advection–dispersion equation. ANZIAM J. 46, 317–330 (2005)
Yuste, S., Acedo, L.: An explicit finite difference method and a new von Neumann-type stability analysis for fractional diffusion equations. SIAM J. Numer. Anal. 42, 1862–1874 (2005)
Yuste, S.: Weighted average finite difference methods for fractional diffusion equations. J. Comput. Phys. 216, 264–274 (2006)
Sun, Z., Wu, X.: A fully discrete difference scheme for a diffusion-wave system. Appl. Numer. Math. 56, 193–209 (2006)
Chen, C., Liu, F., Turner, I., Anh, V.: A Fourier analysis method for the fractional diffusion equation describing sub-diffusion. J. Comput. Phys. 227, 886–897 (2007)
Li, X., Xu, C.: A space-time spectral method for the time fractional diffusion equation. SIAM J. Numer. Anal. 47, 2108–2131 (2009)
Abbaszadeh, M., Mohebbi, A.: A fourth-order compact solution of the two-dimensional modified anomalous fractional sub-diffusion equation with a nonlinear source term. Comput. Math. Appl. 66, 1345–1359 (2013)
Heydari, M.H., Hooshmandasl, M.R., Ghaini, F.M.M., Cattani, C.: Wavelets method for the time fractional diffusion-wave equation. Phys. Lett. A 379, 71–76 (2015)
Mohebbi, A., Abbaszadeh, M., Dehghan, M.: Solution of two-dimensional modified anomalous fractional sub-diffusion equation via radial basis functions (RBF) meshless method. Eng. Anal. Bound. Elem. 38, 72–82 (2014)
Heydari, M.H., Hooshmandasl, M.R., Cattani, C.: Numerical solution of fractional sub-diffusion and time-fractional diffusion-wave equations via fractional-order Legendre functions. Eur. Phys. J. Plus 131, 268–290 (2016)
Zhuang, P., Liu, F.: Implicit difference approximation for the two-dimensional space-time fractional diffusion equation. J. Appl. Math. Comput. 25, 269–282 (2007)
Zhuang, P., Liu, F.: Finite difference approximation for two-dimensional time fractional diffusion equation. J. Algorithms Comput. Technol. 1(1), 1–15 (2007)
Liu, Q., Gu, Y., Zhuang, P., Liu, F., Nie, Y.: An implicit RBF meshless approach for time fractional diffusion equations. Comput. Mech. 48(1), 1–12 (2001)
Chen, C., Liu, F., Turner, I., Anh, V.: Numerical schemes and multivariate extrapolation of a two-dimensional anomalous sub-diffusion equation. Numer. Algorithms 54, 1–21 (2010)
Zhang, Y., Sun, Z.: Alternating direction implicit schemes for the two-dimensional fractional sub-diffusion equation. J. Comput. Phys. 230, 8713–8728 (2011)
He, J.: Variational iteration method—a kind of nonlinear analytical technique: some examples. Int. J. Non-Linear Mech. 34, 699–708 (1999)
Inokuti, M., Sekine, H., Mur, T.: General Use of the Lagrange Multiplier in Nonlinear Mathematical Physics. Pergamon, New York (1978)
Herisanu, N., Marinca, V.: A modified variational iteration method for strongly nonlinear problems. Nonlinear Sci. Lett. A, Math. Phys. Mech. 1(2), 183–192 (2010)
Noor, M.A., Mohyud-Din, S.: Variational iteration method for solving higher-order nonlinear boundary value problems using He’s polynomials. Int. J. Nonlinear Sci. Numer. Simul. 9(2), 141–156 (2008)
Yilmaz, E., Inc, M.: Numerical simulation of the squeezing flow between two infinite plates by means of the modified variational iteration method with an auxiliary parameter. Nonlinear Sci. Lett. A, Math. Phys. Mech. 1(3), 297–306 (2010)
Wu, G.C., Baleanu, D.: Variational iteration method for fractional calculus—a universal approach by Laplace transform. Adv. Differ. Equ. 2013, 18 (2013)
Wu, G.C., Baleanu, D.: New applications of the variational iteration method—from differential equations to q-fractional difference equations. Adv. Differ. Equ. 2013, 21 (2013)
Herisanu, N., Marinca, V.: A modified variational iteration method for strongly nonlinear problems. Nonlinear Sci. Lett. A, Math. Phys. Mech. 1(2), 183–192 (2010)
Hosseini, M.M., Mohyud-Din, S., Ghaneai, H., Usman, M.: Auxiliary parameter in the variational iteration method and its optimal determination. Int. J. Nonlinear Sci. Numer. Simul. 11(7), 495–502 (2010)
Hosseini, M., Mohyud-Din, S., Ghaneai, H.: Variational iteration method for nonlinear age-structured population models using auxiliary parameter. Z. Naturforsch. A 65(12), 11–37 (2010)
Hosseini, M.M., Mohyud-Din, S., Ghaneai, H.: Variational iteration method for Hirota–Satsuma coupled KdV equation using auxiliary parameter. Int. J. Numer. Methods Heat Fluid Flow 22(3), 277–286 (2012)
Ghaneai, H., Hosseini, M.M.: Variational iteration method with an auxiliary parameter for solving wave-like and heat-like equations in large domains. Comput. Math. Appl. 65(9), 363–373 (2015)
Hajipour, M., Jajarmi, A., Baleanu, D.: On the accurate discretization of a highly nonlinear boundary value problem. Numer. Algorithms 79(3), 679–695 (2018)
Hajipour, M., Jajarmi, A., Malek, A., Baleanu, D.: Positivity-preserving sixth-order implicit finite difference weighted essentially non-oscillatory scheme for the nonlinear heat equation. Appl. Math. Comput. 325, 146–158 (2018)
Funding
Zakieh Avazzadeh wishes to express gratitude to the Natural Science Foundation of Jiangsu Province (Grant No. BK20150964) and the National Natural Science Foundation of China (Grant No. 11671210).
Author information
Authors and Affiliations
Contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Ma, Z., Heydari, M.H., Avazzadeh, Z. et al. An efficient iterative approach for three-dimensional modified anomalous fractional sub-diffusion equations on a large domain. Adv Differ Equ 2019, 367 (2019). https://doi.org/10.1186/s13662-019-2302-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-019-2302-2