
Abstract
In this paper, we investigate the sufficient conditions that guarantee the stability, continuity, and boundedness of solutions for a type of second-order stochastic delay integro-differential equation (SDIDE).
To demonstrate the main results, we employ a Lyapunov functional. An example is provided to demonstrate the applicability of the obtained result, which includes the results of this paper and obtains better results than those available in the literature.
Similar content being viewed by others


1 Introduction
An integral equation is a mathematical expression that includes a required function under an integration sign. Such equations often describe an elementary or a complex physical process wherein the characteristics at a given point depend on values in the whole domain and cannot be defined only on the bases of the values near the given point.
A differential equation is said to be an integro-differential equation (IDE) if it contains the integrals of the unknown function. Most frequently, integral equations as well as IDEs are found in such problems of heat and mass transfer as diffusion, potential theory, and radiation heat transfer. Integral equations have a lot of applications such as actuarial science (ruin theory), computational electromagnetics, inverse problems, for example, Marchenko equation (inverse scattering transform), options pricing under jump-diffusion, radiative transfer, and viscoelasticity (see, for example, [12, 13, 17, 37, 39, 47] and the references cited in therein).
In biological applications, the population dynamics and genetics are modeled by a system of IDEs (see Kheybari et al. [19]). Next, initial value problems for a nonlinear system of IDEs are used to model the competition between tumor cells and the immune system (see Nicola et al. [9]).
Besides, in engineering, two systems of specific inhomogeneous IDEs are studied to examine the noise term phenomenon (see Wazwaz [46]). In addition, the scattered electromagnetic fields from resistive strips and RLC circuits are governed by IDEs (see Hatamzadeh et al. [16]).
An IDE is said to have a delay when the rate of variation in the equation state depends on past states. In this case such an IDE is called delay integro-differential equation (DIDE).
Numerous sectors of science and technology, including biology, medicine, engineering, information systems, control theory, and finance mathematics, have utilized the stability and boundedness qualities of solutions for IDEs with and without delays.
The Lyapunov’s direct method, which includes an energy-like function, has proven to be an effective tool in the qualitative study of ordinary differential equations (ODEs). Many researchers have used this technique to solve delay differential equations (DDEs) and IDEs over the last five decades. In contrast to Lyapunov functionals, which are frequently employed in the study of DDEs and IDEs (see, for instance, Burton [11, 40]).
The basic theory of stochastic differential equations (SDEs) has been systematically established in [8, 14, 30, 32, 34]. There are many interesting results in the literature on the stability and boundedness of solutions for stochastic delay differential equations (SDDEs), see, for example, [18, 20, 21, 28, 29, 36] and others.
To the best of our information, we observe that only a few excellent and interesting works on the stochastic stability and boundedness of solutions for second-, third-, and fourth-order SDDEs have been developed in [1–6, 22–24, 26, 27, 38, 45] (see also the references of these sources).
There are a number of results on the qualitative characteristics of first-, second-, and third-order IDEs with and without delays, but none on the qualitative characteristics of solutions for a particular class of second-order SDIDE.
The qualitative properties of DIDEs for the second- and third-order have been considered by numerous authors such as Adeyanju et al. [7], Bohner and Tunç [10], Graef and Tunç [15], Mohammed [31], Napoles [33], Pinelas and Tunç [35], Tunç and Ayhan [41, 42], Tunç [44], and Zhao and Meng [48] (see also the references therein). To the best of our knowledge, this is the first attempt on the subject in the second-order SDIDE literature.
As a result, the goal of this paper is to investigate the stability, continuity, and boundedness of solutions for a type of second-order SDIDE as follows:
where \(\tau (t)\) is a variable delay with \(0\leq \tau (t)\leq \gamma \), γ is a positive constant that will be determined later, \(\dot{\tau}(t)\leq \beta \), \(\beta \in (0,1)\).
The functions Q and R are continuous differentiable functions such that \(Q\in C(\mathbb{R}^{2}, \mathbb{R})\) and \(R \in C(\mathbb{R}, \mathbb{R})\) for all \(R(x)\neq 0\), \(R(0)=0\) and \(Q(0,0)=0\). The functions \(P\in C(\mathbb{R}^{+}\times \mathbb{R}^{2}, \mathbb{R})\), \(f\in C(\mathbb{R}^{+}\times \mathbb{R}, \mathbb{R})\), \(f(t,0)=0\), and \(\mathcal{C}\in C(\mathbb{R}^{+}\times \mathbb{R}^{+}, \mathbb{R})\) is such that \(\mathcal{C}(t,s)\) is a continuous function for \(0\leq s\leq t<\infty \), \(g(t,x(t))\) is a continuous function, and \(\omega (t)\in \mathbb{R}^{m}\) is a standard Wiener process.
Equation (1.1) can be expressed in the following system form:
where
In addition, it is supposed that the derivatives \(Q_{x}(x,y)=\frac{\partial Q}{\partial x}(x,y)\) and \(R'(x)=\frac{dR}{dx}(x)\) exist and are continuous.
Let us consider the n-dimensional SDDE (see [25, 43]):
with the initial condition \(x_{0}\in \mathcal{C}([-r,0];\mathbb{R}^{n})\). Suppose that \(F :\mathbb{R}^{+}\times \mathbb{R}^{2n}\rightarrow \mathbb{R}^{n}\) and \(G:\mathbb{R}^{+}\times \mathbb{R}^{2n}\rightarrow \mathbb{R}^{n \times m}\) are measurable functions such that \(F(t,0)=0\) and \(G(t,0)=0\).
To formulate the stability and boundedness criteria, we suppose that \(C^{1,2}(\mathbb{R}^{+} \times \mathbb{R}^{n};\mathbb{R}^{+})\) denotes the family of all nonnegative Lyapunov functionals \(W(t,x_{t})\) defined on \(\mathbb{R}^{+} \times \mathbb{R}^{n}\), which are twice continuously differentiable in x and one in t. By Itô’s formula, we have
where
with \(W_{t}=\frac{\partial W}{\partial t}\), \(W_{x}=(\frac{\partial W}{\partial x_{1}},\ldots , \frac{\partial W}{\partial x_{n}})\) and
2 Stochastic qualitative results
We introduce the following hypotheses before proving our main results.
Assume that there are positive constants \(f_{0}\), \(g_{0}\), \(p_{0}\), \(c_{0}\), \(\alpha _{0}\), α, \(K^{\ast}\), c, d, and N that satisfy the following conditions:
-
(i)
\(|f(t,y)|\leq f_{0}|y|\) for all \(t\in \mathbb{R}^{+}\) and \(y\in \mathbb{R}\);
-
(ii)
\(P(t,x,y)\geq p_{0}>0\) and \(g(t,x)\leq g_{0} x\) for all \(t \in \mathbb{R^{+}}\) and \(x,y \in \mathbb{R}\);
-
(iii)
\(Q(0,0)=0\), \(c\leq \frac{Q(x,y)}{x}\leq c_{0}\) for \(x\neq 0\) and \(|\frac{\partial Q}{\partial x}(x,y)|\leq d\) for all \(x,y \in \mathbb{R}\);
-
(iv)
\(\alpha \leq \frac{R(x)}{x}\leq \alpha _{0}\) for \(x\neq 0\) and \(|R'(x)|\leq K^{\ast}\) for all \(x \in \mathbb{R}\);
-
(v)
\(\max \{f_{0}^{2}\int _{t}^{\infty}|\mathcal{C}(u,s)|\,du , \int _{0}^{t}| \mathcal{C}(t,s)|\,ds \}< N\);
-
(vi)
There are \(\gamma >0\) and \(\beta \in (0,1)\) such that \(0\leq \tau (t)\leq \gamma \) and \(\dot{\tau}(t)\leq \beta \).
The following theorem is the first result of this paper.
Theorem 2.1
Let conditions (i)–(vi) hold. Then all the solutions of system (1.2) are continuous and bounded provided that
with
Proof
The proof of this theorem rests on the differentiable scalar Lyapunov functional \(V(t):=V(t, x_{t}, y_{t})\) defined as follows:
where λ is a positive constant that will be determined later.
In view of assumptions (iii) and (iv), we obtain
It follows that
Then we obtain
Hence, it is clear that there exists a sufficiently small positive constant \(\delta _{1}\) such that
where
As a result, the Lyapunov functional \(V(t)\) is positive definite at all \((x,y)\) points and zero only at \(x=y=0\).
Itô’s formula (1.4) gives the derivative of the Lyapunov functional \(V(t)\) in (2.1) along any solution \((x(t),y(t))\) of system (1.2) as follows:
It follows that
By assumption (i), we get the following inequality:
From the inequality \(2|mn|\leq m^{2}+n^{2}\), we get the following relations:
In the same way, we obtain
The following estimations can be confirmed using assumptions (ii)–(iv) and the inequality \(2|mn|\leq m^{2}+n^{2}\):
Hence, in view of assumptions (iii), (iv) and by using the inequality \(2|mn|\leq m^{2}+n^{2}\), we can conclude that
Similar to the preceding, we have
By adding the above two inequalities and since \(0\leq \tau (t)\leq \gamma \), we get the following:
Furthermore, from condition (vi), it follows that
By considering the preceding inequalities (2.4)–(2.8) in the derivative (2.3), we can arrive at
With some rearrangement of terms, we can get
Then, from condition (v), we obtain
If we now choose
then we can observe
If we take
then there exists a positive constant \(\delta _{2}\) such that
This implies that \(\mathcal{L}V(t)\leq 0\). Because of all functions appearing in (1.1), it is obvious that there exists at least one solution of (1.1) defined on \([t_{0}, t_{0}+\rho )\) for some \(\rho >0\).
It is necessary to show that the solution can be extended onto the entire interval \([t_{0}, \infty )\). We suppose on the contrary that there is a first time \(T<\infty \) such that the solution exists on \([t_{0}, T)\) and
Suppose that \((x(t), y(t))\) is a solution of system (1.2) with the initial condition \((x_{0}, y_{0})\). Since the Lyapunov functional \(V(t)\) is a positive definite and decreasing functional on the trajectories of system (1.2), also we have
Then we can say that \(V(t)\) is bounded on \([t_{0}, T)\). Now, integrating the above inequality from \(t_{0}\) to T, we have
Hence, it follows from (2.2) that
This inequality implies that \(|x(t)|\) and \(|y(t)|\) are bounded on \(t\rightarrow T^{-}\). Thus, we conclude that \(T<\infty \) is not possible, we must have \(T=\infty \).
This completes the proof of Theorem 2.1. □
Theorem 2.2
If assumptions (i)–(vi) of Sect. 2hold, then the null solution of system (1.2) is uniformly stochastically asymptotically stable.
Proof
From (2.1), using assumptions (iii) and (iv) and the inequality \(2|mn|\leq m^{2}+n^{2}\), we have
where
Then, from conditions (i) and (v), we obtain
Therefore, by combining the two inequalities (2.2) and (2.11), we get
It follows from (2.10) and (2.12) that the Lyapunov functional \(V(t)\) satisfies the following inequalities:
Thus, by taking note of how the discussion above developed, the stability theorems 1 and 2 in [8, 30, 45] were established.
This completes the proof of Theorem 2.2. □
3 Example
In this section, we consider an example of how to illustrate the results for second-order SDIDE.
Then we can express (3.1) as the equivalent system:
When we compare systems (3.2) and (1.2), we see the following relationships:
The functions \(\frac{R(x)}{x}\) and \(R'(x)\) with their bounds are shown in Fig. 1.

Behaviors of the functions \(\frac{R(x)}{x}\) and \(R'(x)\) for \(x\in [-40, 40]\)
In Fig. 2, the behaviours of the functions \(\frac{Q(x,y)}{x}\), (\(x\neq0\)), were plotted in \([-20, 20]\) by MATLAB software.

The behavior of the functions \(\frac{Q(x,y)}{x}\) for \(x\in [-20, 20]\)
The shape and path of \(\tau (t)\) and \(\dot{\tau}(t)\) are shown in Fig. 3.

The paths of the functions \(\tau (t)\) and \(\dot{\tau}(t)\) for \(t\in [-20, 20]\)
Then we obtain
Therefore, we get
We can estimate the following from the information above:
Finally, if
then the null solution of (3.1) is uniformly stochastically asymptotically stable.
Thus, all the conditions of Theorems 2.1 and 2.2 are fulfilled. Therefore, their results hold.
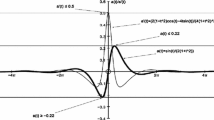
In Fig. 4, the nonlinear SDIDE (3.1) of second order was solved by MATLAB software.

Trajectory of the solution to (3.1) for time t with \(x(t)\)
In Fig. 5, the nonlinear SDIDE (3.1) of second order without stochastic term was solved by MATLAB software.

Trajectory of the solution for (3.1) without stochastic term
In Fig. 6, the nonlinear SDIDE (3.1) of second order with stochastic term that equals 30 was solved by MATLAB software.

Trajectory of the solution of (3.1) with stochastic term equals 30
As a result, we may say that all the solutions of equation (3.1) are stable, continuous, and bounded.
4 Conclusions
In this paper, a class of second-order SDIDE has been considered. Three new results have been given on the qualitative properties of solutions for the investigated equation. The proofs of the results are based on the construction of a new Lyapunov functional. To the best of our knowledge, the considered SDIDE has not been investigated in the literature to date. This work has contributed to the qualitative properties of ordinary, delay, stochastic, and integro differential equations of the second order.
Data availability
No data were generated or analyzed during the current study.
References
Abou-El-Ela, A.M.A., Sadek, A.I., Mahmoud, A.M.: On the stability of solutions for certain second order stochastic delay differential equations. Differ. Uravn. Protsessy Upr. 2, 1–13 (2015)
Abou-El-Ela, A.M.A., Sadek, A.I., Mahmoud, A.M., Farghaly, E.S.: Asymptotic stability of solutions for a certain non-autonomous second order stochastic delay differential equation. Turk. J. Math. 41(3), 576–584 (2017)
Abou-El-Ela, A.M.A., Sadek, A.I., Mahmoud, A.M., Taie, R.O.A.: On the stochastic stability and boundedness of solutions for stochastic delay differential equation of the second order. Chin. J. Math. 2015, Art. ID 358936 (2015)
Ademola, A.T., Akindeinde, S.O., Ogundare, B.S., Ogundiran, M.O., Adesina, O.A.: On the stability and boundedness of solutions to certain second order nonlinear stochastic delay differential equations. J. Niger. Math. Soc. 38(2), 185–209 (2019)
Ademola, A.T., Moyo, S., Ogundare, B.S., Ogundiran, M.O., Adesina, O.A.: Stability and boundedness of solutions to a certain second order non-autonomous stochastic differential equation. Int. J. Anal. 2016, Art. ID 2012315 (2016)
Adesina, O.A., Ademola, A.T., Ogundiran, M.O., Ogundare, B.S.: Stability, boundedness and unique global solutions to certain second order nonlinear stochastic delay differential equations with multiple deviating arguments. Nonlinear Stud. 26(1), 71–94 (2019)
Adeyanju, A.A., Ademola, A.T., Ogundare, B.S.: On stability, boundedness and integrability of solutions of certain second order integro-differential equations with delay. Sarajevo J. Math. 17(30), 61–77 (2021)
Arnold, L.: Stochastic Differential Equations: Theory and Applications. Wiley, New York (1974)
Bellomo, N., Firmani, B., Guerri, L.: Bifurcation analysis for a nonlinear system of integro-differential equations modelling tumor-immune cells competition. Appl. Math. Lett. 12(2), 39–44 (1999)
Bohner, M., Tunç, O.: Qualitative analysis of integro-differential equations with variable retardation. Discrete Contin. Dyn. Syst., Ser. B 27(2), 639–657 (2022)
Burton, T.A.: Construction of Liapunov functionals for Volterra equations. J. Math. Anal. Appl. 85(1), 90–105 (1982)
Burton, T.A.: Volterra Integral and Differential Equations. Academic Press, New York (1983)
Corduneanu, C.: Integral Equations and Applications. Cambridge University Press, Cambridge (1991)
Gikhman, I.I., Skorokhod, A.V.: Stochastic Differential Equations. Springer, Berlin (1972)
Graef, J., Tunç, C.: Continuability and boundedness of multi-delay functional integro-differential equations of the second order. Rev. R. Acad. Cienc. Exactas Fís. Nat., Ser. A Mat. 109(1), 169–173 (2015)
Hatamzadeh-Varmazyar, S., Naser-Moghadasi, M., Babolian, E., Masouri, Z.: Numerical approach to survey the problem of electromagnetic scattering from resistive strips based on using a set of orthogonal basis functions. Prog. Electromagn. Res. 81, 393–412 (2008)
Jerri, A.J.: Introduction to Integral Equations with Applications, 2nd edn. Wiley-Interscience, New York (1999)
Khasminskii, R.Z.: Stochastic Stability of Differential Equations. Sijthoff & Noordhoff, Germantown (1980)
Kheybari, S., Darvishi, M.T., Wazwaz, A.M.: A semi-analytical approach to solve integro-differential equations. J. Comput. Appl. Math. 317, 17–30 (2017)
Kushner, G.J.: Stochastic Stability and Control. World Publ. Co., Moscow (1969)
Liu, R., Raffoul, Y.: Boundedness and exponential stability of highly nonlinear stochastic differential equations. Electron. J. Differ. Equ. 2009, 143 (2009)
Mahmoud, A.M., Ademola, A.T.: On the behaviour of solutions to a kind of third order neutral stochastic differential equation with delay. Adv. Cont. Discr. Mod. 2022, 28 (2022)
Mahmoud, A.M., Adewumi, A.O., Ademola, A.T.: Stochastic stability of solutions for a fourth-order stochastic differential equation with constant delay. J. Inequal. Appl. 2023, 148 (2023)
Mahmoud, A.M., Bakhit, D.A.M.: On the properties of solutions for nonautonomous third order stochastic differential equation with a constant delay. Turk. J. Math. 47(1), 135–158 (2023)
Mahmoud, A.M., Bakhit, D.A.M.: On behaviours for the solution to a certain third-order stochastic integro-differential equation with time delay. Filomat 38(2), 487–504 (2024)
Mahmoud, A.M., Elamin, A.A.M.A., Elhussein, S.E.A., Eboelhasan, M.E.: Some qualitative properties of solutions for multi-delay nonautonomous stochastic Liénard equation. Dyn. Syst. Appl. 32, 81–101 (2023)
Mahmoud, A.M., Tunç, C.: Boundedness and exponential stability for a certain third order stochastic delay differential equation. Dyn. Syst. Appl. 29(2), 288–302 (2020)
Mao, X.: Stability of Stochastic Differential Equations with Respect to Semimartingales. Longman, Harlow (1991)
Mao, X.: Exponential Stability of Stochastic Differential Equations. Dekker, New York (1994)
Mao, X.: Stochastic Differential Equations and Applications, 2nd edn. Horwood, Chichester (2008)
Mohammed, S.A.: Existence, boundedness and integrability of global solutions to delay integro-differential equations of second order. J. Taibah Univ. Sci. 14(1), 235–243 (2020)
Mohammed, S.E.A.: Stochastic Functional Differential Equations. Pitman Advanced Publishing Program, Boston (1984)
Napoles, J.E.: A note on the boundedness of an integro-differential equation. Quaest. Math. 24(2), 213–216 (2001)
Oksendal, B.: Stochastic Differential Equations (An Introduction with Applications). Springer, Heidelberg (2000)
Pinelas, S., Tunç, O.: Solution estimates and stability tests for nonlinear delay integro-differential equations. Electron. J. Differ. Equ. 2022, 68 (2022)
Raffoul, Y.N., Ren, D.: Theorems on boundedness of solutions to stochastic delay differential equations. Electron. J. Differ. Equ. 2016, 194 (2016)
Rahman, M.: Integral Equations and Their Applications. WIT Press, Boston (2007)
Sakthivel, R., Ren, Y., Kim, H.: Asymptotic stability of second order neutral stochastic differential equations. J. Math. Phys. 51(5), 1–9 (2010)
Santanu, S.R.: Stochastic Integral and Differential Equations in Mathematical Modelling. World Scientific, Hackensack (2023)
Thygesen, U.H.: A survey of Lyapunov techniques for stochastic differential equations. IMM Technical Report Nc. (1997)
Tunç, C., Ayhan, T.: Global existence and boundedness of solutions of a certain nonlinear integro-differential equation of second order with multiple deviating arguments. J. Inequal. Appl. 2016, 46 (2016)
Tunç, C., Ayhan, T.: Continuability and boundedness of solutions for a kind of nonlinear delay integro-differential equations of the third-order. J. Math. Sci. 236(3), 354–366 (2019)
Tunç, C., Oktan, Z.: Improved new qualitative results on stochastic delay differential equations of second-order. Comput. Methods Differ. Equ. 12(1), 67–76 (2024)
Tunç, O.: New qualitative results to delay integro-differential equations. Int. J. Nonlinear Anal. Appl. 13(2), 1131–1141 (2022)
Tunç, O., Tunç, C.: On the asymptotic stability of solutions of stochastic differential delay equations of second order. J. Taibah Univ. Sci. 13(1), 875–882 (2019)
Wazwaz, A.M.: The existence of noise terms for systems of inhomogeneous differential and integral equations. Appl. Math. Comput. 146(1), 81–92 (2003)
Wazwaz, A.M.: Linear and Nonlinear Integral Equations. Methods and Applications. Springer, Beijing (2011)
Zhao, J., Meng, F.: Stability analysis of solutions for a kind of integro-differential equations with a delay. Math. Probl. Eng. 2018, Art. ID 9519020 (2018)
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
All authors contributed equally and significantly in writing this article.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mahmoud, A.M., Tunç, C. On the qualitative behaviors of stochastic delay integro-differential equations of second order. J Inequal Appl 2024, 35 (2024). https://doi.org/10.1186/s13660-024-03085-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13660-024-03085-6