
Abstract
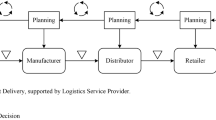
The supply chain network is a complex nonlinear system that may have a chaotic behavior. This network involves multiple entities that cooperate to meet customers demand and control network inventory. Although there is a large body of research on measurement of chaos in the supply chain, no proper method has been proposed to control its chaotic behavior. Moreover, the dynamic equations used in the supply chain ignore many factors that affect this chaotic behavior. This paper offers a more comprehensive modeling, analysis, and control of chaotic behavior in the supply chain. A supply chain network with a centralized decision-making structure is modeled. This model has a control center that determines the order of entities and controls their inventories based on customer demand. There is a time-varying delay in the supply chain network, which is equal to the maximum delay between entities. Robust control method with linear matrix inequality technique is used to control the chaotic behavior. Using this technique, decision parameters are determined in such a way as to stabilize network behavior.













Similar content being viewed by others

References
Bearzotti LA, Salomone E and Chiotti OJ (2012). An autonomous multi-agent approach to supply chain event management. International Journal of Production Economics 135(1), 468–478.
Boyd S, Ghaoui LE, Feron E and Balakrishnan V (1994). Linear Matrix Inequalities in Systems and Control Theory. SIAM: Philadelphia, PA.
Chen L and Chen GR (2000). Fuzzy modeling, prediction, and control of uncertain chaotic systems based on time series. IEEE Transactions on Circuits and Systems I 47(10), 1527–1531.
Chen F and Zhang W (2007). LMI criteria for robust chaos synchronization of a class of chaotic systems. Nonlinear Analysis 67(12), 3384–3393.
Chiang TY, Hung ML, Yan JJ, Yang YS and Chang JF (2007). Sliding mode control for uncertain unified chaotic system with input nonlinearity. Chaos, Solitons & Fractals 34(2), 437–442.
Dadras S and Momeni HR (2010). Control of a fractional-order economical system via sliding mode. Physica A 389(12), 2434–2442.
Daganzo CF (2003). A Theory of Supply Chains. Springer: Heidelberg.
Daganzo CF (2004). On the stability of supply chain. Operations Research 52(6), 909–921.
Dejonckheere J, Disney SM, Lambrecht MR and Towil DR (2002). Transfer function analysis of forecasting induced bullwhip in supply chain. International Journal of Production Economics 78(2), 133–144.
Dejonckheere J, Disney SM, Lambrecht MR and Towill DR (2003). Measuring and avoiding the bullwhip effect: A control theoretic approach. European Journal of Operational Research 147(3), 567–590.
Disney SM, Farasyn I, Lambrecht SM, Towill DR and Van de Velde W (2006). Taming the bullwhip effect whilst watching customer service in a single echelon of supply chain. European Journal of Operational Research 173(1), 151–172.
Disney SM and Towill DR (2003). The effect of vender managed inventory (VMI) dynamics on the bullwhip effect in supply chains. International Journal of Production Economics 85(2), 199–215.
Du J, Huang T, Sheng Z and Zhang H (2010). A new method to control chaos in an economic system. Applied Mathematics and Computation 217(6), 2370–2380.
Forrester JW (1961). Industrial Dynamics. MIT Press: Cambridge.
Fradkov AL and Evans RJ (2005). Control of chaos: Methods and applications in engineering. Annual Reviews in Control 29(1), 33–56.
Goksu A, Kocamaz UE and Uyaroglu Y (2015). Synchronization and control of a chaos in supply chain management. Computers & Industrial Engineering 86, 107–115.
Holyst JA and Urbanowicz K (2000). Chaos control in economical model by time-delayed feedback method. Physica A 287(3), 587–598.
Hu HY (1997). An adaptive control scheme for recovering periodic motion of chaotic systems. Journal of Sound and Vibration 199(2), 269–274.
Hwarng HB and Xie N (2008). Understanding supply chain dynamics: A chaos perspective. European Journal of Operational Research 184(3), 1163–1178.
Ivanov D and Sokolov B (2013). Control and system-theoretic identification of the supply chain dynamics domain for planning, analysis and adaptation of performance under uncertainty. European Journal of Operational Research 224(2), 313–323.
Jarmain WE (1963). Problems in Industrial Dynamics. MIT Press: Cambridge.
Jarsulic M (1993). A nonlinear model of the pure growth cycle. Journal of Economic Behavior & Organization 22(2), 133–151.
Kiss IZ and Gaspar V (2000). Controlling chaos with artificial neural network: Numerical studies and experiments. The Journal of Physical Chemistry A 104(34), 8033–8037.
Larsen ER, Morecroft JDW and Thomsen JS (1999) Complex behavior in a production–distribution model. European Journal of Operational Research 119(1), 61–74.
Lee HL, Padmanabhan V and Whang SJ (1997). The bullwhip effect in supply chains. Sloan Management Review 38(3), 93–102.
Li X, Xu W and Li V (2009). Chaos synchronization of the energy resourse system. Chaos, Solitons & Fractals 40(2), 642–652.
Marra M, Ho W and Edwards JS (2012). Supply chain knowledge management: A literature review R. Expert Systems with Applications 39(5), 6103–6110.
Matsumoto A (2001). Can inventory chaos be welfare improving. International Journal of Production Economics 71(1–3), 31–43.
Mosekilde E and Larsen ER (1988). Deterministic chaos in the beer production-distribution system. System Dynamics Review 4(1), 131–147.
Nesterov Y and Nemirovski A (1994). Interior Point Polynomial Methods in Convex Programming: Theory and Applications. SIAM: PA, Philadelphia.
Ott E, Grebogi C and Yorke J (1990). Controlling chaos. Physical Review Letters 64(11), 1196–1199.
Ouyang Y and Daganzo CF (2006a). Characterization of the bullwhip effect in linear, time-invariant supply chains: some formulae and tests. Management Science 52(10), 1544–1556.
Ouyang Y and Daganzo CF (2006b). Counteracting the bullwhip effect with decentralized negotiations and advance demand information. Physica A 363(1), 14–23.
Ouyang Y and Li X (2010). The bullwhip effect in supply chain networks. European Journal of Operational Research 201(3), 799–810.
Petersen IR (1987). A stabilization algorithm for a class of uncertain linear systems. Systems & Control Letters 8(4), 351–357.
Pyragas K (1992). Continuous control of chaos by self-controlling feedback. Physics Letters A 170(6), 421–428.
Qiang Q, Ke K, Anderson T and Dong J (2013). The closed-loop supply chain network with competition, distribution channel investment, and uncertainties. Omega 41(2), 186–194.
Salarieh H and Alasty A (2008). Delayed feedback control via minimum entropy strategy in an economic model. Physica A 387(4), 851–860.
Salarieh H and Alasty A (2009). Chaos control in an economic model via minimum entropy strategy. Chaos, Solitons & Fractals 40(2), 839–847.
Salcedo CAG, Hernandez AI, Vilanova R and Cuartas JH (2013). Inventory control of supply chain: Mitigating the bullwhip effect by centralized and decentralized internal model control approach. European Journal of Operational Research 224(2), 261–272.
Song Q and Wang Z (2007). A delay-dependent LMI approach to dynamics analysis of discrete-time recurrent neural networks with time-varying delays. Physica Letter A 368(1–2), 134–145.
Sosnotseva O and Mosekilde E (1997). Torus destruction and chaos–chaos intermittency in a commodity distribution chain. International Journal of Bifurcation and Chaos 7(6), 1225–1242.
Sprott JC (2003). Chaos and Time-Series Analysis. Oxford University Press: Oxford.
Sterman JD (1989). Modeling managerial behavior: Misperceptions of feedback in a dynamic decision making experiment. Management Science 35(3), 321–339.
Tarokh MJ, Dabiri N, Shokouhi AH and Shafiei H (2011). The effect of supply network configuration on occurring chaotic behavior in the retailer’s inventory. Journal of Industrial Engineering International 7(14), 19–28.
Thomsen JS, Mosekilde E and Sterman JD (1992). Hyper chaotic phenomena in dynamic decision making. Systems Analysis Modelling Simulation 9(2), 137–156.
Wang XF and Chen GR (2000). Chaotification via arbitrarily small feedback control: Theory, method, and applications. International Journal of Bifurcation and Chaos 10(3), 549–570.
Wang Z (2010). Chaos synchronization of an energy resource system based on linear control. Nonlinear Analysis: Real World Applications 11(5), 3336–3343.
Wang Z, Ho DWC, Liu Y and Liu X (2009). Robust H∞ control for a class of nonlinear discrete time-delay stochastic systems with missing measurements. Automatica 45(3), 684–691.
Wiggins S (1990). Introduction to Applied Nonlinear Dynamical Systems. Springer: NewYork.
Williams GP (1997). Chaos Theory Tamed. Taylor & Francis: Landon.
Wu Y and Zhang DZ (2007). Demand fluctuation and chaotic behavior by interaction between customers and suppliers. International Journal of Production Economics 107(1), 250–259.
Wu YR, Huatuco LH, Frizelle G and Smart J (2013). A method for analyzing operational complexity in supply chains. Journal of the Operational Research Society 64(5), 654–667.
Yu Y (2008). Adaptive synchronization of a unified chaotic system. Chaos, Solitons & Fractals 36(2), 329–333.
Zhang B, Xu S and Zou Y (2008). Improved delay-dependent exponential stability criteria for discrete-time recurrent neural networks with time-varying delays. Neurocomputing 72(1), 321–330.
Zhao X, Li Z and Li S (2011). Synchronization of a chaotic finance system. Applied Mathematics and Computation 217(13), 6031–6039.
Zhengguang W, Hongye S, Jian C and Wuneng Z (2009). New results on robust exponential stability for discrete recurrent neural networks with time-varying delays. Neurocomputing 72(13–15), 3337–3342.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Proof of Theorem 1
Consider the following Lyapunov–Krasovskii functional candidate for the system (22):
where
Define ΔV(t) = V(t + 1) − V(t). Then, along the solution of system (20), it is obtained
where
Substituting (46)–(50) into (45) leads to
where
From (23) and (24), it follows that
which are equivalent to
where e i is the unit column vector having one element on its ith row and zeros elsewhere.
Letting D = diag{d 1, d 2, …, d n } ≻ 0 and H = diag{h 1, h 2, …, h n } ≻ 0, it follows from (51), (54), and (55) that
where
with Π 1, Π 2, and Π 3 defined in (33), (34), and (35). According to the research of Zhengguang et al (2009), Ξ is equivalent to Ξ 2, and we have
It is clear from Ξ ≺ 0 that there exists a small scalar ɛ 0 ≻ 0 such that
From (57) and (58), it follows that
Therefore, the Lyapunov stability for the supply chain network (20) is achieved.
The exponential stability analysis of the network (20) is almost similar to the researches of Song and Wang (2007), Zhang et al (2008), Wang et al (2009) that is omitted to save pages. This completes the proof.
Appendix 2: Proof of Theorem 2
Construct the same Lyapunov–Krasovskii functional candidate V(t) as in Theorem 1. According to (36) and (37), a similar calculation as in Theorem 1 leads to
where
It can be written as
By Lemma 1, (61) holds for any F(t) satisfying (37) if and only if there exists a scalar ɛ ≻ 0 such that
By applying Schur complement (Zhengguang et al, 2009), (62) is equivalent to (38). Exponential stability analysis is exactly the same as Theorem 1.
Rights and permissions
About this article

Cite this article
Norouzi Nav, H., Jahed Motlagh, M.R. & Makui, A. Robust controlling of chaotic behavior in supply chain networks. J Oper Res Soc 68, 711–724 (2017). https://doi.org/10.1057/s41274-016-0112-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1057/s41274-016-0112-4