
Abstract
In this work, the influence of a gyrostatic moment vector (GMV) and the Newtonian field (NF) on the rotatory motion of a restricted rigid body (RB) according to disc case around a fixed point is examined. The basic equation of the body motion is used to get the regulating motion’s system as well as the three available independent first integrals. The system’s six equations and these integrals were reduced to two equations of a quasi-linear two-degrees-of-freedom autonomous system and one first integral. The disc has been presumed to be quickly rotating around one of the ellipsoid of inertia's main axis. Poincaré’s method of small parameter (PMSP) is applied to acquire the periodic solutions of the controlling system of the body’s motion. Euler's angles are utilized to characterize the body’s configuration at any instant in which it is graphed, as well as the obtained solutions to explore the good action of the body’s parameters on its motion. The phase plane graphs of these solutions are presented to examine their stabilities. The relevance of this work may be traced to its wide range of applications in fields as diverse as physics, engineering, and life sciences, including assembly and machine design.
Similar content being viewed by others


Introduction
The rotational motion of a RB problem around a fixed point in different fields such as gravitational, Newtonian, and electromagnetic fields is regarded as one of the most difficult mathematical problems in mechanics. The difficulty of this problem is due to the fact that it is controlled by a system of six nonlinear differential equations and three first integrals1. The exact solutions of these equations demand another adoption fourth first integral. With the exception of a few particular circumstances including Euler–Poinsot, Lagrange–Poisson, and Kovalevskaya, numerous trials have been carried out to find this integral in its entire generality2. A large number of integrable cases for the RB’s motion were obtained in3,4,5.
Since, it is difficult or even nearly impossible, until now, to get the general solutions of this problem because the fourth prime integral is not achieved in its general form. It may require looking at the perturbation methods6,7 to gain the approximate solutions of this problem.
The nonlinear vibrational motion of the RB in a plane is examined in several scientific works, e. g.8,9,10. In8, the authors considered the case of a fixed pivot point and three cases of resonance were examined simultaneously in the context of the approach of multiple scales7. The cases of moving suspension point of the damped RB pendulum with three-degrees-of-freedom (DOF) were investigated in9,10. The AMS was applied to obtain the analytic solutions of the controlling systems and the stability regions were determined and analyzed.
The averaging method7,11 has a wide spread in many scientific works to address the rotational motion of the RB problem, whether in the symmetric gravitational field12,13 or the NF14,15 or even in the presence of a gyrostatic moment and a magnetic field16,17,18. These works were explored when the applied operating perturbing moments along the primary axes of inertia are assumed to be constants. A tiny parameter is inserted into the regulating systems using some of the initial circumstances to gain the corresponding averaging system. The latter system is developed and numerically solved for a scenario analogous to Lagrange's gyroscope in19, in which the applied moments are expressed in terms of the angular velocity projections on the main axes. The case of the variation of these moments with time was examined in20. In21, the author provided another generalization of this problem when the body is acted by external moments and forces. Further details on how AM can be used to solve the RB problems can be found in11.
The PMSP was used in22,23 to acquire the solutions of the controlling system of the RB’s motion in a constant gravitational field. When the influence of NF and the GMV are taken into consideration as in24,25,26,27, a generalisation of this problem is provided. It is noted that the obtained solutions in22,23,24 have points of singularity, while the achieved ones in25,26,27 don’t have any singularities at all. These singularities appear when the natural frequency of the controlling system of motion matches with the integer values or its multiple inverses. In addition, when the body’s center of mass is shifted a little away from the body’s axis of dynamics symmetry, the same method was used in28 to gain the solutions of the regulating equations of motion (EOM) for a symmetric RB when the gravitational field is acted. This problem is highlighted in29 when the projections of the GMV on the body's main axes are considered. More investigation of this problem can be found in30,31,32 when the RB’s motion was influenced by the NF, GMV, and electromagnetic field, respectively. The influenced spinning motion of a RB by NF was examined in33 as a special case of a disc, in which the gained solutions have singular points. These singularities have been separately treated according to the values of the body’s natural frequency in23,34. The impact of one component of the GMV on the disc’s motion is investigated in35. The importance of this component lies in the fact that the solutions that have been reached do not contain any singular points. It has contributed to achieve a new frequency called the Amer’s frequency26,27,36, which in turn showed that there are no singularities in the solutions of RB’s motion at all.
The influence of the GMV and NF on the rotatory motion of a RB analogous to the disc case is investigated in this paper. The EOM are obtained using the basic equation of body motion and the three possible independent first integrals are gained. These equations, as well as the integrals, are condensed into just two quasi-linear 2DOF autonomous system and one first integral. The disc is supposed to be rapidly rotating around one of the main axes of the ellipsoid of inertia. In light of this system, the periodic solutions of the EOM are obtained using the PMSP, in which they don’t have any singularities at any value of the disc’s frequency. Euler's angles are employed to describe the body's current configuration and they are graphed as well as the computed solutions to reveal the positive effect of the body's parameters on its motion. The phase plane of the acquired solutions are plotted to assess their stability. The rest of the paper is organized as follows: “Problem’s formulation” is devoted to describe in detail the examined problem and to formulate the EOM besides the corresponding first integrals. In “Reduction of the controlling system”, the governing EOM and their integrals are reduced of a system of two quasi-linear differential equations and one integral. “Constructing the periodic solutions” presents the desired periodic solutions applying the PMSP for a positive value of the system’s frequency. Euler’s angles are examined in “Dynamical analysis of the body’s motion” to determine the orientation of the RB at any instant. The graphical depictions of the obtained outcomes are examined and discussed in “Outcomes analysis”. A conclusion of the achieved results is given at the end of this work.
Problem’s formulation
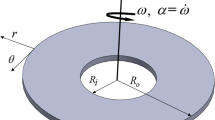
Let us consider a disc of mass and fixed point \(M\) and \(O\), respectively. Two frames of Cartesian coordinates are considered, in which they have the same origin \(O\); the first is fixed frame in space \(XYZ\), and the other is attached to the disc and moving with it. The disc’s motion is influenced by the NF which is developed from an attraction center \(O_{1}\) at a distance \(R = OO_{1}\) and the GMV \(\underline{\ell }\) whose projections \(\ell_{j} \,(j = 1,2,3)\) are directed along the principal axes \(x,y,z\) of ellipsoid of inertia, see (Fig. 1). To proceed with the problem’s description, we suppose that the body revolves with a high angular velocity \(r_{0}\) around the \(z\)-axis, which generates an angle \(\theta_{0} \approx \pi /2\). As a result, the equations of Euler-Poisson that characterise the body’s motion can be deduced from the fundamental angular momentum's equation \(\underline{{\dot{h}}}_{o} + \underline{\omega } \wedge \underline{{h_{0} }} = \underline{G}_{o}\) and the directional cosine equations1; where \(\underline{{\dot{h}}}_{o}\) denotes the variation of the angular momentum vector \(\underline{h}_{o} = (Ap + \ell_{1} ,Bq + \ell_{2} ,Cr + \ell_{3} )\) regarding time at \(O\), \(\underline{G}_{o}\) represents the instantaneous moment vector of the external forces regarding to the same place, \((p,q,r)\) are the components of the vector of angular velocity \(\underline{\omega }\) on the main axes of inertia ellipsoid, and \((A,B,C)\) are the values of these axes. Therefore, the basic dynamic equations for the RB have the form37
where \((x_{0},y_{0},0)\) represent the center of mass’s coordinates in the rotating frame, \((\gamma,\gamma{^{\prime}},\gamma^{\prime \prime})\) are the projections of the unite vector \(\underline{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{K} }}\) that located along Z-axis, \(g\) is the acceleration due to gravity, and \(\lambda\) is the attracting center coefficient.

The force component.
It's essential to mention that system of Eq. (1) has the below integrals of energy, area, and the geometric integral
where \((p_{0},q_{0},r_{0} )\) and \((\gamma_{0},\gamma^{\prime}_{0},\gamma^{\prime \prime}_{{0}})\) denote the values of \((p,q,r)\) and \((\gamma,\gamma{^{\prime}},\gamma^{\prime \prime})\) at \(t = 0\), respectively.
We will now examine the disc’s case, i.e. (\(A + B = C\)) and consider the below variables and parameters
where \(0 < \varepsilon < < 1\) refers to a small parameter.
Based on the foregoing, the controlling system (1) and its integrals (2) have the following forms:
where
Reduction of the controlling system
This section's goal is to reduce system (5) and integrals (6) into a more manageable system comprised of two second-order differential equations and a single integral. To fulfil this goal, one may represent the variables \(r_{1}\) and \(\gamma{^{{\prime\prime}}_{1}}\) through the below forms using the early two equations of (5).
Differentiate the first equation of system (4) to get
Substituting \(\dot{r}_{1},\dot{\gamma{^{\prime}}}_{1},\dot{q}_{1},\) and \(\dot{\gamma^{\prime \prime}}_{1}\) from (4) into the previous equation to obtain
The substitution from (5) to (7) of \(r_{1}^{2} ,r_{1} \gamma{^{{\prime\prime}}_{1}} ,\gamma^{{\prime \prime 2}} ,\) and \(\gamma{^{{\prime\prime}}_{1}}\) into the above equation yields the following first equation in the required system
In the same manner, one can derivative the fourth equation of system (4) and by using the other equations of the same system in addition to the substitution from (5)–(7) to obtain the following second equation of the desired system
where \(\omega^{{\prime 2}} = 1 + \left( {\ell_{3} /Abr_{0} } \right)\) is known by Amer’s frequency26,27,36 which differs from the frequency \(\omega\) by a samll amount depending on \(\ell_{3}\).
Taking into account how \(r_{0}\) is considered high. As a result, \(r_{0}^{-2},r_{0}^{-3}, \ldots\) can be disregarded. The variables \(q_{1}\) and \(\gamma^{\prime}_{1}\) can be obtained from the system of Eqs. (4) and (7). They have the forms
New parameters \(p_{2}\) and \(\gamma_{2}\) can be introduced in such a way
where
According to the new terms variables \(p_{2}\) and \(\gamma_{2}\), the variables \(q_{1}\) and \(\gamma^{\prime}_{1}\) can be estimated as follows
where
Substituting (11) and (12) into (6), to obtain the next formulas of \(S_{1}\) and \(S_{2}\) based on the power series of \(\varepsilon\)
where
Inserting (13) and (14) into (7) to obtain
Utilizing (8) and (9), as well as (11)–(15), we are able to immediately produce the necessary system.
where
The integral of system (16) can be gained by using (5) as follows
Our goal is to determine whether this system has periodic solutions under the conditions \(A > B > C\) or \(A < B < C\) (\(\omega^{{\prime 2}}\) is positive). In the first scenario, the body is placed in a quick starting spin \(r_{0}\) around the major inertia ellipsoid axis, while in the second scenario; the body is positioned in a quick beginning spin \(r_{0}\) around the minor inertia ellipsoid axis.
Constructing the periodic solutions
This section's main objective is to find the periodic solutions of (16), taking into account the positive sign of \(\omega^{{\prime 2}}\). It is obvious that the following conditions have no impact on the generality of the solutions \(p,q,r,\gamma ,\gamma{^{\prime}},\) and \(\gamma^{\prime \prime}\) due to the autonomously of system (16)
The generating system of (16) has the form
This system allows us the following periodic solutions with period \(T_{0} = 2\pi \,n\)
where \(M_{j} \;\;(j =1,2,3)\) indicate unknown constants can be determined later. In light of the foregoing, we can assume, the general desired periodic solutions of the autonomous system (16) has the form
where \(T(\varepsilon )\) refers to the periodicity of the solutions. It's crucial to highlight that the constants \(\beta_{1}\), \(\omega{^{\prime}}\beta_{2}\) and \(\beta_{3}\) reflect the differences between the initial values of \(p_{2},\dot{p}_{2}\) and \(\gamma_{2}\) of system (16) from their starting values of the system (20); these differences diminish when \(\varepsilon = 0\). Through the following relations, one can provide the relevant conditions of these solutions (22) at \(t = 0\).
The following operator defines the functions \(G_{k} (\tau )\) and \(H_{k} (\tau )\;\;(k = 1,2,3, \cdots)\) in the context of38
where the expressions of the functions \(g_{k} (\tau )\) and \(h_{k} (\tau )\) can be defined mathematically as follows
We are now looking for the determination of the functions \(F_{1}^{(0)} ,\Phi_{1}^{(0)} ,F_{2}^{(0)} ,\) and \(\Phi_{2}^{(0)}\). Therefore, solutions (21) must be reformulated in the following forms
The substitution of (26) into (14) produces
Making use of (26) and (27) into (17) to acquire the desired expressions of the functions \(F_{1}^{(0)} ,\Phi_{1}^{(0)} ,F_{2}^{(0)} ,\) and \(\Phi_{2}^{(0)}\) as follows
where
Based on the formulas (25), (28) and (29), we can obtain directly the following expressions of \(g_{1} (T_{0} ),g_{2} (T_{0} ),h_{1} (T_{0} ),h_{2} (T_{0} ),\) and their first derivatives
The substitution of the conditions (23) into integral (18) at \(\tau = 0\), produces
If \(\gamma{^{{\prime\prime}}_{0}}\) does not dependent on \(\varepsilon ,\) we can acquire \(M_{3}\) and \(\beta_{3}\) as follows
The following provide the independent periodicity requirements can be expressed as follows 22
The expressions of \(L_{1} (\omega{^{\prime}})\) and \(N_{1} (\omega{^{\prime}})\) can be formulated according to (32) by inserting \(\beta_{{ 1}} ,\beta_{{ 2}} ,\) and \(M_{3} + \beta_{{ 3}}\) instead of \(M_{1} ,M_{2} ,\) and \(M_{3}\), respectively. As a result, we may write
where
Since the z-axis must be oriented along either the minor or major axis of the body's inertia ellipsoid, then \(W_{1} (\omega{^{\prime}}) > 0\) holds true for all \(\omega{^{\prime}}\) that has been taken into account. Therefore, it is hypothesized that
According to (32), each of \(\beta_{{ 1}}\) and \(\beta_{{ 2}}\) can be calculated as a power series of \(\varepsilon\), in which they started with an order of \(\varepsilon^{3}\). Therefore, the desired periodic solutions and the correction of the period \(\alpha (\varepsilon )\) can be written as follows
It is significant to note that the obtained solutions (40) do not involve any singular points owing to the usage of Amer’s frequency, unlike earlier works such as22,23,24 when \(\omega\) equals \(= 1,2,3, \cdots\) or their multiple inverses. The gained solutions are applicable for all rational values of \(\omega{^{\prime}}\) and are considered generalizations of33 and35.
Dynamical analysis of the body’s motion
This section's objective is to use Euler's angles (the angle nutation \(\theta\), the angle of precession \(\psi\), and the angle of spin \(\varphi\)) to visualize and analyse the disc's motion at any specific time. These angles are regarded as one of the most significant ways to depict how motion is oriented. The periodic solutions (34) nevertheless hold true if \(t\) is changed to \(t + t_{0}\), where \(t_{0}\) is any arbitrary amount of time, because the initial system remains autonomous. Euler's angles have the following representations in terms of time \(t\)1
Making use of (34) and (35), where \(t + t_{0}\) is inserted instead of \(t\), and then utilizing (4) to obtain the next formulas of \(\theta ,\psi ,\) and \(\varphi\)
where
where \(\theta_{0} ,\psi_{0} ,\varphi_{0} ,\) and \(r_{0}\) are arbitrary constants (\(r_{0}\) is large). If they are chosen, it is possible to analyse the disc’s motion according to the obtained solutions (34). To be more specific, we note from the conditions \(\gamma_{0} > 0,\quad 0 < \gamma{^{{\prime\prime}}_{0}} < 1\) that \(\psi > 0\). Therefore speed of precession constant does not equal zero. Moreover, the comparison between the expressions (36) of Euler’s angles and the obtained ones in22 and38 shows consistency between them when the GMV vanishes, besides the absence of the Newtonian force field.
Outcomes analysis
This section focuses on discussing the gained solutions (34) and the corresponding Euler’s angels (36) in light of their graphs. Therefore, let's have a look at the below data that affects body motion.
Figures 2, 3, and 4 show the influence of the projections of the GMV \(\ell_{1} ,\ell_{2} ,\) and \(\ell_{3}\) on the behaviour of the acquired solutions (34), respectively. These figures are drawn in matching of the above data. As expected before, the graphed solutions have periodic manner. The component \(\ell_{1}\) had an excellent effect on the solutions \(p_{1}\) and \(\gamma_{1}^{\prime}\) as drawn in portions (a) and (e) of Fig. 2, while this impact becomes slightly with the other solutions as graphed in the other parts of Fig. 2. The reason is due to the mathematical structures of the achieved solutions (34). It is important to notice that the drawn waves in Fig. 2a and e are standing with some nodes, in which their amplitudes increase with the increase of \(\ell_{1}\) values.

Represents the influence of \(\ell_{1}\) on the solutions \(p_{1} ,q_{1} ,r_{1} ,\gamma_{1} ,\gamma^{\prime}_{1},\) and \(\gamma{^{{\prime\prime}}_{1}}\).

Describes the impact of \(\ell_{2}\) on the solutions \(p_{1} ,q_{1} ,r_{1} ,\gamma_{1} ,\gamma^{\prime}_{1} ,\) and \(\gamma{^{{\prime\prime}}_{1}}\).

Shows the effects of \(\ell_{3}\) on the gained solutions (34).
Looking more closely at the portions of Fig. 3 reveals that \(\ell_{2}\) has a significant impact on the \(p_{1} ,q_{1} ,\gamma^{\prime}_{1} ,\) and \(\gamma{^{{\prime\prime}}_{1}}\) while this action can be neglected with the solutions \(r_{1}\) and \(\gamma_{1}\). The amplitudes of the periodic waves decrease with the increase of \(\ell_{2}\) values as seen in Fig. 3a and b, in contrast we find that the amplitudes of the waves increase with an increment of \(\ell_{2}\) values, as graphed in Fig. 3e and f. Additionally, one may also notice that the number of oscillations remains stationary.
One of the significant aspects is to study the influence of \(\ell_{3}\) on the solutions \(p_{1} ,q_{1} ,r_{1} ,\gamma_{1} ,\gamma^{\prime}_{1} ,\) and \(\gamma{^{{\prime\prime}}_{1}}\). Therefore, curves of Fig. 4 are plotted to reveal its good action on the periodic behaviours of these solutions. The good effect of this component is evident with solutions \(p_{1} ,q_{1} ,\gamma^{\prime}_{1} ,\) and \(\gamma{^{{\prime\prime}}_{1}}\) as seen in Fig. 4a, b, e and f, while there is no significant effect with solutions \(r_{1}\) and \(\gamma_{1}\) as plotted in Fig. 4c and d.
The phase plane diagrams of the solutions \(p_{1} ,q_{1} ,r_{1} ,\gamma_{1} ,\gamma^{\prime}_{1} ,\) and \(\gamma{^{{\prime\prime}}_{1}}\) are drawn in parts of Figs. 5, 6, and 7 for various values of \(\ell_{1} ,\ell_{2} ,\) and \(\ell_{3}\), respectively. These figures are created in the planes \(p_{1} \dot{p}_{1} ,q_{1} \dot{q}_{1} ,r_{1} \dot{r}_{1} ,\) \(\gamma_{1} \dot{\gamma }_{1} ,\gamma^{\prime}_{1} \dot{\gamma^{\prime}}_{1},\) and \(\gamma{^{{\prime\prime}}_{1}} \dot{\gamma^{\prime \prime}}_{1}\). According to the periodicity of the solutions, the symmetric curves of these figures are closed, which denote the stability of the gained solutions. According to the variations of the solutions with the \(\ell_{j}\) values, there is a change in the closed curves’ number, i.e., each periodic wave has only one corresponding closed curve.

Reveals the phase plane plots of attained solutions at \(\ell_{1} ( = 50,100,150)\;{\text{kg}}\;{\text{m}}^{2} \;{\text{s}}^{ - 1}\).

Shows the phase plane plots of attained solutions at \(\ell_{2} ( = 50,100,150)\;{\text{kg}}\;{\text{m}}^{2} \;{\text{s}}^{ - 1}\).

Explores the phase plane plots of attained solutions at \(\ell_{3} (= 50,100,150)\;{\text{kg}}\;{\text{m}}^{2} \;{\text{s}}^{ - 1}\).
Curves of Figs. 8, 9, and 10 characterize the variations of the angles \(\theta ,\psi ,\) and \(\varphi\) when \(\ell_{j} (= 50,100,150);\,\,\,j = 1,2,3\). Examining these figures reveals that the angle \(\theta\) has the periodicity forms with the change of \(\ell_{j}\) as explored in parts (a) of Figs. 8, 9, and 10 i.e., it varies between increasing and decreasing, which is predicted from the \(\theta\) equation of the system (36). Based on the curves of parts (b) and (c) of these figures, one can conclude that the time history of the angles \(\psi\) and \(\varphi\) increases and decreases with time, respectively. The reason is owing to the mathematical formulations of these angels as indicated in the system of Eqs. (36).

Describes the behaviour of the Euler’s angles at \(\ell_{1} (= 50,100,150)\;{\text{kg}}\;{\text{m}}^{2} \;{\text{s}}^{ - 1}\).

Describes the behaviour of the Euler’s angles at \(\ell_{2} (= 50,100,150)\;{\text{kg}}\;{\text{m}}^{2} \;{\text{s}}^{ - 1}\).

Describes the behaviour of the Euler’s angles at \(\ell_{3} (= 50,100,150)\;{\text{kg}}\;{\text{m}}^{2} \;{\text{s}}^{-1}\).
Conclusion
The rotatory motion of a disc subjected to the NF and the GMV has been investigated. The controlling motion’s system in addition to their integrals, have been derived using the fundamental equation of angular momentum. In light of the PMSP, this system has been reduced to a quasi-linear autonomous one, besides only one integral, and then the approximate solutions and the Euler’s angles have been achieved. Along with the lack of the Newtonian force field, the comparison of the gained solutions and Euler's angles with the found ones of these works, which reveals consistency between them when the GMV vanishes. Singularities that typically show up in the solutions of previous treatments have been avoided by using the alternative frequency \(\omega{^{\prime}}\) in place of \(\omega\). In order to define how the body is oriented at any given time, Euler's angles as well as the obtained solutions are drawn to reveal the impact of the GMV on the disc’s motion. The solutions' stabilities have been assessed in accordance with the phase plane graphs of the solutions. The significance of this study may be traced to its wide range of applications in fields like physics, astronomy, and engineering dynamics applications, including assembly and machine design.
Data availability
The datasets used and/or analysed during the current study are available from the corresponding author on reasonable request.
References
Leimanis, E. The General Problem of the Motion of Coupled Rigid Bodies About a Fixed Point (Springer, 1965).
Amer, T. S. & Amer, W. S. The substantial condition for the fourth first integral of the rigid body problem. Math. Mech. Solids 23(8), 1237–1246 (2018).
Yehia, H. M. New integrable cases in the dynamics of rigid bodies. Mech. Res. Commun. 13, 169–172 (1986).
Yehia, H. M. New solvable problems in the dynamics of a rigid body about a fixed point in a potential field. Mech. Res. Commun. 57, 44–48 (2014).
Elmandouh, A. A. New integrable problems in a rigid body dynamics with cubic integral in velocities. Results Phys. 8, 559–568 (2018).
Malkin, I. G. Some Problems in the Theory of Nonlinear Oscillations (AEC-tr-3766) (U.S. Atomic Energy Commission Technical Information Service, 1959).
Nayfeh, A. H. Perturbations Methods (Wiley, 2004).
Awrejcewicz, J., Starosta, R. & Kaminska, G. Asymptotic analysis of resonances in nonlinear vibrations of the 3-dof pendulum. Differ. Equ. Dyn. Syst. 21, 123–140 (2013).
Amer, T. S., Bek, M. A. & Abouhmr, M. K. On the vibrational analysis for the motion of a harmonically damped rigid body pendulum. Nonlinear Dyn. 91, 2485–2502 (2018).
Abady, I. M., Amer, T. S., Gad, H. M. & Bek, M. A. The asymptotic analysis and stability of 3DOF non-linear damped rigid body pendulum near resonance. Ain Shams Eng. J. 13(2), 101554 (2022).
Chernousko, F. L., Akulenko, L. D. & Leshchenko, D. D. Evolution of Motions of a Rigid Body About its Center of Mass (Springer, 2017).
Akulenko, L. D., Leshchenko, D. D. & Chernousko, F. L. Perturbed motions of a rigid body that are close to regular precession. Izv. Akad. Nauk SSSR. MTT 21(5), 3–10 (1986).
Akulenko, L. D., Leshchenko, D. D. & Kozochenko, T. A. Evolution of rotations of a rigid body under the action of restoring and control moments. J. Comput. Syst. Sci. 41(5), 868–874 (2002).
Amer, T. S. & Abady, I. M. On the motion of a gyro in the presence of a Newtonian force field and applied moments. Math. Mech. Solids 23(9), 1263–1273 (2018).
Ismail, A. I., Amer, T. S. & El Banna, S. A. Electromagnetic gyroscopic motion. J. Appl. Math. 2012, 1–14 (2012).
Amer, T. S. On the rotational motion of a gyrostat about a fixed point with mass distribution. Nonlinear Dyn. 54, 189–198 (2008).
Amer, T. S. The rotational motion of the electromagnetic symmetric rigid body. Appl. Math. Inf. Sci. 10(4), 1453–1464 (2016).
El-Sabaa, F. M., Amer, T. S., Sallam, A. A. & Abady, I. M. Modeling and analysis of the nonlinear rotatory motion of an electromagnetic gyrostat. Alex. Eng. J. 61(2), 1625–1641 (2022).
Akulenko, L. D., Leshchenko, D. D. & Chernousko, F. L. Perturbed motions of a rigid body, close to the Lagrange case. J. Appl. Math. Mech. 43(5), 829–837 (1979).
Akulenko, L. D., Zinkevich, Y. A. S., Kozachenko, T. A. & Leshchenko, D. D. The evolution of the motions of a rigid body close to the Lagrange case under the action of an unsteady torque. J. Appl. Math. Mech. 81(2), 79–84 (2017).
Amer, W. S. The dynamical motion of a gyroscope subjected to applied moments. Results Phys. 12, 1429–1435 (2019).
Arkhangel’skii, Iu. A. On the motion about a fixed point of a fast spinning heavy solid. J. Appl. Math. Mech. 27(5), 1314–1333 (1963).
Ismail, A. I. The motion of fast spinning rigid body about a fixed point with definite natural frequency. Aerosp. Sci. Technol. 3, 183–190 (1997).
El-Barki, F. & Ismail, A. I. Limiting case for the motion of a rigid body about a fixed point in the Newtonian force field. ZAMM 75(11), 821–829 (1995).
Ismail, A. I. & Amer, T. S. The fast spinning motion of a rigid body in the presence of a gyrostatic momentum. Acta. Mech. 154, 31–46 (2002).
Amer, T. S. Motion of a rigid body analogous to the case of Euler and Poinsot. Analysis 24, 305–315 (2004).
Amer, T. S. & Amer, W. S. The rotational motion of a symmetric rigid body similar to Kovalevskaya’s case. Iran. J. Sci. Technol. Trans. Sci. 42(3), 1427–1438 (2018).
Elfimov, V. S. Existence of periodic solutions of equations of motion of a solid body similar to the Lagrange gyroscope. J. Appl. Math. Mech. 42(2), 251–258 (1978).
Amer, T. S. On the motion of a gyrostat similar to Lagrange’s gyroscope under the influence of a gyrostatic moment vector. Nonlinear Dyn. 54, 249–262 (2008).
Amer, T. S. On the dynamical motion of a gyro in the presence of external forces. Adv. Mech. Eng. 9(2), 1–13 (2017).
Amer, T. S., Galal, A. A., Abady, I. M. & El-Kafly, H. F. The dynamical motion of a gyrostat for the irrational frequency case. Appl. Math. Model. 89, 1235–1267 (2021).
Farag, A. M., Amer, T. S. & Amer, W. S. The periodic solutions of a symmetric charged gyrostat for a slightly relocated center of mass. Alex. Eng. J. 61, 7155–7170 (2022).
Ismail, A. I. The motion of a fast spinning disc which comes out from the limiting case. Comput. Methods Appl. Mech. Engrg. 161, 67–76 (1998).
Ismail, A. I. Treating a singular case for a motion a rigid body in a Newtonian field of force. Arch. Mech. 49(6), 1091–1101 (1997).
Bek, M. A., Amer, T. S. & Gamiel, Y. On the spinning motion of a disc under the influence a gyrostatic moment. In Perspectives in Dynamical Systems III: Control and Stability. DSTA 2019. Springer Proceedings in Mathematics & Statistics Vol. 364 (ed. Awrejcewicz, J.) 1–14 (Springer, 2021). https://doi.org/10.1007/978-3-030-77314-4_1.
Amer, T. S. & Abady, I. M. On the application of KBM method for the 3-D motion of asymmetric rigid body. Nonlinear Dyn 89, 1591–1609 (2017).
Yehia, H. M. Rigid Body Dynamics: A Lagrangian Approach (Springer, 2022).
Arkhangelskii, I. A. Construction of Periodic Solutions for the Euler-Poisson Equations by Means of Power Series Expansion Containing a Small Parameter (Colloquia Mathematica Societatis Janos Bolyai, 1975).
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB).
Author information
Authors and Affiliations
Contributions
T.S.A.: resources, conceptualization, formal analysis, methodology, validation, reviewing and editing, visualization and reviewing. W.S.A.: methodology, investigation, conceptualization, data duration, validation, writing-original draft preparation. H.E.: investigation, methodology conceptualization, validation, data duration, writing-original draft preparation.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Amer, T.S., Amer, W.S. & El-Kafly, H. Studying the influence of external moment and force on a disc’s motion. Sci Rep 12, 16942 (2022). https://doi.org/10.1038/s41598-022-21199-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-022-21199-z
- Springer Nature Limited
This article is cited by
-
Analyzing the spatial motion of a rigid body subjected to constant body-fixed torques and gyrostatic moment
Scientific Reports (2024)
-
Simulation of a Subjected Rigid Body Motion to an External Force and Moment
Journal of Vibration Engineering & Technologies (2023)