
Abstract
Successful motor control requires accurate estimation of our body in space for planning, executing, and evaluating the outcome of our actions. It has been shown that the estimation of limb position is susceptible to motor adaptation. However, a similar effect has not been found in locomotion, possibly due to how it was tested. We hypothesized that split-belt walking with the legs moving at different speeds changes the estimation of the legs’ position when taking a step. Thus, we assessed young subjects’ perception of step length (i.e., inter-feet distance at foot landing) when they moved their legs (active perception) or when the legs were moved by the experimenter (passive perception). We found that the active perception of step length was substantially altered following split-belt walking, whereas passive perception exhibited minor changes. This suggests that split-belt walking induced the adaptation of efferent signals, without altering sensory signals. We also found that active perceptual shifts were sensitive to how they were tested: they were most salient in the trailing leg and at short step lengths. Our results suggest that split-belt walking could modulate the deficient perception of step length post-stroke, which may contribute to gait asymmetries impairing patients’ mobility.
Similar content being viewed by others

Introduction
An accurate estimation of the body in space is crucial for planning, executing, and adapting our actions. For example, motor commands to move our eyes are planned based on the fovea’s location relative to a visual target (e.g.1). Also, corrective actions are generated when the estimated hand position is veering off target location2,3 and motor adaptation occurs upon discrepancies between the estimated and actual limb position to improve performance in subsequent movements (e.g.4). It has been shown that the estimation of limb position is altered upon experiencing sustained movement disturbances, such as forces deviating our hand from its reaching goal5,6,7,8,9,10,11,12. This is indicated by a mismatch between the actual and perceived position of the limb, which subjects report after their limb is passively moved by the experimenter (i.e., passive perceptual after-effects) or actively moved by the subjects (i.e., active perceptual after-effects). Passive perceptual after-effects are thought to indicate the recalibration of sensory information following motor adaptation (e.g.4,5,6,9,13,14,15,16), whereas active perceptual after-effects support the idea that motor adaptation is governed by predicting and updating the sensory consequences from our actions5,6,7,8,9,10,11,12. Thus, motor adaptation can induce passive or active perceptual after-effects altering the motor system’s critical ability to estimate the position of our limbs in space.
Interestingly, people’s estimation of limb position appears to remain unchanged after motor adaptation in walking17, possibly due to how this has been tested18. It is clinically relevant to determine if this is the case since locomotor adaptation can change the movements of patients with brain lesions, such as stroke19,20. However, it is unknown the extent to which locomotor adaptation can also change their faulty estimations of limb position21. A recent study probing the perception of one leg position with respect to the body in young, intact subjects did not find passive or active perceptual after-effects despite robust motor after-effects17. This was unexpected given previous evidence suggesting that motor adaptation can recalibrate sensory signals4,5,6,9,13,14,15,16 and is governed by updating predicted sensory consequences5,6,7,8,9,10,11,12. However, there is also evidence that passive and active perceptual changes post-adaptation are sensitive to the condition in which they are evaluated22,23,24,25. For example, passive perceptual after-effects depend on the limb that is tested7, raising the possibility that clearer perceptual changes could be observed when probing both limbs contributing to each step length. Similarly, active perceptual after-effects might be regulated by test condition such as walking speed; given that this factor alters the magnitude of motor after-effects26, and hence the recalibration of internal models underlying active perception after-effects5,6,7,8,9,10,11,12. Thus, it is of clinical interest to determine the extent to which the estimation of limb position could be shifted following sensorimotor adaptation in locomotion.
In summary, we investigated the effects of sensorimotor adaptation on the estimation of limb position in walking. Our primary hypothesis is that sensorimotor adaptation alters the estimation of step length, which requires concurrent localization of each leg’s position. We further hypothesized that walking condition, such as walking speed and/or step size, would regulate the shifts in active perception of limb positions since walking speed alters motor after-effects26 and walking speed also alters step size (e.g.27,28). To test these hypotheses, we separately investigated shifts in passive and active perception of step length following sensorimotor adaptation in walking. Passive perception was assessed by externally moving subjects’ legs, whereas active perception was evaluated by instructing subjects to take steps of different lengths. Importantly, the active perception task was performed under distinct walking speeds and step sizes to test our hypothesis that active perceptual effects depend on the condition in which they are tested. We assessed both passive and active perception since it is possible that sensorimotor adaptation only induces changes in the integration of afferent and efferent information, but not in afferent information alone.
Results
Passive perception of step length was minimally adapted following split-belt walking
In this study we first asked does sensory information encoding limb position recalibrate after locomotor adaptation induced by split-belt walking? To address this question, we used a passive perceptual task, as in previous work (e.g.4,5,6,9,13,14,15,16), to quantify changes in the perceived position of the legs after they were passively moved to distinct step lengths (i.e., inter-feet distance). We found that the recalibration of sensory information was unlikely given that participants (n = 8, 2 females, 24.8 ± 4.8 yrs) exhibited very large motor after-effects in both step lengths (i.e., large asymmetric steps), whereas they reported very small changes in the passively perceived location of step lengths (i.e., passive perceptual after-effects). This was after all subjects experienced a split-belt adaptation paradigm known to induce sensorimotor recalibration (e.g.29). While we used distinct tasks to assess after-effects in the motor and perceptual domains, motor and passive perceptual after-effects were quantified in the same way. In both domains after-effects were computed as differences in step length (Fig. 1a,b) or step length asymmetry (Fig. 1c) before and after a long period of either regular walking (tied session) or split-belt walking (split session). After-effects were significantly different between the split and tied sessions in the motor domain (Fig. 1b: paired t-tests: slow leg’s step length: p < 0.001; fast leg’s step length: p < 0.001; Fig. 1c: step length asymmetry: p < 0.001). In contrast, we observed only miniscule passive perceptual after-effects for one leg during the split compared to the tied session. Specifically, we did not observe significant changes in subjects’ perception of the slow leg’s step length across testing sessions (Fig. 1a: one-way repeated measures ANOVA testing the effect of session; p = 0.98), but we found a significant session effect on the perception of fast leg’s step length (Fig. 1a: p = 0.035). This constituted a very small perceptual shift (0.8 ± 1.5 cm) compared to the significant motor after-effects in the fast leg’s step length (11.7 ± 5.9 cm) and the slow leg’s step length (−20.1 ± 6.7 cm). Thus, we observed a significant, but marginal adaptation effect on the perception of the fast leg’s step length. In sum, split-belt walking produced prominent motor after-effects and a minimal change in subjects’ estimation of step lengths based on sensory information alone.

Split-belt walking did not induce changes in passive perception of step lengths. (a,b) In all plots, step length is defined as the distance between the ankles at heel strike (i.e., when the foot hits the ground). Change in step length was computed as the difference in step length before and after the Adaptation epoch, which during the control session was an extended period of tied walking (light grey) and during the split session was an extended period of split walking (dark grey). These changes were expressed as a percentage of each subject’s mean step length during baseline walking at 1 m/s to account for different step sizes across individuals. Negative and positive values indicate that step lengths were either perceived shorter or longer, respectively, after the Adaptation epoch compared to before. (a) Passive Perception After-Effects: Bars’ height indicates group mean changes in perception after the Adaptation epoch relative to baseline behavior. Dots indicate values for each individual and error bars indicate standard errors. Passive perception was quantified by probing subjects’ perception of three step length sizes (short, comfortable, and long) imposed by passively moving subjects’ legs. Each participant’s weight was equally distributed between the legs when their step length perception was probed. (b) Motor After-Effects of individual legs: Bars’ height indicates group mean changes in step length after either the tied session or the split session. Standard errors and individual values (dots) are also displayed. (c) Motor After-Effects of step length asymmetry: Step length asymmetry is defined as the differences between step lengths of two consecutive steps normalized by the sum of these step lengths. Positive values indicate that steps taken with the dominant leg are longer compared to those taken with the non-dominant leg; and vice versa for negative values. Bar height indicates group mean changes in step length symmetry after the Adaptation epoch. Standard errors and individual values are also displayed.
Active perception of step length was modulated in both legs after split-belt walking
We also asked does split-belt walking update the predicted sensory consequences of people’s movement? We found that this was the case given that participants (n = 27, 16 females, 25.1 ± 5.4 yrs.) exhibited both motor and active perceptual after-effects. The latter were evaluated with an active perceptual task, as in existing literature (e.g.5,6,7,8,9,10,11,12), to quantify changes in the actively perceived position of the legs when subjects walked at different speeds (i.e., mid or slow) and with distinct step lengths (i.e., short or long). This variety of testing conditions was designed to also determine the effect of walking condition on active perceptual after-effects. Thus, we had a total of three groups labeled by the step length size that was tested first in the perceptual task and the speed at which it was tested (Long-MidSpeed, Short-MidSpeed, Short-SlowSpeed). Motor and active perceptual after-effects were quantified as differences in executed step lengths before and after the extended walking period of either regular walking (tied session) or split-belt walking (split-session). We specifically assessed whether subjects overshot or undershot target step lengths specified by the experimenter. Figure 2a shows that following split-belt walking, all groups undershot (negative values) or overshot (positive values) target step lengths with the leg that walked slow (slow leg) or fast (fast leg), respectively, during the split condition. This indicated that subjects perceived their step lengths to be either longer or shorter than actual when stepping with the slow or fast leg, respectively. Consistently, we found a significant effect of session on the active perception of the slow (p < 0.001) and fast step lengths (p < 0.001) with one-way repeated measures ANOVAs. These shifts in perception of individual leg’s step length led to significant differences in step length asymmetries during the active perceptual task across sessions (Fig. 2c: session effect: p < 0.001).

Split-belt walking induces changes in active perception. (a) Step Length Active Perception After-Effects: Bars’ height indicates group mean changes in step length before and after the Adaptation epoch, which consisted of tied (empty bars) or split walking (filled bars). These changes were expressed as a percentage of each subject’s mean step length during the baseline active perceptual task tested at the specific step length size and walking speed for each group. For example, we used the mean step lengths during the baseline perceptual task aiming at short step lengths and walking at slow speed for the Short-SlowSpeed group. Negative or positive values indicate that subjects either undershot or overshot the target step lengths, respectively because they perceived step lengths to be longer or shorter than the actual value. The insert illustrates the %Change in Step Length that was executed by the slow (red dot) and fast (blue dot) step lengths at steady state during split-belt walking (Late Adaptation; white background). We also show the target step lengths (red and blue dots) for probing active perception during baseline in the Short-MidSpeed group (red background) and the Long-MidSpeed group (blue background). Standard errors are displayed in all plots. (b) Step Length Motor After-Effects: Bars’ height indicates group mean changes in step length relative to baseline walking during the Catch trial tested at either 1.0 m/s (Short-MidSpeed and Long-MidSpeed) or 0.5 m/s (Short-SlowSpeed). The mid speed groups were pooled for this analysis since these two groups experienced exactly the same protocol prior to the catch trial. (c) Step Length Asymmetry Perceptual and Motor After-Effects: Bars’ height indicates group mean changes in step length asymmetry relative to baseline walking during the Perceptual trials and during the Catch trials. The left panel illustrates the mean step length asymmetry that results from the change in individual step lengths during the active perceptual task for each group. The right panel illustrates the mean step length asymmetry that results from changes during the Catch trial tested at the Mid (1.0 m/s) or Slow (0.5 m/s) walking speed. Standard errors are displayed in all plots.
Active perception of step length was modulated by step size, but not walking speed
We performed an analysis only on the split session to determine whether the different testing conditions (i.e., step size or walking speed) would have a distinct impact on the active perception of step length. We found that step length size, but not walking speed, had an effect on active perception after-effects. Specifically, a two-way repeated measures ANOVA indicated a significant interaction between leg and step length size (leg#step length size: p = 0.004) for the groups starting the perceptual task with different step lengths sizes, but the same walking speed (i.e., Short-MidSpeed vs. Long-MidSpeed). This interaction was driven by greater after-effects in the perception of the fast leg’s step length when taking short (Fig. 2a, red bar) compared to long (Fig. 2a, blue bar) step lengths (two sample t-test: p = 0.024). This might be due to greater similarities between training and testing in the short vs. long conditions. Namely, the executed step lengths during the training condition (i.e., split-belt walking, Late Adaptation in Fig. 2a insert, white background) were qualitatively more similar to the target step lengths in the Short-MidSpeeds group (Fig. 2a insert, red background) than in the Long-MidSpeeds group (Fig. 2a insert, blue background). Conversely, we did not find an interaction between leg and walking speed (leg#speed: p = 0.16) for the groups that walked at different speeds, but same step lengths in the active perceptual task (i.e., Short-MidSpeed vs. Short-SlowSpeed). This contrasted the effect of walking speed on motor after-effects (Fig. 2b). Specifically, the slow step length motor after-effects were larger when tested at slow than mid walking speeds (Fig. 2b: two sample t-test between pooled mid speed groups vs. a slow speed group; p = 0.008), whereas they were the same for fast step lengths (p = 0.83). Thus, the effect of speed on step length asymmetry (Fig. 2b: p = 0.001) was due to the slow step length after-effects. In summary, split-belt walking induces motor and active perceptual after-effects that are regulated by the way they are tested: motor after-effects are altered by walking speed, whereas perceptual after-effects are altered by step length size.
Active perception of step length decayed without fully washing out motor after-effects
We also asked the extent to which motor and active perceptual after-effects indicated the same recalibration process during motor adaptation. To this end, we assessed the remaining motor after-effects following full washout of active perceptual after-effects. We observed that the active perceptual after-effects fully decayed as subjects walked during the active perceptual task, but their washout did not completely eliminate motor after-effects. Namely, we found that perceptual after-effects decayed exponentially as people walked in the active perceptual task (Fig. 3a: y = c + ae(−x/τ)). This exponential decay was clearly observed in the active perception of the slow step length in all groups (Fig. 3a, top panel: τ [95% CI]; Short-MidSpeed: 24.8 [31.0, 20.8], Long-MidSpeed: 17.7 [14.1, 23.6], Short-SlowSpeed: 27.1 [19.4, 45.0]), but only in the fast step length for groups tested with the short target first (Fig. 3a, bottom panel: τ [95% CI]; Short-MidSpeed: 25.7 [19.4, 37.8], Long-MidSpeed: 2.4 [−0.86, 3.0], Short-SlowSpeed: 53.2 [37.2, 93.1]). These findings further support that subjects did not have perceptual shifts of the fast leg’s step length when probed with long steps. Interestingly, the active perceptual task did not fully washout motor after-effects. This was tested by comparing perceptual after-effects at the end of the active perceptual task (Fig. 3b: Late Perception) and the remaining motor after-effects tested immediately afterwards (Fig. 3b: Early Post-Adaptation). Of note, the belts moved at the same tied speed in both instances. The only experimental difference is that in Late Perception subjects aimed at their comfortable step length (recorded during baseline walking) while wearing the VR headset, whereas in Early Post-Adaptation they walked unconstrained (i.e., without any specific instruction) and without VR headset. Thus, washout of motor after-effects by the active perceptual task is expected, as indicated by the qualitatively smaller motor after-effects during Early Post-Adaptation compared to those during the Catch trial (colored dotted lines in Fig. 3b). Two-way repeated measures ANOVAs (factors: epoch and speed) were used for each step length to show that motor after-effects are present after perceptual after-effects are washed out and that the motor after-effects are influenced by speed. Specifically, the slow and fast leg had significant resurgence of the motor after-effects following perceptual testing (Fig. 3b: slow step length: pepoch < 0.001; fast step length: pepoch < 0.001) and the magnitudes of after-effects were regulated by walking speed (Fig. 3b: slow step length: pspeed = 0.04, pspeed#epoch = 0.018; fast step length: pspeed = 0.041, pspeed#epoch = 0.43). In summary, active perception after-effects decayed as subjects walked, but this did not fully washout motor after-effects.

Active perception after-effects, but not motor after-effects, are fully washed out by the end of the perceptual task. (a) Decay of active perception after-effects: We show the %Change in Step Length (i.e., after-effects) for the slow (top panel) and fast step length (bottom panel) over the course of the active perceptual task for the first step length target (i.e., the short target behavior for the Short-Mid Speed and Short-Slow Speed groups and the long target behavior for the Long-Mid Speed group). Note that all groups exhibit an exponential decay of active perception after-effects in both legs except for the fast leg in the Long-MidSpeed group whose τ was not significantly different from zero (lack of significance indicated with a dotted line). This further indicates that subjects did not have significant fast step length perceptual shifts when probed with long step lengths. Perceptual after-effects assessed at target step lengths that were different from the initial probe were not included in the analysis (white spaces). (b) Remaining motor after-effects following the active perceptual task: Colored lines indicate the motor after-effects recorded during the Catch trial (prior to the active perceptual task, Fig. 2b). Bars indicate group means for the slow and fast %Change Step Length at the end of the perceptual task (Late Perception) and at the beginning of the Post-Adaptation period (Early Post-Adaptation). Black lines indicate Fisher’s LSD post Hoc results. Subjects walked at the exact same tied-belt speeds during the Late Perception and Early Post-Adaptation periods. The only difference in these time points was that subjects were prompted to take their comfortable step length during Late Perception, but during Early Post-Adaptation subjects walked unconstrained (i.e., without any specific instruction of where to step). Standard errors are displayed in all plots. Note that the mid speed groups are pooled for this analysis since they experienced the same Adaptation protocol and target step lengths during Late Perception.
Active perception after-effects are mediated by changes in trailing leg perception
Finally, we evaluated the changes in active perception of the leading leg’s position vs. trailing leg’s position to determine if split-belt walking had a unilateral or bilateral effect. Thus, step lengths during active perceptual trials were further decomposed into perceived leading (α) and trailing (X) leg positions (Fig. 4a). We found a predominant effect on the active perception of the trailing leg. The active perceptual after-effects were quantified with symmetry measures (e.g. Xslow − Xfast) such that values different from zero indicated active perceptual after-effects. Our results show that the trailing leg’s position (X, Fig. 4b) exhibited greater active perception after-effects for all groups than the leading (α, Fig. 4c) leg’s position (Two-way repeated measures ANOVAs comparing the magnitude of early leg position symmetry with factors of speed and alpha vs. X: pspeed = 0.66, pα vs. X < 0.001, pgroup#α vs. X = 0.086). We separately characterized α and X perceptual after-effects for short and long target step lengths with single exponential fits (y = c + ae(−x/τ)) to determine if they decayed at distinct rates. A separate fit was performed for individuals walking slow vs. those walking at mid speeds. Fits of the data indicate that only the trailing leg position experiences large, persistent changes in perception that decayed as subjects walked in the active perceptual task. This is indicated by the decay of perceptual after-effects probed at either the short step length target (Fig. 4b: τ [95% CI]; Short Target: MidSpeed = 12.5 [10.8, 14.9], SlowSpeed = 36.9 [32.6, 42.7]) or long step length target (MidSpeed = 37.5 [33.4, 42.8], SlowSpeed = 41.0 [33.5, 52.9]). In contrast, the leading leg’s position exhibited smaller perceptual after-effects that were very short lived, regardless of whether they were probed with the short step length target (Fig. 4c: τ [95% CI]; Short Target: MidSpeed = 8.4 [6.4, 12.4], SlowSpeed = 1.2 [−0.01, 2.4]) or the long step length target (MidSpeed = 7.2 [4.7, 15.2], SlowSpeed = 7.3 [3.8, 90.0]). Taken together, these results indicate that active perception shifts in step lengths are primarily due to larger, persistent changes in the perception of the trailing leg’s position, and not the leading leg’s position.

Split-belt Walking Induces Active Perception Changes in the Trailing Leg Position. (a) Schematic of the decomposition of step length into the leading (α) and trailing (X) leg relative to the hips. Both α and X are normalized by the speed specific baseline walking behavior, such that positive values mean the distance from the body is greater following Adaptation and vice versa. Symmetry measures were computed for both X (b) and α (c) and were defined as the differences between these measures on two consecutive steps (slow leg - fast leg). Thus, positive values of %Change X Symmetry here indicates that the slow leg (Xslow) is trailing farther behind than fast leg (Xfast) relative to baseline behavior. Similarly, positive values of %Change α Symmetry would indicate that the slow leg (αslow) is farther in front of the body than the fast leg (αfast) relative to baseline behavior. Note that the X position perception is altered following split-belt walking, but that the α position perception is not altered, as indicated by negligible %Changes in α Symmetry following split-belt walking.
Discussion
We investigated the effects of locomotor adaptation on passive and active step length perception. We observed that split-belt walking induced large changes in the active perception of step length, whereas changes in passive perception were negligible. Thus, locomotor adaptation predominantly changed the estimated limb position due to the updated efferent signals, rather than changing afferent information from sensory inputs. In addition, we found that active perception after-effects were only observed on the trailing limb’s position, indicating that the perceived position of the trailing, but not the leading leg, with respect to the body is recalibrated after locomotor adaptation. Moreover, perceptual and motor after-effects were regulated by how they were tested. Specifically, active perceptual after-effects were altered by step length size, whereas motor after-effects were altered by walking speed. Lastly, the observed perceptual after-effects decayed as subjects walked in the active perceptual task, but motor after-effects remained, raising the possibility that after-effects in these two domains are originated by partially distinct processes.
We find that motor recalibration in locomotion predominantly induces changes in active, but not passive perception of limb position. Namely, we find that the perception of limb position is altered following motor adaptation in locomotion, which supports prior findings that the perception of limb position is susceptible to motor adaptation (e.g.4,5,6,7,8,9,10,13,14,15,16). Perceptual after-effects when subjects actively generated motor commands were large, whereas those when the legs were passively moved were very small. Note that a limitation of our study is that the active and passive perception results cannot be directly compared due to difference in the adaptation epoch, however the current study suggests that sensory signals encoding position remain intact following split-belt walking, as previously suggested17. We acknowledge that these differences in effect size could be due to the distinct adaptation protocols that were used to assess active and passive perceptual after-effects. However, there is evidence that perceptual after-effects in locomotion are larger after gradual than abrupt split-belt walking30. This suggests that the effect size differences that we observe would be even greater should we have used an abrupt protocol, but future studies are needed to test this possibility.
Our passive perception findings contrast multiple reports of shifts in the estimation of hand position following motor adaptation when the arms are moved by the experimenter (e.g.4,5,6,9,13,14,15,16). We believe that this discrepancy between reaching and locomotion suggests that sensory changes post-adaptation arise from mismatched position estimates from different sensory sources (i.e., proprioception and vision), which is less prominent in walking. We also found that active perceptual effects were not observed in the leading leg’s position, as previously reported17, but they were clearly observed in the trailing leg’s position, which had not been assessed before. We posit two potential explanations for the altered estimation of the trailing leg’s position. First, subjects might maintain the expectation that one leg will move faster than the other post-adaptation. As a result, they will stand longer on the leg that walked slow compared to the other as they take steps in the active perceptual task, leading to differences in trailing leg position that are consistent to the ones we see (i.e., Xslow > Xfast). Alternatively, the shifts in position might be due to changes in how subjects perceived the environment. It is known that the perception of symmetric walking speeds is shifted following split-belt walking17,31. More specifically, individuals during post-adaptation perceive the fast leg to move slower and the slow leg to move faster than their actual speed. Subjects might act according to this perception by standing longer on their trailing leg when taking steps with the fast leg and vice versa for steps with the slow leg, resulting in the observed larger Xslow than Xfast values. In sum, subjects’ estimation of limb position is altered following sensorimotor adaptation. This shift is not due to changes to afferent information, but might be due to updated motor commands or altered perception of the environment following adaptation.
We find that motor and perceptual after-effects are susceptible to how they are tested. More specifically, we show that split-belt motor after-effects are sensitive to walking speed26 and perceptual after-effects are sensitive to movement distance23. Thus, our observations that motor after-effects are regulated by walking speed and perceptual after-effects are regulated by step length are consistent with previous literature. However, it should be noted that walking speed and step length are not independent (e.g.27,28) raising the possibility that step length is the factor that regulates both motor and perceptual after-effects. Should that be the case, we speculate that similarity in step lengths sizes during training and testing is a critical feature to maximize after-effects, given the well-known effect of similarity on the generalization of learned movements across conditions18,25,32,33,34. In sum, our results highlight the importance of considering how both motor and perceptual after-effects are tested.
Why did motor after-effects remain after perceptual ones were fully washed out? It is interesting that walking in the active perceptual task did not fully eliminate motor after-effects. We believe this could be due to three possible reasons. First, the perceptual and motor effects were tested under different peripheral vision because subjects were wearing a virtual reality headset in the active perceptual task. This distinct situation constitutes a contextual difference known to reduce the washout of the pattern specific to the split-belt treadmill by walking in a symmetric environment35. Second, the constrained nature of walking in the perceptual task might also influence the remaining motor after-effects. Namely, perceptual after-effects were tested by instructing subjects “where” to step, whereas motor after-effects were tested in unconstrained walking. Constrained and unconstrained movements are thought to be differently controlled (e.g.36). Thus, the fact that individuals were aiming to a target in the perceptual task might have altered the extent to which implicit actions were washed out. Lastly, the limited washout of motor after-effects could also indicate that motor and perceptual after-effects are originated by partially distinct processes. This is supported by previous research showing that motor and perceptual effects exhibit different patterns of saving31 and retention6, distinct adaptation rates10,13 and uncorrelated amounts of adaptation4,7,15,16. They also exhibit different patterns of generalization to other limbs22 or novel targets23,24. Thus, while the limited washout of motor after-effects by the perceptual task might be due to testing differences, it could also indicate that the processes underlying motor and perceptual after-effects might be partially independent.
Split-belt walking may be a viable tool to address perceptual deficits associated with stroke. Notably, stroke survivors’ inability to perceive that their gait is asymmetric is associated with limited recovery of symmetric gait21. Our results indicate that active perception of step lengths can change following split-belt walking, suggesting that a similar effect might be observed post-stroke. It has been shown that split-belt training can correct motor deficits19,20 and it would be interesting to determine if it also corrects perceptual deficits as well. Of note, recent work indicates that perceptual changes in the estimation of speed are reduced with repeated exposure to the split condition31, suggesting that similar reductions would be observed in the shifts of limb position. Thus, there might be a limited long term effect of split-belt walking on perceptual changes. Therefore, future work is needed to understand if split-belt walking has similar effects in the lesioned motor system and whether training protocols could lead to long lasting improvements in motor, as well as, perceptual deficits post-stroke.
Methods
Subjects
We tested the effect of split-belt walking on the passive (Experiment 1: n = 8, 2 females, 24.8 ± 4.8 yrs) and active (Experiment 2: n = 27, 16 females, 25.1 ± 5.4 yrs.) perception of step length in separate groups of subjects. Importantly, we carefully controlled for body motion when we assessed passive perception to evaluate the adaptation of sensory signals, rather than updated predictions of sensory consequences. In addition, we assessed the adaptation of passive and active perception under different conditions (i.e., speed and step sizes) since these could regulate perceptual after-effects, as they modulate motor after-effects. Lastly, we evaluated perceptual changes in both legs, which is important given the bipedal nature of locomotion. This study was approved by the University of Pittsburgh’s Institutional Review Board, was carried out in accordance with the approved guidelines, and all subjects provided written informed consent.
Experiment 1: Passive perception
Protocol overview
We tested the passive perception of step length to quantify the adaptation of sensory information (i.e., afferent signals) following the adaptation of movements, which is done by asking subjects to localize their limbs after they have been passively moved (e.g.4,5,6,9,13,14,15,16). Thus, in this experiment participants reported their estimate of the distance between their legs after the legs were passively moved with a split-belt treadmill on which subjects maintained standing balance. This was done before and after split-belt walking to quantify the change in the perceived distance between the legs following locomotor adaptation (split session). We also evaluated the changes in passive perception of step length following regular walking in a different experimental session (i.e., tied session). This was done to control for the possibility that subjects changed their perceived step length simply due to walking for an extended period of time on a treadmill, and not because they exhibited motor adaptation. The extent of adaptation in the motor and sensory domains was quantified with motor and perceptual after-effects during each experimental session (split and tied) (Fig. 5a).

Locomotor and Passive Perception Protocol. (a) Locomotor epochs (colored blocks) and Passive Perceptual epochs (greyscale blocks) were included in both the control and testing session. Note that subjects were standing during the passive perceptual trials and walking during the locomotor trials. (b) Passive Step Length Tasks: Subjects’ legs were passively moved to a target step length. Subjects maintain an equal distribution of their weight between their feet using visual feedback displayed in the virtual reality headset. Subjects indicated their perceived step length size using an analog scale that was also displayed. Only during training, participants received feedback on their perceived vs. actual step length along the analog scale. This was done such that individuals could learn the mapping between what they felt and what was displayed in the analog scale. (c) Baseline and Post-Washout Perceptual Trials: Subjects’ performance during the Baseline Perceptual Trials for both sessions and the Post-Washout Trials for the split session are shown for each leg. Note that subjects could discern three distinct step lengths from the beginning (Baseline) until the end (Post-Washout) of the experiment. Thus, any performance changes between the Baseline vs. Post-Adaptation epochs were attributed to shifts in subjects’ passive perception of step length, rather than subjects’ inability to maintain the mapping between the imposed step lengths and the analog scale.
In summary, our protocol was designed to address the question of whether locomotor adaptation induced sensory adaptation by testing the effect of split-belt walking on the passive perception of step length. The protocol consisted of two different tasks: a passive perceptual task and a locomotor task. The passive perceptual task was designed to assess subjects’ perception of step length after their legs were passively moved. The locomotor task was designed to test the effect of either split-belt walking (split session) or regular walking (tied session) on the passive perception of step length.
Locomotor task
The locomotor task included four epochs: Baseline, Adaptation, Re-Adaptation, and Washout epochs. All phases were the same in the tied and split sessions, except for the Adaptation and Re-Adaptation epochs during which subjects walked with either the legs moving at the same speed (tied session) or different speeds (split session). This was done to contrast the changes in passive perception of step length following an extended period of split-belt walking (split session) vs. regular walking (tied session). Speed profiles for each session are displayed in Fig. 5a. In the tied session, both legs moved at 1 m/s throughout the experiment. The split-belt perturbation was gradually introduced during the Adaptation epoch for consistency with prior work studying passive perception (e.g.4,13,15,16,37). This was also done to maximize the possibility of observing the adaptation of sensory information given that perceptual after-effects have been reported to be larger following gradual than abrupt perturbations30. Figure 5a shows that both belts started moving at 1.0 m/s and linearly diverged for 600 strides until they reached a 3:1 split-belt ratio (i.e., 1.5 m/s: 0.5 m/s) that was maintained for 200 strides, resulting in a total of 800 strides for the Adaptation epoch. Subjects’ passive perception of step length was assessed immediately before and after the Adaptation epoch. We re-exposed individuals to either the tied condition (i.e., both legs at 1 m/s) or split condition (i.e., 1.5 m/s: 0.5 m/s) during a Re-Adaptation epoch to subsequently evaluate motor after-effects in each subject. We chose to evaluate motor after-effects following the perceptual task to avoid changes in perception due to multiple transitions between tied and split environments, which are known to alter perceptual effects31. The Re-Adaptation epoch lasted 300 strides to ensure individuals reached a similar steady state as in the Adaptation epoch prior to assessing motor after-effects. Then, we evaluated motor after-effects during a Washout epoch (450 strides) when the two legs moved at the same speed (1 m/s). Subjects walked in this tied environment for 450 strides to fully wash out any split-belt after-effects before testing subjects’ retention of the mapping between the imposed step lengths and the analog scale used in the passive perceptual trials.
Passive perceptual task
The passive perceptual task consisted of two kinds of trials: passive training and passive perceptual trials. The passive training trials were done such that individuals were well-familiarized with the interface used to report the passively perceived distance between their feet (i.e., step length). The passive perceptual trials were used to assess subjects’ perceived step length when their legs were passively moved. In all trials within the passive perceptual task, subjects wore a virtual reality headset (Oculus, Facebook Technologies, Irvine, CA, United States) to eliminate the possibility of using visual information to bias subjects’ estimate of step length. Subjects stood with their weight evenly distributed between the two feet and with each foot placed on one belt of the split-belt treadmill. Participants experienced the same sequence during all trials in the passive perceptual task (Fig. 5b). First, legs were passively moved to a specific step length value (ankle to ankle distance) (Fig. 5b, first panel). This was done by independently translating the belts of the split-belt treadmill on which the subjects were standing at variable speeds. Then, belts were stopped and subjects were asked to distribute their weight equally between their feet by maintaining their center of pressure (green dot) within a target region (blue rectangle) (Fig. 5b, second panel). We enforced this equal weight distribution between the feet, so that subjects had to assess their step length in a semi-static position, rather than shifting their weight back-and-forth between the feet, which would add an active component to their assessment. Subjects maintained this balanced position for 5 seconds during which they had to indicate their perceived step length using a clicker that moved a cursor (red dot) along an analog scale displayed in the virtual reality headset (Fig. 5b, third panel). Then, a new perceptual trial was initiated by moving the legs to a different step length value. Subjects received feedback of the actual step length in the analog scale (blue dot) only during the passive training trials described below (Fig. 5b, fourth panel). Subjects did not lift their feet off the belts when the belts were moving or still. We alternated the leg that was placed forward after every trial.
Passive training trials: Subjects trained extensively to become familiar with the interface to report their perceived step length and learn the relation between the imposed step lengths and the analog scale. Training occurred at the beginning of every session. The analog display observed by all subjects is shown in Fig. 5b. The middle of the analog scale corresponded to a medium size step length computed as 75% of each subject’s averaged step length during baseline walking at 1.0 m/s (which was identified as a comfortable semi-static posture with pilot testing). We also tested the perceived step length at other distances to determine the effect of step length size on perceptual after-effects. Thus, subjects additionally trained on targets 8 cm shorter (short step length) and longer (long step length) than the medium size step length. Subjects experienced 10 or 21 iterations of each of the target step lengths in a random order. Three out of the 8 participants had an additional training session with only training trials to determine if improved accuracy at the task would allow us to identify small perceptual shifts. However, we did not see any evidence indicating that the results would change with extended training.
Passive perceptual trials: Passive perceptual trials were used to evaluate subjects’ perceived step length at three different epochs during the experiment: Baseline, Post-Adaptation, and Post-Washout (in the split session only). The trials in the Baseline block were experienced immediately after training, those in the Post-Adaptation block were tested right after the Adaptation epoch during each session, and those in the Post-Washout block were presented following a period of tied walking in which we expected all after-effects to be eliminated. The performance of the perceptual trials during the Baseline block were used to determine if subjects could differentiate the distinct step length sizes with the analog scale (i.e., Baseline Perceptual epoch performance). The difference in performance during the Post-Adaptation block relative to the Baseline block was used to determine if passive perception of step length size was altered by the Adaptation epoch. Lastly, the difference in performance during the Post-Washout block relative to the Baseline block was used to determine if changes in the reported step length with the analog scale were due to perceptual changes, rather than forgetting of the mapping between the sensed step length and the analog scale. Each block consisted of several iterations (10 or 21) of one of the three target sizes (i.e., small, medium, large) presented in a random order. Subjects performance was computed as the mean value that they selected in the analog scale across all passive perceptual trials at each target size. While we tested the same target step length values in all trials, subjects were told that they would experience step lengths all along the analog scale, including values that were shorter or longer than those they experienced during training. This was done to prevent subjects from reporting step lengths that were limited to the targets in which they were trained. Figure 5c indicates that subjects learned to discern the three step length values they experienced when their legs were passively moved (Fig. 5c: two-way repeated measures ANOVA testing the effect of target and session on perceived step length; Slow Leg: ptarget < 0.001, psession = 0.59, ptarget#session = 0.56; Fast Leg: ptarget < 0.001, psession = 0.32, ptarget#session = 0.71). Next, it was determined if passive perception of step length size was altered by split belt walking by comparing the Baseline Perceptual performance and Post-Adaptation performance (see results). Finally, we tested subjects’ passive perception at the very end of the split session in a Post-Washout epoch, during which subjects’ perception of the short and long step length were probed 7 or 10 times each. Thus, subjects’ perception of the short and long step lengths was compared between the Baseline Perceptual and Post-Washout epochs. We found no differences between epochs or target step lengths (Fig. 5c: two-way repeated measures ANOVA testing the effect of epoch and target on perceived step lengths: Slow Leg: pepoch = 0.80, ptarget < 0.001, pepoch#target = 0.13; Fast Leg: pepoch = 0.88, ptarget < 0.001, pepoch#target = 0.83). This indicated that individuals could classify well the distinct step length values throughout the duration of the experiment. Six out of the eight participants on this task also trained with step lengths that were 4 cm shorter and longer than the medium size step length. Our results did not change when either more step length sizes were assessed (e.g. 5, rather than 3, target step lengths) or more instances of each step length size were tested (e.g. 21, rather than 10).
Experiment 2: Active perception
Protocol overview
We tested the active perception of step length to determine if split-belt walking updates the predicted sensory consequences of people’s movement. This is done by assessing the active perception of limb position when subjects actively move to target positions5,6,7,8,9,10. Thus, in this experiment participants actively took step length sizes specified by the experimenter. This was done before and after split-belt walking to quantify the change in the actively perceived distance between the legs following locomotor adaptation (split session) or regular walking (tied session). Because we had hypothesized that perceptual after-effects might be sensitive to testing condition like motor after-effects26, perceptual and motor after-effects were tested under distinct walking speeds (i.e., mid and slow). Moreover, speed naturally regulates the magnitude of step lengths27,28. Therefore, we evaluated the possibility that active perception of step length would be distinct for different step length sizes (i.e., long and short). These experimental conditions resulted in three groups designated first by testing speed and second by the first step length size at which active perception was probed (Long-MidSpeed, Short-MidSpeed, Short-SlowSpeed). Of note, both step length sizes were tested in all groups, but we altered the order at which the perception of step lengths were probed (i.e., long first vs. short first) given our expectation that active perceptual after-effects would decay as subjects performed the active perceptual task. In summary, motor and active perceptual after-effects were tested at either a slow (0.5 m/s) or mid (1 m/s) walking speed, and active perceptual after-effects were first measured at either short or long step lengths. The extent of adaptation in the motor and sensory domains was quantified with motor and perceptual after-effects during each experimental session (split and tied) (Fig. 6a).

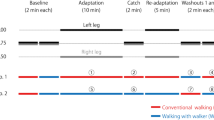
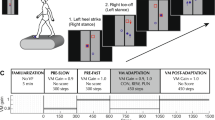
Locomotor and Active Perception Protocol. (a) Locomotor (colored blocks) and Active Perceptual (greyscale blocks) epochs were included in both the control and testing session. Note that subjects were walking during the active perceptual trials. (b) Active Step Length Task: Subjects walked on the treadmill while wearing a virtual reality headset. Note that subject’s walking speed depended on the group. Subjects saw a grid where each grid corresponded to 2 cm in real space. The blue highlighted grid line indicated a target step length that subjects should take. Grid 7, 10, and 13 corresponded to short, medium, and long step lengths, respectively. During training trials, subjects received accurate endpoint feedback on each step length. During Map Tests, subjects did not receive any feedback on their performance. During perceptual trials, subjects received reduced error feedback (i.e., subjects only saw 35% of the error that they made). (c) Map Test: Subjects performance during the Map Test indicated how well subjects learned and retained the spatial mapping between step lengths prompted with biofeedback and taken step lengths. Note that subjects learned distinct step lengths that were well maintained from the beginning until the end of the experiment. Thus, any changes in the active perception of step length are due to perceptual changes rather than subject’s inability to learn or maintain a mapping between prompted and taken step lengths.
In summary, our protocol was designed to address the question of whether split-belt walking changed the active perception of limb position. The protocol consisted of two different tasks: an active perceptual task and a locomotor task. The active perceptual task was designed to assess subjects’ perception of step length while they were walking by prompting subject to take steps of specific sizes. The locomotor task was designed to test the effect of either split-belt walking (split session) or regular walking (tied session) on the active perception of step length.
Locomotor task
The locomotor task included five epochs: Baseline, Adaptation, Catch, Re-Adaptation, and Post-Adaptation epochs. All phases were the same in the tied and split sessions, except for the Adaptation and Re-Adaptation epochs during which subjects walked with the legs moving at either the same speed (tied session) or different speeds (split session). This was done to contrast the changes in active perception of step length following an extended period of split-belt walking (split session) vs. regular walking (tied session). Speed profiles for each session are displayed in Fig. 6a. In the tied session, both legs moved at the group-specific walking speed (either 0.5 m/s or 1 m/s) during the Baseline, Catch, and Post-Adaptation epochs, and all groups walked at 1 m/s during the Adaptation and Re-Adaptation epochs. During the split session, all groups walked for 600 strides at a 3:1 split-belt perturbation (1.5 m/s and 0.5 m/s) during the Adaptation epoch. Unlike Experiment 1, we introduce the split-belt perturbation abruptly because it has been shown that active perception adapts more slowly than motor recalibration10. Thus, we wanted to maximize the exposure of the full split condition before assessing perceptual after-effects. Motor after-effects were characterized following Adaptation in a short tied Catch epoch at the group-specific walking speed. We re-exposed individuals to either the tied condition (i.e., both legs at 1 m/s) or split condition (i.e., 1.5 m/s: 0.5 m/s) for 200 strides during the Re-Adaptation epoch to subsequently evaluate perceptual after-effects in each subject. Subjects’ active perception of step length was assessed immediately before Adaptation and after Re-Adaptation. Following washout of the Post-Adaptation active perception after-effects, any remaining motor after-effects were extinguished during 150 strides of tied walking at the group-specific speed. Finally, subjects’ retention of the mapping between the taken and prompted step lengths was assessed (see section below).
Active perception task
The active perceptual task consisted of three kinds of trials: active training, map test, and active perceptual trials. The active training trials were done such that individuals were able to consistently take prompted step length sizes. The map test trials were performed right after active training trials and at the very end of each session to ensure that subjects had learned and retained the ability to take the prompted step lengths. The active perceptual trials were used to assess subjects’ perceived step length as indicated by the accuracy to take prompted step length sizes. Subjects wore a virtual reality headset (Oculus, Facebook Technologies, Irvine, CA, United States) to eliminate the possibility of using visual information to bias subjects’ estimate of step length. Subjects performed the active perceptual task as they walked while lightly touching (<2N, enforced with verbal feedback) an instrumented handrail located in front of the treadmill. This was done to ensure that individuals would maintain their position on the treadmill while walking with the virtual reality headset38. Subjects received trial-specific feedback on their step length on a numbered grid that was displayed in the virtual reality headset (Fig. 6b). Each grid line corresponded to 2 cm in real space. The cursors on the screen indicated the step length when taking a step with the right (orange cursor) or left leg (green cursor). The cursor position for each leg was only updated at heel-strike. The target step length was indicated with the blue highlighted line on the grid. The comfortable step length (grid #10) corresponded to the average step length during the speed-specific baseline walking. Subjects were also prompted to take a short (grid #7, 6 cm shorter than comfortable step length) and long (grid #13, 6 cm longer than comfortable step length) target step lengths. Importantly, the short and long step lengths used in the perceptual task were different from those regularly taken during baseline walking or during the Catch epoch. This was done to test active perceptual effects with step lengths that were distinct from those that subjects would normally take when assessing motor after-effects. Recall that the Short-MidSpeed and Long-MidSpeed groups performed the step length tasks at a mid-walking speed (1.0 m/s), whereas the Short-SlowSpeed group performed the step length tasks at a slow walking speed (0.5 m/s).
Active training trials: Subjects trained extensively to become accurate at taking the three prompted step lengths. Training occurred at the beginning of every session. During training, subjects received feedback on 100% of their step length error, where step length error is defined as the distance between the target step length and the executed step length. Subjects experienced targets in 4 sets where each set included each of the three targets in a random order. Each presentation of the target included 50 strides with visual feedback followed by 10 strides with no visual feedback. This was done to habituate the subjects to performing the perceptual task without feedback and favor the learning and retention process (e.g.39). In total, subjects trained for 720 strides.
Map test trials: Map test trials were used to ensure that subjects had successfully learned and maintained a mapping between the target step lengths prompted by each number on the grid. The map test trials occurred right after the active training trials at the end of every session. During this map test, subjects performed two sets of 25 strides for each target (total of 150 strides) without any feedback. The mean performance for each leg and target step length was used to characterize subjects’ performance during the map tests. The first 5 steps of each set for each leg were excluded so that subjects were able to adjust their gait to the new target step lengths. The perceptual training protocol was effective as indicated by the fact that subjects took distinct step lengths for each target step length value (Fig. 6c: two-way repeated measures ANOVA testing the effect of target step length and session on step length for each leg; Slow Leg: pTarget < 0.001, pSession = 0.20, pTarget#Session = 1.00; Fast Leg: pTarget < 0.001, pSession = 0.35, pTarget#Session = 0.80) that were retained for the duration of each session except for the fast leg during the tied session (two-way repeated measures ANOVA with effect of target step length and epoch; Tied Session, slow step length: pTarget = 0.82, pEpoch = 0.79, pEpoch#Target = 0.68; Tied Session, fast step length: pTarget = 0.92, pEpoch = 0.009, pEpoch#Target = 0.37; Split Session, slow step length: pTarget = 0.89, pEpoch = 0.069, pEpoch#Target = 0.80; Split Session, fast step length: pTarget = 0.76, pEpoch = 0.13, pEpoch#Target = 0.72). While the mapping between prompted and taken step lengths was not well maintained for the fast leg during the tied session, qualitatively, subjects still maintained distinct step lengths. Therefore, any changes observed between the Baseline and Post-Adaptation Perceptual trials are due to changes in perception, rather than subjects forgetting of the step length value that they were required to take when prompted by each number on the grid.
Active perceptual trials: Active perceptual trials were used to evaluate subjects’ perceived step length right before Adaptation in a Baseline block and right after Re-Adaptation in a Post-Adaptation block. The difference in performance during the Post-adaptation block relative to the Baseline block was used to determine if the actively perceived step length was altered by the Adaptation and Re-Adaptation epochs. Specifically, the mean behavior of the first target step length in Post-Adaptation was reported as a percent change relative to the mean behavior of the first target step length in Baseline. For the step length decay behavior (Fig. 3), each step during the Baseline and Post-Adaptation block was normalized relative to mean speed-specific locomotor task Baseline behavior and then step-by-step Baseline behavior is subtracted from the Post-Adaptation behavior. For the α and X decays (Fig. 4), the α and X for each step was normalized by speed-specific locomotor task Baseline behavior and then a symmetry term was computed (slow-fast). To determine if active perception was altered, subjects needed to be able to have large step length errors without receiving feedback that would illicit strategic movement corrections that could override perceptual shifts. However, pilot data indicated that subjects needed some feedback to stay on task for the duration of the active perceptual trials. Therefore, 35% of subjects step length error was projected during the active perceptual trials without the subjects’ knowledge in order to observe active perceptual shifts and their natural decay (e.g., if subjects had a 10 cm step length error, the feedback only indicated that there was a 3.5 cm step length error). Recall that the Short-MidSpeed and Short-SlowSpeed group started with short targets whereas the Long-MidSpeed group started with long targets. Subjects alternated between the short and long target step lengths in a predefined manner in order to characterize the decay of any temporally persistent perceptual shifts (455 strides total: 10 strides first target, 15 strides of the second target, one set of the short and long target for 15 strides, one set of the short and long target for 25 strides, three sets of the short and long target for 50 strides, 50 strides of the comfortable step length). Note that because all groups took the same number of strides, that it took the group walking slow (0.5 m/s) twice as long to complete the perceptual trials as the groups walking at the mid speed (1 m/s).
Data collection
Kinematic data were collected to characterize subjects’ locomotor behaviors while walking on the treadmill during locomotor and perceptual trials. A motion analysis system (Vicon Motion Systems, Oxford, UK) was used to collect kinematic data at 100 Hz. A quintic spline interpolation was used to fill gaps in the raw kinematic data (Woltring; Vicon Nexus Software, Oxford, UK). Subjects’ movements were tracked via passive reflective markers placed bilaterally over the hip (greater trochanter) and ankle (lateral malleoulous) and asymmetrically on the thigh and shank to distinguish the legs. The duration of treadmill trials was defined by real time kinetic detection of heel strikes. Heel strikes were identified with raw vertical kinetic data collected from the instrumented treadmill (Bertec, Columbus, OH, United States).
Perceptual task
Custom written Vizard (WoldViz, Santa Barbara, CA, United States) and MATLAB (The MathWorks, Inc., Natick, MA, United States) code was used to control the treadmill in order to impose desired step lengths during the passive perception tasks and to provide appropriate feedback during all perceptual tasks.
Statistical analysis
The statistical analyses were performed as reported in the text. A significance level of α = 0.05 was used for all analysis. Stata was used to perform all statistical analysis (StataCorp LP, College Station, TX).
Data availability
The datasets generated during and/or analyzed during the current study are available on Open Science Framework (https://osf.io/fex8t/).
References
Wong, A. L. & Shelhamer, M. Saccade adaptation improves in response to a gradually introduced stimulus perturbation. Neurosci. Lett. 500, 207–211 (2011).
Ghez, C., Hening, W. & Gordon, J. Organization of voluntary movement. Curr. Opin. Neurobiol. 1, 664–671 (1991).
Park, S., Toole, T. & Lee, S. Functional roles of the proprioceptive system in the control of goal-directed movement. Percept. Mot. Skills 88, 631–647 (1999).
Cressman, E. K. & Henriques, D. Y. P. Reach Adaptation and Proprioceptive Recalibration Following Exposure to Misaligned Sensory Input. J. Neurophysiol. 103, 1888–1895 (2010).
Haith, A., Jackson, C. P., Miall, R. C. & Vijayakumar, S. Unifying the Sensory and Motor Components of Sensorimotor Adaptation. Adv. Neural Inf. Process. Syst. 593–600 (2009).
Ostry, D. J., Darainy, M., Mattar, A. A. G., Wong, J. & Gribble, P. L. Somatosensory Plasticity and Motor Learning. J. Neurosci. 30, 5384–5393 (2010).
Salomonczyk, D., Henriques, D. Y. P. & Cressman, E. K. Proprioceptive recalibration in the right and left hands following abrupt visuomotor adaptation. Exp. Brain Res. 217, 187–196 (2012).
Salomonczyk, D., Cressman, E. K. & Henriques, D. Y. P. The role of the cross - sensory error signal in visuomotor adaptation. Exp. Brain Res. 228, 313–325 (2013).
t’ Hart, B. M., Henriques, D. Y. P., Marius, B. & Henriques, D. Y. P. Separating predicted and perceived sensory consequences of motor learning. PLoS One 11, 1–15 (2016).
Zbib, B., Henriques, D. Y. P. & Cressman, E. K. Proprioceptive recalibration arises slowly compared to reach adaptation. Exp. Brain Res. 234, 2201–2213 (2016).
Synofzik, M. et al. Internalizing Agency of Self-Action: Perception of One’ s Own Hand Movements Depends on an Adaptable Prediction About the Sensory Action Outcome. 1592–1601, https://doi.org/10.1152/jn.00104.2006 (2009).
Izawa, J. & Shadmehr, R. On-Line Processing of Uncertain Information in Visuomotor Control. J. Neurosci. 28, 11360–11368 (2008).
Mattar, A. A. G., Darainy, M. & Ostry, D. J. Motor learning and its sensory effects: time course of perceptual change and its presence with gradual introduction of load. J. Neurophysiol. 109, 782–791 (2013).
Van Beers, R. J., Sittig, A. C. & Denier van der Gon, J. J. Integration of proprioceptive and visual position-information: An experimentally supported model. J. Neurophysiol. 81, 1355–1364 (1999).
Cressman, E. K. & Henriques, D. Y. P. Sensory Recalibration of Hand Position Following Visuomotor Adaptation. J. Neurophysiol. 102, 3505–3518 (2009).
Salomonczyk, D., Cressman, E. K. & Henriques, D. Y. P. Neuropsychologia Proprioceptive recalibration following prolonged training and increasing distortions in visuomotor adaptation. Neuropsychologia 49, 3053–3062 (2011).
Vazquez, A., Statton, M. A., Busgang, S. A. & Bastian, A. J. Split-belt walking adaptation recalibrates sensorimotor estimates of leg speed but not position or force. J. Neurophysiol. 114, 3255–3267 (2015).
Hoogkamer, W. & O’Brien, M. K. Sensorimotor recalibration during split-belt walking: task-specific and multisensory? Journal of Neurophysiology 116, 1539–1541 (2016).
Reisman, D. S., McLean, H., Keller, J., Danks, K. A. & Bastian, A. J. Repeated split-belt treadmill training improves poststroke step length asymmetry. Neurorehabil. Neural Repair 27, 460–468 (2013).
Lewek, M. D., Braun, C. H. & Wutzke, C. The role of movement errors in modifying spatiotemporal gait asymmetry post stroke: a randomized controlled trial. Clin. Rehabil. 32, 161–172 (2018).
Wutzke, C. J., Faldowski, R. A. & Lewek, M. D. Individuals Poststroke Do Not Perceive Their Spatiotemporal Gait Asymmetries as Abnormal. Phys. Ther. 95, 1244–1253 (2015).
Mostafa, A. A., Salomonczyk, D., Cressman, E. K. & Henriques, D. Y. P. Intermanual transfer and proprioceptive recalibration following training with translated visual feedback of the hand. Exp. Brain Res. 232, 1639–1651 (2014).
Mostafa, A. A., Kamran, R., Bahari, G., Erin, K. & Henriques, D. Y. P. Generalization of reach adaptation and proprioceptive recalibration at different distances in the workspace. Exp. brain Res. 233, 817–827 (2015).
Cressman, X. E. K. & Henriques, D. Y. P. Generalization patterns for reach adaptation and proprioceptive recalibration differ after visuomotor learning. J. Neurophysiol. 114, 354–365 (2015).
Jensen, L., Prokop, T. & Dietz, V. Adaptational effects during human split-belt walking: Influence of afferent input. Exp. Brain Res. 118, 126–130 (1998).
Vasudevan, E. V. L. & Bastian, A. J. Split-belt treadmill adaptation shows different functional networks for fast and slow human walking. J. Neurophysiol. 103, 183–91 (2010).
Orendurff, M. S., Bernatz, G. C., Schoen, J. A. & Klute, G. K. Kinetic mechanisms to alter walking speed. Gait Posture 27, 603–610 (2008).
Dewolf, A. H., Ivanenko, Y., Zelik, K. E., Lacquaniti, F. & Willems, P. A. Kinematic patterns while walking on a slope at different speeds. J. Appl. Physiol. 125, 642–653 (2018).
Torres-Oviedo, G. & Bastian, A. J. Natural error patterns enable transfer of motor learning to novel contexts. J. Neurophysiol. 107, 346–56 (2012).
Vazquez, A. Learning of Action and Perception in Walking. Doctoral dissertation, Johns Hopkins University, https://doi.org/10.1145/3132847.3132886 (2015).
Leech, K. A., Roemmich, R. T., Day, K. A. & Bastian, A. J. Movement and perception recalibrate differently across multiple days of locomotor learning. J. Neurophysiol. 114, 608–623 (2018).
Bouton, M. E., Nelson, J. B. & Rosas, J. M. Stimulus generalization, context change, and forgetting. Psychol. Bull. 125, 171–186 (1999).
Spear, N. E. The processing of memories: forgetting and retention. (Hillsdale, 1978).
Tulvig, E. & Thomson, D. M. Encoding specificity and retrieval processes in episodic memory. Psychol. Rev. 80, 352–373 (1973).
Torres-Oviedo, G. & Bastian, A. J. Seeing Is Believing: Effects of Visual Contextual Cues on Learning and Transfer of Locomotor Adaptation. J. Neurosci. 30, 17015–17022 (2010).
Desmurget, M., Jordan, M., Prablanc, C. & Jeannerod, M. Constrained and Unconstrained Movements Involve Different Control Strategies. J. Neurophysiol. 77, 1644–1650 (1997).
Cressman, E. K., Salomonczyk, D. & Henriques, D. Y. P. Visuomotor adaptation and proprioceptive recalibration in older adults. Exp. Brain Res. 205, 533–544 (2010).
Forero, J. & Misiaszek, J. E. The contribution of light touch sensory cues to corrective reactions during treadmill locomotion. Exp. Brain Res. 226, 575–584 (2013).
Winstein, C. J. & Schmidt, R. A. Reduced frequency of knowledge of results enhances motor skill learning. J. Exp. Psychol. Learn. Mem. Cogn. 16, 677 (1990).
Acknowledgements
The authors would like to acknowledge the invaluable feedback from Jeffrey Yau on the passive perception experimental design and analysis and Pablo Iturralde on the active perception experimental design and analysis. This work is funded by NSF1535036 and C.S. is funded by a NSF fellowship (GRFP).
Author information
Authors and Affiliations
Contributions
G.T.-O. and C.S. were involved with the conception and design of the work. C.S. and M.G.-R. collected and analyzed the data. C.S. and G.T.-O. interpreted the results. C.S. drafted the manuscript, which was carefully revised by all authors. The final version of the manuscript has been approved by all the authors who agree to be accountable for all aspects of the work in ensuring that questions related to the accuracy or integrity of any part of the work are appropriately investigated and resolved. All authors qualify for authorship and all those who qualify for authorship are listed.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sombric, C., Gonzalez-Rubio, M. & Torres-Oviedo, G. Split-Belt walking induces changes in active, but not passive, perception of step length. Sci Rep 9, 16442 (2019). https://doi.org/10.1038/s41598-019-52860-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-019-52860-9
- Springer Nature Limited