
Abstract
This paper introduces the first high-performance distributed-mass acoustic sensor made of cascaded differential phase shift suspended slot waveguide sections in a Mach–Zehnder interferometer optical transducer circuit. The heavyweight seismic mass used in traditional optoelectromechanical sensors is replaced by an fg lightweight coupling arm yielding an extra compact fast responding structure enabling utilizing over \(64\) cascaded sections and resulting in enhancing the performance by hundreds of times. The transducer operation relies on converting the acoustic vibration into phase modulation of the light for a splendid performance. The novel sensor architecture challenges achieving optical sensitivities higher than \(33\times {10}^{3} \%/\mathrm{g}\) (33 times supersensitive), operating at ultrasonic acoustic speeds higher than 27 MHz, and recognizing resolutions in the 1 ng order. The programmable sensor is voltage-controlled supporting the operation in multimodes. Four operation modes are elucidated including the natural aspiration force, turbo electrostatic force open-loop voltage control, zero-force closed-loop voltage control, and dynamic turbo-force closed-loop voltage control. Wide dynamic ranges for controlling the optical sensitivity and maximum measurable acceleration up to 115.5 dB are reported. Steering capabilities of the acoustic beam in the azimuth plane are demonstrated utilizing two-spoke and three-spoke directional architectures supporting \(116.64^\circ\) and \(360^\circ\) of respective steering angles. Potential acoustic biosignal-based applications in the medical field are outlined.
Article Highlights
-
1.
The use of distributed-mass slot waveguide cascaded sections allows for maximizing the performance by hundred folds.
-
2.
The research reaches the highest optical supersensitivity figures and it covers ng range resolutions and operation in the MHz ultrasonic speed.
-
3.
The design's compact size allows for integrating advanced units providing steerable motion sensing and adaptive multimode operation.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Motion-wave sensing (MWS) finds important scientific applications in numerous fields including seismology predictions, automation control, the aerospace industry, underwater sonar detection, industrial ultrasonic detection, medical ultrasonography, focused acoustic wave therapy, and medical disability aids. MWS may be based on both passive and active detection principles. In passive sensing, the movement of objects or particles energizes the sensor with the test signal as in listening to the heartbeats. Active MWS is based on measuring the reflections or byproduct interactions formed on object surfaces and organ tissues bombarded with some sort of test wave energy as in ultrasound (US) imaging [1, 2], scanning electron microscopy (SEM) [3], and biosensing utilizing charge-coupled devices (CCDs) [4, 5]. In ultrasonography, the acoustic waves penetrate the human body at speeds varying significantly for the different organ tissue types (clinical ultrasound scanners take the average speed of acoustic waves in the human body around 1540 ms−1 for image reconstruction). As ultrasounds penetrate the tissues they may result in the known wave propagation phenomena of reflection, refraction, scattering, and absorption. The acoustic waves are reflected in the different tissue layers of varying mass densities due to the impedance mismatch [6]. Three-dimensional US imaging may utilize different propagation-related effects including the time lag history of the reflected pulse wave intensity, the frequency-dependent change in phase velocities due to the acoustic dispersion effect, the ultrasound Doppler imaging effect as in providing color details of blood flow [7], and tracking the direction from which the acoustic vibration is detected. US tomography is an important cost-effective and almost risk-free nonionizing radiation technique used for assessment, diagnosis, and treatment in many medical procedures such as unborn fetus development monitoring, echocardiography, neurosonology, and US-guided biopsies. One-dimensional (1D) and two-dimensional (2D) transducer arrays are used in US scanners [8,9,10], although the use of US transducer arrays may require hundreds or thousands of sensor elements. Scanning the acquisition beam in US probes may conventionally be achieved utilizing hand-held and motorized translational, rotational, tilt, and vibration movements [11,12,13]. Exploring the beam forming, focusing, and steering in MWS and the deployment of image processing techniques has been aimed in the literature to steadily improve the performance and reduce the system complexity in US imaging [14,15,16,17,18,19]. Electronic spatial beam-steering of the acoustic wave has the merits of achieving faster raster acquisition of the scanned volume, reaching higher image resolutions, and the utilization of multibeam scanning.
Different US frequencies are used in the medical field for imaging and therapeutic applications. High US frequencies in the MHz range are used for high-resolution ultrasonography (typically clinical sonographic scanners operate within the range of 2 to 18 MHz). In other medical therapeutic applications, low and high ultrasound frequencies may be used. US frequencies within the range of 23–25 kHz are used in ultrasonic lithotripsy for the fragmentation and removal of kidney stones. In high-intensity focused ultrasound (HIFU) shock wave lithotripsy kidney stones are eroded by applying a high-frequency pulse in the range of 1 to 4 MHz to create a cavitation cloud followed by a low-frequency trailing pulse at 500 kHz to force collapsing the cloud and emit a shock wave in the process [20, 21]. The HIFU lithotripsy procedure requires monitoring of the cavitated microbubbles and tracking of the stones. The use of accurate MWS detection and tracking can help with the precise focusing of the US pulses on the stones. The use of MWS precise control in lithotripsy procedures can help to reduce the side effects of incidental injuries in the tissues surrounding the stones [22, 23].
The advances in biomedical engineering and other sophisticated science applications have constantly advocated researchers to look for new methods to invent novel integrated circuit motion-wave sensors with better characteristics and features. Given the application requirements discussed earlier, perfect attributes of a high-performance sensor may require: (1) A miniature footprint so that a single, array, and hybrid architectures may fit on a single integrated chip for multifunction sensing, (2) The use of adaptive control to adjust the sensor’s sensitivity, resolution, measurement range, and frequency bandwidth, and (3) The ability to achieve the design-on-demand performance that covers the application. Good demand features may include high sensitivity, wide bandwidth response, small response time, high measurement signal-to-noise ratio, and minimal operation power such that for example a microsize sensor built into an endoscopic probe [24, 25] would not cause unwanted incidental heating in the patient tissues surrounding the probe. Another important demand is the ability of the sensor to accurately detect acoustic waves incident from different directions. This demand requires the sensor architecture to support unidirectional MWS, being highly directive of small beamwidth, and supporting spatial steering of the acoustic beam. Another feature is the ability of the sensor to both detect and generate acoustic waves supporting active sensing and microforce actuation.
Traditionally piezoelectric transducers are widely used in US imaging and therapy [26,27,28,29,30,31] owing to their piezoelectric property of producing charge/voltage under the influence of mechanical stress applied by an acoustic wave incident on the US membrane that actuates the transducer and the vice-versa inverse piezoelectric response. Piezoelectric transducers made of rigid solid materials are appropriate for operation at high-resonant frequencies but they do not function well at frequencies close to static accelerations. Also, although piezoelectric transducers are simple in structure, cost-effective, and of good electro-acoustic properties they are temperature and humidity dependent. They also require cumbersome methods and complex structures to support spatial steering of the guided wave a task that may be accomplished either conventionally using phased arrays at the cost of massive hardware and serious software management or by utilizing other methods like the underlying theory of frequency-steerable acoustic transducers (FSATs) [32,33,34,35,36]. The FSATs method requires tuning the operating frequency which is not only a difficult and costly procedure but it also suffers from the drawback of having the propagation properties of the human body frequency dependent.
The MWS may also be accomplished using capacitive microelectromechanical systems (MEMS) sensors [37,38,39,40,41]. The operation principle of capacitive motion sensors is simple and they enjoy the lowest cost technology. They may also be characterized by low-temperature dependence, wide dynamic readout range, high resolution, and low noise figures [42, 43]. However, capacitive sensors suffer from the nonavoidable stray capacitance of the feeding arrangements and their vulnerability to electromagnetic interference (EMI) putting a limit to their ability to climb to high supersensitivity figures. Also, most traditional capacitive sensors operate at low frequencies. Acoustic capacitive sensors operating in the MHz US range have also been invented [44, 45] but they require a very small motion sensing capacitance in the \(fF\) range making it difficult to mask the stray capacitance effect and force the detection electronic circuits to be built with the MEMS sensor. The resulting enlarged device size is not suitable for applications that require compactness as in endoscopic ultrasound imaging.
The most sophisticated MWS technology is based on integrated circuit optoelectromechanical systems (ICOEMS); also referred to as microoptoelectromechanical systems (MOEMS). An ICOEMS device usually features a micromachined suspension system that reaches the measurement quantity such as the vibration induced by an incident acoustic wave. The mechanical vibration is transduced into a change in one or more properties of the optical readout system [46,47,48,49,50,51,52,53]. Electrostatic actuation forces may also be used to gain many advantageous features [54,55,56,57,58] of: (1) Controlling the sensor response characteristics, (2) Supporting multimode operation, (3) Enabling self-calibration and response error compensation due to fabrication non-idealities, (4) Utilizing active noise-reduction stability control to quiet the Brownian thermomechanical noise of the suspension system which is a paramount requirement when pushing the sensors to their limits of performance [59,60,61,62,63,64], (5) Compensating mistakenly applied gravitational, lateral, and twist pulsating forces, (6) Having the sensor system programmable to tackle multiple tasks as in performing endoscopic ultrasound active sensing and listening to fluids rumbling noise passive sensing, and (7) Providing electronic beamforming and steering of the acoustic wave.
The readout of ICOEMS sensors studied in the literature has been based on different principles. In geometric optics the MWS methods based on the direct modulation of the light intensity without deploying intensity normalization [65,66,67,68,69,70,71,72] suffer mainly from the issue of the lasing source intensity noise which has the effect of limiting the ability to achieve high performance. In wave optics quality MWS supporting high accuracy and resolution relies on modulating the light phase. The light source intensity noise can be eliminated in the detection algorithm of a motion-to-phase transducer by normalizing the intensity of the measurand light to a reference carrier derived from the lasing source. The MWS, in this case, depends only on the modulated phase of the light allowing the sensor to reach high supersensitivity figures limited by the natural boundaries of the Brownian thermomechanical lattice vibration noise of the suspension system and the background noise of the electronic detection and control circuits which may include the carriers thermal agitation noise (also referred to as Johnson-Nyquist noise), free carriers generation-recombination noise, and shot (\(1/f\)) noise (also referred to as Flicker noise). Recent summary studies [73,74,75,76] indicate that light intensity modulation at its limits may suit MWS within the micro and sub-micro vibrations and that light phase modulation at its limits may suit MWS within the nano and sub-nano vibrations.
Over at least the last three decades zillions of geometric and wave optics MWS sensors were invented utilizing various architectures such as the fiber optic Michelson interferometers (MSIs) which are based on end-face reflection of the light [77,78,79,80], Mach–Zehnder interferometers (MZIs) which are based on the forward transmission of the light [81,82,83,84,85], Fabry Pérot (FP) microcavity sensors [86,87,88,89,90], microcantilever fiber/beam accelerometers [91,92,93,94,95], directional coupler [96,97,98] and photonic bandgap [99,100,101,102,103] microstructures, multidirectional optical motion sensors [104, 105], and many other categories that make the selection of a certain sensor type to fit the numerous land-to-sea-to-sky applications of different fields a difficult and jumbling task for the industry vendors. Albeit ICOEMS sensors are attractive for being compact, accurate, sensitive, resistive to stray EMI, power efficient, and noncorrosive to many biochemical matters, almost all optoelectromechanical sensors previously studied in the literature have known problems. Most of those sensors were specific-application-oriented operating at low frequencies around and below the audio band (in general less than 20 kHz). Albeit the medical/health market sector dominates the use of ICOEMS devices (about \(36\%\) of the marketplace according to [75]), the previously invented optoelectromechanical sensors so far failed to compete with the piezoelectric devices for US imaging and other industrial ultrasonic applications that require vibration sensing response in the MHz range. This has seriously differed many researchers and prominent industry investors for a chronic duration from utilizing the big benefits of ICOEMS for applications that require sophistication. The main reason for this drawback was the adoption of the traditional lumped mass-spring-damper systems (LMSDS) architecture. The use of a bulk seismic mass which was mostly chosen to be heavy relative to the low rigidity of the supporting suspension system in favor of increasing the mechanical sensitivity of the sensor results in slowing down the system response. Additionally, the large size of the seismic mass impeded most previous studies from exploring the option of integrating large-scale directional components on a single photonic chip to utilize the available powerful electronic steering of the acoustic wave.
It is not surprising that the suspension structure of an ICOEMS motion sensor which is usually made from silicon (Si) can be tailored to be very stiff to support measuring extreme ultrasonic speeds such that in science fiction it is possible to utilize inertial force control of an object accelerating in a second close to the light speed. On the contrary principle, the Si suspension system can be made extremely flexible to support measuring \(\mu g to pg\) range accelerations (where \(g\) is the gravitational acceleration). In the previous publication [106] the author has taken several important decisions toward maximizing the performance and broadening the frequency response of ICOEMS acoustic sensors by: (1) Using the photonic suspended slot waveguide as the basic element that accomplishes the motion-to-light interaction by converting the displacement due to the applied acceleration into phase modulation of the light. The nano-to-pico size displacement motion of the suspended slot waveguide beams results in high accuracy and increases the possibility of reaching high supersensitivity, (2) Engaging a similar number of mechanically coupled differential suspended slot waveguides in the two arms of an MZI core motion detection system. In addition to its benefit of converting the phase modulation into intensity modulation of the light for simple detection, the balanced MZI structure helps to reduce the temperature dependency and quiet the sensitivities to the unwanted orthogonal lateral, vertical, and twist forces, (3) Normalizing the intensity of the measurand light to a reference carrier derived from the lasing source to result in quieting the intensity noise that affects the computed phase of the light, and (4) Using an increased number of cascaded suspended slot waveguides in the arms of the MZI system. This allows for increasing the rigidity of the suspended slot waveguides for the same sensitivity demand, and in consequence, the frequency response of the sensor is broadened.
In the last study [106] the author reported reaching only 250 kHz resonant frequency and 1500%/g optical sensitivity due to three main factors: (1) Limiting the scope of the investigated design acceleration, (2) Limiting the number of cascaded transducer sections in the MZI arms to only nine due to the large footprint of the seismic mass that was used of 50 ng per section, and (3) Using the inefficient sluggish LMSDS mechanism. In this study, the design acceleration is relived to at least \({10}^{5}\,{\text{ms}}^{-2}\) enough to engage the frequency response into the MHz range and it can be lifted more on demand. Moreover, the major achievement of this study has been accomplished by adopting the novel principle of using the distributed mass-spring-damper systems (DMSDS) mechanism to proliferate the performance of ICOEMS acoustic sensors to their best limits. The simple idea for the DMSDS principle is that when the heavy mass is removed from the mechanical suspension system the spring can still vibrate to measure the motion under the prominent influence of its own distributed mass, but the spring would need to be made longer to maintain the same sensitivity demand. On comparing the detailed characteristics of lightweight loaded sensors (LWLSs) with heavyweight loaded sensors (HWLSs) it has been found that a DMSDS sensor is better by at least ten times than a similar LMSDS sensor. However, as the DMSDS novel architecture allows for reducing the footprint such that over \(64\) cascaded transducer sections may be used in the MZI arms the overall performance can be amazingly enhanced by over a hundred times compared to the best traditional single-section HWLS. In addition to the magnificent strength of their characteristics, the DMSDS sensors have a simple structure with voltage control that allows utilizing the electrostatic actuation force to support multimode operation and steering capabilities of the acoustic wave for up to a full \(360^\circ\) in the azimuth plane utilizing multidirectional multispoke geometrical sensor architectures.
The characteristics of ICOEMS accelerometers may be compared based on the merit figures of sensitivity, resolution, frequency bandwidth, maximum measurable acceleration (MMA) (also referred to as the full-scale deflection acceleration), and acceleration dynamic range (the range for controlling the MMA by the electrostatic actuation force). Authors in the literature have used different parameters to indicate the sensitivity of their devices influenced by the operation principle and detection method making it sometimes hard to realize the differences in achievements. However, regardless of the used detection method the optical sensitivity (\(\Delta P/\Delta a\)) conveniently taken in %/g unit summarizes the overall sensitivity that maps the acceleration change \(\Delta a\) into an equivalent normalized optical power change \(\Delta P\) of the measurand light. At low frequency response applications as there has been racing in the literature to climb to high sensitivity figures it has become necessary to define a unit for supersensitivity. In this study, one supersensitivity unit (\(su\)) is accounted for the measurement of one-tenth the gravitational acceleration at the MMA range. Therefore, \(1 su=0.1g=1000\%/{\text{g}}\) means that the sensor is one-time supersensitive. In the previous study [106] the author reported a supersensitivity figure of about \(1.5 su\) which was about ten times that reported by Ahmadian et al. [68] which was a bit less than \(0.15 su\). In this study, a supersensitivity figure over \(33 su\) which is over \(220\) times that of Ahmadian et al. is reported.
The resolution of an ICOEMS accelerometer with linear detection characteristics depends on the number of display digits \({D}_{dis}\) used in the detection algorithm to represent the measured acceleration subjected to the noise tolerance of the system and the adjusted value of the MMA which sets the sensitivity controlled by the applied voltages. The relation between resolution \({R}_{\mu g}\) in \(\mu g\) unit and optical sensitivity \({S}_{su}\) in \(su\) unit at the full-scale deflection range of a linear sensor is given by:
“Appendix 1” summarizes basic definitions and interrelations of optical sensitivity and resolution. The relation of Eq. (1) is displayed in Fig. 1 for \(2 to 6\) display digits. At the \(33 su\) supersensitivity reported in this study, the resolution is about \(3.03 \mu g\), 303 ng, and 30.3 ng for the accuracies of three, four, and five display digits, respectively. Table 1 summarizes the expected sensitivities needed to reach some of the μg to ng resolutions for different display digit accuracies. It can be seen in this table that achieving 1 ng resolution at the sacrificed accuracy of five display digits would require inflating the sensitivity to \({10}^{3} su\). Albeit increasing the sensitivity to any desired value is theoretically possible in the design two principal issues stem: (1) The thermo-electromechanical background noise of the electromechanical parts of the sensor may mask the benefit of increasing the sensitivity, and (2) The sensor structure at a very high supersensitivity figure may become too fragile to impact accelerations. In this regard, it would be shown in the results of this study that DMSDS are mechanically much more robust to impact accelerations than LMSDS and therefore they are eligible to reach much higher resolutions. Other constraints that may put limits on inflating the sensitivity and resolution figures of a sensor may include the noise of the electronic readout system and the lasing source noise due to fluctuations in its intensity, phase, and frequency. Equation (1) logically relates the resolution to the sensitivity and the number of readout digits for a linear sensor but it does not quantify the noise effect. The deeper the least significant digit it becomes more noisy depending on the sensor type and the surrounding environment. Highly sensitive sensors that do not utilize voltage control to tune their characteristics may be critically more noisy and cannot be trailed to reach the highest possible sensitivity levels. On the contrary, the sensors studied in this research are voltage-controlled and therefore they may be designed to exhibit reasonable sensitivity figures at the reset voltage guaranteeing operation stability, and when a common mode voltage is applied their sensitivities may be inflated till reaching the critical limits tolerated by the noise margins.

The resolution versus supersensitivity of a WMS-ICOEMS sensor of linear detection characteristics taking the number of accuracy display digits as a parameter in the legend
Table 2 outlines some of the important key differences between this study and the previous study [106] of the author both compared with three other major contributions in the literature. The operation principle of the sensor of Ahmadian et al. [68] in the table was based on the geometric direct intensity modulation of the light benefiting from the features of simple detection, simple structure, and low cost. That sensor could achieve optical sensitivity up to \(145.7 \%/g\) and operate at frequencies below 15.553 kHz. The sensor of Ahmadian et al. is an example of many other similar sensors that did not utilize voltage control to tune their characteristics and allow the operation in different modes. The sensor of Ahmadian et al. could achieve a good balance between maximizing the optical sensitivity and operation at frequencies higher than those achieved by many other authors. However, the achievement of the sensor by Ahmadian et al. cannot withstand the high performance of the distributed mass sensors presented in this study. For example, a distributed mass sensor designed to detect a maximum acceleration of \(10\,{\text{ms}}^{-2}\) in the reset voltages and utilizes \(64\) cascaded sections can reach a maximum optical sensitivity of \(3.35\times {10}^{3} \%/g\) (\(23\) times improvement) and support operation at frequencies up to 23.68 kHz (\(1.52\) times improvement) when applying the maximum possible common mode voltage to it. The operation of the sensor of Taghavi et al. [88] in Table 1 was based on the Fabry-Pérot (FP) microcavity interferometer structure. This sensor is a good example of a traditional sensor actuated by both the inertial force due to the applied acoustic acceleration and the electrostatic force utilizing the voltage applied to the comb finger electrostatic actuators that are located on the two opposite sides of the bulk seismic mass. The study of Taghavi et al. focused on utilizing the negative voltage feedback control to lockin the motion of the bulk seismic mass. The only one studied operation mode yielded a low sensitivity of \(1.16 V/g\) (equivalent to about \(11.6 \%/g\) based on the used \(10 V\) system voltage) and operation at frequencies up to 1.403 kHz. Those figures of optical sensitivity and operation frequency are not competitive compared to the distributed mass sensors. No other operation modes were reported and no steering mechanism of the acoustic beam was proposed by Taghavi et al. sensor. The structure and operation of the sensor by Zhao et al. [50] in Table 1 was based on the Fabry-Pérot cavity principle allowing a traditional heavy seismic mass suspended by two G-shaped beams to modulate the cavity length between two mirrors under the vibration effect modulating the phase and intensity of the light. The sensor of Zhao et al. is a good example of a contemporary traditional sensor that could achieve a high sensitivity of \(183.793 V/g\) which might be equivalent to a percentage sensitivity of around \(1.84\times {10}^{3} \%/g\approx 1.84 su\) when normalized to a system voltage of \(10 V\) at the full-scale deflection. However, the operation speed of the sensor of Zhao et al. (\(89 Hz\) resonant frequency and \(29.3 Hz\) operation bandwidth) is not competitive compared for example to the performance of the same distributed mass sensor mentioned above which is designed to detect a maximum acceleration of \(10\,{\text{ms}}^{-2}\) in the reset voltages and uses \(64\) cascaded sections. Although the sensitivities of the two compared sensors in this case may be considered as competitive with each other the distributed mass sensor covers a much wider operation speeds in the US frequency band of 23.68–103 kHz in the common mode voltage operation.
Almost all previously studied ICOEMS sensors did either not utilize the electrostatic force to control their characteristics or only considered limited options for controlling their operation modes. For example, the sensor of Taghavi et al. [88] was focused on studying the sensor response in the traditional negative feedback voltage application to hold the seismic mass at the standstill position. The sensor of Wang et al. [57] as another example was focused on using the common mode voltage to boost the sensitivity by utilizing the electrostatic force to reduce the spring constant. The application of differential electrostatic forces in fact can support a variety of worthy operation modes. The distributed mass sensors presented in this study cover the operation in four different modes: (1) The natural aspiration force where reset voltages are applied, (2) The turbo-force open-loop voltage where the common mode voltage is applied, (3) The zero-force feedback voltage where negative feedback voltage is traditionally applied to lock in the detection phase at zero value, and (4) The dynamic-force feedback voltage where the feedback voltage is dynamically applied to result in a tunable linear detection phase relationship with the applied acceleration. Each one of those modes has its merits and demerits in applications that are outlined in the results section of the research.
Another important demand that was emphasized in the biomedical applications demonstrated earlier is the inheritance of the voltage-controlled sensor unit to the steering capability of its MWS beam. This important feature has almost not been addressed proficiently by any previously studied ICOEMS sensor that uses a traditional heavy single-section seismic mass mainly due to the bulky size of the sensor. In this research, the compact size of the innovative distributed mass sensors allows grouping the cascaded sensor sections into units referred to as spokes that are electrostatically actuated by separated electrodes and aligned in different directions enabling the steering of the acoustic beam in two dimensions. This outlined steering method which is genuinely presented in this study is demonstrated to achieve spatial steering capabilities of the acoustic beam up to \(360^\circ\) in one plane utilizing multi-spoke architectures controlled by the applied electrode voltages.
The information provided in Table 2 and the careful inspection of the many other ICOEMS acoustic sensors that have been surveyed in this investigation confirm that the novel architecture introduced in this study outperforms all its rivals for its potential of achieving the world record supersensitivity and MHz broadband response. The other prominent features of multimode operation, algorithm-driven multifactor detection, 2D full beam steering, wide dynamic control range, compact footprint that allows integrating different sensor architectures on a single chip for multitasking, and low power consumption entitle the sensors presented in this study to meet the future needs of the most sophisticated applications in the biomedical and other science fields. Furthermore, the detailed linear characteristics provided in this study over a wide stiffness range and the possibility to easily extend the results to any new demand provide the industry partners with an easy-to-use and simple-to-design common template.
The rest of the paper is organized logically. In Sect. 2, the principle of operation is explained and the basic sensor architecture is introduced. In Sect. 3, the computer simulation results are elaborated to cover the aspects of studying the effect of the seismic mass weight on performance, comparing the characteristics of different operation modes, and demonstrating the acoustic wave steering capability of the studied sensor. In Sect. 4, a general discussion of the study results is presented. In Sect. 5, brief conclusions and suggestions for future studies are driven. At last, some related math details are drawn in the appendix section for brevity. A list of the acronyms used in the research paper is also included in the appendix section for clarity.
2 Principle of operation and basic sensor architecture
The overall operation principle of the sensor studied in this research which has common similarities with that studied before in [106] by the same author relies on utilizing the inertial force due to the applied motion to modulate the gap width between the silicon beams of the suspended slot waveguides that are used to introduce the motion-to-light interaction. The modulation of the gap width introduces an intense change in the effective index of the suspended slot waveguide and therefore modulates the phase of the optical mode transmitted in the slot waveguide. By deploying the slot waveguides into the two arms of an MZI the motion-to-phase interaction is converted into intensity modulation of the light which carries the motion information. The converted intensity modulation of the light is used to compute the modulated phase which is proportional to the applied acceleration.
The same silicon-on-insulator (SOI) integration template of 300 nm Si core layer thickness that was used in [106] is chosen in this study to trial the DMSDS concept. This choice eases using the same photonic system parts that were simulated before and it benefits from the SOI technology features of relying on a cost-effective layered integration template that is compatible with the CMOS technology allowing for the combined optoelectronic signal generation, processing, detection, and interaction-conversion [107,108,109,110,111]. The sidewall surfaces of waveguiding structures patterned in the Si layer of the SOI template can be made very smooth in lithography fabrication to reduce the roughness-induced scattering loss [112,113,114,115]. The use of a balanced MZI motion detection circuit having similar elements in its two arms counterbalances the imbalance in the scattering loss and phase errors. The parts of the Si micromachined structure may either be supported by pedestals in the buried silicon dioxide (BOX) layer or are suspended by the concentrated hydrofluoric acid (HF) release step. Full etching of the Si material around the design architecture down to the BOX layer is required in fabrication to provide perfect electrical isolation between the different components of the electromechanical suspension system that are connected to different electrodes. The components that are activated by different electrostatic forces also need to be separated by sufficient distances to minimize the stray capacitances between them.
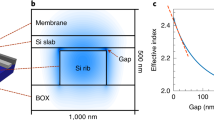
The structure of the suspended slot waveguide introduced in this study which achieves the motion-to-light interaction [116,117,118,119,120] is explained in Fig. 2. The slot waveguide consists of two Si beams each of width \({W}_{gs}=230\) nm and height \(h=300\) nm which represents the Si layer thickness of the integration template. The two beams are separated by an air gap of width \({W}_{s}\) equals to \({W}_{s0}=100\) nm at quiescence (i.e. at static motion and reset voltage). These dimensions of the suspended slot waveguide support the guiding of the fundamental optical mode as an evanescent field in the low-index region between the Si beams [121,122,123]. The simulation results of VPIphotonics have shown that this suspended slot waveguide has the advantage of a weak positive temperature coefficient dependence of around \(\Delta {n}_{s}=2.173\times {10}^{-4} {^\circ{\rm C} }^{-1}\). The length \({L}_{s}\) of the suspended slot waveguide is taken in the study as a variable parameter to set the rigidity of the suspension system. The outer beam of the suspended slot waveguide is affixed at its middle point by a Si strut which acts both as a motion stopper and voltage feed line connecting the beam to an electrode. The inner beam of the suspended slot waveguide is also connected at its middle point to another suspended Si strut which acts as a lightweight coupling arm. The lightweight coupling arm is used to provide mechanical differential push–pull coupling between the middle points of the inner Si beams of two analogous suspended slot waveguides located in the two arms of the MZI. The coupled analogous suspended slot waveguides represent one differential phase shift section of the MZI transducer. Traditionally this suspended coupling arm was used in [106] to provide the differential push–pull coupling effect and to connect the middle points of the inner beams of the cascaded suspended slot waveguides to a heavy seismic mass which provides the principal inertial actuation force. In this study, the inertial actuation force relies on the distributed mass of the suspended Si beams. The dimensions of the lightweight coupling arm are set such that its mass of about \(m\approx 363\) fg is too small enough to approach the peak prominent behavior of DMSDS. When acceleration is applied to the sensor carriage template both beams of the suspended slot waveguide deform in the motion direction. However, the deformation of the inner beam is greater than that of the outer beam because the middle point of the inner beam is free to move whereas that of the outer beam is restricted. This unequal deformation in the beams modulates the gap width \({W}_{s}\) resulting in modulating the refractive index along the length of the suspended slot waveguide and therefore introducing a phase shift difference in the guided optical mode. Having the inner beam connected to the ground electrode, the application of nonzero voltage to the electrode connected to the outer beam introduces a distributed electrostatic actuation force between the two beams of the suspended slot waveguide capacitive structure. The electrostatic actuation force can greatly modify the response of the transducer to the applied acoustic vibration. The power of the optical mode injected into the suspended slot waveguide line should always be kept at low levels to minimize the attractive and repulsive distributed gradient optomechanical force [124,125,126] and minimize the incidental thermoelastic stress as compared to the distributed inertial and electrostatic actuation forces. Feng et al. [127] compared the effects of the optomechanical and electrostatic forces considering a slot waveguide with dimensions comparable to the slot waveguide used in this study. The simulation results of Feng et al. confirm that the optomechanical force is negligible compared to the electrostatic force when the optical power is kept well low in the \(\mu W\) range (below \(100 \mu W\)). The suspended slot waveguide beams have a distributed mass-spring-damper model. The spring effect is introduced due to the elasticity of the Si material. The DMSDS sensors that are designed to operate at low vibration frequencies are mostly affected by the viscosity damping of the air surrounding the suspended beams. However, at high-frequency heavy vibration loading the compressibility damping of the air film around the suspended beams [128, 129] and thermoelastic damping [130, 131] play important roles in the response of the sensor.

The suspended slot waveguide as a distributed-mass electromechanical photonic phase shift transducer
The operation principle of the transducer element of Fig. 2 relies on modulating the phase of the transmitted optical mode due to modulating the gap width between the suspended beams of the slot waveguide. The phase difference \(\Delta \phi\) modulated by the slot waveguide of length \({L}_{s}\) is given by:
where \({n}_{s}\) is the effective index of the slot waveguide which is a function of the modulated gap width \({W}_{s}\). \({n}_{s0}\) is the effective index of the slot waveguide at a standstill and reset voltage. The slot width \({W}_{s}\) is affected by both the inertial force due to the acoustic acceleration applied to the suspension system and the electrostatic force due to the voltage applied between the Si beams of the slot waveguide. The simulation of \({n}_{s}\) as a function of \({W}_{s}\) achieved with VPIphotonics is depicted in Fig. 3 taken for the dimension parameters of Fig. 2 and \(5.6^\circ{\rm C}\) temperature.

Effective index \({n}_{s}\) of the suspended slot waveguide as a function of the slot width \({W}_{s}\) simulated for \({W}_{gs}=230\) nm, \(h=300\) nm, and \(5.6^\circ{\rm C}\)
The basic architecture of the transducer system is explained in Fig. 4. At the core of the sensor is the MZI optical circuit comprising splitter and combiner units interconnected by a phase shift line made of cascaded sections of differentially coupled suspended slot waveguides. Efficient transition slot couplers are used to couple the optical modes between the non-slot and slot waveguides. The figure shows the traditional bulk seismic mass for comparison with the lightweight coupling arm. The voltages \({V}_{1}\) and \({V}_{2}\) are applied by two electrodes to the outer beams of the cascaded suspended slot waveguides. The polarization of the light input from the lasing source has to be matched to the fundamental mode of the input waveguide of the transducer photonic integrated circuit utilizing for example an integrated on-chip polarization controller [132,133,134,135]. The light is then split into two components one is taken as a reference carrier for intensity noise cancellation and the other component is applied to the MZI transducer circuit. The light splitters and combiners can be made of the ubiquitous multimode interference (MMI) couplers relying on their self-imaging principle to create images at the output ports of the optical mode applied at an input port [136,137,138,139,140,141]. The MMI couplers may also be replaced in the design with directional couplers relying on the coupled mode theory and Y-splitting counterparts [142,143,144,145]. The MZI transducer produces two detection intensity-modulated lights referred to as \({O}_{1}\) and \({O}_{2}\). Three photonic detectors (PDs) are used to convert the reference and detection lights into the respective voltages \({V}_{r}\), \({V}_{t1}\), and \({V}_{t2}\). The normalized detection voltage \({V}_{tn}\) might be based on the difference between the detection voltages:
where \({\left|{O}_{1n}\right|}^{2}\) and \({\left|{O}_{2n}\right|}^{2}\) are the respective optical mode powers at the two outputs of the MZI transducer normalized to the input mode power \({\left|I\right|}^{2}\). The motion-induced phase modulation can be extracted from \({V}_{tn}\) in the detection algorithm without being affected by the intensity noise originating from the lasing source. Among the differences between the transducer circuit of Fig. 4 and that introduced in [106] is the use of two different light splitters in the MZI circuit referred to as Type-1 and Type-2. Type-1 splitter is composed of a \(1\times 2\) MMI coupler followed by a \(2\times 2\) MMI coupler both of equal split ratios. Type-2 splitter is made of only \(1\times 2\) MMI coupler of equal split ratio. The two splitters manage the effect of the inherited phase errors of the MMI couplers on the computed detection phase of the applied acceleration differently. When the characteristics of the MMI couplers used in the splitter and combiner units of the MZI circuit are considered to be ideal the detection voltage is simplified to:
where \({\Delta \phi }_{t1}\) and \({\Delta \phi }_{t2}\) are the phase shift differences introduced by the two MZI arms and \({\Delta \phi }_{t}\) is the total phase shift difference. According to Eq. (4) the advantage of using Type-1 and Type-2 splitters is the no need for the length-imbalance calibration of the MZI arms that was needed in [106] to enable measuring the vibration along the \(\pm x\) directions. The programmable arithmetic processing unit is software-based supporting the different features of optical intensity noise suppression, electromechanical suspension system stabilization, and operation mode control. Distance-vector MWS and computerized motion image analysis are also supported when utilizing advanced steerable MWS units. More details of the components used in the true DMSDS sensor are shown in Fig. 5. This figure clarifies the big advantage reality of the DMSDS architecture of greatly reducing the design footprint. The separation between the phase shift lines of the two MZI arms is almost adjusted to be in line with the ports of the MMI couplers that are separated by only 2 μm distance waiving the huge area the seismic mass was taking in traditional sensors. The separation between the analogous waveguides in the two arms of the MZI of 1.89 μm suffices in simulation to ensure almost null crosstalk coupling between them. The margins separating the slot and ridge waveguides from the horseshoe stoppers, lightweight coupling arms, nozzle-type voltage feed junctions, and voltage feed lines are also taken large enough to minimize the optical mode and electrical crosstalk couplings between the different components and minimize the optical split power loss at the midpoint junctions of the suspended slot waveguides. In practice, the separation distances may be increased on demand to ensure better optical and electrical isolation between the different components of the optoelectromechanical transducer without resulting in a significant increase in its footprint as compared to that of a traditional sensor that uses a heavy lumped seismic mass. The horseshoe stopper mechanism may also be completely removed from the structure and the ears of the coupling arm in this case can be removed accordingly resulting in a lighter mass of the coupling arm. This modification helps to bring the behavior of the sensor closer to the prominent distributed mass characteristics and eliminates the possibility of having a sticky touch point between the coupling arm ears and the horseshoe stopper in fabrication. However, in such a case reaching the application of the pull-in effect maximum common mode voltage becomes more critical. With the use of the intestine multiline arrangement shown in Fig. 5, many cascaded differential phase shift sections of more than \(64\) can be patterned in a standard SOI chip resulting in enhancing the DMSDS sensor quality by hundreds of folds as demonstrated in the results section.

Schematic diagram illustrating the system parts of the DMSDS transducer

Schematic diagram illustrating the intestine multiline architecture of the DMSDS transducer core circuit
The MMI couplers may potentially violate the ultimate balance state of the MZI. Real MMI couplers exhibit power split imbalances and more serious phase errors in their outputs. The power imbalances and phase errors are caused by the deviations of the modes propagation constants in the step-index MMI waveguide from the required quadratic dependence with respect to the mode number [136]. The imaging quality can be improved by using tapers at the input and output ports of the MMI coupler to limit the number of low-order modes contributing to the creation of the output images [146,147,148,149]. Other phase error correction methods may be based on subwavelength optimization of the refractive index profile of the MMI waveguide [150,151,152,153,154,155]. Taking the real consideration of non-ideal MMI couplers the deviation in \({V}_{tn}\) and the detection error voltage \({V}_{te}={V}_{tn}-sin\left({\Delta \phi }_{t}\right)\) are simulated in this study for the full-scale deflection range of acceleration which occurs at \({\Delta \phi }_{t}=\pm 90^\circ\). Taking a maximum power imbalance of 0.5 dB and maximum phase error of \(10^\circ\) of the \(1\times 2\) and \(2\times 2\) MMI couplers the following conclusions were reached: (1) The phase errors are more significant in affecting the deviation in \({V}_{tn}\) compared to the power imbalances of the MMI couplers, (2) Type-1 splitter is focused on reducing the deviation in \({V}_{tn}\) at quiescence but it results in larger errors at the MMA, whereas Type-2 splitter behavior is vice-versa, and (3) The deviation in \({V}_{tn}\) for Type-1 splitter is affected more by the phase error of the \(2\times 2\) MMI coupler, whereas the deviation in \({V}_{tn}\) for Type-2 splitter is affected more by the phase error of the \(1\times 2\) MMI coupler. The maximum deviation in \({V}_{tn}\) is found around \(\pm 20\%\) for the \(10^\circ\) phase error of the MMI couplers. Presumably the deviation in \({V}_{tn}\) is predictable in calibration and may be compensated in the detection algorithm or throughout utilizing the control voltages applied to the transducer electrodes. The use of Type-1 and Type-2 splitters in the new design which results in making the arms of the MZI identical not only simplifies the detection of motion in the \(\pm x\) directions but also helps to eliminate the effect of the phase noise of the laser and optical coupling components that may be used in standard laboratory testing procedures. The studied smart sensor uses algorithm-based detection of the phase-modulated acceleration and the effect of the phase errors of the MMI couplers on the detected acceleration can be simply computationally eliminated in the detection algorithm. However, this requires calibrating the sensor before using it in practice.
The basic DMSDS sensor is focused on measuring acceleration along the \(\pm x\) directions, resists accelerations along the \(\pm y\) and \(\pm z\) orthogonal directions, and resists twist torques. The operation mechanism of the introduced DMSDS sensor is similar to that explained in [106] including the regimes of applying a reset, common mode, and feedback voltages. The modeling and analysis of the distributed mass sensor are also similar to those presented in the previous publication. The numerical analysis presented in [106] depends on utilizing the Euler–Bernoulli \({4}^{th}\) order non-linear differential equation that describes the balanced distributed forces applied to each suspended slot waveguide with the solution of the boundary conditions problem applied to each cascaded section of two differentially coupled suspended slot waveguides. The numerical approach presented in Sect. 3 of [106] which provides accurate modeling and analysis of one section of the sensor takes into consideration the effects of the following forces: (1) The distributed mass inertial force \({q}_{n}=h{W}_{gs}{m}_{d}a\) of the suspended Si beams, where \(a\) is the applied acceleration and \({m}_{d}\) is the mass density of the Si core layer, (2) The inertial force applied by the seismic mass \({f}_{m}=ma\), where \(m\) is the mass of the seismic weight attached to the midpoints of the inner Si beams of one cascaded section of two differentially coupled suspended slot waveguides. For the distributed mass sensors \(m\) represents the mass of the lightweight coupling arm, and (3) The distributed electrostatic force \({q}_{V}={\varepsilon }_{o}h/2\bullet {\left(V/{W}_{s}\right)}^{2}\) of the capacitive structure formed between the inner surfaces of the two beams of each suspended slot waveguide, where \({\varepsilon }_{o}=8.854187\times {10}^{-12} F{m}^{-1}\) is the vacuum permittivity, \({W}_{s}\) is the modulated width of the slot between the suspended Si beams, and \(V\) is the voltage applied between the suspended Si beams. The simulation of the refractive index of the suspended slot waveguide of Fig. 3 which is achieved with VPIphotonics was also verified utilizing the standard FIMMPROP simulation tool from Photon Design performed for a smaller range of \({W}_{s}\) values in previous publications of the same author (Hussein et al. [119, 156]) and the results are found identical. These simulations performed by the author are also found in agreement with those performed by Acoleyen et al. [116, 117]. It is also worth mentioning that Acoleyen et al. used a similar numerical analysis to study the response of the suspended slot waveguide although not under the effect of applying acceleration to the structure and the results presented by Acoleyen et al. are found to agree with those presented by the author in the previous publications. The same accurate core script that was developed before has been used in this study including the modifications needed to address the distributed mass concept. The errors set in the numerical computations are always taken minimally smaller than about \({10}^{-6}\) and high-density points are used to draw the characteristic curves presented in the next section to provide credible and reliable databases for the studied distributed mass sensors. The next results section utilizes the same numerical analyses approach that was originally presented in [106] with the simulation of the refractive index of the suspended slot waveguide of Fig. 3 to investigate the newly introduced DMSDS sensor comparing it step-by-step with the LMSDS sensor.
3 Characteristics study of the DMSDS sensor
The basic DMSDS sensor of Fig. 5 has a single-spoke architecture characterized by \(\pm x\) unidirectional MWS. The sensor behavior is controlled by voltage. At reset voltages the acceleration \({a}_{m}\) refers to the MMA at the natural aspiration force (NAF) operation of the sensor where no electrostatic actuation forces are applied to the Si beams of the suspended slot waveguide. The only significant force that deforms the beams in the NAF operation is the inertial actuation force. When non-zero voltages are applied to the sensor electrodes the common-mode voltage \({V}_{c}=\left({V}_{1}+{V}_{2}\right)/2\) and difference voltage \({V}_{d}={V}_{1}-{V}_{2}\) play roles in controlling the sensor characteristics. According to Eq. (A.1), the optical sensitivity of the sensor in the NAF operation is dependent on the design \({a}_{m}\) at full-scale deflection. Both \({a}_{m}\) and the equivalent spring constant \(k\) are reflections of the sensor rigidity which may also be controlled by the electrostatic actuation force. Figure 6 depicts the optical sensitivity in NAF operation taken for the range of \({a}_{m}\) from \(1 to {10}^{5}\,{\text{ms}}^{-2}\). A sensor designed to operate at \(1\,{\text{ms}}^{-2}\) of full-scale deflection in NAF operation is \({10}^{3} \%/g=1 su\) supersensitive. Whereas a sensor designed to achieve \({10}^{5}\,{\text{ms}}^{-2}\) of full-scale deflection in NAF operation is ultrasonic with very low optical sensitivity of \({10}^{-2} \%/g={10}^{-5} su\). In the following subsections, a comprehensive characteristics study of the DMSDS sensor includes: (1) Studying the effect of the lumped seismic mass weight on the performance of ICOEMS sensors, (2) Comparing the characteristics of LWLSs with HWLSs, (3) Studying the influence of different operation modes on modifying the sensor response, (4) Studying the directional MWS characteristics of the sensor, and (5) Studying the MWS beam steering mechanism of multi-spoke DMSDS sensors. All simulation results presented in the study are based on taking fixed boundary conditions for the motion of the suspended slot waveguide beams at the fixed points.

The optical sensitivity \({S}_{op}\) versus the design MMA in the NAF operation \({a}_{m}\) of the sensor
3.1 Studying the effect of the seismic mass weight
The seismic mass of traditional in-plane ICOEMS sensors is crafted in the Si core layer of mass density \({m}_{d}=2329 kg\bullet {m}^{-3}\) (taken for polysilicon). The seismic mass weight should be optimized in design according to the targeted system rigidity. In NAF operation a sensor intended to detect a small \({a}_{m}\) at full-scale deflection efficiently requires seismic mass weight larger than that needed for the detection of a large \({a}_{m}\) value. Therefore, it is wise to tune the seismic mass weight according to the MMA. The length of the suspended slot waveguide \({L}_{s}\) is also dependent on the MMA such that a larger value of \({a}_{m}\) requires smaller \({L}_{s}\) value and vice-versa (i.e. inverse relationship). Therefore, the selection of the seismic mass weight per cascaded section \(m\) may be related to the suspended slot waveguide length \({L}_{s}\) due to the symbiotic relationship between them. To study the effect of scaling \(m\) between the HWLS and LWLS performances a mass scaling factor \(\zeta\) is defined such that:
\(m\) in Eq. (5) represents the mass of an equivalent seismic mass with a square area of arm-length equal to \(\zeta L_{s}\). The total area of the lumped seismic mass \(A_{tm}\) indicates the footprint of the sensor:
where \(N\) is the number of cascaded differential phase shift sections used in the MZI. At \(\zeta =0\) the seismic mass is removed (\({A}_{tm}=0\)) and pure DMSDS performance is reached. In the study, the sensor characteristics at the value \(\zeta =10\) are found to be well saturated to reflect the HWLS performance. To explore the LWLS performance the value of \(m=363\) fg is used according to the design of the lightweight coupling arm shown in the inset of Fig. 5.
The simulation of the total seismic mass area \({A}_{tm}\), seismic mass per cascaded section \(m\), design length \({L}_{s}\), resonant frequency \({f}_{r}\), spring constant \(k\), and mechanical sensitivity per section \({S}_{ms}\) drawn for the range of the area scaling factor \(\zeta\) of the seismic mass from \(0 to 10\) are depicted in Figs. 7 and 8. The number of cascaded sections \(N\) is taken as a parameter in these simulations. The mechanical sensitivity of one section \({S}_{ms}=\Delta x/\Delta a\) indicates the shift \(\Delta x\) in the middle points of the inner beams of the suspended slot waveguides that hold the seismic mass due to the applied \(\Delta a\) acceleration. The accumulated mechanical sensitivity of all cascaded sections is: \({S}_{mt}=N{S}_{ms}\). An optical sensor system with high optical sensitivity \({S}_{op}\) and low sectional mechanical sensitivity \({S}_{ms}\) performs better for being more sensitive, faster, and quieter in operation. The following conclusions may be drawn from the simulation results: (1) The area of the seismic mass of an LMSDS sensor increases drastically with the increase in \(\zeta\) and \(N\) for the same MMA. For example, for \({a}_{m}=1\,{\text{ms}}^{-2}\) and \(\zeta =10\) the area \({A}_{tm}\) is \(380.3 {\left(\mu m\right)}^{2}\) for \(N=1\) and it increases to \(6111.6 {\left(\mu m\right)}^{2}\) for \(N=64\) (i.e. \({A}_{tm}\) increases by a factor of 16.1 when \(N\) is increased from \(1 to 64\)). Whereas for the same MMA of \(1\,{\text{ms}}^{-2}\), the design area needed for the phase shift line of the MZI for a DMSDS sensor is around \(123.3 {\left(\mu m\right)}^{2}\) for \(N=1\) and \(3955.5 {\left(\mu m\right)}^{2}\) for \(N=64\) (determined from a simple calculation of taking \({2NL}_{s,\mu m} {\left(\mu m\right)}^{2}\) assuming a separation of about \(2\mu m\) between the upper and lower arms of the MZI). Therefore, the DMSDS architecture is amenable to utilizing more cascaded differential phase shift sections than LMSDS sensors, (2) The length \({L}_{s}\) of a DMSDS sensor is much longer than that of an LMSDS sensor of similar parameters but the design area of the DMSDS sensor is smaller, (3) The DMSDS sensor is over \(2.6\) times faster in operation than an LMSDS sensor of the same number of cascaded sections. At \(N=64\) and \(\zeta =0\) (for a DMSDS sensor) the operation speed is at least 10.9 times faster than that taken for \(N=1\) and \(\zeta =10\) (for an LMSDS single-section sensor). Therefore, the operation speed can be increased by a factor of more than ten when utilizing the DMSDS principle and increasing \(N\) for the same MMA. At \({a}_{m}=1\,{\text{ms}}^{-2}\) the operation speed is only 2.82 kHz for \(\zeta =10\) and \(N=1\), whereas it increases to 7.8 kHz for \(\zeta =0\) and \(N=1\), and it increases to 41.1 kHz for \(\zeta =0\) and \(N=64\). When designing for \({a}_{m}={10}^{5}\,{\text{ms}}^{-2}\), the DMSDS acoustic sensor speed reaches 4.11 MHz for \(N=64\) at NAF operation. Still, this MHz range operation speed can be increased by designing for a larger \({a}_{m}\) value and it will also be shown that the electrostatic actuation force can effectively pump up this speed. The increase in the operation speed from the \(kHz\) range experienced for many ICOEMS sensors published before to the MHz range is a milestone achievement supporting US applications, and (4) The sectional mechanical sensitivity \({S}_{ms}\) of a DMSDS sensor is much less than that of a heavy seismic mass LMSDS sensor of similar parameters. The ratio of \({S}_{ms}\) for \(\zeta =0\) and \(N=64\) to that taken for \(\zeta =10\) and \(N=1\) is \(4.72\times {10}^{-3}\) representing an improvement of about \(212\) times in motion quietness of the DMSDS sensor compared to that of a single-section LMSDS sensor. In conclusion, it has been found that a DMSDS sensor of multiple cascaded differential phase shift sections can be engineered to perform hundreds of times better than a traditional single-section heavy seismic mass LMSDS sensor. Table 3 lists useful data for the \({L}_{s}\) design length and \({f}_{r}\) operation speed for pure DMSDS sensors (i.e. for \(\zeta =0\)) taken for \(N=64\) and different MMA values of \(1, 10, {10}^{2}, {10}^{3}, {10}^{4}, and {10}^{5}\,{\text{ms}}^{-2}\).

Total seismic mass area \({A}_{tm}\) (up), seismic mass per section \(m\) (middle), and slot waveguide length \({L}_{s}\) (down) versus the seismic mass scaling factor \(\zeta\) taken for two design MMAs in the NAF operation of \({a}_{m}=1\,{\text{ms}}^{-2}\) (left) and \({a}_{m}={10}^{5}\,{\text{ms}}^{-2}\) (right). The legend represents the number of cascaded sections (\(N\))

Resonant frequency \({f}_{n}\) (up), spring constant \(k\) (middle), and sectional mechanical sensitivity \({S}_{ms}\) (down) versus the seismic mass scaling factor \(\zeta\) taken for two design MMAs in the NAF operation of \({a}_{m}=1\,{\text{ms}}^{-2}\) (left) and \({a}_{m}={10}^{5}\,{\text{ms}}^{-2}\) (right). The legend represents the number of cascaded sections (\(N\))
3.2 Sensor robustness and gravitational effect
In the operation of the studied ICOEMS acoustic sensor inertial and electrostatic forces may be applied to the beams of the suspended slot waveguides in different possible directions. The deformation in the beams depends on the magnitudes and directions of the applied forces and the design architecture of the sensor. Along the \(x\)-axis each suspended Si beam is allowed to move by a maximum margin of \(\pm 80\) nm leaving a minimum guard of 20 nm between the suspended slot waveguide beams. The robustness of a sensor can be represented by the impact acceleration that once applied along the motion-sensing direction the suspended Si beams are critically deformed before stepping outside the tolerated range. The simulation of the critical impact acceleration \({a}_{Imp}\) versus the design MMA for LWLSs and HWLSs is depicted in Fig. 9 taken for different \(N\) values. The following conclusions may be drawn from this simulation: (1) For the same \(N\) the ratio of \({a}_{Imp}\) for an LWLS to that of an HWLS is about \(4.44 to 7.63\) of times improvement for the taken \({a}_{m}\) range, (2) The value of \({a}_{Imp}\) of an HWLS is about \(25.1\,{\text{ms}}^{-2}\) for \({a}_{m}=1\,{\text{ms}}^{-2}\) and \(N=1\) addressing it as being fragile and requiring very careful handling in fabrication and usage, whereas the value of \({a}_{Imp}\) of an LWLS is about \(5.32\times {10}^{3}\,{\text{ms}}^{-2}\) (i.e. about 212 times that of the single-section HWLS) for \({a}_{m}=1\,{\text{ms}}^{-2}\) and \(N=64\) addressing it as being very practical in application. This is why DMSDS sensors truly merit achieving the world record for highest supersensitivity as they can be safely designed for smaller MMA values, and (3) A one-section LWLS can withstand \({a}_{Imp}\) values about the same as those for an eight-section HWLS and it requires much less footprint.

Critical impact acceleration \({a}_{Imp}\) versus the design MMA in the NAF operation \({a}_{m}\) for LWLSs (\(m=363\) fg) and HWLSs (\(\zeta =10\)) taking \(N\) as a parameter
To study the effect of the gravitational force on the sensor operation the gravitational extinction ratio (GER) \(\gamma\) is defined as the ratio of the displacement of the middle point of the suspended slot waveguide inner beam (which is the most lose point in motion) when the MMA is applied in the \(x\) direction to the displacement of the same middle point of the inner beam when the gravitational force is applied in the direction of interest (taken in the \(x\) and \(y\) directions):
where \({\gamma }_{xx}\) and \({\gamma }_{xy}\) are the gravitational extinction ratios along the respective \(x\) and \(y\) directions. These ratios tell how much the sensor is resistant to the gravitational forces applied along the \(x\) and \(y\) directions. \(\Delta {x}_{m}\) is the shift in the suspended slot waveguide middle beam point along the \(x\) direction when the MMA is applied. \(\Delta {x}_{g}\) and \(\Delta {y}_{g}\) are the shifts in the suspended slot waveguide middle beam point when the gravitational force is applied in the respective \(x\) and \(y\) directions. The simulation of \({\gamma }_{xx}\) and \({\gamma }_{xy}\) is depicted in Fig. 10 taken for the range of \({a}_{m}\) from \(1 to {10}^{5}\,{\text{ms}}^{-2}\). The following conclusions may be drawn from this figure: (1) The sensor is more sensitive to the gravitational force along the \(x\) direction than the \(y\) direction (\({\gamma }_{xx}<{\gamma }_{xy}\)) because the depth of the beam is larger than its width (\(h>{W}_{gs}\)), (2) At the value \({a}_{m}=g\) the gravitational extinction ratio in the \(x\) direction is unity (\({\gamma }_{xx}=0\) dB). The sensor becomes more sensitive to the gravitational force when decreasing the design \({a}_{m}\) below \(g\), and (3) For the design \({a}_{m}\) values larger than about \({10}^{2}\,{\text{ms}}^{-2}\), the gravitational extinction ratio in the \(x\) direction is greater than 20 dB and therefore the sensor may be considered to be sufficiently rigid not to be affected by the gravitational force in the NAF operation.

Gravitational extinction ratios \({\gamma }_{xx}\) and \({\gamma }_{xy}\) along the respective \(x\) and \(y\) axes versus the design MMA in the NAF operation \({a}_{m}\) for LWLSs (\(m=363\) fg)
3.3 Turbo-force open-loop voltage operation mode
This section studies and compares the performance of the sensor in the common-mode voltage operation with that of the NAF operation. It was found since [106] that the application of an equal voltage to the sensor two electrodes setting \({V}_{c}={V}_{1}={V}_{2}\) and \({V}_{d}=0\) results in applying the same electrostatic actuation force to the inner beams of the two suspended slot waveguides of one differential phase shift section at quiescence, but then when an inertial actuation force is applied in the \(\pm x\) directions the imbalance in the electrostatic actuation force pulls further the suspension system in the motion direction. This introduces the turbo electrostatic force effect enhancing the optical sensitivity of the sensor in the motion direction. The full name of the operation mode in this case of applying a pure common-mode voltage is referred to as the turbo electrostatic force open-loop common-mode voltage (TEFOCV) control mode. There is a limit for the applied common-mode voltage referred to as \({V}_{cm}\) which represents the maximum critical voltage after which any minimal increase in \({V}_{c}\) may subject the Si beams of the suspended slot waveguides to the pull-in effect. In the pull-in effect, the electrostatic actuation force between the suspended slot waveguide beams may grow strong enough to cause structural damage and permanent bonding of the beams. Regardless of the design values of the \(\zeta\) and \({a}_{m}\) parameters at the NAF state the ICOEMS characteristics are uniquely controlled in unison by the normalized common-mode voltage \({V}_{cn}={V}_{c}/{V}_{cm}\). The simulation of the sensor characteristics including \({a}_{m}\), \({f}_{n}\), \(k\), \({S}_{ms}\), \({S}_{op}\), and \({x}_{c}\) are depicted in Fig. 11 as functions of \({V}_{cn}\). The parameter \({x}_{c}\) represents the displacement in the middle point of the suspended slot waveguide inner beam indicating the steadiness of the sensor. In this figure, the simulated parameters are normalized to their values obtained at the application of reset voltages for the generality of the results. For example the simulated full-scale deflection acceleration \({a}_{m}\) is normalized to \({a}_{m0}\) where the latter is the MMA value obtained when applying \({V}_{c}=0\). The normalization concepts of the different parameters are indicated in the figure for clarity. The following conclusions may be drawn from the simulated results of Fig. 11: (1) Increasing \({V}_{cn}\) to the maximum value of unity has the effect of decreasing the relative MMA \({a}_{m}/{a}_{m0}\) (\({a}_{m0}\) is the NAF value) to about \(0.03\), decreasing the relative resonant frequency \({f}_{n}/{f}_{n,max}\) (\({f}_{n,max}\) is the NAF value) to about \(0.23\), and increasing the relative optical sensitivity \({S}_{op}/{S}_{op,min}\) (\({S}_{op,min}\) is the NAF value) to about \(34.1\), (2) The dynamic range for controlling \({a}_{m}\) and \({S}_{op}\) is about 30.6 dB, and (3) The optical sensitivity of a sensor designed for \({a}_{m}=1\,{\text{ms}}^{-2}\) at NAF operation can be controlled in the TEFOCV operation mode within the range of about \(981\,{\text{to}}\, 33.5\times {10}^{3} \%g\) (\(0.981\,{\text{to}}\,33.5 su\)). Table 4 lists \({a}_{m}\), \({S}_{op}\), and \({f}_{n}\) at the \({V}_{cn}\) values of 0 and 1 taken for different design MMA values in the NAF operation.

ICOEMS acoustic sensor characteristics (\({a}_{m}\), \({f}_{n}\), \(k\), \({S}_{ms}\), \({S}_{op}\), and \({x}_{c}\)) relative to their values at reset voltages as functions of \({V}_{cn}\)
The dynamic range for controlling \({a}_{m}\) and \({S}_{op}\) in the TEFOCV mode is further explained in the simulations of Fig. 12 taken for the design MMA range from \(1 to {10}^{5}\,{\text{ms}}^{-2}\) in the NAF operation. The simulations in this figure are agnostic to the value of \(\zeta\) taken in design. The dynamic control regions are shown in yellow between the blue lines corresponding to the NAF state (\({V}_{c}=0\)) and the red lines corresponding to the critical application of \({V}_{c}={V}_{cm}\).

Dynamic range for controlling \({a}_{m}\) and \({S}_{op}\) in the TEFOCV mode versus the design MMA in the NAF operation \({a}_{m}\)
The dynamic ranges for controlling the other characteristics of the acoustic sensor including \({f}_{n}\), \(k\), \({S}_{ms}\), \({V}_{cm}\), and \({x}_{c}\) are shown in the simulations of Figs. 13 and 14 taken for the design MMA range from \(1 to {10}^{5}\,{\text{ms}}^{-2}\) in the NAF operation and taking \(N\) as a parameter. These simulations are shown for both the LWLS and HWLS for comparison. The simulations clarify that an LWLS always has a larger \({f}_{n}\), smaller \(k\), smaller \({S}_{ms}\), smaller \({V}_{cm}\), and smaller \({x}_{c}\) values compared to an HWLS designed for the same MMA in the NAF operation. This confirms that the LWLS is wider in bandwidth response and more resilient than an analogous HWLS but it requires smaller voltages to operate in the TEFOCV mode. Taking for example a highly sensitive sensor designed for \({a}_{m}=1\,{\text{ms}}^{-2}\) at NAF operation and \(N=64\), the value of \({V}_{cm}\) is about \(0.148 V\) for an LWLS and about \(6.62 V\) for an analogous HWLS. This example shows that the risk of keeping \({V}_{c}\) below \({V}_{cm}\) for a highly sensitive LWLS is more serious in application than that required for an analogous HWLS. However, taking the contrary example of a US sensor designed for \({a}_{m}={10}^{5}\,{\text{ms}}^{-2}\) at NAF operation and \(N=64\), the value of \({V}_{cm}\) is about \(15.4 V\) for an LWLS and about \(307.6 V\) for an analogous HWLS. This case indicates that the operation common-mode voltage range for an ultrasonic LWSL is much more reasonable in application than that required for an analogous HWLS. Expectedly, the high common-mode voltage required for the operation of an HWLS US sensor operating close to the MHz range raises more risk of a high potential gradient between the chip electrodes. US sensors operating at low voltages are also safer from the bio perspective to patients, especially for US endoscopic and laparoscopic procedures. In conclusion, the requirement of smaller common-mode voltages for US applications is an important advantage of LWLSs compared to HWLSs knowing that the TEFOCV mode is the mechanism used in steering the motion-sensing beam of multispoke sensors. Table 5 lists the \({V}_{cm}\) values for \(N=64\) required for different design MMA values in the NAF operation taken for both an LWLS and HWLS for comparison.

ICOEMS acoustic sensor characteristics of \({f}_{n}\) (up), \(k\) (middle), and \({S}_{ms}\) (down) for LWLSs (left, \(m=363\) fg) and HWLSs (right, \(\zeta =10\)) versus the design MMA in the NAF operation \({a}_{m}\)

ICOEMS acoustic sensor characteristics of \({V}_{cm}\) (up) and \({x}_{c}\) (down) for LWLSs (left, \(m=363\) fg) and HWLSs (right, \(\zeta =10\)) versus the design MMA in the NAF operation \({a}_{m}\)
Albeit the characteristics are nonlinear functions of the common-mode voltage in the TEFOCV mode following the square law as seen in Fig. 11, the phase detection characteristic of the studied ICOEMS sensor for a constant \({V}_{c}\) is a linear function of acceleration as in Fig. 15. The simulation in this figure is agnostic to the design \(\zeta\) value. Also noticeably all demonstrated characteristics of the sensor are linear functions of the design MMA in the NAF operation as in Figs. 6, 9, 10, 12, 13, and 14. This eases extending the predictions outside the investigated acceleration range from \(1 \mathrm{to} {10}^{5}\,{\text{ms}}^{-2}\).

Linear phase detection characteristics of the ICOEMS acoustic sensor in the TEFOCV operation mode
3.4 Zero-force closed-loop voltage operation mode
This section studies the sensor operation in the traditional negative feedback closed-loop voltage control mode which intends to stabilize the vibration of the suspension system (and the seismic mass in HWLSs) at the quiescence position with zero gain phase factor. The full name of this operation mode is referred to as the zero electrostatic force closed-loop feedback voltage (ZEFCFV) control mode. The control algorithm in this mode strictly maintains \({\Delta \phi }_{t}=0^\circ\) for all applied accelerations which is the condition referred to as the zero gain phase factor. The feedback applied by the electrode voltages \({V}_{1}\) and \({V}_{2}\) attempts to provide a differential electrostatic actuation force that resists the motion of the suspension system in the acceleration direction. As was demonstrated in [106] this operation mode results in widely extending the MMA range beyond the value obtained in the NAF operation and it lowers the optical sensitivity. The extended MMA range is referred to as \({a}_{mf}\) in the ZEFCFV mode. The operation of the sensor in this mode is explained in Fig. 16. The simulations in this figure are taken for LWLSs (left) and HWLSs (right) designed for MMA values in the NAF operation of \(1\,{\text{ms}}^{-2}\) (top) and \({10}^{5}\,{\text{ms}}^{-2}\) (down) for comparison. The figure depicts the voltages \({V}_{1}\), \({V}_{2}\), \({V}_{c}\), and \({V}_{d}\) applied to hold the suspension system close to the quiescence position and maintain the zero gain phase factor condition. Three different algorithm variants of this mode are demonstrated in the figure although there are an unlimited number of other possibilities. The characteristics of the continued-line curves are based on keeping \({V}_{1}=0\) for \(a>0\) and \({V}_{2}=0\) for \(a<0\). The characteristics of the dashed-line curves are based on keeping \({V}_{c}={V}_{cm}/2\). The characteristics of the dotted-line curves are based on maintaining \({V}_{c}=0.75{V}_{cm}\) at the best effort until either \({V}_{1}\) or \({V}_{2}\) reaches \({V}_{cm}\). In all voltage control cases \({V}_{1}\) and \({V}_{2}\) cannot exceed the maximum pull-in effect limit of \({V}_{cm}\). The following conclusions may be drawn from these simulations: (1) For the design \({a}_{m}=1\,{\text{ms}}^{-2}\) value, the \({a}_{mf}\) value is about \(11\times {10}^{3}\,{\text{ms}}^{-2}\) for the LWLS and about \(1.66\times {10}^{3}\,{\text{ms}}^{-2}\) for the HWLS. In this case, the extended MMA range of the LWLS is about \(6.61\) times larger than that of the analogous HWLS, (2) For the design \({a}_{m}={10}^{5}\,{\text{ms}}^{-2}\) value, the \({a}_{mf}\) value is about \({10}^{8}\,{\text{ms}}^{-2}\) for the LWLS and about \(22.4\times {10}^{6}\,{\text{ms}}^{-2}\) for the HWLS. In this case, the extended MMA range of the LWLS is about \(4.47\) times larger than that of the analogous HWLS, and (3) The voltage detection characteristic when taking the algorithm option of setting \({V}_{c}={V}_{cm}/2\) is optimally linear within the measurable acceleration range of \(0 to {a}_{mf}\).

Control algorithms in the ZEFCFV operation mode for MMA values in the NAF operation of supersensitive \({a}_{m}=1\,{\text{ms}}^{-2}\) (up) and ultrasonic \({{a}_{m}=10}^{5}\,{\text{ms}}^{-2}\) (down) taken for LWLSs (left) and HWLSs (right)
It is serious to notice that the LWLS designed at \({a}_{m}={10}^{5}\,{\text{ms}}^{-2}\) can withstand measuring immense accelerations in the ZEFCFV mode up to \({10}^{8}\,{\text{ms}}^{-2}\) which may be reached for example when an object accelerates to one-third the light speed in a second. The expansion in the MMA range (\({a}_{mf}\)) in the ZEFCFV mode as a function of the design MMA in the NAF mode (\({a}_{m}\)) is depicted in Fig. 17 for both the LWLS and HWLS. Again this characteristic is a linear function of acceleration. Table 6 lists the numeric values of \({a}_{mf}\) and \({S}_{op}\) in the ZEFCFV mode for different design \({a}_{m}\) values. The table also indicates the combined TEFOCV and ZEFCFV dynamic range \(DR\) for controlling \({a}_{m}\) and \({S}_{op}\).

MMA in the ZEFCFV operation mode \({a}_{mf}\) as a function of the design MMA in the NAF operation \({a}_{m}\) for both the LWLS and HWLS
3.5 Dynamic turbo-force closed-loop voltage operation mode
This section introduces a new operation mode referred to as the dynamic turbo electrostatic force closed-loop feedback voltage (DTFCFV) control mode. The previously studied NAF, TEFOCV, and ZEFCFV modes represent single-factor measurement algorithms. The NAF and TEFOCV modes rely on relating the measurement phase of the light to the modulating acceleration. The ZEFCFV mode relies on holding the measurement phase error of the light close to zero and it relates the stabilizing feedback voltages to the measured acceleration. In application, each of these operation modes has its merits and demerits. The NAF mode corresponds to the natural response of the sensor at reset voltages. It is better stable than the TEFOCV mode avoiding the risk of the pull-in effect and it provides optical sensitivity higher than that of the ZEFCFV mode. The TEFOCV mode introduces the turbo electrostatic force effect enabling magnificently increasing the optical sensitivity beyond the NAF mode limits. The tuning capability of the optical sensitivity of this mode is important and utilized in this study to support the steering of the motion-sensing beam. However, the TEFOCV mode requires careful handling of the applied common-mode voltage to avoid the catastrophic pull-in effect instability. The ZEFCFV is the most stable operation mode. It results in extremely widening the MMA range of the sensor. However, the optical sensitivity is reduced to a small fixed value in this mode. It is also worth indicating that this mode results in broadening the frequency response of the sensor as demonstrated in this section. The combined dynamic range values for controlling \({a}_{m}\) and \({S}_{op}\) listed in Table 6 sound great but they correspond to a discontinued range when switching between the TEFOCV and ZEFCFV modes.
The DTFCFV mode is a multifactor measurement algorithm providing a continuous dynamic range control of \({S}_{op}\). The DTFCFV mode is also based on closed-loop control providing stable operation over the same extended acceleration measurement range of the ZEFCFV mode of \({a}_{mf}\). In a multifactor measurement algorithm the detection phase \({\Delta \phi }_{t}\) is allowed to be a function of the normalized feedback difference voltage \({V}_{dn}={V}_{d}/{V}_{cm}\):
A simple generalization of Eq. (8) aiming to provide a wide linear dynamic range for controlling \(S_{op}\) may be given by:
where \(\rho\) is the gain phase factor. Equation (9) represents a variable gain phase factor algorithm contrary to the zero gain phase factor principle used in the ZEFCFV mode. In the DTFCFV mode, the common-mode voltage is optimally adjusted at the value \({V}_{c}={V}_{cm}/2\) and \({V}_{d}\) is applied in the closed-loop mode to stabilize the suspension system at close distances around the quiescence position satisfying the variable gain phase factor condition of Eq. (9). To understand the operation principle of this mode one should recognize that Eq. (9) is tailored to linearly relate \(\Delta {\phi }_{t}\) to \({V}_{d}\) which is a linear function of acceleration in the closed-loop operation. In result \(\Delta {\phi }_{t}\) can correspond linearly to the increase in acceleration for a wide range of \(\rho\) values. Reaching the \(\pm \pi /2\) full-scale deflection blinding limits of \(\Delta {\phi }_{t}\) depends on the \(\rho\) value. This effect tunes the MMA range of the \(\Delta {\phi }_{t}\) acceleration measurement factor and correspondingly adjusts \({S}_{op}\) as a function of \(\rho\). The role of \(\rho\) to control \({S}_{op}\) resembles the function of the range selector switch in a voltmeter. In the DTFCFV mode both \(\Delta {\phi }_{t}\) and \({V}_{d}\) are functions of the applied acceleration. The \({V}_{d}\) acceleration measurement factor provides the same \({S}_{op}\) and \({a}_{mf}\) values of the ZEFCFV mode. The \(\Delta {\phi }_{t}\) measurement factor provides a wide dynamic range for controlling \({S}_{op}\). The acceleration measurement may be based on either one or both of the \(\Delta {\phi }_{t}\) and \({V}_{d}\) factors. Using the \({V}_{d}\) measurement factor alone resembles the ZEFCFV operation with no advantage of controlling \({S}_{op}\). Using the \(\Delta {\phi }_{t}\) measurement factor alone advantage in controlling \({S}_{op}\) but the MMA range becomes smaller than \({a}_{mf}\) when \(\left|\rho \right|>1\). Using both of the \(\Delta {\phi }_{t}\) and \({V}_{d}\) measurement factors combine both advantages of extending the MMA range to \({a}_{mf}\) and tuning \({S}_{op}\) to the desired value. In this case \({V}_{d}\) is divided into subranges within which \(\Delta {\phi }_{t}\) may vary within the \(\pm \pi /2\) full-scale deflection blinding limits. As a result, the DTFCFV mode provides better measurement accuracy compared to the previously studied modes when both of the \(\Delta {\phi }_{t}\) and \({V}_{d}\) measurement factors are utilized.
The voltage detection characteristics in the DTFCFV mode are almost similar to those in Fig. 16. The phase detection characteristics in this mode are depicted in Fig. 18 for an LWLS (left) and HWLS (right) designed for an MMA of \(1\,{\text{ms}}^{-2}\) in the NAF operation. Some discrete \(\rho\) values within the range of \(-100 to 100\) are taken in the simulations. The following conclusions may be drawn from the simulations: (1) As for the ZEFCFV mode, the DTFCFV mode extends \({a}_{mf}\) for the design MMA of \(1\,{\text{ms}}^{-2}\) in the NAF operation for up to \(11\times {10}^{3}\,{\text{ms}}^{-2}\) for the LWLS and \(1.66\times {10}^{3}\,{\text{ms}}^{-2}\) for the HWLS, (2) Based on using the \({V}_{d}\) measurement factor the \({a}_{mf}\) and \({S}_{op}\) values are as those in Fig. 17 and Tale 6 and \({S}_{op}\) is independent of \(\rho\), (3) The \(\Delta {\phi }_{t}\) characteristic is a linear function of acceleration and its slope which corresponds to \({S}_{op}\) is controlled by \(\rho\), (4) At \(\rho =0\) the optical sensitivity based on the \(\Delta {\phi }_{t}\) measurement factor is zero and the operation of the sensor turns into the ZEFCFV mode. Therefore, the ZEFCFV is a sub-mode of the DTFCFV mode and the DTFCFV mode is a generalization of the ZEFCFV mode, (5) For \(0<\left|\rho \right|<1\) the optical sensitivity based on the \(\Delta {\phi }_{t}\) measurement factor is less than that obtained for the ZEFCFV mode, (6) At \(\left|\rho \right|=1\) the optical sensitivities based on the \(\Delta {\phi }_{t}\) and \({V}_{d}\) measurement factors are equal, and (7) For \(\left|\rho \right|>1\) the optical sensitivity based on the \(\Delta {\phi }_{t}\) measurement factor is larger than that for the ZEFCFV mode. The optical sensitivity based on the \(\Delta {\phi }_{t}\) measurement factor for \(\rho >0\) may be determined from:

Phase detection characteristics in the DTFCFV operation mode for the LWLS (left) and HWLS (right) taking the gain phase factor \(\rho\) as a parameter. The design MMA in the NAF operation and the number of cascaded sections are taken as \({a}_{m}=1\,{\text{ms}}^{-2}\) and \(N=64\), respectively, in the simulations
The simulation of \({S}_{op}\) and \({f}_{n}\) for a wide \(\rho\) range of \(1 to {10}^{6}\) is depicted in Fig. 19 for both the LWLS and HWLS for comparison taking the design MMA in the NAF operation as a parameter and taking \(N=64\). The following conclusions may be drawn from these simulations: (1) \({S}_{op}\) increases linearly for a wide range of increasing \(\rho\) before it reaches saturation, (2) \({f}_{n}\) stays broad for a wide range of \(\rho\) values before it starts decreasing with the increase in \(\rho\), (3) The LWLS controls \({S}_{op}\) linearly for a wider range of \(\rho\) values compared to an analogous HWLS, and (4) The LWLS has a broader frequency response for a wider range of \(\rho\) values compared to an analogous HWLS.

Optical sensitivity \({S}_{op}\) (left) and resonant frequency \({f}_{n}\) (right) as functions of the gain phase factor \(\rho\) in the DTFCFV operation mode taking the design MMA in the NAF operation \({a}_{m}\) as a parameter. The continued-line and dotted-line curves correspond to the respective LWLS and HWLS. The number of cascaded sections is taken as \(N=64\) in the simulations
Table 7 lists the saturation (maximum) optical sensitivity \({S}_{op,max}\) and the maximum and minimum resonant frequencies \({f}_{n,max}\) and \({f}_{n,min}\) in the DTFCFV mode taken for different design MMA values in the NAF mode and taken for the LWLS and HWLS for comparison. From the results in this table, it can be noticed that \({S}_{op}\) based on the \(\Delta {\phi }_{t}\) measurement factor can be tuned from zero to more than about \(2.4\) times the value obtained in the NAF mode. The MMA range \({a}_{mf}\), as the case for the ZEFCFV mode, is increased in the DTFCFV mode by a factor of more than \({10}^{3}\) as in Table 6. The operation speed of the LWLS designed at an MMA value of \({10}^{5}\,{\text{ms}}^{-2}\) in the NAF mode can reach a value of 11 MHz in the DTFCFV and ZEFCFV modes. Higher US operation frequencies may be reached by designing for MMA values in the NAF mode higher than \({10}^{5}\,{\text{ms}}^{-2}\). For example the design for an MMA of \({10}^{6}\,{\text{ms}}^{-2}\) in the NAF mode would allow increasing the operation frequency to above 27.7 MHz in the DTFCFV and ZEFCFV modes.
3.6 Deformation of the suspended silicon beams
This section studies the deformation of the Si beams of the suspended slot waveguides. Deformation examples of LWLSs and HWLSs designed for an MMA value of \(100\,{\text{ms}}^{-2}\) in the NAF operation are compared in this section to illustrate the operation of the acoustic transducer in the different modes. The LWLS has a suspended slot waveguide length of about \({L}_{s}=81.86\) μm and the weight of its lightweight seismic mass is \(363\) fg. The HWLS has a suspended slot waveguide length of about \({L}_{s}=14.34\) μm and the weight of its seismic mass for \(\zeta =10\) is about 14.37 ng. The deformation in the Si beam can be demonstrated by simulating its excursion width \({W}_{ex}\) along its relative length on the \(z\)-axis from \(0\) to \(z/{L}_{s}\). \({W}_{ex}\left(z\right)\) represents the lateral shift of the Si beam in the horizontal \(x\)-direction (see Fig. 2) at point \(z\) along its length. Relative deformation graphs are also used in this study to further explain the deformations of the suspended slot waveguide beams. The relative deformation is obtained by normalizing \({W}_{ex}\) to the maximum excursion width \({W}_{ex,max}\) incurred in the four Si beams of one differential phase shift section due to the applied acceleration. The relative deformation lines of the suspended slot waveguide beams of one differential phase shift section are separated from each other in the logical order of \(1a\), \(1b\), \(2b\), and \(2a\) from top to bottom to envision the sensor behavior in the applied mode.
Figure 20 depicts the sensor response in the NAF operation mode. In this figure an acceleration of \(a={a}_{m}=100\,{\text{ms}}^{-2}\) is applied at reset voltages \({V}_{1}={V}_{2}=0\). In the upper part of the figure which simulates the deformations of the suspended Si beams of one differential phase shift section of the LWLS, it seems that the four suspended Si beams are deformed in the applied acceleration direction under the inertial actuation force effect of their distributed masses. However, the symmetrical deformation of the inner suspended Si beams \(1b\) and \(2b\) is greater than that of the outer suspended Si beams \(1a\) and \(2a\) because the middle points of the outer suspended Si beams are restricted from motion whereas those of the inner suspended Si beams swing free together. In the NAF operation of the LWLS, each of the inner and outer suspended Si beams dances in coherence with the applied acoustic vibration but the pace at which the inner beams move is larger than that of the outer beams. This effectively modulates the gap widths of the top and bottom suspended slot waveguides resulting in modulating the light phase accordingly. In the lower part of Fig. 20 which simulates the HWLS the deformation of the outer suspended Si beams under their distributed mass inertial actuation force effect is negligible compared to the deformation of the inner suspended Si beams under the main inertial actuation force effect of the heavy seismic mass. The suspended Si beams of the LWLS are longer than those of the analogous HWLS so they needed to deform to about \({W}_{ex,max}=37.9 pm\) which is less than that needed for the HWLS of about \({W}_{ex,max}=216.2 pm\) to achieve the same \(\Delta {\phi }_{t}=90^\circ\) taken for \(N=64\).

Deformations of the four suspended Si beams of one cascaded differential phase shift section based on fixed boundary conditions taken for an LWLS (up) and HWLS (down). NAF operation mode: MMA in the NAF operation is applied. Design MMA in the NAF operation is \({a}_{m}=100\,{\text{ms}}^{-2}\), applied acceleration is \(a=100\,{\text{ms}}^{-2}\), reset voltages of \({V}_{1}={V}_{2}=0\) is applied, and \(N=64\) is taken. LWLS parameters: \({L}_{s}=81.86\) μm and \(m=363\) fg. HWLS parameters: \({L}_{s}=14.34\) μm and \(m=14.37\) ng. Note: The relative beam deformation is the normalization of the excursion to the maximum excursion induced due to the applied acceleration
The behavior of the acoustic transducer in the TEFOCV mode is illustrated in Fig. 21. The kissing-lips shape of the excursion widths formed in this case is due to the application of the maximum common-mode voltage \({V}_{c}={V}_{cm}\) with zero difference voltage \({V}_{d}=0\). The outer and inner beams of each suspended slot waveguide are stressed by the distributed attraction electrostatic actuation force applied between them getting the differential phase shift sensor section ready to pick up accelerations much smaller than the MMA in the NAF operation mode. In the simulation the application of the full-scale deflection acceleration of \(a=2.933\,{\text{ms}}^{-2}\) induced imbalance in the deformation of the upper and lower suspended slot waveguides of one differential phase shift section enough to achieve \(\Delta {\phi }_{t}=90^\circ\) for \(N=64\) sections (The center points of the inner suspended Si beams are moved by about \(21 pm\) distance in the motion direction). Albeit the lengths of the suspended slot waveguides of the simulated LWLS and HWLS are different the relative deformations of their suspended Si beams in this mode are almost symmetrical. In conclusion, the suspended Si beams of an analogous LWLS and HWLS in the TEFOCV mode always rhythm at the same pace in response to an actuating acoustic wave.

Deformations of the four suspended Si beams of one cascaded differential phase shift section based on fixed boundary conditions taken for an LWLS (up) and HWLS (down). TEFOCV operation mode: MMA at maximum common mode voltage (\({V}_{c}={V}_{cm}\) and \({V}_{d}=0\)) is applied. Design MMA in the NAF operation is \({a}_{m}=100\,{\text{ms}}^{-2}\), applied acceleration is \(a=2.933\,{\text{ms}}^{-2}\), common mode voltage of \({V}_{1}={V}_{2}={V}_{c}\) is applied, and \(N=64\) is taken. LWLS parameters: \({L}_{s}=81.86\) μm, \(m=363\) fg, and \({V}_{c}=0.943132 V\). HWLS parameters: \({L}_{s}=14.34\) μm, \(m=14.37\) ng, and \({V}_{c}=30.7159 V\). Note: The relative beam deformation is the normalization of the excursion to the maximum excursion induced due to the applied acceleration
The acoustic sensor behavior in the ZEFCFV mode (and similarly in the DTFCFV mode) is demonstrated in Fig. 22. In this simulation the extended MMA \(a={a}_{mf}\) is applied requiring the application of almost \({V}_{c}={V}_{cm}/2\) and \({V}_{d}=-{V}_{cm}\) or equivalently \({V}_{1}=0\) and \({V}_{2}={V}_{cm}\). The distributed electrostatic actuation force between the beams of the lower suspended slot waveguide struggles to keep the center points of the inner suspended Si beams and the attached lightweight or heavyweight seismic mass of the respective LWLS and HWLS at close distances from the quiescence position such that \(\Delta {\phi }_{t}=0^\circ\) for the ZEFCFV mode. In the figure, the center points of the inner suspended Si beams are shifted by only about \(24.9\) nm for the LWLS and about 24.7 nm for the HWLS at the applied respective intense \({a}_{mf}\) accelerations of \(436515.8\,{\text{ms}}^{-2}\) and \(75857.8\,{\text{ms}}^{-2}\).

Deformations of the four suspended Si beams of one cascaded differential phase shift section based on fixed boundary conditions taken for an LWLS (up) and HWLS (down). ZEFCFV operation mode: MMA of \({a=a}_{mf}\) at \({V}_{d}=-{V}_{cm}\) and \({V}_{c}={V}_{cm}/2\) is applied. Design MMA in the NAF operation of \({a}_{m}=100\,{\text{ms}}^{-2}\) and \(N=64\) are taken. LWLS parameters:\({L}_{s}=81.86\) μm, \(m=363\) fg, \(a=436515.8\,{\text{ms}}^{-2}\), \({V}_{1}=0.0060528 V\), and \({V}_{2}=0.937079 V\). HWLS parameters: \({L}_{s}=14.34\) μm, \(m=14.37\) ng, \(a=75857.8\,{\text{ms}}^{-2}\),\({V}_{1}=0.301585 V\), and\({V}_{2}=30.4143 V\). Note: The relative beam deformation is the normalization of the excursion to the maximum excursion induced due to the applied acceleration
It should be noted that all parameters used in the numerical simulations including the lengths, accelerations, and voltages are determined in high-accuracy figures but then they are rounded in the reported study. So care is needed when attempting to reproduce the results to avoid the pull-in effect.
3.7 Directional acoustic motion-wave sensing
This section studies the directional MWS properties of the acoustic LWLS. The principle of remote distance-vector MWS is explained requiring the use of steerable acoustic MWS units. Steering of the MWS beam utilizing multispoke sensor architectures is demonstrated. Studying the steerable directional properties of acoustic bio-signal sensors is of great importance in human–machine interface applications [157] including US tomography.
3.7.1 Directional properties of the single-spoke sensor
The photonic circuit of Fig. 5 in Sect. 2 represents the architecture of the basic single-spoke acoustic sensor. In the single-spoke acoustic sensor, the suspended Si beams of all cascaded differential phase shift sections of the MZI transducer are aligned together in one MWS direction. Additionally, all of the cascaded differential phase shift sections are biased by common electrodes to control their MWS sensitivity equally. This results in the voltage-tunable unidirectional MWS nature of the single-spoke acoustic sensor. The single-spoke acoustic sensor architecture provides no steering capability of its motion-wave sensing beam in any plane so it is conveniently characterized as a single-spoke zero-dimension steering (1S0DS) sensor. The MWS directional properties of the 1S0DS sensor can be described by the normalized directivity function:
where \(d\) is the directivity function, \({d}_{n}=d/{d}_{p,min}\) is the normalized value of \(d\), \({d}_{p}\) is the peak value of \(d\) in the foreside direction of the motion-wave sensing beam, \({d}_{pn}\) is the normalized value of \({d}_{p}\), \({d}_{p,min}\) is the minimum value of \({d}_{p}\) at reset voltages, \({d}_{p,max}\) is the maximum value of \({d}_{p}\), \({\theta }_{H}\) is the directional angle in the horizontal azimuth plane of the sensor, and \({\theta }_{V}\) is the directional angle in the vertical elevation plane of the sensor. The directivity function of Eq. (11) may conveniently correspond to the directional optical sensitivity of the sensor which is controlled by the electrode voltages. In the TEFOCV mode \({d}_{pn}\) has a range of voltage-controlled values of about \(1 to 34.1\) as was indicated in Sect. 3.3. Figure 23 depicts the motion-wave sensing directivity pattern in both the azimuth and elevation planes of the 1S0DS sensor illustrated for different \({d}_{pn}\) values. In three-dimensional space, the single-spoke acoustic sensor has two motion-wave sensing beams indicating its natural behavior to feel the acoustic vibrations in the \(\pm x\) main-axis directions. The directivity \(D\) of an acoustic sensor is defined as the ratio of the peak value to the average value of the directivity function (\({d}_{p}/{d}_{av}\)). All single-unit sensors studied in this research have a constant directivity value of \(D=\pi /2\approx 1.57\) (\(\approx 1.96\) dB) in both the azimuth and elevation planes. This directivity corresponds to − 3 dB points beamwidth of the motion-wave sensing beam of \(120^\circ\).

Directivity function of the 1S0DS of Fig. 4 in the azimuth and elevation planes taken for different relative optical sensitivities as in the legend
3.7.2 Distance-vector deep directional sensing
In US imaging and deep/remote acoustic resonance sensing the distance and direction of the pixel from which the acoustic vibration emerges (either as echo or source resonance) and the direction to which the acoustic vibration is heading represent the geo-directional object/pixel identification information that may be used in processing image graphics. Different principles may be utilized in the geo-directional pixel identification technique such as the delay time spread of the reflected acoustic pulses, the Doppler shift effect of the acoustic echos, and the use of focused acoustic sensing. The distance-vector deep sensing tackles the geo-directional pixel identification utilizing focused acoustic sensing. The distance-vector deep sensing principle relies on using multiple independent steerable focused acoustic sensors. To achieve the geo-directional pixel identification in three-dimensional (3D) space three independent steerable focused acoustic sensors each providing 3D steering capability of its motion-wave sensing beam are needed. The sensors studied in this research support only 2D distance-vector deep/remote sensing due to the limitation of the used integration template. 3D geo-directional pixel identification using multiple 2D distance-vector deep sensing units requires motorized steering (tilting or rotation) of the electronically steerable sensors. The principle of operation of the 2D distance-vector deep sensing is illustrated in Fig. 24. Two independent steerable focused acoustic sensors are placed apart at a distance \({d}_{12}\) from each other. Depending on the steering capability of each independent sensor unit they may be tilted inside toward each other by an angle \({\theta }_{1}={\theta }_{2}\) to cover the desired scanning depth. The electronic steering angles \({\theta }_{s1}\) and \({\theta }_{s2}\) of the focused MWS beams of the two independent acoustic sensors with the distance \({d}_{12}\) and tilt angles \({\theta }_{1}\) and \({\theta }_{2}\) geometrically determine the deep location of the detected pixel in terms of the depth \({d}_{v}\) and horizontal shift \({d}_{h}\). The magnitude \(u\) and orientation \({\theta }_{u}\) of the pixel resonant echo is determined by the \({u}_{1}\) and \({u}_{2}\) echo components measured in the foreside directions of the MWS beams of the respective independent acoustic sensors. At detection digital signal processing is needed to compensate for the delay time spread difference of the measured echo components due to the difference in the propagation path lengths \({d}_{1}\) and \({d}_{2}\). The distance-vector deep sensing can be combined with other principles such as the delay time spread of the MWS beam of each sensor unit utilizing the benefits of multifactor measurement to enhance the scanning accuracy and speed. The illustrated distance-vector deep sensing principle assumes the measurement medium matter to be ideally homogeneous. This assumption can be true in some applications when for example in a counter-unmanned aircraft system the distance-vector remote sensing principle can be applied to provide secure passive detection and tracking of a propeller drone flying at a low sub-Mach speed identified by its audible buzzing signature. However, in US imaging the complication of the propagation impairments of the scanned human body requires advanced intelligent processing. The next two sections introduce 2D steerable focused acoustic sensors of two different multispoke architectures supporting different steering capabilities.

Distance-vector deep sensing in two dimensions utilizing two independent steerable focused acoustic sensors
3.7.3 Two-spoke two-dimension steerable acoustic sensor
In contrast to the single-spoke acoustic sensor which has a non-steerable motion-wave sensing directivity pattern, multiple-spoke acoustic sensors provide steering of the motion-wave sensing beam in a 2D plane. The supported steering range of the MWS beam depends on the multiple-spoke acoustic sensor type. This section presents the two-spoke two-dimension steering (2S2DS) sensor shown in Fig. 25. The 2S2DS sensor has two MWS groups of differential phase shift cascaded sections in the core MZI transducer referred to as spokes \(A\) and \(B\). The MWS foreside directions \({u}_{A}\) and \({u}_{B}\) of spokes \(A\) and \(B\), respectively, are separated by an angle \({\theta }_{AB}\). The differential phase shift cascaded sections of each spoke are biased by isolated electrodes to control their optical sensitivity in the TEFOCV mode separately. Tunning the optical sensitivities of spokes \(A\) and \(B\) steers the MWS beam between the \({u}_{A}\) and \({u}_{B}\) directions. When \({\theta }_{AB}=0^\circ\) the sensing directions \({u}_{A}\) and \({u}_{B}\) are aligned together and the architecture becomes similar to the 1S0DS sensor but with two electrically isolated spokes. When \({\theta }_{AB}=180^\circ\), the sensing directions \({u}_{A}\) and \({u}_{B}\) reverses each other resulting in an architecture referred to as a differential two-spoke single-dimension steering (2S1DS) sensor. The differential 2S1DS sensor enables controlling the optical sensitivity along the opposing \({u}_{A}\) and \({u}_{B}\) directions such that it can reverse the motion-sensing direction and it can bring the optical sensitivity down to zero when the optical sensitivities of spokes \(A\) and \(B\) are equal. When \(0^\circ {<\theta }_{AB}<120^\circ\) the optical sensitivity of the steered MWS beam is advantaged by being up-faded (the resultant optical sensitivity is higher than the maximum optical sensitivity of each spoke). When \(120^\circ {<\theta }_{AB}<180^\circ\) the steering range is enhanced but the optical sensitivity is disadvantaged by being down-faded (the resultant optical sensitivity is lower than the maximum optical sensitivity of each spoke). The best choice to avoid depriving the optical sensitivity and achieving a broad steering range of the MWS beam is when \({\theta }_{AB}=120^\circ\).

Two-spoke two-dimension limited range steerable acoustic sensor of lightweight loaded sections
The victory architecture of the 2S2DS sensor of Fig. 25 is tailored such that the lengths of the two arms of the MZI transducer are equal for zero delay time between them. The actual shape and location of the electrodes may be altered for safe adjustment of the potential gradient between the electrodes. In the analysis that follows spokes \(A\) and \(B\) are assumed to be identical. The directivity function of the 2S2DS sensor is given by:
where \({d}_{A}\) and \({d}_{B}\) are the voltage-controlled directivities of spokes \(A\) and \(B\), respectively, with conveniently corresponding the directivity of each spoke to its optical sensitivity. \({d}_{p,min}\) and \({d}_{p,max}\) are the minimum and maximum directivities of spokes \(A\) and \(B\). For steering the MWS beam in the azimuth plane (\(\theta_{V} = 0^\circ\)):
where \({d}_{s}\) is the directivity in the steering direction and \({\theta }_{s}\) is the steering angle as seen in the inset in Fig. 26. Based on the regime of Eq. (13) the resultant directivity can be controlled within the range:

Steering of the directivity function of the victory 2S2DS sensor of Fig. 25 in the azimuth plane. \({\theta }_{AB}=120^\circ\)
Taking \({\theta }_{AB}=120^\circ\) results in \({d}_{s,max}={d}_{p,max}\) so the maximum reachable directivity is not deprived. \({d}_{s}\) and \({\theta }_{s}\) are controlled by \({d}_{A}\) and \({d}_{B}\) in the TEFOCV mode. It is interesting in application to steer the MWS beam for a constant \({d}_{s}\) value. This condition for maintaining the directivity of the steered MWS beam is referred to as the constant continued-steering directivity regime. The steering width angle \(\Delta {\theta }_{s}\) is a function of \({d}_{s}\):
where \({\theta }_{s,min}\) and \({\theta }_{s,max}\) are the minimum and maximum steering angles for a constant continued \({d}_{s}\) value. At the singular points when \({d}_{s}\) equals to either \({d}_{s,min}\) or \({d}_{s,max}\) the steering width angle is zero (\(\Delta {\theta }_{s}=0^\circ\)) and the MWS beam is directed midway between the foreside sensing directions of spokes \(A\) and \(B\). The widest steering width angle for a constant continued-steering directivity control is achieved when \({d}_{s}={d}_{w}\):
For the studied sensors \({\theta }_{w0}\approx 91.68^\circ\) and therefore at the optimum design \(\left({\theta }_{AB}=120^\circ \right)>{\theta }_{w0}\). When steering for \({d}_{s}<{d}_{w}\) in the constant continued-steering directivity regime \(\Delta {\theta }_{s}\) is determined from:
When steering for \(d_{s} > d_{w}\) in the constant continued-steering directivity regime \(\Delta \theta_{s}\) is determined from:
For \({\theta }_{AB}=120^\circ\), \({d}_{wn}={d}_{w}/{d}_{p,min}\approx 29.53\). The widest steering width angle at \({d}_{sn}={d}_{s}/{d}_{p,min}={d}_{wn}\) is \(\Delta {\theta }_{s}\approx 116.64^\circ\). Figure 26 depicts the normalized directivity pattern \({d}_{n}=d/{d}_{p,min}\) in the azimuth plane steered between \({\theta }_{s,min}\) and \({\theta }_{s,max}\) in the constant continued-steering directivity regime taken for different \({d}_{sn}\) values within the full range of \(1 to 34.2\).
The deprivation of \(\Delta {\theta }_{s}\) when steering in the constant continued-steering directivity regime is depicted in Fig. 27 as a function of \({d}_{sn}\) taken for two different \({\theta }_{AB}\) values of \(90^\circ\) and \(120^\circ\). Choosing \({\theta }_{AB}=90^\circ\) enables reaching larger \({d}_{s}\) values but the spatial steering range becomes smaller than that for taking \({\theta }_{AB}=120^\circ\).

Steering width angle \(\Delta {\theta }_{s}\) of the directivity function of the victory 2S2DS sensor of Fig. 25 in the azimuth plane versus the normalized directivity/sensitivity \({d}_{sn}\) in the constant continued-steering directivity regime taken for two different \({\theta }_{AB}\) values as in the legend
The normalized common-mode voltages \({V}_{cn,A}={V}_{cA}/{V}_{cm}\) and \({V}_{cn,B}={V}_{cB}/{V}_{cm}\) applied to spokes \(A\) and \(B\), respectively, to steer the MWS beam in the constant continued-steering directivity regime are simulated in Fig. 28 as functions of the mid-range steering angle \({\theta }_{s,mid}={\theta }_{s}-{\theta }_{AB}/2\) taken for different \({d}_{s}\) values. In this figure when taking \({d}_{s}/{d}_{w}=1.05\to {d}_{s}>{d}_{w}\) the steering range of \({\theta }_{s,mid}\) for the constant \({d}_{s}\) becomes discontinued (the green lines). The widest steering results when taking \({d}_{s}={d}_{w}\) (the red lines). To resolve the deprivation issue of the steering width angle providing unlimited tuning capability of the sensitivity within its available control range in all directions in the azimuth plane multi-spoke architectures of orders higher than two must be used as demonstrated in the next section.

Electrodes common-mode voltages used in steering the directivity function of the victory 2S2DS sensor of Fig. 25 in the azimuth plane. \({\theta }_{AB}=120^\circ\)
3.7.4 Three-spoke two-dimension steerable acoustic sensor
The utilization of three spokes in the sensor architecture suffices to provide full steering coverage of the motion-wave sensing beam in the azimuth plane. Albeit the use of an order higher than three may enhance the steering mechanism by increasing the maximum reachable directional directivity it results in increasing the structure complexity. This section presents the three-spoke two-dimension steering (3S2DS) sensor of Fig. 29. The core MZI transducer of this sensor has three identical spokes (\(A\), \(B\), and \(C\)) made of cascaded differential phase shift MWS sections aligned on three different inclined axes. The MWS directions \({u}_{A}\), \({u}_{B}\), and \({u}_{C}\) of spokes \(A\), \(B\), and \(C\), respectively, are apart from each other by an equal \(120^\circ\) angle. Albeit the use of this angle is not a necessary condition to provide full steering coverage of the MWS beam it results in a uniform steering of \(360^\circ\) in the azimuth plane. The womb architecture in Fig. 29 is tailored for equal path lengths of the two arms of the MZI transducer. The directivity function of the 3S2DS sensor in the azimuth plane (\({\theta }_{V}=0^\circ \to cos{\theta }_{V}=1\)) is given by:
where \({d}_{A}\), \({d}_{B}\), and \({d}_{C}\) are the voltage-controlled directivities (also corresponding to the optical sensitivities) of spokes \(A\), \(B\), and \(C\), respectively. \({d}_{s}\) is the resultant directional directivity in the steering direction of the motion-wave sensing beam and \({\theta }_{s}\) is the steering angle as indicated in the inset in Fig. 29. According to Eq. (19) \({d}_{s}\) is controlled within the range of \(\langle {d}_{s,min},{d}_{s,max}\rangle\). \({d}_{s,min}=0\) is obtained whenever \({d}_{A}={d}_{B}={d}_{C}\), and \({d}_{s,max}={d}_{p,max}-{d}_{p,min}\) is obtained for example when setting both \({d}_{B}={d}_{C}={d}_{p,max}\) and \({d}_{A}={d}_{p,min}\). The maximum resultant directional directivity in the constant continued-steering directivity regime is \({d}_{w}=\left(\sqrt{3}/2\right){d}_{s,max}\). Albeit there are unlimited regimes to control the steering of the MWS beam a convenient algorithm is given in “Appendix 2”. For the studied sensors the maximum normalized directivity in the constant continued-steering directivity regime is \({d}_{wn}={d}_{w}/{d}_{p,min}\approx 28.67\) and the maximum reachable normalized directivity is \({d}_{sn,max}={d}_{s,max}/{d}_{p,min}\approx 33.1\). Figure 30 demonstrates the steering of the MWS beam of the 3S2DS sensor in the constant continued-steering directivity regime taken for different \({d}_{s}\) values.

Three-spoke two-dimension full range steerable acoustic sensor of lightweight loaded sections

Steering of the directivity function of the womb 3S2DS sensor of Fig. 29 in the azimuth plane
The normalized common-mode voltages \({V}_{cn,A}\), \({V}_{cn,B}\), and \({V}_{cn,C}\) of spokes \(A\), \(B\), and \(C\), respectively, used to steer the MWS beam by \(360^\circ\) in the azimuth plane are depicted in Fig. 31 for different \({d}_{s}\) values. As before, only when \({d}_{s}>{d}_{w}\) (the purple lines) the steering for constant directivity becomes discontinued.

Electrodes common-mode voltages used in steering the directivity function of the womb 3S2DS sensor of Fig. 29 in the azimuth plane
With the advent of this technology where a miniature millimeter size sensor can track the acoustic wave in all directions the current slowly flying propeller drones and helicopters used in the military field may be deferred from the battlefield in the future as they can be easily targeted by deploying low-cost acoustic-tracking land-to-air defense traps. In the most powerful part, steerable hybrid supersensitive and ultrasonic-speed compact units can be integrated into each independent MWS chip for passive and US active medical sensing.
4 General discussion of results
The variety of acoustic and micromotion biosignals related to the human body and the precise application of microforces for in vitro biomedical lab applications have broadened the perception of the need for more sophisticated motion sensors. Acoustic biosignal sensing covers wide requirements ranging from the need to achieve high sensitivity figures in passive motion sensing to the need to operate at ultrasonic MHz speeds in US imaging active sensing. Biomedical passive sensing examples may cover the sensing of biosignals originating from inside the human body such as heartbeats, lung sounds, snoring sounds, muscle reflexes, and turbulent fluid sounds. Sensitive passive motion sensing may also cover outer body stresses on the skin or at the different body joints providing solutions for example in prosthetic control and monitoring of the external body activity during sleeping. In US tomography applications electronic steering of the motion-sensing beam is an important demand to increase the productivity of the invented sensor unit.
The results demonstrated in the previous section (Sect. 3) were oriented to cover the demands needed for the described broad spectrum of biomedical applications. This objective was achieved by investigating the characteristics of the newly introduced concept of distributed mass sensors over a wide range of design MMA values at reset voltages (i.e. in the NAF operation). In the studied results it was found that in order not to have the sensor unit sensitive to the gravitational force effect in the reset voltage operation the distributed mass sensor should be designed for a minimum MMA value of about \({a}_{m}=100\,{\text{ms}}^{-2}\). This design case is considered in this section for comparison with the achievement of another author in the same field. The optical sensitivity of this sensor at reset voltages is about \(9.81 \%/g\) and it increases up to about \(335 \%/g\) when applying the maximum common mode voltage. Taking the number of cascaded differential phase shift sections of this sensor as \(N=64\) allows maximizing its bearable impact acceleration to an immense value of about \(211.3\times {10}^{3}\,{\text{ms}}^{-2}\) addressing the sensor as robust and maximizing its operation frequency at reset voltages to about 258.6 kHz. The length of the suspended slot waveguide of one cascaded section of this sensor is about \({L}_{s}=81.86\) μm. The area needed by the \(64\) cascaded differential phase shift sections of this sensor may fit in an area of less than around \(870\times 60 {\left(\mu m\right)}^{2}\) (utilizing seven multi-line rows of cascaded sensing elements).
To understand the significance of the above-presented parameters the contemporary MEMS accelerometer of Wang et al. [57] is taken here for comparison. The sensor of Wang et al. features a traditional heavy seismic mass which provides the inertial actuation for two capacitive structures located at two opposite sides of the seismic mass. The two capacitive structures support both functions of motion sensing and electrostatic actuation. The used system voltage of the sensor of Wang et al. was set at \(15.4 V\). The sensor of Wang et al. could reach a sensitivity of \(18.39 V/g\) which is equivalent to about \(120 \%/g\) of optical sensitivity at the rated system voltage. This sensitivity of the sensor of Wang et al. that was achieved with the support of the electrostatic force to reduce the spring constant is less by about \(2.8\) times than that of the distributed mass sensor of this study designed at the \({a}_{m}=100\,{\text{ms}}^{-2}\) in the NAF operation of about \(335 \%/g\). The reported operation frequency of the sensor of Wang et al. is less than around \(820 Hz\) which is less by \(73\) times than the lowest operation frequency of 59.5 kHz of the distributed mass sensor of this study designed at the \({a}_{m}=100\,{\text{ms}}^{-2}\) in the NAF operation resulted in the full turbo electrostatic boost. The sensor of Wang et al. operates in the low audio band whereas the presented distributed mass sensor designed at the \({a}_{m}=100\,{\text{ms}}^{-2}\) in the NAF operation already covers the operation in the low/medium US frequencies.
A recent study by Lei et al. [73] provides valuable information for comparing the characteristics of over \(50\) contemporary motion wave sensors that have been invented by many specialized researchers utilizing different operation principles based on optical path modulation, optical intensity modulation, optical phase modulation, and optical wavelength modulation. The study of Lei et al. provides valuable summary information outlined in useful categorized tables that indicate the authors, references, operation principles, and structures of the surveyed sensors. The tables of Lei et al. compare the operation frequency and sensitivity figures of the listed numerous sensors. The highest operation frequency that can be cited in those tables does not exceed 25 kHz and most of them do not exceed 10 kHz. The highest sensitivity that can be probably cited in those tables is \(2485 V/g\) of Lu et al. [158] obtained at the bitter expense of a very low operation speed under \(34.5 Hz\). The high supersensitivity of the sensor of Lu et al. may count to about \(25\times {10}^{3} \%/g (25 su)\) of equivalent percentage sensitivity when calculated in an example for a base system voltage of \(10 V\). The high sensitivity of the sensor of Lu et al. is comparable to the sensitivity of the distributed mass sensor designed at \({a}_{m}=1\,{\text{ms}}^{-2}\) in the reset voltages which can reach the value of \(33.5\times {10}^{3} \%/g (33.5 su)\) in the maximum common mode voltage application. However, the distributed mass sensor of \(64\) cascaded sections at this design specification can operate at a speed within the range of 9.434 to 41 kHz in the common mode voltage operation according to the data in Table 4 which is much higher than that of the Lu et al. sensor. Another pro feature of this distributed mass sensor compared to the sensor of Lu et al. is that its sensitivity can be tuned within the range from \(981 to 33.5\times {10}^{3} \%/g\) in the common mode voltage application and therefore it can preserve safe operation stability within a wide range of controlled sensitivities till reaching the limit of the highest sensitivity that can be achieved for the allowed noise margin. These comparison examples exemplify the superiority of the distributed mass sensor over all its rivals yielding the most sensitive and highest bandwidth response.
In summary, the result of comparing the performance of the studied distributed mass sensor with over 50 traditional motion detection sensors that are found in the literature is such that when roughly matching the sensitivities of the compared sensors the distributed mass sensor results in a much wider operation frequency, and when roughly matching the operation frequencies of the compared sensors the distributed mass sensor results in a much higher sensitivity. Additionally, an important feature of this study is the sweeping of the distributed mass sensor parameters over a wide stiffness MMA range presenting extensive data of time-consuming simulations. These data are important to cover the different requirements of the wide biomedical applications that were indicated in the introduction section that require enhancement of operation frequencies and optical sensitivities.
For US imaging applications, the studied distributed mass ICOEMS sensors are very efficient. At the MHz high-resolution US applications, the results in the last section indicate that the distributed mass sensor features a miniaturized footprint, capable of responding to a wide frequency band of acoustic vibrations, and can support an unlimited steering capability of the acoustic beam. For example the design for a high MMA rigidity of \({a}_{m}={10}^{7}\,{\text{ms}}^{-2}\) in the NAF operation would set the length of the suspended slot waveguide of one cascaded section to about \({L}_{s}=7.82\) μm. The area needed by \(64\) cascaded differential phase shift sections in one spoke of the MZI sensor may fit in an area of less than around \(180\times 40 {\left(\mu m\right)}^{2}\) (utilizing four multi-line rows of cascaded sensing elements). This particular design example attributes a frequency response up to about 25.3 MHz at the reset voltages and the application of the maximum common mode voltage to steer the acoustic beam would reduce the operation frequency to a minimum value of about 5.82 MHz. The compact footprint of the distributed mass sensors designed to operate at ultrasonic speeds allows the involvement of many sensor units to form sensor arrays that can enhance the directivity and electronic scanning features needed for advanced US applications. For comparison, the piezoceramic frequency steerable acoustic transducer of Mohammadgholiha et al. [34] is considered here. The structure of the sensor introduced by Mohammadgholiha et al. was constructed by patterning spiral electrodes on a piezoelectric plate bounded by a supporting aluminum plate. The pattern design of the spiral electrodes of that sensor as taken in the simulations was of an area of about \(80\times 80 {\left(mm\right)}^{2}\). The operation frequencies were taken in the medium US range from 100 to 250 kHz which may not be suitable for high-resolution US applications. The steering mechanism of that sensor required tuning the operation frequency within the range of 100 to 250 kHz to achieve around \(90^\circ\) of total steering angle. The steerable distributed mass sensors presented in this study can operate at a single US frequency in the MHz range, reach a wider or an unlimited steering angle range, and each distributed mass sensor unit is smaller by hundreds of times compared to the sensor studied by Mohammadgholiha et al.
For highly sensitive passive sensing of tiny ng low-frequency vibrations the distributed mass sensors challenge exceeding the crucial limits where traditional sensors fail. For example, challenging the design at reset voltages for MMA values of \({a}_{m}=0.1 and 0.01\,{\text{ms}}^{-2}\) a traditional sensor of a heavy single-section seismic mass will have impact accelerations smaller than the gravitational acceleration at these design parameters and therefore its suspension system will most likely shatter into pieces during the fabrication process. However, a distributed mass sensor of \(64\) cascaded sections has respective impact accelerations of about \(844.1 and 133.8\,{\text{ms}}^{-2}\) that may require careful handling of the sensor but may still be possible to be fabricated and used in real applications. Those supersensitive sensors may be used in the vertical alignment to avoid the gravitational force effect or a surface electrode may be bonded at the back of the chip to compensate for the gravitational effect when used in the horizontal alignment position. The lengths of the suspended slot waveguides at these design parameters are respectively about \(327.25 and 518.95\) μm requiring reasonable patterning areas of the cascaded phase shift sections of less than around \(1000\times 200 and 1100\times 280 {\left(\mu m\right)}^{2}\). The operation frequencies of those sensors at reset voltages are respectively around 3.76 and 1.5 kHz in the audio band sufficiently wide for the sensing of natural low-frequency ng vibrations. Those precision sensors can reach respective optical sensitivities of around \(334.6\times {10}^{3} \%/g (335 su)\) and \(3.35\times {10}^{6} \%/g (3350 su)\) when applying the maximum common-mode voltage. Those immense optical sensitivities have never been predicted by any previously studied ICOEMS sensor in the literature. Albeit the distributed mass sensors allow designing for higher sensitivities the natural boundary limits of the Brownian thermomechanical noise and the noises of the electronic readout system and lasing source would cap the maximum useful sensor sensitivity. The sensors studied in this research are immune to the intensity and phase noises of the lasing source due to the use of the optical intensity normalization of the detection signal and the use of the balanced MZI which counterbalanced the effect of similar phase fluctuations on its two symmetrical arms. Albeit these features sound helping to reach higher sensitivities the studied sensors may be still susceptible to the noise of the operation frequency of the laser due to the frequency-dependent response of the used MMI couplers. At the predicted high optical sensitivities reaching motion sensing resolutions smaller than 1 ng may become possible according to the predictions in Table 1. It is expected that the studied distributed mass sensors will become the preferred state-of-the-art supersensitive vibration sensors in the future.
Lastly, it is worth mentioning that the low voltage and low power operation requirements of the distributed mass sensors as demonstrated in the previous results section may make them ultimate for applications in portable and wearable medical devices used for diagnosis, treatment, and rehabilitation. The demonstrated unparalleled characteristics and features of the distributed mass sensors studied in this research no doubt entitle them as the best candidates to meet the future sophisticated demands of the medical field in the area of acoustic and vibration biosensing.
5 Conclusions and future studies
The rapidly expanding health sector demand for human–machine interfacing has been pushing towards exploiting various biosignal interactions for enhanced utilization of the medical-aided technology to provide supportive solutions during medical procedures of endoscopic and laparoscopic surgeries, US imaging, robotic prosthetic control, muscle stimulation therapy, and direct brain interfacing for therapy and disability assistive control. The utilization of hybrid biosignals including physiochemical biopotentials, mechanical tensions, and acoustic vibrations is promising in medical, aviation, military, and industry applications. Acoustic bio-sensing can provide non-harmful human–machine interaction. This research has been elucidating on covering passive and active MWS utilizing the novel technology of distributed-mass sensors. On comparing the characteristics of the distributed-mass acoustic sensors with the traditional ICOEMS sensors that use a heavy seismic mass it has been found that the novel LWLSs can enhance the performance by more than ten times. It has also been predicted that the combined effect of utilizing the lightweight loading principle with the cascaded architecture of the sensor can enhance the performance by hundreds of times compared to the best heavyweight single-section sensors.
Optical supersensitivity figures over \(33\times {10}^{3} \%/g\) (\(33 su\)) and ultrasonic operation speeds exceeding 27 MHz have been predicted in the research. Recognizing acoustic vibrations at resolutions less than 10 ng is found possible. At ultrasonic operation, it is found that the control voltages used for the LWLS are reasonable in the tens of Volts range whereas those required for the HWLS are dangerously high for in vivo medical applications in the hundreds of Volts range. Additionally, the LWLS is found to be much more compact and robust in operation compared to the HWLS. The studied distributed-mass sensors are also found amenable to steering the MWS beam in a 2D plane supporting distance-vector deep sensing capabilities. Two-spoke and three-spoke architectures covering respective \(116.64^\circ\) and \(360^\circ\) steering angles have been demonstrated theoretically in the study. At high supersensitivity demands the operation voltages of the studied sensor are found to be exceptionally small posing a big challenge to safely control them in practice avoiding the catastrophic pull-in effect. Experimental evaluation of the studied distributed mass sensor in future work is recommended to help better understand the limits for achieving high supersensitivity values and figure out the noise performance merits of this kind of novel sensor. The experimental characterization of the studied distributed mass sensors would also make it possible to evaluate the effect of possible fabrication nonideality of patterning the design details on different spots of the integration chip on the overall performance of the long cascaded sensor and the steering mechanism nonuniformities. Another limitation of the studied technology is the low directivity of the MWS pattern of the sensor of about 1.96 dB, but in theory, it may be enhanced in future studies by utilizing phased array architectures or by modifying the sensor principal architecture. The utilization of advanced multilayer integration templates in future studies may also help to achieve 3D electronic steering of the MWS beam which is an advanced demand that helps to shrink the size of the acoustic steerable units used in US imaging probes and allow superfast volume scanning capabilities. The engagement of hybrid acoustic differential phase shift sections in the sensor architecture for multifunction manipulation of the biosignal may also be an asset in future studies.
Data availability
The datasets generated and analyzed during the current study are available from the corresponding author upon reasonable request.
Change history
18 December 2023
A Correction to this paper has been published: https://doi.org/10.1007/s42452-023-05615-1
References
Shung KK, Zippuro M (1996) Ultrasonic transducers and arrays. IEEE Eng Med Biol Mag 15(6):20–30. https://doi.org/10.1109/51.544509
Taghaddos E, Hejazi M, Safari A (2015) Lead-free piezoelectric materials and ultrasonic transducers for medical imaging. J Adv Dielectr 5(2):1530002. https://doi.org/10.1142/s2010135x15300029
Koga D, Kusumi S, Shibata M, Watanabe T (2021) Applications of scanning electron microscopy using secondary and backscattered electron signals in neural structure. Front Neuroanat 15:759804. https://doi.org/10.3389/fnana.2021.759804
Christensen DA, Herron JN (2009) Optical system design for biosensors based on CCD detection. Biosens Biodetect. https://doi.org/10.1007/978-1-60327-567-5_13
Kapoor R (2009) CCD based fiber-optic spectrometer detection. Biosens Biodetect. https://doi.org/10.1007/978-1-60327-567-5_25
Desilets CS, Fraser JD, Kino GS (1978) The design of efficient broad-band piezoelectric transducers. IEEE Trans Sonics Ultrasonics 25(3):115–125. https://doi.org/10.1109/T-SU.1978.31001
He P (2000) Measurement of acoustic dispersion using both transmitted and reflected pulses. J Acoust Soc Am 107(2):801–807. https://doi.org/10.1121/1.428263
Han Z, Peng H, Pan J (2021) A two-steps implementation of 3D ultrasound imaging in frequency domain with 1D array transducer. Ultrasonics 114:106423. https://doi.org/10.1016/j.ultras.2021.106423
Roux E, Varray F, Petrusca L, Cachard C, Tortoli P, Liebgott H (2018) Experimental 3-D ultrasound imaging with 2-D sparse arrays using focused and diverging waves. Sci Rep 8(1):9108. https://doi.org/10.1038/s41598-018-27490-2
Huang Q, Zeng Z (2017) A review on real-time 3D ultrasound imaging technology. Biomed Res Int. https://doi.org/10.1155/2017/6027029
Fenster A, Parraga G, Bax J (2011) Three-dimensional ultrasound scanning. Interface. Focus 1(4):503–519. https://doi.org/10.1098/rsfs.2011.0019
Fenster A, Downey DB (2000) Three-dimensional ultrasound imaging. Annu Rev Biomed Eng 2(1):457–475. https://doi.org/10.1146/annurev.bioeng.2.1.457
Fenster A, Downey DB, Cardinal HN (2001) Three-dimensional ultrasound imaging. Phy Med Biol 46(5):R67. https://doi.org/10.1088/0031-9155/46/5/201
Fernandez AT, Gammelmark KL, Dahl JJ, Keen CG, Gauss RC, Trahey GE (2003) Synthetic elevation beamforming and image acquisition capabilities using an 8/spl times/128 175 D array. IEEE Trans Ultrason Ferroelectr Freq Control 50(1):40–57. https://doi.org/10.1109/TUFFC.2003.1176524
Wildes DG, Chiao RY, Daft CM, Rigby KW, Smith LS, Thomenius KE (1997) Elevation performance of 1.25 D and 15 D transducer arrays. IEEE Trans Ultrasonics Ferroelectrics Freq Control 44(5):1027–1037. https://doi.org/10.1109/58.655628
Thomenius KE (1996) Evolution of ultrasound beamformers. In: 1996 IEEE ultrasonics symposium. Proceedings, San Antonio, TX, USA, vol 2, pp 1615–1622. https://doi.org/10.1109/ULTSYM.1996.584398
Kruizinga P, van der Meulen P, Fedjajevs A, Mastik F, Springeling G, de Jong N, Bosch JG, Leus G (2017) Compressive 3D ultrasound imaging using a single sensor. Sci Adv 3(12):e1701423. https://doi.org/10.1126/sciadv.1701423
Wagner N, Eldar YC, Friedman Z (2012) Compressed beamforming in ultrasound imaging. IEEE Trans Signal Process 60(9):4643–4657. https://doi.org/10.1109/TSP.2012.2200891
Liebgott H, Basarab A, Kouamé D, Bernard O, Friboulet D (2012) Compressive sensing in medical ultrasound. In: 2012 IEEE international ultrasonics symposium, Dresden, Germany, pp 1–6. https://doi.org/10.1109/ULTSYM.2012.0486
Ikeda T, Yoshizawa S, Koizumi N, Mitsuishi M, Matsumoto Y (2016) Focused ultrasound and lithotripsy. Therapeutic Ultrasound 1:113–129. https://doi.org/10.1007/978-3-319-22536-4_7
Yoshizawa S, Ikeda T, Ito A, Ota R, Takagi S, Matsumoto Y (2009) High intensity focused ultrasound lithotripsy with cavitating microbubbles. Med Biol Eng Compu 47:851–860. https://doi.org/10.1007/s11517-009-0471-y
Moghimnezhad M, Shahidian A, Andayesh M (2021) Multiphysics analysis of ultrasonic shock wave lithotripsy and side effects on surrounding tissues. J Biomed Phys Eng 11(6):701. https://doi.org/10.31661/jbpe.v0i0.1182
Bailey MR, McAteer JA, Pishchalnikov YA, Hamilton MF, Colonius T (2006) Progress in lithotripsy research. Acoust Today 2(2):18–29
Moris M, Atar M, Kadayifci A, Krishna M, Librero A, Richie E, Brugge W, Wallace MB (2017) Thermal ablation of pancreatic cyst with a prototype endoscopic ultrasound capable radiofrequency needle device: A pilot feasibility study. Endoscopic Ultrasound 6(2):123. https://doi.org/10.4103/eus.eus_6_17
Ungureanu BS, Pirici D, Mărgăritescu C, Săndulescu L, Fronie S, Pătraşcu Ş, Şurlin V, Săftoiu A (2015) Endoscopic ultrasound-guided radiofrequency ablation of the pancreas: an experimental study with pathological correlation. Endoscopic Ultrasound 4(4):330. https://doi.org/10.4103/2303-9027.170426
Redwood M (1961) Transient performance of a piezoelectric transducer. J Acoust Soc Am 33(4):527–536. https://doi.org/10.1121/1.1908709
Jaffe H, Berlincourt DA (1965) Piezoelectric transducer materials. Proc IEEE 53(10):1372–1386. https://doi.org/10.1109/PROC.1965.4253
Adriaens HJ, De Koning WL, Banning R (2000) Modeling piezoelectric actuators. IEEE/ASME Trans Mechatron 5(4):331–341. https://doi.org/10.1109/3516.891044
Stepanishen PR (1981) Pulsed transmit/receive response of ultrasonic piezoelectric transducers. J Acoust Soc Am 69(6):1815–1827. https://doi.org/10.1121/1.385919
Martin KH, Lindsey BD, Ma J, Lee M, Li S, Foster FS, Jiang X, Dayton PA (2014) Dual-frequency piezoelectric transducers for contrast enhanced ultrasound imaging. Sensors 14(11):20825–20842. https://doi.org/10.3390/s141120825
Goel L, Jiang X (2020) Advances in sonothrombolysis techniques using piezoelectric transducers. Sensors 20(5):1288. https://doi.org/10.3390/s20051288
Senesi M, Baravelli E, De Marchi L, Ruzzene M (2012) Experimental demonstration of directional GW generation through wavenumber-spiral frequency steerable acoustic actuators. In: 2012 IEEE international ultrasonics symposium, Dresden, Germany. pp 2694–2697. https://doi.org/10.1109/ULTSYM.2012.0675.
Senesi M, Ruzzene M (2011) A spiral frequency steerable acoustic transducer for SHM. In: Proceedings of SPIE 7981, sensors and smart structures technologies for civil, mechanical, and aerospace systems 2011. https://doi.org/10.1117/12.880332
Mohammadgholiha M, Palermo A, Testoni N, Moll J, De Marchi L (2022) Finite element modeling and experimental characterization of piezoceramic frequency steerable acoustic transducers. IEEE Sens J 22(14):13958–13970. https://doi.org/10.1109/JSEN.2022.3181454
Song Y, Shen Y (2020) Steerable unidirectional wave emission from a single piezoelectric transducer using a shape memory alloy composite metasurface. In: Proceedings of the ASME 2020 international mechanical engineering congress and exposition. Volume 1: acoustics, vibration, and phononics. Virtual, Online. V001T01A003. ASME. https://doi.org/10.1115/IMECE2020-23460
Mohammadgholiha M, De Marchi L (2022) Pipeline structural health monitoring using frequency steerable acoustic transducers. In: 2022 IEEE international ultrasonics symposium (IUS), Venice, Italy, pp 1–4. https://doi.org/10.1109/IUS54386.2022.9958788
Acar C, Shkel AM (2003) Experimental evaluation and comparative analysis of commercial variable-capacitance MEMS accelerometers. J Micromech Microeng 13(5):634. https://doi.org/10.1088/0960-1317/13/5/315
Yuntao L, Xiaowei L, Weiping C, Qun W (2010) Design and noise analysis of a sigma–delta capacitive micromachined accelerometer. J Semicond 31(5):055006. https://doi.org/10.1088/1674-4926/31/5/055006
Jiang X, Wang F, Kraft M, Boser BE (2002) An integrated surface micromachined capacitive lateral accelerometer with 2μG/√ Hz resolution. In: Proceedings of the solid-state sensor, actuator and microsystems workshop 2002, Hilton Head Island, South Carolina, pp 202–205.
Wang YM, Chan PK, Li HK, Ong SE (2015) A low-power highly sensitive capacitive accelerometer IC using auto-zero time-multiplexed differential technique. IEEE Sens J 15(11):6179–6191. https://doi.org/10.1109/JSEN.2015.2448600
Haque RI, Loussert C, Sergent M, Benaben P, Boddaert X (2015) Optimization of capacitive acoustic resonant sensor using numerical simulation and design of experiment. Sensors 15(4):8945–8967. https://doi.org/10.3390/s150408945
Ocak IE, Kepenek R, Kulah H, Akin T (2010) A high performance Σ-Δ readout circuitry for μg resolution microaccelerometers. Analog Integr Circ Signal Process 64:137–145. https://doi.org/10.1007/s10470-009-9433-4
Zhou C, Zang J, Xue C, Ma Y, Hua X, Gao R, Zhang Z, Li B, Zhang Z (2022) Design of a novel medical acoustic sensor based on MEMS bionic fish ear structure. Micromachines 13(2):163. https://doi.org/10.3390/mi13020163
Surappa S, Satir S, Levent Degertekin F (2017) A capacitive ultrasonic transducer based on parametric resonance. Appl Phys Lett 111(4):043503. https://doi.org/10.1063/1.4995564
Chen MH, Hung SJ, Hsu JH, Lu MS (2007) Design and characterization of a CMOS micromachined capacitive acoustic sensor. In: Sensors, 2007 IEEE, Atlanta, GA, USA, pp 1148–1151. https://doi.org/10.1109/ICSENS.2007.4388610
Noell W, Clerc PA, Dellmann L, Guldimann B, Herzig HP, Manzardo O, Marxer CR, Weible KJ, Dandliker R, de Rooij N (2002) Applications of SOI-based optical MEMS. IEEE J Sel Top Quantum Electron 8(1):148–154. https://doi.org/10.1109/2944.991410
Zandi K, Wong B, Zou J, Kruzelecky RV, Jamroz W, Peter YA (2010) In-plane silicon-on-insulator optical MEMS accelerometer using waveguide fabry-perot microcavity with silicon/air bragg mirrors. In: 2010 IEEE 23rd international conference on micro electro mechanical systems (MEMS), Hong Kong, China, pp 839–842. https://doi.org/10.1109/MEMSYS.2010.5442337
Westerveld WJ, Pozo J, Harmsma PJ, Schmits R, Tabak E, van den Dool TC, Leinders SM, van Dongen KW, Urbach HP, Yousefi M (2012) Characterization of a photonic strain sensor in silicon-on-insulator technology. Opt Lett 37(4):479–481. https://doi.org/10.1364/OL.37.000479
Krause AG, Winger M, Blasius TD, Lin Q, Painter O (2012) A high-resolution microchip optomechanical accelerometer. Nat Photonics 6(11):768–772. https://doi.org/10.1038/nphoton.2012.245
Zhao M, Jiang K, Bai H, Wang H, Wei X (2020) A MEMS based Fabry-Pérot accelerometer with high resolution. Microsyst Technol 26:1961–1969. https://doi.org/10.1007/s00542-020-04747-3
Malayappan B, Krishnaswamy N, Pattnaik PK (2020) Novel high-resolution lateral dual-axis quad-beam optical MEMS accelerometer using waveguide Bragg gratings. Photonics, MDPI 7(3):49. https://doi.org/10.3390/photonics7030049
Sheikhaleh A, Abedi K, Jafari K (2017) An optical MEMS accelerometer based on a two-dimensional photonic crystal add-drop filter. J Lightwave Technol 35(14):3029–3034
Hosseinzadeh Sani M, Saghaei H, Mehranpour MA, Asgariyan Tabrizi A (2021) A novel all-optical sensor design based on a tunable resonant nanocavity in photonic crystal microstructure applicable in MEMS accelerometers. Photonic Sens 11:457–471. https://doi.org/10.1007/s13320-020-0607-0
Barbin ES, Nesterenko TG, Koleda AN, Shesterikov EV, Kulinich IV, Kokolov AA (2022) A system for positioning an optical tunnel measuring transducer of a microoptoelectromechanical micro-g accelerometer. In: 2022 IEEE 23rd international conference of young professionals in electron devices and materials (EDM), Altai, Russian Federation, pp 42–47. https://doi.org/10.1109/EDM55285.2022.9855026.
Hall NA, Okandan M, Littrell R, Serkland DK, Keeler GA, Peterson K, Bicen B, Garcia CT, Degertekin FL (2008) Micromachined accelerometers with optical interferometric read-out and integrated electrostatic actuation. J Microelectromech Syst 17(1):37–44. https://doi.org/10.1109/JMEMS.2007.910243
Han F, Sun B, Li L, Ma G (2013) A sensitive three-axis micromachined accelerometer based on an electrostatically suspended proof mass. In: Sensors, 2013 IEEE, Baltimore, MD, USA, pp 1–4. https://doi.org/10.1109/ICSENS.2013.6688167.
Wang C, Wang Y, Fang W, Song X, Quan A, Gidts M, Esteves R, Bai J, Liu H, Kraft M (2021) A Mems Accelerometer with an auto-tuning system based on an electrostatic anti-spring. In: 2021 IEEE 34th international conference on micro electro mechanical systems (MEMS), Gainesville, FL, USA, pp 184–187. https://doi.org/10.1109/MEMS51782.2021.9375285.
Wu J, Carley LR (2006) Electromechanical ∆∑ modulation with high-Q micromechanical accelerometers and pulse density modulated force feedback. EEE Trans Circ Syst I Reg Pap 53(2):274–287. https://doi.org/10.1109/TCSI.2005.857084
Gabrielson TB (1993) Mechanical-thermal noise in micromachined acoustic and vibration sensors. IEEE Trans Electron Devices 40(5):903–909. https://doi.org/10.1109/16.210197
Mohd-Yasin F, Nagel DJ, Korman CE (2009) Noise in MEMS. Meas Sci Technol 21(1):012001. https://doi.org/10.1088/0957-0233/21/1/012001
Kawamura Y, Kanegae R (2016) Feedback damping of a microcantilever at room temperature to the minimum vibration amplitude limited by the noise level. Sci Rep 6(1):27843. https://doi.org/10.1038/srep27843
Mohd-Yasin F, Nagel DJ (2021) Noise as diagnostic tool for quality and reliability of MEMS. Sensors 21(4):1510. https://doi.org/10.3390/s21041510
Macias M, Sierociuk D, Malesza W (2022) MEMS accelerometer noises analysis based on triple estimation fractional order algorithm. Sensors 22(2):527. https://doi.org/10.3390/s22020527
Selvarajan A (2003) Noise: how important is it in the applications of MEMS and MOEMS?. In: Proceedings SPIE 5055, smart structures and materials 2003: Smart Electronics, MEMS, BioMEMS, and Nanotechnology. https://doi.org/10.1117/12.510389
Guldimann B, Dubois P, Clerc PA, de Rooij N (2001) Fiber optic—MEMS accelerometer with high mass displacement resolution. In: Obermeier E (eds) Transducers ’01 Eurosensors XV. Springer, Berlin. https://doi.org/10.1007/978-3-642-59497-7_104
Soltanian E, Jafari K, Abedi K (2019) A novel differential optical MEMS accelerometer based on intensity modulation, using an optical power splitter. IEEE Sens J 19(24):12024–12030. https://doi.org/10.1109/JSEN.2019.2936752
Sheikhaleh A, Abedi K, Jafari K, Gholamzadeh R (2016) Micro-optoelectromechanical systems accelerometer based on intensity modulation using a one-dimensional photonic crystal. Appl Opt 55(32):8993–8999. https://doi.org/10.1364/AO.55.008993
Ahmadian M, Jafari K, Sharifi MJ (2018) Novel graphene-based optical MEMS accelerometer dependent on intensity modulation. ETRI J 40(6):794–801. https://doi.org/10.4218/etrij.2017-0309
Zhou N, Jia P, Liu J, Ren Q, An G, Liang T, Xiong J (2020) MEMS-based reflective intensity-modulated fiber-optic sensor for pressure measurements. Sensors 20(8):2233. https://doi.org/10.3390/s20082233
Zandi K, Zou J, Wong B, Kruzelecky RV, Peter YA (2011) VOA-based optical MEMS accelerometer. In: 16th international conference on optical MEMS and nanophotonics, Istanbul, Turkey, pp 15–16. https://doi.org/10.1109/OMEMS.2011.6031059.
Guan T, Ceyssens F, Puers R (2012) Polymer MOEMS accelerometer. Procedia Eng 47:120–123. https://doi.org/10.1016/j.proeng.2012.09.099
Gholamzadeh R, Gharooni M, Salarieh H, Akbari J (2022) Design and fabrication of a micro-opto-mechanical-systems accelerometer based on intensity modulation of light fabricated by a modified deep-reactive-ion-etching process using silicon-on-insulator wafer. J Vac Sci Technol B 40(4):043001. https://doi.org/10.1116/6.0001779
Lei YJ, Li RJ, Zhang LS, Hu PH, Huang QX (2022) Optical accelerometers for detecting low-frequency micro-vibrations. Appl Sci 12(8):3994. https://doi.org/10.3390/app12083994
Lu Q, Wang Y, Wang X, Yao Y, Wang X, Huang W (2021) Review of micromachined optical accelerometers: from mg to sub-μg. Opto-Electronic Adv 4(3):200045–1. https://doi.org/10.29026/oea.2021.200045
Upadhyaya AM, Hasan MK, Abdel-Khalek S, Hassan R, Srivastava MC, Sharan P, Islam S, Saad AM, Vo N (2021) A comprehensive review on the optical micro-electromechanical sensors for the biomedical application. Front Public Health 9:759032. https://doi.org/10.3389/fpubh.2021.759032
Algamili AS, Khir MH, Dennis JO, Ahmed AY, Alabsi SS, Ba Hashwan SS, Junaid MM (2021) A review of actuation and sensing mechanisms in MEMS-based sensor devices. Nanoscale Res Lett 16:1–21. https://doi.org/10.1186/s11671-021-03481-7
Chen C, Ding G, Zhang D, Cui Y, Li S (1998) Michelson fiberoptic accelerometer. Rev Sci Instrum 69(9):3123–3126. https://doi.org/10.1063/1.1149070
Chen C, Zhang D, Ding G, Cui Y (1999) Broadband Michelson fiber-optic accelerometer. Appl Opt 38(4):628–630. https://doi.org/10.1364/AO.38.000628
Chen GY, Zhang XL, Brambilla G, Newson TP (2011) Theoretical and experimental demonstrations of a microfiber-based flexural disc accelerometer. Opt Lett 36(18):3669–3671. https://doi.org/10.1364/OL.36.003669
Liu B, Zhong Z, Lin J, Wang X, Liu L, Shan M, Jin P (2017) Extrinsic Fabry-Pérot cantilever accelerometer based on micromachined 45° angled fiber. J Lightwave Technol 36(11):2196–2203. https://doi.org/10.1109/JLT.2017.2760901
Rivera HL, García-Souto JA, Sanz J (2000) Measurements of mechanical vibrations at magnetic cores of power transformers with fiber-optic interferometric intrinsic sensor. IEEE J Sel Top Quantum Electron 6(5):788–797. https://doi.org/10.1109/2944.892619
Hu W, Qian G, Li, RZ, Wan FH, Tang J, Zhang T (2014) A MZI based integrated optical accelerometer. In: Progress in electromagnetics research symposium. PIERS Proceedings, Guangzhou, China, pp 1272–1276. https://www.researchgate.net/publication/288169654_A_MZI_based_integrated_optical_accelerometer
Zhang G, Wu X, Ge Q, Li S, Zhang W, Shi J, Gui L, Yu B (2020) Axial strain applied in-fiber Mach-Zehnder interferometer for acceleration measurement. Opt Express 28(13):18596–18606. https://doi.org/10.1364/OE.391235
Wang X, Wu X, Li S, Ge Q, He T, Yu B (2015) Fiber-optic accelerometer based on a modal interferometer using a thin-core fiber. Opt Appl. https://doi.org/10.5277/oa150305
Shanbhag G, Varsha V, Sharma V, Karalatti KG, Lakshmi V, Venkatesh N, Srinivas T (2009) Analysis of non-uniform waveguide in MZI and optimization of the power confinement in the waveguide. In: 2009 IEEE student conference on research and development (SCOReD), Serdang, Malaysia, pp 543–546. https://doi.org/10.1109/SCORED.2009.5442941
Rahimi M, Malekmohammad M, Taghavi M, Noori M, Parsanasab GM (2022) Design and fabrication of a differential MOEMS accelerometer based on Fabry-Pérot micro-cavities. IEEE Sens J 22(15):14779–14785. https://doi.org/10.1109/JSEN.2022.3184979
Mireles J Jr, Sauceda Á, Jiménez A, Ramos M, Gonzalez-Landaeta R (2023) Design and development of a MOEMS accelerometer using SOI technology. Micromachines 14(1):231. https://doi.org/10.3390/mi14010231
Taghavi M, Abedi A, Parsanasab GM, Rahimi M, Noori M, Nourolahi H, Latifi H (2022) Closed-loop MOEMS accelerometer. Opt Express 30(12):20159–20174. https://doi.org/10.1364/OE.455772
Perez MA, Shkel AM (2007) Design and demonstration of a bulk micromachined Fabry–Pérot μg-resolution accelerometer. IEEE Sens J 7(12):1653–1662. https://doi.org/10.1109/JSEN.2007.909085
Zhao Z, Yu Z, Chen K, Yu Q (2017) A fiber-optic Fabry-Perot accelerometer based on high-speed white light interferometry demodulation. J Lightwave Technol 36(9):1562–1567. https://doi.org/10.1109/JLT.2017.2783882
Hong L, Sun R, Qiu Z, Han Z, Li Y (2021) A multi-cantilever beam low-frequency FBG acceleration sensor. Sci Rep 11(1):18502. https://doi.org/10.1038/s41598-021-98055-z
Reghuprasad AE, Colombero C, Godio A (2023) Serially connected cantilever beam-based FBG accelerometers: design, optimization and testing. Sensors 23(6):3188. https://doi.org/10.3390/s23063188
Li J, Wang GY, Sun JN, Maier RR, Macpherson WN, Hand DP, Dong FZ (2017) Micro-machined optical fiber side-cantilevers for acceleration measurement. IEEE Photonics Technol Lett 29(21):1836–1839. https://doi.org/10.1109/LPT.2017.2753279
Casas-Ramos MA, Castillo-Barrera LG, Sandoval-Romero GE (2018) Optical accelerometer for seismic measurement. Vibroeng Procedia 21:38–41. https://doi.org/10.21595/vp.2018.20379
Hong L, Wu M, Chen Y, Li Y (2021) Low-cost fiber optic cantilever accelerometer with a spherical tip based on gaussian beam focusing. IEEE Photonics J 13(4):1–6. https://doi.org/10.1109/JPHOT.2021.3099827
Xin C, Zhang Z, Wang X, Fan C, Li M (2022) Ultracompact single-layer optical MEMS accelerometer based on evanescent coupling through silicon nanowaveguides. Sci Rep 12(1):21697. https://doi.org/10.1038/s41598-022-25760-8
Feng Y, Yang W, Zou X (2022) Design and simulation study of an optical mode-localized MEMS accelerometer. Micromachines 14(1):39. https://doi.org/10.3390/mi14010039
Barbin E, Nesterenko T, Koleda A, Shesterikov E, Kulinich I, Kokolov A (2023) An optical measuring transducer for a micro-opto-electro-mechanical micro-g accelerometer based on the optical tunneling effect. Micromachines 14(4):802. https://doi.org/10.3390/mi14040802
Jaksic Z, Radulovic K, Tanaskovic D (2004) MEMS accelerometer with all-optical readout based on twin-defect photonic crystal waveguide. 2004 24th International Conference on Microelectronics (IEEE Cat. No.04TH8716), Nis, Serbia, vol 1, pp 231–234. https://doi.org/10.1109/ICMEL.2004.1314602.
Liu H, She X, Shen H, Chen L, Bi R, Chen K, Shu X (2023) Monolithic integrated cavity optomechanical accelerometer based on push-pull photonic crystal zipper cavity. Opt Eng 62(3):037107. https://doi.org/10.1117/1.OE.62.3.037107
Trigona C, Andò B, Baglio S (2014) Design, fabrication, and characterization of BESOI-accelerometer exploiting photonic bandgap materials. IEEE Trans Instrum Meas 63(3):702–710. https://doi.org/10.1109/TIM.2013.2277534
Andò B, Baglio S, Trigona C (2012) Design, fabrication, and characterization of BESOI-accelerometer based on photonic band gap effect. In: 2012 IEEE international instrumentation and measurement technology conference proceedings, Graz, Austria, pp 2309–2312. https://doi.org/10.1109/I2MTC.2012.6229537.
Subramanian S, Upadhyaya AM, Sharan P (2017) Structure design of photonic crystal based MOEMS accelerometer sensor for supplemental restraint system in automobile passenger safety. Indian J Sci Technol. https://doi.org/10.17485/ijst/2017/v10i29/117327
Taghavi M, Latifi H, Parsanasab GM, Abedi A, Nikbakht H, Poorghadiri MH (2021) A dual-axis MOEMS accelerometer. IEEE Sens J 21(12):13156–13164. https://doi.org/10.1109/JSEN.2021.3072333
Abozyd S, Toraya A, Gaber N (2022) Design and modeling of fiber-free optical MEMS accelerometer enabling 3D measurements. Micromachines 13(3):343. https://doi.org/10.3390/mi13030343
Hussein AA (2022) Adaptive opto-electromechanical silicon-on-insulator increased bandwidth accelerometer. SN Appl Sci 4(2):41. https://doi.org/10.1007/s42452-021-04922-9
Seifried M, Villares G, Baumgartner Y, Hahn H, Halter M, Horst F, Caimi D, Caër C, Sousa M, Dangel RF, Czornomaz L (2018) Monolithically integrated CMOS-compatible III–V on silicon lasers. IEEE J Sel Top Quantum Electron 24(6):1–9. https://doi.org/10.1109/JSTQE.2018.2832654
Wei WQ, He A, Yang B, Wang ZH, Huang JZ, Han D, Ming M, Guo X, Su Y, Zhang JJ, Wang T (2023) Monolithic integration of embedded III-V lasers on SOI. Light Sci Appl 12(1):84. https://doi.org/10.1038/s41377-023-01128-z
Xiong C, Bell B, Eggleton BJ (2016) CMOS-compatible photonic devices for single-photon generation. Nanophotonics 5(3):427–439. https://doi.org/10.1515/nanoph-2016-0022
Mauthe S, Triviño NV, Baumgartner Y, Sousa M, Caimi D, Stöferle T, Schmid H, Moselund KE (2019) InP-on-Si optically pumped microdisk lasers via monolithic growth and wafer bonding. IEEE J Sel Top Quantum Electron 25(6):1–7. https://doi.org/10.1109/JSTQE.2019.2915924
Wen P, Tiwari P, Scherrer M, Lörtscher E, Gotsmann B, Moselund KE (2022) Thermal simulation and experimental analysis of optically pumped InP-on-Si micro-and nanocavity lasers. ACS Photonics 9(4):1338–1348. https://doi.org/10.1021/acsphotonics.1c01951
Shi Y, Ma L, Zhuang Y, He Z (2020) Investigation on roughness-induced scattering loss of small-core polymer waveguides for single-mode optical interconnect applications. Opt Express 28(26):38733–43844. https://doi.org/10.1364/OE.410283
Yap KP, Delâge A, Lapointe J, Lamontagne B, Schmid JH, Waldron P, Syrett BA, Janz S (2009) Correlation of scattering loss, sidewall roughness and waveguide width in silicon-on-insulator (SOI) ridge waveguides. J Lightwave Technol 27(18):3999–4008
Guiana B, Zadehgol A (2022) Characterizing THz scattering loss in nano-scale SOI waveguides exhibiting stochastic surface roughness with exponential autocorrelation. Electronics 11(3):307. https://doi.org/10.3390/electronics11030307
Shang H, Sun D, Yu P, Wang B, Yu T, Li T, Jiang H (2020) Investigation for sidewall roughness caused optical scattering loss of silicon-on-insulator waveguides with confocal laser scanning microscopy. Coatings, MDPI 10(3):236. https://doi.org/10.3390/coatings10030236
Van Acoleyen K, Roels J, Claes T, Van Thourhout D, Baets R (2011) NEMS-based optical phase modulator fabricated on silicon-on-insulator. In: 8th IEEE international conference on group IV photonics, London, UK, pp 371–373. https://doi.org/10.1109/GROUP4.2011.6053820.
Van Acoleyen K, Roels J, Mechet P, Claes T, Van Thourhout D, Baets R (2012) Ultracompact phase modulator based on a cascade of NEMS-operated slot waveguides fabricated in silicon-on-insulator. IEEE Photonics J 4(3):779–788. https://doi.org/10.1109/GROUP4.2011.6053820
Chiu WC, Chang CC, Wu JM, Lee MC, Shieh JM (2011) Optical phase modulators using deformable waveguides actuated by micro-electro-mechanical systems. Opt Lett 36(7):1089–1091. https://doi.org/10.1364/OL.36.001089
Hussein AA, Majid SA, Hall TJ (2014) Design of compact tunable wavelength division multiplexing photonic phased array switches using nano-electromechanical systems on a silicon-on-insulator integration platform. Opt Quant Electron 46:1313–1320. https://doi.org/10.1007/s11082-013-9865-z
Sun H, Qiao Q, Guan Q, Zhou G (2022) Silicon photonic phase shifters and their applications: a review. Micromachines 13(9):1509. https://doi.org/10.3390/mi13091509
Almeida VR, Xu Q, Barrios CA, Lipson M (2004) Guiding and confining light in void nanostructure. Opt Lett 29(11):1209–1211. https://doi.org/10.1364/OL.29.001209
Almeida VR, Xu Q, Panepucci RR, Barrios CA, Lipson M (2003) Light guiding in low index materials using high-index-contrast waveguides. MRS Online Proceedings Library (OPL) 797:W6-10. https://doi.org/10.1557/PROC-797-W6.10
Xu Q, Almeida VR, Panepucci RR, Lipson M (2004) Experimental demonstration of guiding and confining light in nanometer-size low-refractive-index material. Opt Lett 29(14):1626–1628. https://doi.org/10.1364/OL.29.001626
Rodriguez AW, Hui PC, Woolf DP, Johnson SG, Lončar M, Capasso F (2015) Classical and fluctuation-induced electromagnetic interactions in micron-scale systems: designer bonding, antibonding, and Casimir forces. Ann Phys 527(1–2):45–80. https://doi.org/10.1002/andp.201400160
De Leonardis F, De Carlo M, Passaro VM (2017) Design rules for a nano-opto-mechanical actuator based on suspended slot waveguides. Photonics, MDPI 4(3):43. https://doi.org/10.3390/photonics4030043
Li M, Pernice WH, Xiong C, Baehr-Jones T, Hochberg M, Tang HX (2008) Harnessing optical forces in integrated photonic circuits. Nature 456(7221):480–484. https://doi.org/10.1038/nature07545
Feng Y, Thomson DJ, Mashanovich GZ, Yan J (2020) Performance analysis of a silicon NOEMS device applied as an optical modulator based on a slot waveguide. Opt Express 28(25):38206–38222. https://doi.org/10.1364/OE.411933
Lorenzani S, Desvillettes L (2012) A kinetic approach for the evaluation of damping in micro-electro-mechanical systems devices vibrating at high frequencies. AIP Conf Proc Am Inst Phys 1501(1):802–808. https://doi.org/10.1063/1.4769624
Lu Q, Fang W, Wang C, Bai J, Yao Y, Chen J, Xu X, Huang W (2021) Investigation of a complete squeeze-film damping model for MEMS devices. Microsyst Nanoeng 7(1):54. https://doi.org/10.1038/s41378-021-00279-6
Kumar H, Mukhopadhyay S (2020) Thermoelastic damping analysis in microbeam resonators based on Moore–Gibson–Thompson generalized thermoelasticity theory. Acta Mech 231(7):3003–3015. https://doi.org/10.1007/s00707-020-02688-6
Al-Lehaibi EA (2022) The vibration analysis of a nanobeam due to a ramp-type heating under Moore-Gibson-Thompson theory of thermoelasticity. J Vibroeng 24(3):394–404. https://doi.org/10.21595/jve.2021.22231
Sacher WD, Huang Y, Ding L, Barwicz T, Mikkelsen JC, Taylor BJ, Lo GQ, Poon JK (2014) Polarization rotator-splitters and controllers in a Si 3 N 4-on-SOI integrated photonics platform. Opt Express 22(9):11167–11174. https://doi.org/10.1364/OE.22.011167
Zhou H, Zhao Y, Wei Y, Li F, Dong J, Zhang X (2019) All-in-one silicon photonic polarization processor. Nanophotonics 8(12):2257–2267. https://doi.org/10.1515/nanoph-2019-0310
Mia MB, Jaidye N, Ahmed I, Ahmed SZ (2023) Broadband integrated polarization splitter and rotator using subwavelength grating claddings. Opt Express 31(3):4140–4151. https://doi.org/10.1364/OE.479195
Zhang Y, He Y, Zhu Q, Jiang X, Guo X, Qiu C, Su Y (2018) On-chip silicon polarization and mode handling devices. Front Optoelectron 11:77–91. https://doi.org/10.1007/s12200-018-0772-6
Soldano LB, Pennings EC (1995) Optical multi-mode interference devices based on self-imaging: Principles and applications. J Lightwave Technol 13(4):615–627. https://doi.org/10.1109/50.372474
Bachmann M, Besse PA, Melchior H (1994) General self-imaging properties in N× N multimode interference couplers including phase relations. Appl Opt 33(18):3905–3911. https://doi.org/10.1364/AO.33.003905
Zhao J, Wen A, Liu Z, Yue P (2008) Optimal design of multimode interference couplers using an improved self-imaging theory. Opt Commun 281(6):1576–1581. https://doi.org/10.1016/j.optcom.2007.11.039
Heaton JM, Jenkins RM (1999) General matrix theory of self-imaging in multimode interference (MMI) couplers. IEEE Photonics Technol Lett 11(2):212–214. https://doi.org/10.1109/68.740707
Cahill L (2006) The modelling of MMI devices. In: 2006 international conference on transparent optical networks, Nottingham, UK, pp 138–141. https://doi.org/10.1109/ICTON.2006.248357.
Błahut M, Kasprzak D (2004) Multimode interference structures–properties and applications. Opt Appl 34(4):573–587
Prinzen A, Waldow M, Kurz H (2013) Fabrication tolerances of SOI based directional couplers and ring resonators. Opt Express 21(14):17212–17220. https://doi.org/10.1364/OE.21.017212
Chen GF, Ong JR, Ang TY, Lim ST, Png CE, Tan DT (2017) Broadband silicon-on-insulator directional couplers using a combination of straight and curved waveguide sections. Sci Rep 7(1):7246. https://doi.org/10.1038/s41598-017-07618-6
Xu Y, Tian Z, Meng X, Chai Z (2022) Methods and applications of on-chip beam splitting: a review. Front Phys 10:985208. https://doi.org/10.3389/fphy.2022.985208
Arunkumar R, Jayabarathan JK, Robinson S (2019) Design and analysis of optical Y-splitters based on two-dimensional photonic crystal ring resonator. J Optoelectron Adv Mater 21(7–8):435–442
Hill MT, Leijtens XJ, Khoe GD, Smit MK (2003) Optimizing imbalance and loss in 2× 2 3-dB multimode interference couplers via access waveguide width. J Lightwave Technol 21(10):2305–2313. https://doi.org/10.1109/JLT.2003.818164
Lorenzo RM, Llorente C, Abril EJ, López M (1998) Improved self-imaging characteristics in 1× N multimode couplers. IEE Proc Optoelectron 145(1):65–69. https://doi.org/10.1049/ip-opt:19981721
Gupta AR (2003) Optimization of access waveguide width of multimode interference (MMI) couplers. Opt Commun 221(1–3):99–103. https://doi.org/10.1016/S0030-4018(03)01471-8
Halir R, Molina-Fernández I, Ortega-Monux A, Wanguemert-Perez JG, Xu DX, Cheben P, Janz S (2008) A design procedure for high-performance, rib-waveguide-based multimode interference couplers in silicon-on-insulator. J Lightwave Technol 26(16):2928–2936. https://doi.org/10.1109/JLT.2007.914511
Ortega-Monux A, Zavargo-Peche L, Maese-Novo A, Molina-Fernández I, Halir R, Wanguemert-Perez JG, Cheben P, Schmid JH (2011) High-performance multimode interference coupler in silicon waveguides with subwavelength structures. IEEE Photonics Technol Lett 23(19):1406–1408. https://doi.org/10.1109/LPT.2011.2161866
Ye C, Zhang M, Shi Y, Dai D (2020) Broadband dual-mode 2× 2 3 dB multimode interference couplers with a shallowly etched multimode section. Appl Opt 59(24):7308–7312. https://doi.org/10.1364/AO.397676
Yin R, Jiang X, Yang J, Wang M (2002) Structure with improved self-imaging in its graded-index multimode interference region. J Opt Soc Am B 19(6):1301–1303. https://doi.org/10.1364/JOSAB.19.001301
Molina-Fernandez I, Ortega-Moñux A, Wangüemert-Pérez JG (2009) Improving multimode interference couplers performance through index profile engineering. J Lightwave Technol 27(10):1307–1314
154. Środa E, Gawlik A, Olszewski J, Urbańczyk W (2023) Correction of phase errors in multimode interference couplers using rectangular surface relief grating. In: Integrated optics: devices, materials, and technologies XXVII. SPIE 12424, pp 292–302. https://doi.org/10.1117/12.2664401
Maese-Novo A, Halir R, Romero-García S, Pérez-Galacho D, Zavargo-Peche L, Ortega-Moñux A, Molina-Fernández I, Wangüemert-Pérez JG, Cheben P (2013) Wavelength independent multimode interference coupler. Opt Express 21(6):7033–7040. https://doi.org/10.1364/OE.21.007033
Hussein AA, Majid SA, Hall TJ (2013) Design, simulation, and fabrication of nano-scale silicon-on-insulator (SOI) integrated photonic phased array switch elements (IPPAS) utilizing nanoelectromechanical systems (NEMS). Photonics North. Proc SPIE 8915:257–270. https://doi.org/10.1117/12.2041748
Esposito D, Centracchio J, Andreozzi E, Gargiulo GD, Naik GR, Bifulco P (2021) Biosignal-based human–machine interfaces for assistance and rehabilitation: a survey. Sensors 21(20):6863. https://doi.org/10.3390/s21206863
Lu Q, Bai J, Wang K, He S (2017) Design, optimization, and realization of a high-performance MOEMS accelerometer from a double-device-layer SOI wafer. J Microelectromech Syst 26(4):859–869. https://doi.org/10.1109/JMEMS.2017.2693341
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Contributions
The proposal, ideas, study details, methods, literature survey, theoretical analysis, simulations, numerical computations, drawings, script writing, results interpretations, manuscript writing, and other related matters have all been made by Ali Abdulsattar Hussein.
Corresponding author
Ethics declarations
Conflict of interest
The author has no relevant financial or non-financial interests to disclose.
Ethical approval
This article does not contain any studies with human participants or animals performed by the author.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The original version of this article has been revised: Equations (11), (12) and (19) have been corrected.
Appendices
Appendices
Appendix 1
Optical sensitivity (\({S}_{op}\)) definitions in different units:
\({a}_{m}\) is the MMA at the full-scale deflection range. The resolution (\(R\)) for a linear detection system in different units:
\({D}_{dis}\) is the number of display digits.
Appendix 2
In Sect. 3.7.4, to steer the motion-wave sensing beam in the azimuth plane the following algorithm may be used conveniently:
1. For \(0^\circ <{\theta }_{s}<120^\circ\), set \({d}_{C}={d}_{p,min}\), then;
2. For \(120^\circ <{\theta }_{s}<240^\circ\), set \({d}_{A}={d}_{p,min}\), then;
3. For \(240^\circ <{\theta }_{s}<360^\circ\), set \({d}_{B}={d}_{p,min}\), then;
Appendix 3
For the convenience of reading the research paper Table
8 contains a list of the used acronyms.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Hussein, A.A. The first distributed-mass high-performance programmable optoelectromechanical steerable motion-wave sensors focused on sophisticated biomedical applications. SN Appl. Sci. 5, 346 (2023). https://doi.org/10.1007/s42452-023-05558-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-023-05558-7