
Abstract
In power system studies the unit commitment problem (UC) is solved to support market decisions and assess system adequacy. Simplifications are made to solve the UC faster, but they are made without considering the consequences on solution quality. In this study we thoroughly investigated the impacts of simplifications on solution quality and computation time on a benchmark set consisting of almost all the available instances in the literature. We found that omitting the minimum up- and downtime and simplifying the startup cost resulted in a significant quality loss without reducing the computation time. Omitting reserve requirements, ramping limits and transmission limits reduced the computation time, but degraded the solution significantly. However, the linear relaxation resulted in less quality loss with a significant speed-up and resulted in no difference when unserved energy was minimized. Finally, we found that the average and maximum capacity factor difference is large for all model variants.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The unit commitment problem (UC) is a family of optimization problems about deciding on the operation of electrical generators. The goal is to find a minimum cost schedule of generators that satisfies the demand at each timestep. In power system studies, the UC is being solved for time horizons of days to years to support market decisions or assess system adequacy [1,2,3,4,5,6]. For some time now UC has been an active research topic and many algorithms have been proposed [7,8,9]. Mathematical programming techniques have been the most successful to find near optimal schedules for this NP-hard problem [7, 10]. For example, the UC is often formulated as a Mixed Integer Linear Programming (MILP) problem and solved with commercial solvers such as Gurobi or CPLEX.
Constraints in a UC model represent essential characteristics of the power system. However, the set of constraints and associated characteristics included in UC models varies for different formulations. Table 1 demonstrates the large variety of algorithms and formulations that have been implemented to solve UC problems.
In power system studies, the UC problems are sometimes simplified to save computation time. For example, the ramping limits, minimum up- and downtime, reserve requirements or integer requirements are relaxed in adequacy studies [5, 6]. Moreover, when solving the UC for a whole year the problem is often broken into smaller parts. First, a whole year is solved with a simplified model that omits most unit commitment constraints, to fix certain variables such as storage levels and planned outages [1, 2, 11]. Next, with those fixed values, a more detailed UC is solved on a much smaller time horizon of a few days. A drawback is that all these simplifications often are made without analyzing their effect on solution quality.
In a related problem, the generation expansion problem, UC constraints have also been omitted to save computation time [12,13,14]. For these generation expansion problems, numerous studies investigated to what extent errors arise from simplifications in the context of those expansion decisions. These studies have emphasized on power system simplifications, in terms of omitting unit commitment constraints, in the context of a generation expansion problem as opposed to the unit commitment problem itself. Moreover, almost all studies focus on a single power system [12, 14,15,16,17].
Therefore, it is valuable to gain insights into the effect of omitting power system constraints on the solution quality, the violation of the omitted constraints, and the computational speed-up in the context of the UC. Furthermore, it is important to investigate this thoroughly by using a large and variate set of power systems. This paper addresses the following question: “What is the influence of choices in power system modeling on the results and performance of the UC problem?”
To answer this question, we created and published a benchmark set of UC instances consisting of almost all the available UC instances in the literatureFootnote 1. On those instances we performed multiple experiments with the full UC problem and its simplifications. We then used several indicators to compare the computation time and quality of the solutions between the different UC formulations. Our research paper contributes to the existing literature in the following way:
-
We performed a comprehensive study of model simplifications in the unit commitment problem. In total in this article, we present the effect of 21 different model simplifications and variants; We investigated the linear relaxation of the model, the relaxation of the ramping limits, minimum up- and downtime and the removal of the reserve requirements. We also studied the model variants where energy not served instead of the total cost is minimized. Moreover, we investigated multiple piece-wise linear approximation of the quadratic generation cost function and, furthermore, we studied 4 different methods of modeling the transmission system.
-
We performed our computational experiments on a large and variate data set, 17 in total consisting of almost all available UC instances in the literature. Moreover, we performed every experiment 30 times with a slight perturbation of the electricity demand to get robust results.
-
Our systematic research gives insight into which model simplifications result in a computation gain with little or no loss in quality, which simplifications results in a trade-off between computation time and quality and which model simplifications results in no computational gain at all.
-
We also complemented the existing literature by studying these simplifications in the context of the unit commitment problem and not in the context of the generation expansion problem.
-
We published the benchmark, we collected from existing literature and put it into a single format. This benchmark can be used to compare algorithms that solve the UC, for which there is a need (see [10]), or it can be used for other power system studies.
The experiments in this article were performed on a deterministic UC formulation and uncertainty, besides the reserve requirements of the system, is not taken into account.
The remainder of this paper is organized as follows. In Sect. 2 we provide an overview of the different aspects of the power systems modeled in UC problems together with their mathematical formulation. Next, we describe our methodology, experimental setup, and present the benchmark of UC instances in Sect. 3. Our results are presented in Sect. 4, and we conclude with our findings, limitations, and comparison with existing literature in Sect. 5.
2 Unit commitment problem
In this section we discuss which characteristics of the power system can be included in UC problems and how they can be mathematically formulated. Characteristics relate to the efficiency and flexibility limits of the thermal electrical generators, and limitations to the supply of hydropower plants, variable renewable energy sources (VRES) and storage units. Furthermore, it must be ensured that the electricity demand is always met in each region, that sufficient reserves are available, and that transmission constraints are dealt with.
In Sect. 2.1 we introduce the decision variables in the UC and associated variables and in Sect. 2.2 the components of the objective function. In Secst. 2.3–2.7 the constraints of the UC are presented.
2.1 Decision variables
A solution of the UC is a schedule that dictates which electrical generators should be on and how much energy they should generate at each timestep. Additionally, the solution can contain information on electrical flows in the grid, curtailment of VRES, loss of load, allocation of reserves, storage, and demand response. These variables will be defined in the corresponding sections.
2.1.1 Commitment and dispatch decision variables
The main decision variables in UC are defined as follows. Let G be the set of generators and T the set of timesteps. For every generator \(g\in G\) and every timestep \(t \in T\), \(p_{gt}\) is defined as the power level of generator g at time t. Moreover, \(u_{gt} \in \{0,1\}\) prescribes the commitment decision, where \(u_{gt}=1\) when generator g is on at time t. Let S be the set of storage units, and \(pc_{st}\) and \(pd_{st}\) describe the amount of charge and discharge of storage unit \(s\in S\) at time t. Let R be the set of all renewable energy sources and \(p_{rt}\) the production of renewable energy source \(r\in R\) at time t.
Besides decision variables an UC model can include “auxiliary variables” like start and stop variables. These variables are not necessary to implement a schedule obtained by solving the UC problem, but can help to formulate constraints and analyze the solution. These variables will be introduced on the fly.
2.1.2 Auxiliary commitment variables
In the 3 binary commitment variables (3-bin) formulation, shutdown and startup events have their own commitment variables \(w_{gt}\) and \(v_{gt}\) when generator g stops (starts) at time t. Although these auxiliary variables are not essential as their values can be inferred from the commitment decisions, they make the constraints more readable. Furthermore, the 3-bin formulation is tighter than the 1-bin formulation [66]. This means that linear relaxation of the 3-bin formulation results in an objective value closer to that of the MILP problem than linear relaxation of the 1-bin formulation. This stronger objective value can then be used as a lower bound in the MILP problem. In the 3-bin formulation we define the logical relation between the three types of commitment variables by the following “logic” constraint:
2.1.3 Alternative dispatch decision variable
In most UC formulations \(p_{gt}\) is used as the dispatch variable in the constraints. However, Knueven et al. [67] found that using an alternative dispatch decision variable \(p'_{gt}\) representing the power level above the minimum stable level leads to a computational faster model. This variable can be related to \(p_{gt}\) in the following way:
2.2 Objective function
The objective of the UC is to minimize the total cost of operating the power system over a time horizon. The total cost includes the cost of the operation of generators and when applicable a penalty cost for loss of load and/or loss of reserves. The objective function is defined as: 3
where \(cost^{gen}_{gt}\) is the generation cost and \(cost^{cycle}_{gt}\) is the cycling cost of unit \(g\) at time step \(t\) i.e. the cost of starting up and shutting down. The system cost \(cost^{system}_{t}\) is the cost of loss of load and loss of reserve.
2.2.1 Quadratic Generation Cost
The generation cost consists of a constant cost component for running a generator and a cost component that increases with the power level due to higher fuel cost, CO2 emission cost, and variable operational and maintenance costs [68]. The relation between the generation cost and the power level can be characterized by the following quadratic cost function [69]:
where \(a_g\) is the parameter that represents the constant cost and \(b_g\) and \(c_g\) represent the linear and quadratic cost dependent on the power level \(p_{gt}\). This quadratic cost function can be a simplification of a nonconvex [69], non-monotonic [70] ‘rippled’ function reflecting the sequential opening of different valves in a power plant to increase the power output. Thermal power plants often have lower efficiencies at partial load resulting in relatively higher costs. The generation cost function captures this property when \(a_g> 0\) [71]. In most UC problems, the parameters \(a_g\), \(b_g\), and \(c_g\) are constant, but in reality they may change per time step [37, 68, 72].
When solving the UC problem with MILP the quadratic cost function is approximated with a piece-wise linear [37] or linear [68, 72, 73] cost function. The piece-wise linear approximation can capture the characteristics of the quadratic cost function accurately [74], but some authors argue that even a linear approximation is accurate enough [73, 75].
2.2.2 Piece-wise linear generation cost function

The piece-wise approximation of the convex quadratic cost generation cost function always overestimates the cost
To solve the UC problem with a MILP solver the generation cost function needs to be linearized. A quadratic cost function can be split into multiple pieces which can each be approximated by a linear cost function. This piece-wise linear approximation consists of K linear segments with their own maximum \(\overline{P}_{gk}\):
Each segment \(k\) has its own power level variable \(p_{gtk}\) such that their sum is equal to the power level of the generator:
Each segment has its own slope \(s_{k}\). The slope \(s_{k}\)based on the additional generation cost divided by the additional production between the start and end of the segment. Since the cost function is convex, the slopes are increasing in k. Hence, the segments will be used in increasing order which implies that equation (6) is valid. This approximation will always overestimate the convex quadratic generation cost that is not on the boundary of a segment (Fig. 1). Quadratic costs can be linearized with alternative methods, but these are often not explicitly described in the literature [40]. The cost of a generator can be specified as:
Where \((a_g+ b_g \underline{P}+ c_g \underline{P}^2)\) is the cost of the quadratic cost function evaluated at \(\underline{P}\).
2.2.3 Cycle Cost

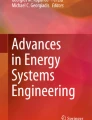
The relation between the startup cost and time since last shutdown. In this example, the relation is approximated by a step-function with 3 startup types with corresponding intervals and cost
Cycling is changing the power level of thermal generators by ramping, starting up and shutting down [76]. Cycle cost can be modeled as:
where \(SC_{gt}\) and \(SDC_{gt}\) are the startup and shutdown cost, respectively. However, the shutdown is often not modelled explicitly [7] and could be included in the startup cost. Some authors also model ramping cost [68] but this is not included in our models.
The startup cost can also depend on the time since the generator was last shutdown. This can, for example, take into account that after a recent shutdown a thermal generator needs less fuel to return to the desired temperature and that less temperature fluctuation leads to less operational and maintenance costs [81]. In this time-dependent formulation, a variable cost component is added to the fixed startup cost component as follows [69]:
where \(\lambda _g\) is the heat-loss coefficient and \(l\) is the time since the generator last shutdown, VSC is the variable startup cost and FSC is the fixed startup cost.
Often this exponential function is approximated with a monotonic increasing step-function (Fig. 2) in which the time after last shutdown is split into intervals. Each interval belongs to a startup type s that has a startup cost \(SC^{s}\) associated with it. Then for each startup type a new decision variable \(v^s_{gt}\) is created and \(v^s_{gt}=1\) when interval s is used. Each startup needs to have exactly one startup type:
The startup cost can then be defined as:
However, we can only use the startup type s if the time since the last shutdown is in the interval \([SI_s,SI_{s+1})\). This is formulated as follows:
Silbernagl et al. introduced additional analysis variables representing the temperature and ‘applied heat’ of a generator at every timestep. In that way the startup cost can be modeled even tighter which in turn provides a smaller integrality gap [58]. However, we did not include this into our model.
2.2.4 System Costs
At last, there is the cost of the system as a whole which is not attributable to individual generators. Most UC models include the possibility to not meet the demand at a penalty cost. This is modeled with a variable \(LL_t\) which stands for the lost load at time t with an associated cost being the Value Of Lost Load (VOLL). If this is not included in the model the model simply would be infeasible if there is an hour in which the demand is not met. For similar reasons a variable \(\gamma _t\), the loss of reserve at time t, and a penalty VOLR (Value Of Lost Reserve) can be added for hours in which the reserve requirements cannot be met. Note that \(VOLR < LL\). We now obtain
2.3 Thermal generator constraints
The power level range and flexibility properties (i.e. ability to ramp up or down, or startup or shutdown) of generators are modelled by thermal generator constraints.
2.3.1 Generation limits
Every electrical generator has a minimum and maximum power output. When a generator is on it must operate within this power range, and when it is off the power level is zero. Maximum power level is modeled by the following constraint:
Minimum power level is implied by our ‘above minimum power level variable’ formulation (2).
2.3.2 Tighter generation limits
Recently Knueven et al. [67] experimented with different formulations of the UC. One of their formulations was called tight and combined different constraints from the literature as well as novel ones. The idea is to provide more accurate generation bounds by combining start up, shut down and ramping limits. In our model variant, we implemented their additional constraints related to the maximum generation. These additional equations describe the same set of MILP solutions but the linear relaxation of this formulation may be better. The additional constraints are in the appendix.
2.3.3 Ramp up and down limits
The difference in power output levels between consecutive timesteps is constraint by ramping limits. These limits represent physical and economic constraints. If power output levels would change too fast, high temperature and pressure variations can lead to accelerated component failure and forced outages [76]. These limits can also be imposed by an insurance company as part of an insurance policy to prevent failure of components. Moreover, ramping limits are sometimes also modelled with a cost, the higher the difference the higher the price you pay.
The ramping limits are modeled for all two consecutive timesteps:
where \(RD_g\) is the maximum ramping down between two timesteps of unit \(g\) and \(RU_g\) is the maximum ramping up between two timesteps of unit \(g\).
When a unit is off it produces zero power. When a unit is on it must produce more than its minimum stable generation. Therefore, since the ramp up and ramp down limits could be smaller than the minimum stable generation, other ramping limits apply when the generator starts or stops, i.e. the startup SU and shutdown SD limits. The ramping constraints can be extended with these limits with the following elegant and tight formulation of Damci-Kurt et al. [77]:
2.3.4 Minimum up- and downtime
Because some generators cannot be started up or shut down arbitrarily in consecutive hours [78], minimum up- and downtime constraints are included in most models. The reasons why a generator cannot cycle arbitrarily, are related to physical limitations, safety and economics. Frequent cycling can have a huge effect on the wear and tear of a generator in the long term [76].
Pierre et al. [79], however, report the minimum downtime of most conventional generators to be almost non-existent. Huber argues that due to safety reasons a power plant should always be able to shut down [71] and therefore the minimum uptime constraint could possibly be ignored in the UC problem.
Rajan et al. [80] gives an efficient formulation for the minimum up- and downtime:
where \(UT_g\) is the minimum uptime of unit \(g\) and \(DT_g\) is the minimum downtime of unit \(g\).
2.4 Variable renewable energy and storage
Future power systems will rely more on VRES such as solar, wind, and run-off-river hydro power with the major downside that these sources are unpredictable and intermittent. Flexibility needs to be included in a power system to make the power system as reliable as a controllable thermal fleet. This is mostly done by introducing storage systems.
2.4.1 Storage constraints
Energy storage technology could include battery, compressed air, flywheel energy and pumped hydro storage.
They can be modeled with a minimum and maximum storage \(\underline{PE}, \overline{PE}\), an efficiency of charging \(\eta ^{c}\) and discharging \(\eta ^{d}\) and a maximum charging capacity \(\overline{PC}\), and a maximum discharging capacity \(\overline{PD}\) [68]. They are modelled by the following equations.
Pumped hydro storage can be modeled as a battery and a hydropower plant with a dam and reservoir as a battery that cannot be charged but has hourly inflow. However, hydro plants can also be modeled in more detail with constraints related to capacity bounds, flow equations, flow delay, ramp rate, turbine pumping compatibility and forbidden zones [7].
2.4.2 Variable Renewable Energy
VRES are modeled with time series of availability factors which indicate for each timestep the ratio of the maximum capacity at which the source can produce. Often in UC models it is assumed that VRES can be curtailed. The availability factors \(AF_{rt}\) of VRES r at time t can be implemented by the following constraint:
2.5 Power balance constraint
The power balance, also called supply-demand equilibrium or market clearing condition, is the essential UC constraint that models that every demand (at each location, region, bus, or node) should be met with equal supply at every timestep. When the power system consists of a single region (with only thermal generation) this can be modeled with the following equation:
where \(p'_{gt}\) is the dispatch of generator \(g\) at time \(t\) and \(D_t\) is the demand at time \(t\).
However, in a more complex power system with transmission every region or node has its own supply-demand equilibrium. The supply can additionally consist of VRES, discharge from batteries or pumped hydro storage, and nodal injections from the transmission system. The demand can also include the power needed for charging batteries or pumping water in a pumped hydro storage facility. This results in the following constraint:
where \(G_n\), \(R_n\) and \(S_n\) are the set of generators, VRES and storage units at node n. Where \(p_{gt}\) and \(pc_{st}\) is the dispatch or discharge of generator g, renewable energy source \(r\) or storage unit \(s\) and charge of storage unit \(s\) at time \(t\). Finally, \(D_{nt}\), \(inj_{nt}\) and \(LL_{nt}\) are the demand, nodal injection from the transmission grid and loss of load of node n at time \(t\).
2.6 Reserve constraints
The supply and demand of electricity are uncertain. Even when consumption and generation of electricity is known in one timestep, the power production and consumption within a timestep is not constant. Therefore, ancillary services are in place that ensure grid stability and security. In most literature of the UC, of the different types of ancillary services only spinning reserves are modelled. Spinning reserves are extra generation capacity that is available by increasing the power output of generators already connected to the power grid. However, it is often unclear what this “extra generation capacity” entails. The extra generation capacity is restricted by the difference of the maximum generation capacity and the actual generation. However, ramping limits also affect the available extra generation capacity. Moreover, the available extra generation capacity is limited by ramping limits plus the generation in the previous timestep. When a generator just used its maximum ramping capacity to go from the generation level in the previous timestep to the current generation level, it does not have extra capacity for the current timestep.
To model the spinning reserves an additional variable is included. The upward spinning reserve provided by generator g at time t is represented by \(r^{+}_{gt}\). Suppose \(SR_t\) is the spinning reserve requirement, and \(\gamma _t\) the amount by which the system fails to meet this requirement or so-called loss of reserve. Then the reserve requirement is modeled as:
When part of the capacity of a generator is used for spinning reserves, this cannot simultaneously be used for dispatch. Therefore, when spinning reserves are included in the UC model, constraint (14) is adjusted to:
The capacity a generator can provide as spinning reserve is also limited by its ramping limits.
Some authors [37, 51, 66] limit the reserve capacity by its ramp up limit but also take into account the generation from the previous timestep:
Even more ramping limits could be applied. Arroyo and Conejo [81] define the maximum generation \(\overline{p}_{gt}\) of a generator \(g\) at time t as:
With this definition generation limits, ramp up, startup and shutdown limits are respected. The reserve constraint of Morales et al. [66] also respects those limits. Ostrowski et al. [51] only include generation limits, ramp up and startup limits. In the tight model of Knueven et al. [67] ramp down limits are partly included.
2.7 Transmission constraints
Every element of the power system is connected to a power grid (the transmission system). The characteristics of the grid limit the power flow between supply and demand. The power grid is a complex network respecting physical laws. As noted by Ackooij et al. [7] transmission systems can typically be modeled at three levels of approximation: AC model, DC approximation, or copperplate. However, a simplified version of the DC approximation, namely the trade-based model, is also used [68]. The AC model based on all Kirchoff laws is usually not implemented in UC problems and is therefore not considered in this study. The associated non-linear and non-convex constraints of this transmission model already make the economic dispatch problem intractable.
2.7.1 DC model
The DC power flow model is widely used as a power flow model simplification in techno-economic studies related to electricity markets [82].
The DC model includes the topology of the grid and the capacities of the transmission lines but simulates the Kirchoff laws in a simplified and linearized way. This model assumes lossless transmission lines, a flat voltage profile and small voltage angles between neighboring nodes [82]. For real power flow these assumptions do not hold, but if the actual power characteristic violate these assumptions only a small amount then the overall error is also small [82]. The error on individual transmission lines however can be much larger and therefore the DC model should not be used to draw conclusions about individual lines [82, 83].
To incorporate DC power flows in the UC model, the nodes have positive, negative or zero network injection i.e. they are either an exporter or an importer.
where \(inj_{n t}\) is the amount of power node n draws from the transmission system at time t and \(f_{(n' \rightarrow n) t}\) is the power flow from node n to node \(n'\). the sum of all imports and exports over all nodes should be zero:
In the DC approximation, the flow on a line \(l= n\rightarrow n'\) is determined by the voltage angle difference of node \(n\) and \(n'\) times the susceptance \(B_{l}\) of the line:
At last, the flow on a transmission line l is restricted by its thermal capacity limits:
The difference in voltage angles between nodes solely determines the flow on the transmission line between them. Moreover, if we know the nodal injection of the transmission system then we do not need voltage angles to determine the power flow. In fact, a linear relationship exists between nodal injections and power flows on lines which can be described in a power transfer distribution factor (PTDF) matrix[83]. Thus two equivalent methods are available for DC power approximation in an UC model: one based on voltage angles and one based on a PTDF matrix.
A \(PTDF_{L\times N}\) matrix dictates how a power injection at node n influences the power flow at line l. We can now rewrite (35) to:
With the above formulation we can also choose to only model a subset of critical transmission lines.
Van den Bergh et al. [83] argue that using a linear DC grid model instead of a more accurate nonlinear AC grid model is justified, because the resulting error is smaller than the deviation between the power flows in the AC power flow simulation and the real power flows.
2.7.2 Trade-Based
In a trade-based model only constraints (33), (36) and (34) are used [68]. The transmission network is represented by a graph with nodes where power is generated and consumed and edges who represent power lines that can transmit power between nodes to compensate for the power imbalances at individual nodes.
2.7.3 Copperplate
In the literature a transmission system is often neglected in the UC models [68, 84]. Instead a copperplate is assumed in which everything is connected to one single bus and power flows between supply and demand are not limited by grid constraints.
2.8 Clustering
SometimesFootnote 2 similar generators are clustered to reduce the complexity of the UC model. Instead of individual generators with binary unit commitment variables \(u_{gt}\), the units are combined and have a single integer commitment variable \(u_{t}\) that keep track of the number of generators that are on at a specific moment. Most constraints can easily be changed from the binary case to the integer case (\(u_{gt}\) changes from \(\in \{0,1 \}\) to \(\in \{1\dots \text {number-of-units} \}\)). Only the ramping limits (15),(16),(30) and minimum up- and downtime (19),(20) need small adjustments [62]. However, generator clustering can introduce approximation errors. Meus et al. [62] showed that due to specific interactions of startup and shutdown limits combined with ramping limits and minimum up time, the flexibility may be overestimated when clustering identical generators.
2.9 Uncertainty
In this section we have presented a deterministic UC problem formulation, in which the patterns of demand, renewable energy supply, water inflow into the hydro reservoirs, and availability of generators are all known in advance. This is not the case in the real world and multiple methods have been proposed in the literature to account for the uncertainty of these entities.
One of these methods is robust optimization in which the solution must be feasible for all values of the input entities in a so-called uncertainty set. For example, the set of valid import and export patterns for nodes can depend on the outages of transmission lines. In robust optimization, an n-1 transmission system constraint can be included that enforces the import and export pattern to be valid in case of transmission outage of a single line [85].
Another method is Stochastic Programming in which usually the expected value of a UC solution is minimized [86]. This requires that the probability distribution over the uncertain scenarios is known, which is a strong assumption. A Stochastic Programming model contain 2 types of decision variables: 1) variables modelling the initial decisions and 2) recourse variables representing the decisions after the scenario has been revealed. For example, suppose many different renewable supply scenarios exist, where each scenario has a given probability. A solution to the stochastic UC problem could consist of two stages (other stochastic optimization variants exist). In the first stage one on/off pattern for each generator is determined that is valid for every renewable supply scenario. In the second stage, the power output of the generators is determined separately for each specific renewable supply scenario. Finally, the value of the objective function is a weighed (based on the probability) sum of objective values of all scenarios.
Other methods exist to deal with uncertainty in the UC: for example, by doing chance constraint optimization where some constraints only have to hold with a certain probability. Moreover, in the deterministic case, if the model includes reserve requirements, then this reserve constraint already account for the unpredictably and variability of uncertain elements in the UC [7]. See Ackooij et al. [7] for a more detailed explanation of research on how to deal with uncertainty in the UC problem. Finally, a deterministic UC can be combined with a Monte Carlo simulation to capture the variability of the scenarios when UC is used in a power system model.
We have decided for our experiments in this paper to focus on the impact of simplifications on solution quality and computation time on a deterministic optimization model of the UC problem. Main reason is that model simplifications are usually applied in large-scale power system modeling. Here the UC is performed on large power system models to evaluate the system adequacy of current and future electricity generation portfolios and to support investment decisions. The size of these models prohibits the use of a stochastic model, which would make the models and our study even larger.
3 Methods
In this study we applied 21 different formulations of the UC model on a benchmark set of 17 power system instances to assess the impact of different formulations on the result quality and computation time. The different formulations were obtained from a base model with all relevant power system constraints and a set of variations (mainly relaxations) of it. We solved these models with state-of-the-art software for solving large-scale MILP problems, namely, the commercial solver, Gurobi [87].
For each model we solved every instance with a time limit of 10 minutes and a MIP-gapFootnote 3 of 0.00001Footnote 4 and repeated every experiment 30 times with a slight perturbation of the electricity demand (uniform random within 1% of the total demand, at each timestep).
3.1 Instances
Table 2 presents an overview of all the power system instances that we collected from the literature. We used this benchmark of instances in our experiments and it is published onlineFootnote 5. An instance can contain the following items (Not every power system instance includes every item, see Table 2 for more details):
-
A set of generators specified with generation limits, ramping limits (including start and shutdown limits), minimum up- and downtime, generation cost (either linear or quadratic), startup cost (either time dependent or constant over time).
-
Time series of demand for each node, availability factors for renewable energy and hourly inflows for hydro.
-
Transmission system which includes a topology and lines characterized by susceptance and capacity.
-
A set of storage units with charge and discharge limits, charging and discharging efficiency and capacity.
-
Renewable Energy Sources with availability factors.
3.2 Experimental setup
We studied the following 21 models, each based on a MILP formulation. Table 3 gives an overview of the items included in each of the models and Table 4 shows which cost functions or constraints were used for modelling each of the items.
-
The base Model contains all relevant power system equations: it includes generation limits, minimum up- and downtimes, ramping limits, power balance, reserve requirements (set at 10% of total demand), transmission network model based on DC-approximation with PTDF matrix, transmission limits, linear approximation of the quadratic function and time-dependent startup cost. This base Model is used as the reference point for the other, mostly simpler, formulations.
-
\(Model^{Tight}\) is used to investigate how the addition of tight constraints to the base Model affect the computation time.
-
Seven models are designed to study the impact of simplifications of the base Model. \(Model_{LP}\) and \(Model_{LP}^{Tight}\) are the LP relaxation of Model and \(Model^{Tight}\) respectively, in which the binary requirements of the variables are relaxed. \(Model^{Ramp}\) and \(Model^{MUMD}\) are the base model without the ramping limits and minimum up- and downtime, respectively. In \(Model^{TDSUC}\)the time-dependent startup cost was replaced with a fixed startup cost. In \(Model^{Reserve}\) the reserve requirement was set to 0% instead of the normal 10% of the total demand. Finally, \(Model^{All}\) has no ramping limits, minimum up- and downtime, time-dependent startup cost and no reserve requirement.
-
In \(2\text {-}Model\) \(\dots\) \(10\text {-}Model\) the number of linear segments to approximate the quadratic cost function by a piece-wise linear function are varied from 2 to 10 in contrast with the base model with only one segment. These models are only applied to the 8 instances with a quadratic generation cost function.
-
In contrast to the DC-approximation with a PTDF matrix in the base Model, in \(Model^{Angles}\), \(Model^{Trade}\) and \(Model^{Copper}\) the transmission system is modeled with DC-approximation using volt angles, a trade- based approximation, and a copperplate assumption, respectively.
-
At last, in \({LL}\text {-}Model\), \({LL}\text {-}Model_{LP}\), \({LL}\text {-}Model^{Tight}\), and \({LL}\text {-}Model_{LP}^{Tight}\) the objective function is changed from cost minimization in the base model to energy not served minimization. The latter is relevant for adequacy studies in which only the occurrence of loss of load matters and not the costs [5, 6]. These 4 models further differ in whether or not a tight formulation or linear relaxation of binary variables were adopted. Furthermore, when these 4 models were applied to the instances in the benchmark set, all demands in these instances were increased to a level resulting in a 0.1% loss of load in the optimal solution. The reason is that the original demands would never result in a loss of load as the instances were all designed with sufficient generation capacity.
For the largest instances, D2SET1442 and ZUI1905, we used a clustered formulation, and these instances are only considered in the experiments with different transmissions constraints. Moreover, not every instance was used for every model variant because some instances do not have all the characteristics, only some have a transmission system, quadratic generation cost functions or time dependent start-up cost (Table 2).
3.3 Indicators to measure performance
To measure the impact of alternative UC formulations besides total computation time and speed-up factor in computation time, we choose 6 indicators related to the cost and solution properties of the UC solutions:
-
Cost-Gap. This Cost-Gap shows how much the total cost of a model differs from that of the Base model and is defined as
$$\begin{aligned} \text {Cost-Gap} =\frac{Z_{base} - Z_{relaxed}}{Z_{base}} \end{aligned}$$(38)where \(Z_{base}\) is the total cost of the best-found solution of the base model, and \(Z_{relaxed}\) is the total cost of the best-found solution of the relaxed model.
-
Quadratic-Gap. The Quadratic-Gap measures how much the piece-wise approximation of the generation cost function alters the generation cost by comparing it with the cost calculated with the quadratic cost function at the power levels in the solution found with the piece-wise approximation as cost function. This gap is defined as
$$\begin{aligned} \text {Quadratic-Gap} = \frac{Z_{Quadratic} - Z_{Base}}{Z_{Quadratic}} \end{aligned}$$Where \(Z_{Base}\) is the total cost of the best-found solution of the piece-wise linear model, and \(Z_{Quadratic}\) is the score of the same solution evaluated with the original quadratic generation cost.
-
Capacity factor difference. Every generator has a capacity factor that indicates how much a generator is used. This is relevant for power system studies that want to know whether a generator is economically viable. The capacity factor is 100%, if the generator is always producing at maximum capacity and it is lower otherwise. The capacity factor is defined as:
$$\begin{aligned} CF_g= \frac{\sum _{t \in T} p_{gt}}{ |T|\overline{P}_g} \end{aligned}$$The capacity factor difference is defined as \(|CF_g^{base} - CF_g^{relaxed}|\). The average capacity factor difference (ACFD) is defined as:
$$\begin{aligned} ACFD = \sum _{g \in G} \frac{|CF_g^{base} - CF_g^{relaxed}|}{|G|} \end{aligned}$$(39)here \(CF_g^{relaxed}\) of capacity factor of generator g for the relaxed model which is compared to the base model. The maximum capacity factor difference (MCFD) is defined as:
$$\begin{aligned} MCFD = \max _{g \in G} |CF_g^{base} - CF_g^{relaxed}|\end{aligned}$$For the capacity factor difference we only look at thermal generators and not solar, wind or hydro generators.
-
Normalized \(L_1\) norm of the commitment variables The hamming distance between two bit-strings is the number of positions at which the bits are different. However, in case binary constraints are relaxed, we cannot use the hamming distance, but must use the \(L_1\) norm. In this norm we only consider the commitment variables and define it as follows:
$$\begin{aligned} L_1 norm = \frac{\sum _{t \in T} \sum _{g \in G} |u_{gt}^{base} - u_{gt}^{relax}|}{ |G|} \end{aligned}$$Because we want to compare the \(L_1\) normof different power system instances, we normalize it by dividing by the total number of variables.
-
Constraint violation indicators The ramping limit violation indicator reports how many times the difference of two consecutive power outputs exceeds the imposed ramping limit. The up/down time violation constraint reports how many times a unit is illegally turned on or off at a timestep. Finally, the different transmission violation constraints report how often and in how many lines the line flow constraints are exceeded (36) if the configuration of import and export of nodes were modeled with a PTDF DC-approximation.
4 Results

a Computation time in seconds, b the speed-up factor, c the Cost-Gap, d MCFD, e ACFD and f \(L_1\)norm of the models of all the instances and 30 runs
Figure 3, and Table 5 provide a summary based on the aggregated results of 30 runs for all instances. More detailed figures can be found in the next subsections and appendix.
In Sect. 4.1 we present our results from the (tight) linear relaxation. Then, in Sect. 4.2.1 we show the ramping limits and reserve requirements relaxation. Subsequently, in Sect. 4.2.2 we present the results from omitting time dependent startup cost and removing minimum up- and downtime and in 4.2.3 we present the overall trends of all the model simplifications. Finally, in Sect. 4.3, 4.4 and 4.5 we present the results from the experiments with different numbers of segments for piece-wise approximation, different ways of transmission modeling, and the alternative objective function based on adequacy.
4.1 (Tight) linear relaxation
The base Model with the binary commitment variables is compared with \(Model_{LP}\) and \(Model_{LP}^{Tight}\) without the binary variables. We found that this relaxation results in a large speed-up while having a similar total cost. However, the solutions differ with respect to the capacity factor and fractional variable indicators.

Average computation time and average Cost-Gap for \(Model_{LP}\) and \(Model_{LP}^{Tight}\) for 15 different instances and 30 runs
Figure 3a, b show that the linear relaxation, \(Model_{LP}\) and \(Model_{LP}^{Tight}\), is solved, respectively, on average 32.2 and 25.5 faster than the base Model. The base Model cannot solve the instance KOR140 within the 10 minute time limit, while \(Model_{LP}\) solves it within 1.39 seconds on average. This is not surprising since the problem is convex and thus can be solved efficiently by Gurobi. Similarly, the computation time to solve \(Model_{LP}^{Tight}\) is significantly lower than the base Model and only a little higher than \(Model_{LP}\) (Fig. 4).
Figures 3c and 4 show the impact of the relaxation on the solution quality. The Cost-Gap is small for the binary relaxation (\(Model_{LP}\)) and even smaller for the tight binary relaxation (\(Model_{LP}^{Tight}\)). In all but one instance, the gap on average is below 1% and for one third of the instances it was below 0.1% for \(Model_{LP}^{Tight}\).
However, the capacity factor indicators can be large in both relaxations. For example, the instance OSTRO182 has an average ACFD of 6.4% and an average MCFD of 37.7% (Table 7). Thus on average a single generator uses the capacity 37.7% less or more in the relaxed model compared to the base Model.

Ratio of fractional variables of 30 runs for each instance
The boxplot in Fig. 5 shows that in more than half of the models the percentage of fractional variables is higher than 10% for \(Model_{LP}\) and \(Model_{LP}^{Tight}\). Fig. 5 suggest that a tight formulation can reduce this ratio considerably for some instances. For example, on average 32.4% of the binary variables are fractional when solving the instance RCUC50 with \(Model_{LP}\) compared to 23.9% with \(Model_{LP}^{Tight}\).
4.2 Impact of relaxations
4.2.1 Ramping limits and reserve requirements
Without the ramping limits, the UC problem can be solved on average 2.1 times faster, and even 10 times faster for one instance (see Fig. 14 in the appendix). Similarly, without the reserve requirements, the UC problem can be solved on average 1.9 times faster for all instances except for one instance, OSTRO182, which has a longer computation time (Fig. 6).

ACFD and MCFD for \(Model_{LP}\) and \(Model_{LP}^{Tight}\)
This decrease in computation time comes at the expense of the quality of the solutions. The Cost-Gap, ACFD and MCFD are all much larger than those of \(Model_{LP}\) and \(Model_{LP}^{Tight}\). For example, the Cost-Gap of \(Model^{Ramp}\) or the instances GA10 and KOR140 show that the total system costs are estimated respectively, 5.1% and 3.2% too low when ramping limits are not taken into account. The ACFD for \(Model^{Ramp}\) is as high as 12.2% and 8.3% for the instance GA10 and OSTRO182. The MCFD for these instances is 25.9% and 46.5%, respectively. The revenue of an individual generator could, therefore, be almost 50% higher or lower when the ramping constraints are omitted. Similar results can be found for the omission of reserve requirements (see appendix).

Ratio of ramping violations of 30 runs for each instance
Fig. 7 presents the number of times the ramping limits were violated in \(Model^{Ramp}\) which varies per instance between 0.1% and 10%. The highest is for the instance A110 where both ramp-up and ramp-down limits were exceeded on average for around 9% of the generators every timestep.
In summary, \(Model^{Ramp}\) and \(Model^{Reserve}\) and variants result in a significant speed-up at the cost of quality loss.
4.2.2 Minimum up- and down time and startup-costs
For \(Model^{TDSUC}\) and \(Model^{MUMD}\), where the time dependent startup cost or minimum up- and downtime constraints are removed, computation time is not clearly improved. In some cases, \(Model^{MUMD}\) even has a larger computation time (Fig. 3b).
However, the removal of those constraints still comes at a cost. When the minimum up- and downtime are removed, the Cost-Gap and the other quality measures are still high (Fig. 3c–e). The number of times the up-/downtime limits are violated is presented in Fig. 8. It varies per instance and is between 0% and 25%. For example, with the instance FER934 on average the minimum up and minimum downtime are exceeded in 3.3% and 23.4% of the time.

Ratio of minimum up/down time violations of 30 runs for each instance
4.2.3 Overall Trend
One of the reasons the UC is hard is because of the interdependency between time steps caused by generator properties like ramping limits, minimum up- and down time, and startup cost. If we were to remove this dependency the problem decomposes into easier subproblems.
As we can see from the results of \(Model^{All}\), if we remove most of this dependency, the solver is much faster Fig. 3a &b, but the solution quality also degrades the most as is shown by the Cost-Gap,ACFG,MCFD and \(L_1\)norm Fig. 3.
The ACFD but especially the MCDF are very large for all models (Fig. 3d &e), even when Model and \(Model^{Tight}\) are compared the MCFD is incredibly large. The base Model and \(Model^{Tight}\) have the same feasible search space and Gurobi returns cost values which are really close to each other (see Cost-Gap in Table 7). However, even if the cost difference of these solutions is very small the solutions themselves could be far apart. For example, on average the Cost-Gap is 0.01% for OSTRO182 but the MCFD is as high as \(40\%\).

Average computation time of 30 runs for the Base and Tight model for 15 different instances
The average computation time of the Model and \(Model^{Tight}\)model is almost the same for every instance. For some instances the tight formulation is noticeable faster on average but the converse is also true for two instances (Fig. 9).
4.3 Impact of resolution of piece-wise approximation
The experiments with piece-wise linear approximation show that for a single piece-wise linear, i.e. linear approximation, the Quadratic-Gap is already quite small ranging from 0.008% to 0.49 % (Fig. 10). When more pieces are added the Quadratic-Gap becomes even smaller but the time also increases significantly (Fig. 10). Although 0.5 % can be a lot of money in a larger system, it is important to note that the solutions for one piece and more pieces are similar and this similarity does not disappear when the number of pieces increases.
The other performance indicators of the models with more segments (see all indicators in Table 9 in the appendix) indicate that more segments hardly improve the quality of the solution compared to Model. For example, the Cost-Gap between one and two pieces in the piece-wise linear approximation on average is small \(<0.5\%\). But as shown in Fig. 10 additional segments increase the computation time considerably.

Quadratic-Gap and computation time of models with increasing number of pieces to approximate the Quadratic cost function
4.4 Impact of transmission modelling

The ACFD, MCFD, Cost-Gap and Constraint violation of 30 runs for \(Model^{Copper}\), \(Model^{Trade}\) and \(Model^{Angles}\)
The experiments with the 3 alternative transmission models show that computation time of the solution process can speed-up when normal DC approximation with PTDF is replaced by the trade-based or copperplate model. At the same time quality is lost, except for instances where transmission plays a limited role (Fig. 11 and appendix Table 10). For example, in the instances RTS26 and RTS96, the capacities of transmission lines are large in comparison with the demand. Furthermore, the demand size at the different nodes and location of generator capacity at these nodes agree sufficiently to avoid an overload of transmission lines. However, for the other instances this is not the case, and substantial quality loss is revealed by the scores of the performance indicators (see Fig. 13). Especially, the violation of the transmission constraints for more than 60% of the lines of all timesteps show that the simplifications is far from legitimate.
Using volt angles hardly differs from using PTDF when you look at the Cost-Gap, but the impact on the computation time differs as the use of volt angles is faster in some instances while the PTDF use is faster in others (Fig. 11).
4.5 Impact of alternative objective function
When using loss of load as cost function, there was no difference in the cost of the models with all system constraints, i.e., in every experiment \({LL}\text {-}Model\), \({LL}\text {-}Model^{Tight}\), \({LL}\text {-}Model_{LP}\) and \({LL}\text {-}Model_{LP}^{Tight}\) had the same cost. Moreover, the computation time was also similar (Table 6) . However, this does not imply the models are equal in general. UC is an NP-hard problem. Therefore it cannot be expected to be solvable by an LP and it is rather easy to find counter examples where the LP-relaxation, \({LL}\text {-}Model_{LP}\), gives a different optimal solution than \({LL}\text {-}Model\) even when minimzing loss of load.
5 Discussion
5.1 Implications of key findings and comparison with existing literature
We found a decrease in computation time when we omitted ramping limits, reserve requirements or a detailed transmission system, but at the same time a decrease in quality, i.e. a large deviation in cost and capacity factors. This is in line with findings from Schwele et al. [13] who developed a generation expansion planning model incorporating UC constraints and showed that without ramping constraints the optimization causes a large error. Knueven et al. [95] also found that omitting reserve requirements can shorten computation time as the inclusion of these requirements significantly increases the difficulty of solving UC problem. Palmintier [12] concluded that one of the most important aspects were reserve requirements but stated that ramping constraints are less important. This difference in conclusions, whether ramping limits play a significant role, highlights, how specific assumptions of the techno-economic characteristics of the power system influence the impact of the model simplifications. Poncelet et al. [14] also argued that the impact of integrating UC constraints in the generation expansion problem strongly depends on the flexibility parameters of the generators in the power system that is being modelled.
In contrast to the omission of constraints, linear relaxation always significantly improves computation time while the cost differ relatively little from the full model. However, the solution of this relaxed model will always be infeasible in the real world, due to the fractional commitment variables. But infeasibility, can be argued, holds for every model simplification. For certain applications in power system modeling the actual schedule is less important since the schedule is not always implemented, but only need to provide sufficient insight in the relevant properties of the schedule. Our analysis reveals that if the LP-relaxation has a certain cost value, we may expect that there exists a schedule with cost very close to that value. Therefore, using a linear relaxation could be a good approach to shave off a large amount of time while losing less quality than removing other aspects such as the ramping limits or reserve requirements. This is in line with findings from Palmintier [12] and Poncelet et al. [14], who both found that the LP relaxation of the full model results in a small deviation from the total system cost of the full MILP model when generation expansion with UC constraints is modelled.
We also found that for all model simplifications and even for equivalent tight model variants the capacity factor difference is always large. This is in line with the comments from Kim et al. which report that suboptimal generator schedules (even with small optimality gap) can deviate significantly from an optimal schedule [96]. This means that statements about individual generators, in terms of how much they produce and consequently how much they earn and whether they are economically viable, cannot be justified from a solution produced by an UC model.
We found that the linear approximation of the quadratic generation function with a single segment is already a good approximation for the quadratic functions in the UC instances we studied. This confirms the comments of Bruninx and Van den Bergh [73, 75] which stated that a linear approximation is already accurate given the quadratic functions found in the literature of the UC.
In all instances where we only minimized the loss of load the results of the full model and the linear relaxed model were equal. This finding has major implications for adequacy studies that use the UC problem to find the loss of load probability of current and future power systems [5, 6]. Most of the time these studies use a Monte Carlo approach, i.e. multiple UC problems are run, to get the expectation of the loss of load of a power system. For each run certain elements of the power system have forced outages and different demand patterns are drawn from a pool of different weather years. The ability to solve these UC problems faster without loss in quality means you can perform more Monte Carlo runs and get more accurate results.
Some studies first solve the UC problem for a whole year with a simplified model that omits most unit commitment constraints to fix certain variables such as storage levels and planned outages [1, 2, 11].Since, as was shown in this article, model simplifications and especially the removal of multiple constraints can cause errors, these errors can propagate to the shorter time horizons when modelling with a rolling horizon.
5.2 Limitations
We have performed multiple experiments with different models on a large variety of UC instances. Some of those instances are artificially created (RCUC50,RCUC200) while others are based on real power systems (HUB223,DSET). For others (GA10) it is not clear where the generators characteristics come from. Moreover, for some instances the characteristics such as storage technologies or VRES which we could include in our model, were not provided (Table 2). Furthermore, for some instances certain characteristics are irrelevant in the sense that they do not have an impact. For example, in the instances DSET, GLMC and FERC, most generators have ramping limits that are so large that a unit could go from is minimum to maximum generation within 1 hour, which makes the ramping constraint obsolete.
We only looked at a small time horizon of 24 timesteps. We did further investigation of the instances that finished within 10s and ran the same experiments for 168 timesteps. The results are roughly the same except for the measures MCFD, MIPGap and computation time, which where all higher. It still has to be investigated if these results still hold for larger time horizons of months to years but we see no reason why it would not scale. Although for some instances a larger time was were available (Table 2), we fixed the run length to a day. Most data sets had their start time in January (in the winter). For longer horizon instances the results could differ if we choose to start in another season where demand and renewable energy generation would be different.
In our experiments, we choose to perform an elaborate set of runs on an elaborate set of instances. Therefore, we could not calculate the optimum of every UC instance exactly within a reasonable computation time. We applied a state-of-the-art MILP formulation but even then, for almost half of the instances the time limit of 10 minutes was reached. Moreover, in order to do a reasonable amount of testing we terminated the branch and bound algorithm of Gurobi when a solution within the predefined MIPGap was reached. Therefore, calculating and comparing different solutions of the models introduced an inaccuracy since we were not able to compare optimal solutions.
In this paper all experiments were performed on a deterministic UC problem. In Sect. 2.9 we mentioned that uncertainty plays an important role in the UC. Besides looking at reserve requirements, uncertainty is not investigated in this article. This is a limitation of our study since inclusion or exclusion of uncertainty can play a large role in power system models A large-scale analysis of different approaches of including uncertainty (e.g. robust optimization, adjustable robustness, two-phase stochastic programming) and of the effect of model choices (objective functions, constraints) for the unit commitment with uncertainty would be a valuable addition to the literature of the UC. Note, however, that UC models with uncertainty can often be viewed as extensions of deterministic UC models. This might imply that the effect of model choices that are being studied in this article on a deterministic power system would have a similar effect on a non-deterministic power system.
6 Conclusion
We created a UC benchmark consisting of almost all available UC instances in the literature and representing power systems with a large variety of characteristics. We made this benchmark publicly available in a single format so that it can be used to evaluate the effectiveness of different algorithms and formulations of the UC in a robust way. In this study, we used this benchmark to compare the quality of solutions and computation times between a base UC model and variants of this model with less constraints. The base UC model is formulated as a MILP problem with generators characterized by a linear generation cost function, minimum up- and downtime, time dependent startup costs, and ramping limits. Furthermore, additional constraints guarantee sufficient reserves in the system and a DC approximation of the power flows is applied in the UC instances with transmission. Quality of the solutions were evaluated by comparing total system costs, capacity factors, and the number of times omitted constraints were violated in the relaxed models.
We found that some simplifications can speed-up solving the UC with no or only a small loss in quality. First, linear relaxation of the UC model, i.e. changing the MILP into an LP by relaxing the constraints that the commitment variables are binary, results in a significant speed-up, 32 times as fast on average, while having only a small cost gap. Moreover, the cost gap is even smaller when using a tighter formulation that contains additional inequalities for the maximum generation. The system cost gap for the tight linear relaxation for all instances except one was below 1% and for one third of the instances even below 0.1%. However, the actual schedule is not realistic, as the solution has fractional commitment decisions and when the solution is compared to the full model capacity factors of individual generators significantly differ. On average of 30 runs the average capacity factor difference of the generators for one instance was 6.4% and the maximum capacity factor difference was 37.7%. Secondly, when the objective is to minimize loss of load instead of total system cost the linear relaxation gave the same cost for ever UC instance and for every of the 30 runs. Thirdly, we found that the piece-wise linear approximation of the quadratic generation cost functions used in the literature of the UC, a single piece already gave good results. Adding more pieces reduced the gap between the real evaluation and the piece-wise linear approximation of the solution even more but at a significant computation time increase.
All other simplifications of the UC model are not recommended:
-
Omission of minimum up- and downtime mostly increased computation time and making start-up costs time-independent did not speed up the process, while both simplifications resulted in quality loss with regard to costs and differences in capacity factors.
-
Omission of ramping limits and reserve constraints result in a 2.1- and 1.9-times speed-up on average, but at the expense of too much quality loss. Without the ramping limits the total cost for one instance was 5% lower on average and the capacity factors differed on average 12.2%.
-
Although simplification of the transmission system may speed up the computation, quality loss with respect to the cost is too high. For one instance on average the total cost was 50% lower when transmission constraints were omitted.
Finally, we found that the average and maximum capacity factor difference is large for all model relaxations and even for the tight formulation, which is equivalent to the base model. These results imply that there are many different solutions with similar cost. This indicates that the actual generation pattern produced by the UC should not be considered as the unique way to achieve cost-efficient operation.
Notes
In our experiments only for the 2 largest instances.
\(\text {MIP-Gap} = \frac{bestbound - solution}{solution}.\)
This means the solves stop when it finds a solution and a lower bound that is only a factor 0.00001 apart from each other.
Abbreviations
- \(pc_{st}\) :
-
Amount of charging of storage unit s at time t
- \(pd_{st}\) :
-
Amount of discharging of storage unit s at time t
- \(p\prime _{gt}\) :
-
Power production of generator g at time t that is above the minimum generation
- \(p_{gt}\) :
-
Power output of generator g at time t
- \(p_{rt}\) :
-
Production of renewable energy source r at time t
- \(u_{gt}\) :
-
Commitment variable that is 1 when generator g is on at time t and 0 otherwise
- \(v_{gt}\) :
-
Start variable that is 1 when generator g starts at time t and 0 otherwise
- \(w_{gt}\) :
-
Stop variable that is 1 when generator g stops at time t and 0 otherwise
- \(S{C_{g}^{l}}\) :
-
Step-wise function of start-up cost of generator g after l timesteps since the generator has been turned off
- \(\bar{P}_g\) :
-
Maximum power output of generator g
- RDg:
-
Ramp down limit of generator g
- RUg:
-
Ramp up limit of generator g
- SDg:
-
Shutdown limit of generator g
- SUg:
-
Start-up limit of generator g
- P \(_g\) :
-
Minimum power output of generator g
- \(AT_{rt}\) :
-
Availability factor of renewable energy source r at time t
- \(DT_{g}\) :
-
Minimum downtime of generator g
- \(UT_{g}\) :
-
Minimum uptime of generator g
- \(\delta _{nt}\) :
-
Voltage angle of node n and time t used in an DC approximation
- \(\gamma _{t}\) :
-
Loss of reserve at time t
- \({r^{+}_{gt}}\) :
-
The spinning reserve generator g provides at time t
- \(f_{lt}\) :
-
Amount of power that flows on the transmission line l
- \(inj_{nt}\) :
-
Amount of power node n draws from the transmission system at time step t.
- \(LL_{t}\) :
-
Loss of load at time t
- \(SC_{gt}\) :
-
Cost of starting generator g at time t
- \(SR_{t}\) :
-
The spinning reserve requirement at time t
- \({v^{s}_{gt}}\) :
-
Start variable that is 1 when generator g at time t has a start-up of type s
- \(\bar{P}_{gk}\) :
-
Maximum power output of generator g at piece-wise linear segment k
- \(p_{gtk}\) :
-
Power output of generator g at time t at piece-wise linear segment k
- \(s_{gk}\) :
-
Slope of line segment k of the linear approximation of the cost function of generator g
- \(SI_{gs}\) :
-
Beginning of start-upcost interval s
- G :
-
Set of generators
- \(K_{g}\) :
-
Set of line segment of the linear approximation of the cost function of generator g
- L :
-
Set of indices of the transmission lines
- S :
-
Set of storage units
- T :
-
Set of timesteps
- \(\overline{f}_{l}\) :
-
Maximum flow on transmission line l
- f \(_{l}\) :
-
Maximum negative flow on transmission line l
- \(B_{l}\) :
-
Susceptance of transmission line l
- \(PTDF_{ln}\) :
-
Power transfer distribution matrix, a linear relation between the nodal injection on node n and the flow on transmission line l
- VOLL:
-
Value of lost load
- VOLR:
-
Value of lost reserve
- \({\eta ^{c}_{s}}\) :
-
Charge efficiency of storage unit s
- \({\eta ^{d}_{s}}\) :
-
Discharge efficiency of storage unit s
- \(\overline{PC}_{s}\) :
-
Maximum charging limit of storage unit s
- \(\overline{PD}_{s}\) :
-
Maximum discharging limit of storage unit s
- \(\overline{PE}_{s}\) :
-
Maximum energy of storage unit s
- PE \(_{s}\) :
-
Minimum energy of storage unit s
References
Pavičević, M., Mangipinto, A., Nijs, W., Lombardi, F., Kavvadias, K., Navarro, J.P.J., Colombo, E., Quoilin, S.: The potential of sector coupling in future European energy systems: soft linking between the dispa-set and jrc-eu-times models. Appl. Energy 267, 115100 (2020)
Zappa, W., Junginger, M., van den Broek, M.: Is a 100% renewable European power system feasible by 2050? Appl. Energy 233, 1027–1050 (2019)
van Zuijlen, B., Zappa, W., Turkenburg, W., van der Schrier, G., van den Broek, M.: Cost-optimal reliable power generation in a deep decarbonisation future. Appl. Energy 253, 113587 (2019)
Brouwer, A.S., van den Broek, M., Zappa, W., Turkenburg, W.C., Faaij, A.: Least-cost options for integrating intermittent renewables in low-carbon power systems. Appl. Energy 161, 48–74 (2016)
ENTSO-E: Pentalateral Energy Forum Support Group 2 Generation Adequacy Assessment (2018). https://www.bmwi.de/Redaktion/DE/Downloads/P-R/plef-sg2-generation-adequacy-assessment-2018.pdf?__blob=publicationFile &v=4
ENTSO-E: Mid Term Adequacy Forecast (MAF) (2018). https://docstore.entsoe.eu/Documents/SDC_20documents/MAF/2018/MAF_202018_20Executive_20Report.pdf
van Ackooij, W., Lopez, I.D., Frangioni, A., Lacalandra, F., Tahanan, M.: Large-scale unit commitment under uncertainty: an updated literature survey. Ann. Oper. Res. 1–75 (2018)
Saravanan, B., Das, S., Sikri, S., Kothari, D.: A solution to the unit commitment problem—a review. Front. Energy 7(2), 223–236 (2013)
Padhy, N.P.: Unit commitment-a bibliographical survey. IEEE Trans. Power Syst. 19(2), 1196–1205 (2004)
Melhorn, A.C., Li, M., Carroll, P., Flynn, D.: Validating unit commitment models: a case for benchmark test systems. In: Power and Energy Society General Meeting (PESGM), 2016, pp. 1–5. IEEE (2016)
Kavvadias, K., Hidalgo Gonzalez, I., Zucker, A., Quoilin, S.: Integrated modelling of future eu power and heat systems-the dispa-set v2. 2 open-source model. Technical report, European Commission (2018)
Palmintier, B.: Flexibility in generation planning: identifying key operating constraints. In: 2014 Power Systems Computation Conference, pp. 1–7. IEEE (2014)
Schwele, A., Kazempour, J., Pinson, P.: Do unit commitment constraints affect generation expansion planning? a scalable stochastic model. Energy Syst. 11(2), 247–282 (2020)
Poncelet, K., Delarue, E., D’haeseleer, W.: Unit commitment constraints in long-term planning models: relevance, pitfalls and the role of assumptions on flexibility. Appl. Energy 258, 113843 (2020)
Palmintier, B., Webster, M.: Impact of unit commitment constraints on generation expansion planning with renewables. In: 2011 IEEE Power and Energy Society General Meeting, pp. 1–7. IEEE (2011)
Poncelet, K., Delarue, E., Six, D., Duerinck, J., D’haeseleer, W.: Impact of the level of temporal and operational detail in energy-system planning models. Appl. Energy 162, 631–643 (2016)
Deane, J., Chiodi, A., Gargiulo, M., Gallachóir, B.P.Ó.: Soft-linking of a power systems model to an energy systems model. Energy 42(1), 303–312 (2012)
Turgeon, A.: Optimal scheduling of thermal generating units. IEEE Trans. Autom. Control 23(6), 1000–1005 (1978)
Wang, C., Shahidehpour, S.: Effects of ramp-rate limits on unit commitment and economic dispatch. IEEE Trans. Power Syst. 8(3), 1341–1350 (1993)
Kazarlis, S.A., Bakirtzis, A., Petridis, V.: A genetic algorithm solution to the unit commitment problem. IEEE Trans. Power Syst. 11(1), 83–92 (1996)
Huang, K.-Y., Yang, H.-T., Huang, C.-L.: A new thermal unit commitment approach using constraint logic programming. In: Power Industry Computer Applications., 1997. 20th International Conference On, pp. 176–185. IEEE (1997)
Orero, S., Irving, M.: Large scale unit commitment using a hybrid genetic algorithm. Int. J. Electrical Power Energy Syst. 19(1), 45–55 (1997)
Aganagic, M., Mokhtari, S.: Security constrained economic dispatch using nonlinear dantzig–wolfe decomposition. IEEE Trans. Power Syst. 12(1), 105–112 (1997)
Madrigal, M., Quintana, V.H.: An interior-point/cutting-plane method to solve unit commitment problems. In: Power Industry Computer Applications, 1999. PICA’99. Proceedings of the 21st 1999 IEEE International Conference, pp. 203–209. IEEE (1999)
Huse, E.S., Wangensteen, I., Faanes, H.H.: Thermal power generation scheduling by simulated competition. IEEE Trans. Power Syst. 14(2), 472–477 (1999)
Feltenmark, S., Kiwiel, K.C.: Dual applications of proximal bundle methods, including lagrangian relaxation of nonconvex problems. SIAM J. Optim. 10(3), 697–721 (2000)
Borghetti, A., Frangioni, A., Lacalandra, F., Lodi, A., Martello, S., Nucci, C., Trebbi, A.: Lagrangian relaxation and tabu search approaches for the unit commitment problem. In: 2001 IEEE Porto Power Tech Proceedings (Cat. No. 01EX502), 3, p. 7. IEEE (2001)
Fan, W., Guan, X., Zhai, Q.: A new method for unit commitment with ramping constraints. Electric Power Syst. Res. 62(3), 215–224 (2002)
Arroyo, J.M., Conejo, A.J.: A parallel repair genetic algorithm to solve the unit commitment problem. IEEE Trans. Power Syst. 17(4), 1216–1224 (2002)
Sum-Im, T., Ongsakul, W.: Ant colony search algorithm for unit commitment. In: IEEE International Conference on Industrial Technology, 2003, 1, pp. 72–77. IEEE (2003)
Borghetti, A., Frangioni, A., Lacalandra, F., Nucci, C.A.: Lagrangian heuristics based on disaggregated bundle methods for hydrothermal unit commitment. IEEE Trans. Power Syst. 18(1), 313–323 (2003)
Borghetti, A., Frangioni, A., Lacalandra, F., Nucci, C., Pelacchi, P.: Using of a cost-based unit commitment algorithm to assist bidding strategy decisions. In: 2003 IEEE Bologna Power Tech Conference Proceedings,, 2, p. 8. IEEE (2003)
Ongsakul, W., Petcharaks, N.: Unit commitment by enhanced adaptive lagrangian relaxation. IEEE Trans. Power Syst. 19(1), 620–628 (2004)
Fu, Y., Shahidehpour, M., Li, Z.: Long-term security-constrained unit commitment: hybrid dantzig-wolfe decomposition and subgradient approach. IEEE Trans. Power Syst. 20(4), 2093–2106 (2005)
Lu, B., Shahidehpour, M.: Unit commitment with flexible generating units. IEEE Trans. Power Syst. 20(2), 1022–1034 (2005)
Kumar, S.S., Palanisamy, V.: A new dynamic programming based hopfield neural network to unit commitment and economic dispatch. In: 2006 IEEE International Conference on Industrial Technology, pp. 887–892. IEEE (2006)
Carrión, M., Arroyo, J.M.: A computationally efficient mixed-integer linear formulation for the thermal unit commitment problem. IEEE Trans. Power Syst. 21(3), 1371–1378 (2006)
Chang, W., Luo, X.: A solution to the unit commitment using hybrid genetic algorithm. In: TENCON 2008-2008 IEEE Region 10 Conference, pp. 1–6 (2008). IEEE
Zhang, X., Zhao, J., Chen, X.: A hybrid method of lagrangian relaxation and genetic algorithm for solving uc problem. In: 2009 International Conference on Sustainable Power Generation and Supply, pp. 1–6. IEEE (2009)
Frangioni, A., Gentile, C., Lacalandra, F.: Tighter approximated milp formulations for unit commitment problems. IEEE Trans. Power Syst. 24(1), 105–113 (2009)
Tuohy, A., Meibom, P., Denny, E., O’Malley, M.: Unit commitment for systems with significant wind penetration (2009)
Yu, D., Wang, Y., Guo, R.: A hybrid ant colony optimization algorithm based lambda-iteration method for unit commitment problem. In: 2010 Second WRI Global Congress on Intelligent Systems, 1, pp. 19–22. IEEE (2010)
Dimitroulas, D.K., Georgilakis, P.S.: A new memetic algorithm approach for the price based unit commitment problem. Appl. Energy 88(12), 4687–4699 (2011)
Frangioni, A., Gentile, C., Lacalandra, F.: Sequential lagrangian-milp approaches for unit commitment problems. Int. J. Electrical Power Energy Syst. 33(3), 585–593 (2011)
Inostroza, J., Hinojosa, V.: Short-term scheduling solved with a particle swarm optimiser. IET Gen. Transmiss. Distribut. 5(11), 1091–1104 (2011)
Shafie-Khah, M., Moghaddam, M.P., Sheikh-El-Eslami, M.: Unified solution of a non-convex scuc problem using combination of modified branch-and-bound method with quadratic programming. Energy Conv. Manag 52(12), 3425–3432 (2011)
Guo, S.: A quick method for judging the feasibility of security-constrained unit commitment problems within lagrangian relaxation framework. Energy Power Eng 4, 432–438 (2012)
Chandrasekaran, K., Simon, S.P.: Binary/real coded particle swarm optimization for unit commitment problem. In: 2012 International Conference on Power, Signals, Controls and Computation, pp. 1–6. IEEE (2012)
Ostrowski, J., Wang, J.: Network reduction in the transmission-constrained unit commitment problem. Comput. Ind. Eng. 63(3), 702–707 (2012)
Wu, H., Guan, X., Zhai, Q., Ye, H.: A systematic method for constructing feasible solution to scuc problem with analytical feasibility conditions. IEEE Trans. Power Syst. 27(1), 526–534 (2012)
Ostrowski, J., Anjos, M.F., Vannelli, A.: Tight mixed integer linear programming formulations for the unit commitment problem. IEEE Trans. Power Syst. 27(1), 39–46 (2012)
Jabr, R.: Tight polyhedral approximation for mixed-integer linear programming unit commitment formulations. IET Gen. Transmiss. Distribut. 6(11), 1104–1111 (2012)
Chen, P.-H.: Two-level hierarchical approach to unit commitment using expert system and elite pso. IEEE Trans. Power Syst. 27(2), 780–789 (2012)
Morales-España, G., Ramos, A., García-González, J.: An mip formulation for joint market-clearing of energy and reserves based on ramp scheduling. IEEE Trans. Power Syst. 29(1), 476–488 (2014)
Rahman, D.F., Viana, A., Pedroso, J.P.: Metaheuristic search based methods for unit commitment. Int. J. Electrical Power Energy Syst. 59, 14–22 (2014)
Moradi, S., Khanmohammadi, S., Hagh, M.T., Mohammadi-ivatloo, B.: A semi-analytical non-iterative primary approach based on priority list to solve unit commitment problem. Energy 88, 244–259 (2015)
Frangioni, A., Gentile, C.: New MIP formulations for the single-unit commitment problems with ramping constraints. IASI-CNR (2015)
Silbernagl, M., Huber, M., Brandenberg, R.: Improving accuracy and efficiency of start-up cost formulations in mip unit commitment by modeling power plant temperatures. IEEE Trans. Power Syst. 31(4), 2578–2586 (2016)
Fattahi, S., Ashraphijuo, M., Lavaei, J., Atamtürk, A.: Conic relaxations of the unit commitment problem. Energy 134, 1079–1095 (2017)
Gentile, C., Morales-España, G., Ramos, A.: A tight mip formulation of the unit commitment problem with start-up and shut-down constraints. EURO J. Comput. Optim. 5(1–2), 177–201 (2017)
Atakan, S., Lulli, G., Sen, S.: A state transition mip formulation for the unit commitment problem. IEEE Trans. Power Syst. 33(1), 736–748 (2018)
Meus, J., Poncelet, K., Delarue, E.: Applicability of a clustered unit commitment model in power system modeling. IEEE Trans. Power Syst. 33(2), 2195–2204 (2018)
Alvarez, G.E., Marcovecchio, M.G., Aguirre, P.A.: Security-constrained unit commitment problem including thermal and pumped storage units: an milp formulation by the application of linear approximations techniques. Electric Power Syst. Res. 154, 67–74 (2018)
Shi, J., Oren, S.S.: Stochastic unit commitment with topology control recourse for power systems with large-scale renewable integration. IEEE Trans. Power Syst. 33(3), 3315–3324 (2018)
Knueven, B., Ostrowski, J., Wang, J.: The ramping polytope and cut generation for the unit commitment problem. INFORMS J. Comput. 30(4), 739–749 (2018)
Morales-España, G., Latorre, J.M., Ramos, A.: Tight and compact milp formulation of start-up and shut-down ramping in unit commitment. IEEE Trans. Power Syst. 28(2), 1288–1296 (2013)
Knueven, B., Ostrowski, J., Watson, J.P.: On mixed integer programming formulations for the unit commitment problem. E-print, Department of Industrial and Systems Engineering University of Tennessee, Knoxville, TN 37996 (2018)
Van den Bergh, K., Bruninx, K., Delarue, E., D’haeseleer, W.: Lusym: a unit commitment model formulated as a mixed-integer linear program. KU Leuven, TME Branch Working Paper 7 (2014)
Wood, A.J., Wollenberg, B.F.: Power Generation, Operation, and Control. John Wiley & Sons (2012)
Fraga, E.S., Yang, L., Papageorgiou, L.G.: On the modelling of valve point loadings for power electricity dispatch. Appl. Energy 91(1), 301–303 (2012)
Huber, M.: Flexibility in power systems-requirements, modeling, and evaluation. PhD thesis, Technische Universität München (2017)
Quoilin, S., Hidalgo Gonzalez, I., Zucker, A.: Modelling future eu power systems under high shares of renewables: the dispa-set 2.1 open-source model (2017)
Bruninx, K.: Improved modeling of unit commitment decisions under uncertainty (2016)
Zheng, Q.P., Wang, J., Pardalos, P.M., Guan, Y.: A decomposition approach to the two-stage stochastic unit commitment problem. Ann. Oper. Res. 210(1), 387–410 (2013)
Van den Bergh, K.: Impact of energy and climate policies on electricity generation-analysis based on large-scale unit commitment modeling (2016)
Van den Bergh, K., Delarue, E.: Cycling of conventional power plants: technical limits and actual costs. Energy Convers. Manag. 97, 70–77 (2015)
Damcı-Kurt, P., Küçükyavuz, S., Rajan, D., Atamtürk, A.: A polyhedral study of production ramping. Math. Programm. 158(1–2), 175–205 (2016)
Huang, Y., Pardalos, P.M., Zheng, Q.P.: Electrical Power Unit Commitment: Deterministic and Two-stage Stochastic Programming Models and Algorithms. Springer (2017)
Pierre, I., Bauer, F., Blasko, R., Dahlback, N., Dumpelmann, M., Kainurinne, K., Luedge, S., Opdenacker, P., Chamorro, I.P., Romano, D., et al.: Flexible generation: backing up renewables. Tech. Rep, Eurelectric (2011)
Rajan, D., Takriti, S., et al.: Minimum up/down polytopes of the unit commitment problem with start-up costs. IBM Res. Rep 23628, 1–14 (2005)
Arroyo, J.M., Conejo, A.J.: Optimal response of a thermal unit to an electricity spot market. IEEE Trans. Power Syst. 15(3), 1098–1104 (2000)
Purchala, K., Meeus, L., Van Dommelen, D., Belmans, R.: Usefulness of dc power flow for active power flow analysis. In: Power Engineering Society General Meeting, 2005. IEEE, pp. 454–459. IEEE (2005)
Van den Bergh, K., Delarue, E., D’haeseleer, W.: Dc power flow in unit commitment models. TMF Working Paper-Energy and Environment, Tech. Rep. (2014)
M, T., Van W, A., Frangioni, A., Lacalandra, F.: Large-scale unit commitment under uncertainty. 4OR 13(2), 115–171 (2015)
O’Neill, R.P., Hedman, K.W., Krall, E.A., Papavasiliou, A., Oren, S.S.: Economic analysis of the n-1 reliable unit commitment and transmission switching problem using duality concepts. Energy Syst. 1(2), 165–195 (2010)
Birge, J.R., Louveaux, F.: Introduction to stochastic programming (2011)
Gurobi Optimization, L.: Gurobi Optimizer Reference Manual (2019). http://www.gurobi.com
Park, J.-B., Jeong, Y.-W., Shin, J.-R., Lee, K.Y.: An improved particle swarm optimization for nonconvex economic dispatch problems. IEEE Trans. Power Syst. 25(1), 156–166 (2010)
Huber, M., Silbernagl, M.: Modeling start-up times in unit commitment by limiting temperature increase and heating. In: European Energy Market (EEM), 2015 12th International Conference on The, pp. 1–5 (2015). IEEE
Krall, E., Higgins, M., O’Neill, R.P.: Rto unit commitment test system
Barrows, C., Bloom, A., Ehlen, A., Ikaheimo, J., Jorgenson, J., Krishnamurthy, D., Lau, J., McBennett, B., O’Connell, M., Preston, E., et al.: The ieee reliability test system: a proposed 2019 update. IEEE Trans. Power Syst. (2019)
Wang, S., Shahidehpour, S., Kirschen, D.S., Mokhtari, S., Irisarri, G.: Short-term generation scheduling with transmission and environmental constraints using an augmented lagrangian relaxation. IEEE Trans. Power Syst. 10(3), 1294–1301 (1995)
Subcommittee, P.M.: Ieee reliability test system. IEEE Trans. Power Apparat. Syst. 6, 2047–2054 (1979)
Pandzic, H., Dvorkin, Y., Qiu, T., Wang, Y., Kirschen, D.S.: Unit commitment under uncertainty–GAMS models. Library of the Renewable Energy Analysis Lab (REAL), University of Washington, Seattle, USA. Online
Knueven, B., Ostrowski, J., Watson, J.-P.: A novel matching formulation for startup costs in unit commitment. Math. Program. Comput. 1–24 (2020)
Kim, K., Botterud, A., Qiu, F.: Temporal decomposition for improved unit commitment in power system production cost modeling. IEEE Trans. Power Syst. 33(5), 5276–5287 (2018)
Pan, K., Guan, Y.: A polyhedral study of the integrated minimum-up/-down time and ramping polytope (2016). arXiv preprint arXiv:1604.02184
Acknowledgements
This work is part of the research programme “Energie: Systeem Integratie en Big Data” with project number 647.003.005, which is financed by the Dutch Research Council (NWO).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendices
1.1 Additional tight constraints
We will briefly describe these constraints here but to get a better understanding of what the effect is of using different but equivalent formulations we recommend the article of Knueven et al. [67].
The following equations only hold for generators with a minimum up time of 1 denoted with \(G^1\). The maximum generation is limited by a combination of the startup and shutdown limit.
where \([\_]^+\) is defined as the maximum of 0 and the value within the brackets.
For the generators with a minimum up time larger than 1, \(G^{>1}\), we can limit the maximum generation with the startup limit plus the ramping limit times the number of timesteps the generator is on (\(i RU_g\) in the equation).
We can do something similar for the shutdown and ramp down limit:
where \(K^{SD_t}\) is the amount of timesteps to go from \(\overline{P}_g\) to \(SD_g\) at time t and \(K^{SU_t}\) is the amount of timesteps it takes to go from \(SU_g\) to \(\overline{P}_g\) at time t.
The inequalities of (40) and (41) come from Gentile et al. [60], (42) comes from Pan and Guan [97] and (43) and (44) are novel constraints from Kneuven et al. They all constrain the production level range reflecting the prolonged effect of ramping limits over multiple timesteps. For example, two timesteps after a generator has been started the total production level can never exceed \(SD_g + 2 RU\).
1.2 Additional figures and tables
See Figs. 12, 13, 14, 15, 16, 17, 18 and Tables 7, 8, 9, 10.

Average time in seconds of 30 runs for 15 instances and 9 models

Average time in seconds of 30 runs for 9 models and 15 instances

The geometric mean(because we are averaging ratio’s) of the speedup factor compared to the Base model for 6 models on 15 instances

Average Cost-gap compared to the Base model of 30 runs with the 8 models for 15 instances

Average Cost-gap compared to the Base model of 30 runs with the 8 models for 15 instances

Average ACFD of 30 runs with the 8 models for 15 instances

Average MCFD of 30 runs with the 8 models for 15 instances
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Wuijts, R.H., van den Akker, M. & van den Broek, M. Effect of modelling choices in the unit commitment problem. Energy Syst 15, 1–63 (2024). https://doi.org/10.1007/s12667-023-00564-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12667-023-00564-5