
Abstract
The linear canonical transform (LCT) plays an important role in signal and image processing from both theoretical and practical points of view. Various sampling representations for band-limited and non-band-limited signals in the LCT domain have been established. We focus in this paper on the derivative sampling reconstruction, where the reconstruction procedure utilizes samples of both the signal and its first derivative. Our major aim was to incorporate the reconstruction sampling operator with a Gaussian regularization kernel, which on the one hand is applicable for not necessarily band-limited signals and on the other hand hastens the convergence of the reconstruction procedure. The amplitude error is also considered with deriving rigorous estimates. The obtained theoretical results are tested through various simulated experiments.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The linear canonical transform (LCT) is a three-parameter transform
where a, b, d are fixed real constants and \(b\ne 0\). While the case \(b = 0\), cf. [7, 11, 13] can be also considered with a four-parameter transform, it is not of interest in this work as it is nothing but a chirp multiplication. Integration (1) converges for \(L^{p}({\mathbb {R}})\)-functions, \(p\ge 1\). For simplicity, we replace \(L_{a, b, d}\) by L and use the subscripts only when it is necessary. The LCT turns out to be the fractional Fourier transform (FrFT) when \(a=d=\cos \alpha \) and \(b=\sin \alpha ;\) to the Fourier transform when \(a=d=0, b=1\); and to the Fresnel transform when \(a=1, b\in {\mathbb {R}}, b\ne 0, d=0\), see [16, 26, 30, 31] for more details. For this reason, the LCT has become a basic tool in signal and image processing, cf., e.g., [7].
For the derivations of sampling theorems of Shannon type in the LCT domain, the space of band-limited signals in the LCT and FrFT domains is precisely investigated in [8, 14, 28, 30]. Sampling theorem of Shannon type has been derived extensively, see, e.g., [1, 3, 5, 6, 10, 11, 15, 19, 23, 24, 29], using different approaches. The associated truncation, amplitude, and jitter errors are analytically considered in [2, 3, 9, 22, 25].
The space of band-limited signals in the LCT domain is defined as follows. Let \(\Omega >0\) be fixed. A signal f is said to be band-limited with band width \(\Omega \) if \(f\in L^{2}({\mathbb {R}})\) and \((Lf)(t)=0, |t|>\Omega .\) This space is denoted by \(\mathbf {B}^{2}_{\Omega }.\) Thus, \(f\in \mathbf {B}^{2}_{\Omega }\) if and only if there is a band-limited signal in the classical sense with band width \(\Omega /b, \phi ,\) for which \(f(t)= e^{i(\frac{a}{2b})t^{2}} \phi (t)\). The derivative sampling theorem for \(f\in \mathbf {B}^{2}_{\Omega }\) is given in [11], see also [12], by
where \(h\in \left( 0, \frac{2\pi b}{\Omega }\right] \) is fixed and
The convergence of (2) is absolute on \({\mathbb {C}}\) and uniform on compact subsets of \({\mathbb {C}}\). See also [21, 27] for derivative sampling theorem in the FrFT domain.
The rate of convergence of (2) is slow, unless f decays fast. Our purpose in this work is to incorporate (2) with a Gaussian regularization kernel that hastens the reconstruction rate. In addition, we do not necessarily assume the reconstructed signals to be band-limited and/or to have a finite energy, i.e., square integrable. The regularized sampling theorem is derived in the next section. Section 3 is devoted to investigating the associated amplitude error, which results from using approximate samples in the reconstruction procedure. In Sect. 4, we carry out several numerical experiments.
2 Regularized Gaussian Sampling of Derivative Representation
For fixed \(x\in {\mathbb {R}}, \, N\in {\mathbb {N}}\), define the integer-type interval
where \(\lfloor \cdot \rfloor \) is the floor function, see Fig. 1.

\( {\mathbb {Z}}_{5}\left( \frac{1}{4}\right) =\{-5,-4,\cdots ,0,1,\cdots ,5\}\)
Let \(h \in \left( 0,\frac{2\pi b}{\Omega }\right) \), \(\alpha := \left( 2\pi - \frac{ h \Omega }{b} \right) /2\), \( a, b\in {\mathbb {R}}, b>0, N\in {\mathbb {N}}\) be also fixed. As we have indicated in the previous section, the reconstruction (convergence) rate of (2) is slow, unless f(t) decays fast. We incorporate (2) with the Gaussian function \(G(t)=e^{-t^2},\, t\in {\mathbb {C}},\) which decays fast as \( |t|\rightarrow \infty .\) Indeed, define the regularized Gaussian sampling of derivative representation operator for \(f:{\mathbb {C}}\rightarrow {\mathbb {C}}\) to be
For defining (5), no conditions are imposed on f, neither integrability nor analyticity. In the following, we estimate \(|f(t)- \left( \mathcal {H}_{h,N} f\right) (t)|\) for analytic functions with a prescribed growth. Let \(\varphi : [0,\infty )\rightarrow [0,\infty )\) be non-decreasing and \(E_{\Omega /b}(\varphi )\) denote the space of all entire functions f for which
The major result of this section is the following theorem, which gives an estimate of the error associated with (5).
Theorem 1
Let \(f\in E_{\Omega /b}(\varphi ), t=x+iy\in {\mathbb {C}},\, x,y \in {\mathbb {R}},\, |y|< N \). Hence,
where
locally uniformly on \({\mathbb {R}}\).
Proof
We may assume that \(\Omega /b < 2 \pi , \, h = 1,\) and \(y \ge 0\), cf. [4]. Let \(N_{0}:=N+1/2,\, m_{0}:=\lfloor x + 1/2\rfloor \), and \(\mathcal {C}_{N}\) be the positively oriented rectangle (more precisely the boundary of the rectangle) whose vertices are \( (\pm N_{0}+ m_{0}, y \pm N )\), see Fig. 2.

The rectangle \(\mathcal {C}_{4}\) for \(t= \frac{3}{2}+ i\)
For \(t=x + i y\in {\mathbb {C}},\, |y|<N\), consider the function
The residue theorem implies, \(t\notin {\mathbb {Z}},\)
Obviously,
Combining (11), (12), and (10) yields
In the case \(t = n \in {\mathbb {Z}}\), we have
Now, we estimate the integration
and \(c_{1}, c_{2}, c_{3},\) and \(c_{4}\) are the line segments \(\overline{AB},\) \( \overline{BC},\) \(\overline{CD},\) and \(\overline{DA}\), respectively, cf. Fig. 2. Let us estimate these four integrals. For \(I_1\), let \(\zeta =N_{0}+m_{0}+i \eta \in c_1\). Then,
To estimate \(I_1\), we estimate the integrand over \(c_1\). Inequality (6) implies
We also have
Since
then
Using the fact \(t-1<\lfloor t\rfloor \le t, \, t\in {\mathbb {R}}\) implies
Substituting from (22) and (23) in (21) yields
Using the estimate obtained by Schmeisser and Stenger for the last integral, cf. [20, p. 205], \(I_1\) is estimated via
In a similar manner, we estimate \(I_{3}\) to have
Let \(\zeta =\xi +i (y+N)\in c_2\), i.e., \(N_{2}\le \xi \le N_{1}\) where \( N_{2}=- N_{0}+m_{0} \). Then, \(I_{2}\) turns out to
Inequality (6) leads to
Moreover, we have
Hence,
The inequalities
and
imply
Likewise,
Combining (25), (26), (34), and (35) yields
where
The proof is completed as \(\lambda _N (\cdot )\) has the asymptotic (8) locally uniformly on \({\mathbb {R}}\).
Remark 1
The following special cases can be directly deduced from Theorem 1:
- (i):
-
Let f be entire, and there be \(M, \kappa \ge 0\) such that
 (38)
(38)For \(h \in \left( 0, \pi \left( \frac{\Omega }{b} + 2\kappa \right) \right) ,\) and \(| y| < N\), estimate (7) becomes
 (39)
(39)The proof is based on the fact that we can take \(\varphi (x)=M e^{\kappa x}\).
- (ii):
-
If \(f\in \mathbf {B}_{\Omega }^{\infty }\) (in the LCT domain), i.e.,
$$\begin{aligned} |f(x+iy)|\le \Vert f\Vert _{\infty } \,e^{\frac{a}{b} x y}\, e^{\frac{\Omega }{b} |y|}, \end{aligned}$$(40)then Theorem 1 implies
 (41)
(41) - (iii):
-
If \(f \in \mathbf {B}_{\Omega }^{2}\), then we have, cf. [18, p. 319], \(\Vert f\Vert _{\infty }\le \sqrt{\Omega /\pi b} \, \Vert f\Vert _2\) and consequently
 (42)
(42)




3 Amplitude error
The amplitude error associated with (5) arises if the exact samples f(nh), \(f^{\prime }(n h)\) are replaced by approximate closer ones \(\widetilde{f}(n h)\), \(\widetilde{f^{\prime }}(n h)\). Let \(\varepsilon _{n}:=f\left( n h\right) -\widetilde{f}\left( n h\right) \), \(\varepsilon ^{\prime }_{n}:=f^{\prime }\left( n h\right) -\widetilde{f^{\prime }}\left( n h\right) \) be uniformly bounded, i.e., there exists a sufficiently small \(\varepsilon > 0\), such that \( |\varepsilon _{n}|, |\varepsilon ^{\prime }_{n}|<\varepsilon \). The amplitude error is defined for \( t\in {\mathbb {R}}\) in this case to be

Theorem 2
Let \(f \in \mathbf {B}_{\Omega }^{\infty }\). Assume that \( |\varepsilon _{n}|, |\varepsilon ^{\prime }_{n}|<\varepsilon \). Then, we have for \(t\in {\mathbb {R}}\)

Proof
Let \(f \in \mathbf {B}_{\Omega }^{\infty }\) and \(t\in {\mathbb {R}}\). Using triangle inequality,

Since \(|\sin (t)|, |\mathrm {sinc\,}(t)|\le 1, \, e^{t}> 0,\, t\in {\mathbb {R}}\),

Simplifying (46), we obtain

Let \(\lfloor h^{-1} t + 1/2\rfloor -n = l\). Then,

Using the inequality, cf. [17],
we obtain
Likewise, letting \(\lfloor h^{-1} t + 1/2\rfloor -n = l\), then

Estimate (50) implies

Simple calculations and using inequality (49) yield

Hence,

The proof is accomplished by combining (50), (54), and (47). \(\square \)
4 Numerical experiments
This section includes two examples illustrating the above method. In the first example, we compare the results obtained by Gaussian regularization of derivative sampling in the LCT domain, which is investigated in this paper, with the derivative sampling theorem in the LCT domain \(f^D_N(t)\). Here, \(f^D_N(t)\) is the truncated reconstruction formula of (2), i.e.,

The other example is devoted to the comparison between the absolute error \(\left| f (t)- \left( \mathcal {H}_{h,N} \widetilde{f}\right) (t) \right| \) and its associated bound. Let \(\mathcal {B} (\mathcal {H}_{h,N}; t)\) and \(\mathcal {A} (\varepsilon , \mathcal {H}_{h,N}; t)\) be the error bounds of (41) and (44), respectively. For \(t\in {\mathbb {R}}\), \(N \in \mathbb {Z^{+}}\), we have

Since \( \left( \mathcal {H}_{h,N} f\right) (t)\) duplicates f(t) at the points kh for \(k\in {\mathbb {Z}}\), it looks reasonable to study the absolute errors at the intermediate points \(x_{k}:=\left( k-\frac{1}{2}\right) h\).
Example 1
Consider the \(B^{2}_{\pi /2}\)-function
where \(a=b=1/\sqrt{2},\; h=\sqrt{2},\) and \(\Omega =\pi /2\). Table 1 and Figs. 3–4 exhibit comparisons between the approximations of f using \(f_{N}^{D}(\cdot )\) and \(\left( \mathcal {H}_{h,N} f \right) (\cdot )\). In Fig. 3 we restrict ourselves to the case when \(N=2, t\in (-4,4)\) is real, while in Fig. 4 we illustrate the case when \(|t|<2, t\in {\mathbb {C}}, N=10\). It is noted from Table 1 that while the obtained error estimates are topping the absolute (exact) error, they are pretty close to the exact error. Moreover, the regularized Gaussian sampling of derivative representation is giving a more accurate reconstruction of signals than the derivative sampling theorem. Furthermore, as N increases, the gap between the exact error \(|f(\cdot )-\left( \mathcal {H}_{h,N} f\right) (\cdot )|\) and its bound narrows noticeably.

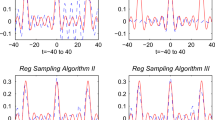
Illustrations associated with Example 1. Here \(t\in [-4,4]\). The green continuous lines in (a) and (b) are real parts of f(t), while the red dashed lines in (a) and (b) are real parts of \( f_{2}^{D}(t)\) and \(\left( \mathcal {H}_{\sqrt{2},2} f\right) (t)\), respectively. The green continuous lines in (c) and (d) are imaginary parts of f(t), while the red dashed lines in (c) and (d) are imaginary parts of \(f_{2}^{D}(t)\) and \(\left( \mathcal {H}_{\sqrt{2},2} f\right) (t)\), respectively

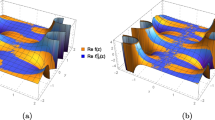
Approximations of (57) illustrated throughout the complex domain. Here, \(|t|<2\). The orange surfaces in (a) and (b) are real parts of f(t), while the blue surfaces in (a) and (b) are real parts of \(f_{10}^{D}(t) \) and \(\left( \mathcal {H}_{\sqrt{2}, 10} f\right) (t)\), respectively. The orange surfaces in (c) and (d) are imaginary parts of f(t), while the blue surfaces in (c) and (d) are imaginary parts of \(f_{10}^{D}(t) \) and \(\left( \mathcal {H}_{\sqrt{2}, 10} f\right) (t)\), respectively
Example 2
Consider the \(B^{\infty }_{\pi }\)-function
Here, \(a=1/2,\, b=\sqrt{3}/2,\, \Omega =\pi \). Tables 2, 3, and 4 demonstrate the absolute error \(\left| f (\cdot )- \left( \mathcal {H}_{h,N} \widetilde{f}\right) (\cdot ) \right| \) and its associated bound \(\mathcal {B}(\mathcal {H}_{h,N};\cdot )+\mathcal {A}(\varepsilon ,\mathcal {H}_{h,N};\cdot )\), where \(\varepsilon = 10^{-7}, N=5, 10\), and \(h =1, 1/2, 1/4\), respectively. We notice from Tables 2, 3, and 4 that, as predicted by the theory, the number of correct digits increases when N doubles. Moreover, the precision increases when N is fixed but h decreases, as expected in the over sampling case. Furthermore, the error bounds are quite realistic; that is, they do not overestimate the absolute error very much. Graphs of the real and imaginary parts of f(t) and \(\left( \mathcal {H}_{\frac{1}{2},10}\tilde{f}\right) (t)\) on the interval \([-4, 4]\) are exhibited in Fig. 5. It is noted from Fig. 5 that \(\left( \mathcal {H}_{\frac{1}{2},10}\widetilde{f}\right) (t)\) denoted by dashed line overlaps f(t) exactly, denoted by continuous line.

Illustrations associated with Example 2 where \(t\in [-4,4]\). (a) The blue continuous line is a real part of f(t), while the red dashed line is a real part of \(\left( \mathcal {H}_{\frac{1}{2},10}\widetilde{f}\right) (t)\). (b) The blue continuous line is an imaginary part of f(t) and the red dashed line is an imaginary part of \(\left( \mathcal {H}_{\frac{1}{2},10}\widetilde{f}\right) (t)\)
5 Conclusion
This paper regularizes the derivative sampling theorem for signals in the LCT domain through incorporating the reconstruction sampling representation with a carefully scaled Gaussian regularization kernel. The new sampling operator is applicable for band-limited and non-band-limited signals provided that analyticity and growth conditions are determined. The truncation and amplitude errors are precisely estimated. Numerical simulations have verified the efficiency of the proposed sampling theorem.
References
Annaby, M.H., Al-Abdi, I.A., Abou-Dina, M.S., Ghaleb, A.F.: Regularized sampling reconstruction of signals in the linear canonical transform domain. Signal Process. 198, 108569 (2022)
Annaby, M.H., Asharabi, R.M.: Error estimates associated with sampling series of the linear canonical transforms. IMA J. Numer. Anal. 35, 931–946 (2015)
Annaby, M.H., Asharabi, R.M.: Derivative sampling expansions for the linear canonical transform: convergence and error analysis. J. Comput. Math. 37(3), 431–446 (2019)
Asharabi, R.M., Prestin, J.: A modification of Hermite sampling with a Gaussian multiplier. Numer. Func. Anal. Opt. 36, 419–437 (2015)
Candan, C., Ozaktas, H.M.: Sampling and series expansion theorems for fractional Fourier and other transforms. Signal Process. 83, 1455–1457 (2003)
Erseghe, T., Kraniauskas, P., Carioraro, G.: Unified fractional Fourier transform and sampling theorem. IEEE Trans. Signal Process. 47, 3419–3423 (1999)
Healy, J.J., Kutay, M.A., Ozaktas, H.M., Sheridan, J.T.: Linear Canonical Transforms: Theory and Applications. Springer-Verlag, New York, NY, USA (2016)
Healy, J.J., Sheridan, J.T.: Cases where the linear canonical transform of a signal has compact support or is band-limited. Opt. Lett. 33, 228–230 (2008)
Huo, H., Sun, W.: Sampling theorems and error estimates for random signals in the linear canonical transform domain. Signal Process. 111(6), 31–38 (2015)
Lacaze, B.: About sampling for band-limited linear canonical. Signal Process. 91, 1076–1078 (2011)
Li, B.-Z., Tao, R., Wang, Y.: New sampling formulae related to linear canonical transform. Signal Process. 87(5), 983–990 (2007)
Liu, Y., Kou, K., Ho, I.: New sampling formulae for non-bandlimited signals associated with linear canonical transform and non linear Fourier atoms. Signal Process. 90(5), 933–945 (2010)
Moshinsky, M., Quesne, C.: Linear canonical transformations and their unitary representations. J. Math. Phys. 12(8), 1772–1783 (1971)
Oktem, F.S., Ozaktas, H.: Equivalence of linear canonical transform domains to fractional Fourier domains and the bicanonical width product: A generalization of the space-bandwidth product. J. Opt. Soc. Am. A 27, 1885–1895 (2010)
Ozaktas, H.M., Sumbul, U.: Interpolating between periodicity and discreteness through the fractional Fourier transform. IEEE Trans. Signal Process. 54, 4233–4243 (2006)
Pei, S.C., Ding, J.J.: Eigenfunctions of linear canonical transform. IEEE Trans. Acoust. Speech. Signal Process. 50, 11–26 (2002)
Pollak, H.D.: A remark on “Elementary inequalities for Mills’ ratio” by Yûsaku Komatu. Rep. Stat. Appl. Res. UJSE 4, 110 (1956)
Qian, L., Creamer, D.B.: A modification of the sampling series with a Gaussian multiplier. Sampl. Theory Signal Image Process. 5, 1–20 (2006)
Ran, Q.W., Zhao, H., Tan, L.Y., Ma, J.: Sampling of bandlimited signals in fractional Fourier transform domain. Circu. Syst. Signal Process. 29, 459–467 (2010)
Schmeisser, G., Stenger, F.: Sinc approximation with a gaussian multiplier. Sampl. Theory Signal Image Process. 6, 199–221 (2007)
Sharma, K.K.: Comments on Generalized sampling expansion for bandlimited signals associated with the fractional Fourier transform. IEEE Signal Process. Lett. 18(12), 761 (2011)
Shi, J., Liu, X., Yan, F.-G., Song, W.: Error analysis of reconstruction from linear canonical transform-based sampling. IEEE Trans. Signal Process. 66(7), 1748–1760 (2018)
Stern, A.: Sampling of linear canonical transformed signals. Signal Process. 86(7), 1421–1425 (2006)
Stern, A.: Sampling of compact signals in offset linear canonical transform domains. Signal Image Video Process. 1(4), 359–367 (2007)
Tao, R., Li, B.-Z., Wang, Y., Aggrey, G.K.: On sampling of band-limited signals associated with the linear canonical transform. IEEE Trans. Signal Process. 56, 5454–5464 (2008)
Tao, R., Qi, L., Wang, Y.: Theory and Applications of the Fractional Fourier Transform, Beijing. Tsinghua Univ. Press, China (2004)
Wei, D., Ran, Q., Li, Y.: Generalized sampling expansion for bandlimited signals associated with the fractional Fourier transform. IEEE Signal Process. Lett. 17(6), 595–598 (2010)
Xia, X.: On bandlimited signals with fractional Fourier transform. IEEE Signal Process. Lett. 3(3), 72–74 (1996)
Zayed, A.I., García, A.: New sampling formula for the fractional Fourier transform. Signal Process. 77, 111–114 (1999)
Zhao, H., Ran, Q., Ma, J., Tan, L.: On bandlimited signals associated with linear cannonical transform. IEEE Signal Process. Lett. 16, 343–345 (2009)
Zhao, H., Ran, Q.-W., Tan, L.-T., Ma, J.: Reconstruction of bandlimited signals in linear cannonical transform domain from finite nonuniformly spaced samples. IEEE Signal Process. Lett. 16, 1047–1050 (2009)
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Annaby, M.H., Al-Abdi, I.A. A Gaussian regularization for derivative sampling interpolation of signals in the linear canonical transform representations. SIViP 17, 2157–2165 (2023). https://doi.org/10.1007/s11760-022-02430-w
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11760-022-02430-w