
Abstract
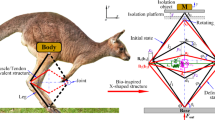
Inspired by Ostrich anti-vibration and shock and vibration absorption properties, a novel bio-inspired vibration isolation–absorption (BIVIA) system is presented to design wideband vibration isolation bandwidth, low-frequency/ultra-low-frequency vibration isolation and high stability using toe-leg-spine coupling structure. Considering the kinematic relationship between skeletons and muscle/tendon, the geometrical relationships and dynamical equations of the BIVIA system are deduced for theoretical analysis and model verification. The influences of different parameters on loading capacity, dynamic stability, quasi-zero stiffness (QZS) zone, vibration isolation–absorption performance and vibration transmissibility are discussed. It discovers that high loading capacity and extended QZS zone are achieved by coupled vibration isolation–absorption structures. Moreover, the desirable and adjustable vibration isolation–absorption performance of the BIVIA structure can be obtained by designing key parameters. The BIVIA structure presents a practical method for bio-inspired vibration isolation and could be used in engineering and manufacturing.













Similar content being viewed by others

Data availability
The data used to support the findings of this study are included in this article.
References
Dai, H.H., Jing, X.J., Wang, Y., Yue, X.K., Yuan, J.P.: Post-capture vibration suppression of spacecraft via a bio-inspired isolation system. Mech. Syst. Signal Pr. 105, 214–240 (2018)
Dai, H.H., Cao, X.Y., Jing, X.J., Wang, X., Yue, X.K.: Bio-inspired anti-impact manipulator for capturing non-cooperative spacecraft: theory and experiment. Mech. Syst. Signal Pr. 142, 106785 (2020)
Robertson, W.S., Kidner, M.R.F., Cazzolato, B.S., Zander, A.C.: theoretical design parameters for a quasi-zero stiffness magnetic spring for vibration isolation. J. Sound Vib. 326(1), 88–103 (2009)
Zhang, J.Z., Li, D., Dong, S.: An ultra-low frequency parallel connection nonlinear isolator for precision instruments. Key Eng. Mater. 257, 231–236 (2004)
Chen, X., Asce, H.T.Y.Y.M., Shan, J.Z., Hansma, P.K.: Bio-inspired passive optimized base-isolation system for seismic mitigation of building structures. J. Eng. Mech. 142(1), 04015061 (2016)
Yan, G., Zou, H.X., Zhao, L.C., Wu, Z.Y., Zhang, W.M.: Bio-inspired vibration isolation: methodology and design. Appl. Mech. Rev. 73, 020801 (2021)
Yang, T., Zhou, S.X., Fang, S.T., Qin, W.Y., Inman, D.J.: Nonlinear vibration energy harvesting and vibration suppression technologies: Designs, analysis, and applications. Appl. Phys. Rev. 8, 031317 (2021)
Deng, T.C., Wen, G.L., Ding, H., Lu, Z.Q., Chen, L.Q.: A bio-inspired isolator based on characteristics of quasi-zero stiffness and bird multi-layer neck. Mech. Syst. Signal Pr. 145, 106967 (2020)
Sun, X.T., Wang, F., Xu, J.: A novel dynamic stabilization and vibration isolation structure inspired by the role of avian neck. Int. J. Mech. Sci. 193(1), 106166 (2021)
Sun, X.T., Qi, Z.F., Xu, J.: A novel multi-layer isolation structure for transverse stabilization inspired by neck structure. Acta Mech. Sin. 38, 521543 (2022)
Liu, H.P., Xiao, K.L., Zhao, P.P., Zhu, D.M.: Theoretical and experimental studies of a novel nested oscillator with a high-damping characteristic. J. Vib. Control 27(13–14), 1479–1497 (2021)
Liu, G.Y., Zhao, P.P., Liu, H.P., Shen, H.X.: Study on performance of a novel high-damping vibration isolator with nested X-shaped structure. J. Hunan Univ. Nat. Sci. 48(2), 31–37 (2021)
Sun, X.T., Jing, X.J.: Analysis and design of a nonlinear stiffness and damping system with a scissor-like structure. Mech. Syst. Signal Pr. 66, 723–742 (2016)
Chai, Y.Y., Jing, X.J., Chao, X.: X-shaped mechanism based enhanced tunable QZS property for passive vibration isolation. Int. J. Mech. Sci. 218, 107077 (2022)
Wang, Y., Jing, X.J., Guo, Y.Q.: Nonlinear analysis of a bio-inspired vertically asymmetric isolation system under different structural constraints. Nonlinear Dyn. 95, 445–464 (2019)
Li, M.X., Jing, J.: A bistable X-structured electromagnetic wave energy converter with a novel mechanical-motion-rectifier: Design, analysis, and experimental tests. Energy Conver. Manage. 244, 114466 (2021)
Sun, B., Jing, X.J.: A tracked robot with novel bio-inspired passive “legs.” Robot. Biomim. 4, 18 (2017)
Jing, X.J., Zhang, L.L., Feng, X., Sun, B., Li, Q.K.: A novel bio-inspired anti-vibration structure for operating hand-held jackhammers. Mech. Syst. Signal Pr. 118, 317–339 (2019)
Wang, X., Yue, X.K., Dai, H.H., Yuan, J.P.: Vibration suppression for post-capture spacecraft via a novel bio-inspired Stewart isolation system. Acta Astronaut. 168, 1–22 (2020)
Niu, M.Q., Chen, L.Q.: Analysis of a bio-inspired vibration isolator with a compliant limb-like structure. Mech. Syst. Signal Pr. 179, 109348 (2022)
Ling, P., Miao, L., Zhang, W., Wu, C., Yan, B.: Cockroach-inspired structure for low-frequency vibration isolation. Mech. Syst. Signal Pr. 171, 108955 (2022)
Feng, X., Jing, X.J., Xu, Z.D., Guo, Y.Q.: Bio-inspired anti-vibration with nonlinear inertia coupling. Mech. Syst. Signal Pr. 124, 562–595 (2019)
Feng, X., Jing, X.J.: Human body inspired vibration isolation: Beneficial nonlinear stiffness, nonlinear damping & nonlinear inertia. Mech. Syst. Signal Pr. 117, 786–812 (2019)
Jiang, G.Q., Jing, X.J., Guo, Y.Q.: A novel bio-inspired multi-joint anti-vibration structure and its nonlinear HSLDS properties. Mech. Syst. Signal Pr. 138, 106552 (2020)
Zhou, S.Z., Liu, Y.L., Jiang, Z.Y., Ren, Z.H.: Nonlinear dynamic behavior of a bio-inspired embedded X-shaped vibration isolation system. Nonlinear Dyn. 110, 153–175 (2022)
Zhang, Y.F., Kong, X.R., Yue, C.F., Xiong, H.: Dynamic analysis of 1-dof and 2-dof nonlinear energy sink with geometrically nonlinear damping and combined stiffness. Nonlinear Dyn. 105, 167–190 (2021)
Taghipour, J., Dardel, M.: Steady state dynamics and robustness of a harmonically excited essentially nonlinear oscillator coupled with a two-DOF nonlinear energy sink. Mech. Syst. Signal Pr. 62, 164–182 (2015)
Yang, J., Xiong, Y.P., Xing, J.T.: Power flow behaviour and dynamic performance of a nonlinear vibration absorber coupled to a nonlinear oscillator. Nonlinear Dyn. 8(3), 1063–1079 (2015)
Shi, B.Y., Yang, J.: Quantification of vibration force and power flow transmission between coupled nonlinear oscillators. Int. J. Dyn. Control 8(2), 418–435 (2020)
Huang, D.M., Zhou, S.X., Han, Q., Litak, G.: Response analysis of the nonlinear vibration energy harvester with an uncertain parameter. P. I. Mech. Eng. K-J. Mul. 234(2), 393–407 (2020)
Huang, D.M., Li, R.H., Yang, G.D.: On the dynamic response regimes of a viscoelastic isolation system integrated with a nonlinear energy sink. Commun. Nonlinear Sci. 19, 104916 (2019)
Qian, F., Zuo, L.: Tuned nonlinear spring-inerter-damper vibration absorber for beam vibration reduction based on the exact nonlinear dynamics model. J. Sound Vib. 509, 116246 (2021)
Bian, J., Jing, X.J.: A nonlinear X-shaped structure based tuned mass damper with multi-variable optimization (X-absorber). Commun. Nonlinear Sci. 99, 105829 (2021)
Jiang, G.Q., Wang, Y., Li, F.M., Jing, X.J.: An integrated nonlinear passive vibration control system and its vibration reduction properties. J. Sound Vib. 509, 116231 (2021)
Song, X., Chai, Z., Zhang, Y., Zang, J., Xu, K.: Nonlinear vibration isolation via an innovative active bionic variable stiffness adapter (ABVSA). Nonlinear Dyn. 109, 353–370 (2022)
Yan, G., Zou, H., Wang, S., Zhao, L., Wu, Z., Zhang, W.M.: Bio-inspired toe-like structure for low-frequency vibration isolation. Mech. Syst. Signal Process. 162, 108010 (2022)
Song, Y., Zhang, C., Li, Z.L., Li, Y.: Study on dynamic characteristics of bio-inspired vibration isolation platform. J. Vib. Control 28(11–12), 1470–1485 (2022)
Funding
The project is supported by the Natural Science Foundation of China (No. 52275091), Natural Science Foundation of Liaoning Province (No. 2022-MS-125) and Fundamental Research Funds for the Central Universities (No. N2303011).
Author information
Authors and Affiliations
Contributions
SZ contributed to conceptualization, formal analysis, writing—original draft, and writing—review and editing. BH contributed to formal analysis. LZ involved in visualization. PX contributed to software. TY and ZR involved in investigation.
Corresponding author
Ethics declarations
Conflict of interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
Appendix B
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Zhou, S., Hou, B., Zheng, L. et al. Nonlinear property and dynamic stability analysis of a novel bio-inspired vibration isolation–absorption structure. Nonlinear Dyn 112, 887–902 (2024). https://doi.org/10.1007/s11071-023-09084-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-023-09084-4