
Abstract
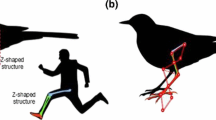
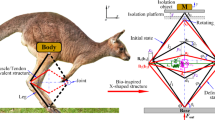
Inspired by the limb configuration of animals in their jumping and landing motions, a systematic investigation on the properties of a class of bio-inspired vertically asymmetric X-shaped (vaX) structures is carried out to explore the advantage of nonlinear characteristics in practical engineering. The nonlinear properties of two different vaX structures are studied under different constraint conditions. Formulations of the nonlinear vibration frequency and absolute displacement transmissibility of the structures are derived by the method of multiple scales. Considering practical conditions, three different constraints (i.e., (a) the same isolations height and assembling angle; (b) the same total rod length and assembling angle; (c) the same total rod length and isolation height) are summarized in this manuscript. Under these conditions, nonlinear properties including nonlinear vibration frequency, isolation performance and static stiffness are systematically discussed. Furthermore, the influences of the assembling pattern (i.e., normal and reverse assembling) on the isolation performance are investigated in detail. The results reveal that there exists rod-length ratio \(s_{1}\) such that the nonlinear frequency ratio of the vaX-I vibration system is lowest; the natural frequency of the vaX-I structure is independent of the assembling pattern; however, compared with the normally assembled vaX-I structure, a lower resonant peak of the transmissibility can be obtained for the reverse-assembled structure, which suggests that the nonlinear damping of the vaX-I structure is affected by the assembling pattern. Experiments are carried out to verify the influence of the assembling pattern on the natural frequency and isolation performance of the vaX structures.

























Similar content being viewed by others

References
Sun, W.C., Gao, H.J., Kaynak, O.: Adaptive back stepping control for active suspension systems with hard constraints. IEEE/ASME Trans. Mech. 18, 1072–1079 (2013)
Davis, L., Hyland, D., Yen, G., Dask, A.: Adaptive neural control for space structure vibration suppression. Smart Mater. Struct. 8, 753–766 (1999)
Pan, H.H., Sun, W.C., Gao, H.J., Jing, X.J.: Disturbance observer-based adaptive tracking control with actuator saturation and its application. IEEE Trans. Autom. Sci. Eng. 13, 868–875 (2016)
Pan, H.H., Sun, W.C., Gao, H.J., Yu, J.Y.: Finite-time stabilization for vehicle active suspension systems with hard constraints. IEEE Trans. Intell. Transp. Syst. 16, 2663–2672 (2015)
Liu, C.C., Jing, X.J., Steve, D., Li, F.M.: Recent advances in micro-vibration isolation. Mech. Syst. Signal Process. 56–57, 55–80 (2015)
Kovacic, I., Brennan, M.J., Waters, T.P.: A study of a nonlinear vibration isolator with a quasi-zero-stiffness characteristic. J. Sound Vib. 315, 700–711 (2008)
Ibrahim, R.A.: Recent advances in nonlinear passive vibration isolators. J. Sound Vib. 314, 371–452 (2008)
Rivin, E.I.: Passive Vibration Isolation. ASME Press, New York (2003)
Luo, Q., Li, D., Zhou, W., Jiang, J., Yang, G., Wei, X.: Dynamic modelling and observation of micro-vibrations generated by a Single Gimbal Control Moment Gyro. J. Sound Vib. 332, 4496–4516 (2013)
Robertson, W.S., Kidner, M.R.F., Cazzolato, B.S., Zander, A.C.: Theoretical design parameters for a quasi-zero stiffness magnetic spring for vibration. J. Sound Vib. 326, 88–103 (2009)
Wei, C.F., Jing, X.J.: A comprehensive review on vibration energy harvesting: modelling and realization. Renew. Sustain. Energy Rev. 73, 1–18 (2017)
Huang, X.C., Liu, X.T., Sun, J.Y.: Effect of the system imperfections on the dynamic response of a high-static-low-dynamic stiffness vibration isolator. Nonlinear Dyn. 76, 1157–1167 (2014)
Wu, Z.J., Jing, X.J., Bian, J., Li, F.M., Robert, A.: Vibration isolation by exploring bio-inspired structural nonlinearity. Bioinspir. Biomim. 10, 056015 (2015)
Lee, C.M., Goverdovskiy, V.N.: A multi-stage high-speed railroad vibration isolation system with “negative” stiffness. J. Sound Vib. 331, 914–921 (2012)
Liu, X.T., Huang, X.C., Hua, H.X.: On the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negative stiffness corrector. J. Sound Vib. 332, 3359–3376 (2013)
Sun, X.T., Jing, X.J., Xu, J., Cheng, L.: Vibration isolation via a scissor-like structured platform. J. Sound Vib. 333, 2404–2420 (2014)
Li, Z.C., Zhao, X.D.: New results on robust control for a class of uncertain systems and its applications to Chua’s oscillator. Nonlinear Dyn. 84(4), 1929–1941 (2016)
Wang, Y., Li, F.M., Wang, Y.Z., Jing, J.X.: Nonlinear responses and stability analysis of viscoelastic nanoplate resting on elastic matrix under 3:1 internal resonances. Int. J. Mech. Sci. 128–129, 94–104 (2017)
Wang, Y., Li, F.M., Wang, Y.Z.: Homoclinic behaviors and chaotic motions of double layered viscoelastic nanoplates based on nonlocal theory and extended Melnikov method. Chaos 25, 063108 (2015)
Sun, X.T., Jing, X.J.: Analysis and design of a nonlinear stiffness and damping system with a scissor-like structure. Mech. Syst. Signal Process. 66–67, 723–742 (2016)
Ding, H., Zhang, G.C., Chen, L.Q., Yang, S.P.: Forced vibrations of supercritically transporting viscoelastic beams. ASME J. Vib. Acoust. 134, 051007 (2012)
Jing, X.J., Lang, Z.Q., Billings, S.A., Tomlinson, G.R.: Frequency domain analysis for suppression of output vibration from periodic disturbance using nonlinearities. J. Sound Vib. 314, 536–557 (2008)
Zhou, J.X., Wang, X.L., Xu, D.L., Bishop, S.: Nonlinear dynamic characteristics of a quasi-zero stiffness vibration isolator with cam-roller-spring mechanisms. J. Sound Vib. 346, 53–69 (2015)
Jing, X.J., Lang, Z.Q.: Frequency domain analysis of a dimensionless cubic nonlinear damping system subject to harmonic input. Nonlinear Dyn. 58, 469–485 (2009)
Zhou, N., Liu, K.: A tunable high-static-low-dynamic stiffness vibration isolator. J. Sound Vib. 329, 1254–1273 (2010)
Hao, Z.F., Cao, Q.J., Wiercigroch, M.: Two-side damping constraint control strategy for high-performance vibration isolation and end-stop impact protection. Nonlinear Dyn. 86(4), 2129–2144 (2016)
Liu, C.C., Jing, X.J., Li, F.M.: Vibration isolation using a hybrid lever-type isolation system with an X-shape supporting structure. Int. J. Mech. Sci. 98, 169–177 (2015)
Zhang, Z., Aglietti, G.S., Zhou, W.: Microvibrations induced by a cantilevered wheel assembly with a soft-suspension system. AIAA J. 49, 1067–1079 (2011)
Carrella, A., Brennan, M.J., Waters, T.P., Shin, K.: On the design of a high-static-low-dynamic stiffness isolator using linear mechanical springs and magnets. J. Sound Vib. 315, 712–720 (2008)
EL-Sayed, A.T., Bauomy, H.S.: Vibration suppression of subharmonic resonance response using a nonlinear vibration absorber. ASME J. Vib. Acoust. 137, 024503 (2015)
Tian, R.L., Cao, Q.J., Li, Z.X.: Hopf bifurcations for the recently proposed smooth-and-discontinuous oscillator. Chin. Phys. Lett. 27(7), 074701 (2010)
Blob, R.W., Biewener, A.A.: Mechanics of limb bone loading during terrestrial locomotion in the green iguana (Iguana iguana) and American alligator (Alligator mississippiensis). J. Exp. Biol. 204, 1099–1122 (2001)
Sun, X.T., Jing, X.: A nonlinear vibration isolator achieving high-static-low-dynamic stiffness and tunable anti-resonance band. Mech. Syst. Signal Process. 80, 166–163 (2016)
Liu, C.C., Jing, X.J., Chen, Z.B.: Band stop vibration suppression using a passive X-shape structured lever-type isolation system. Mech. Syst. Signal Process. 68–69, 342–353 (2016)
Sun, X.T., Jing, X.: Multi-direction vibration isolation with quasi-zero stiffness by employing geometrical nonlinearity. Mech. Syst. Signal Process. 62–63, 149–163 (2015)
Arnold, V.I.: Mathematical Methods of Classical Mechanics, 2nd edn. Springer, Berlin (2012)
Marsden, J.E., Ratiu, T.S.: Introduction to Mechanics and Symmetry, 2nd edn. Springer, Berlin (2010)
Nayfeh, A.H., Mook, D.T.: Nonlinear Oscillations. Wiely, New York (1979)
Wang, Y., Li, F.M., Wang, Y.Z.: Nonlinear vibration of double layered viscoelastic nanoplates based on nonlocal theory. Physica E 67, 65–79 (2014)
Jing, X.J., Lang, Z.Q.: Frequency domain analysis and design of nonlinear systems based on volterra series expansion. A parametric characteristic approach. Springer, Switzerland, XV, 331p (2015). https://doi.org/10.1007/978-3-319-12391-2
Milovanovic, Z., Kovacic, I., Brennan, M.J.: On the displacement transmissibility of a base excited viscously damped nonlinear vibration isolator. J. Vib. Acoust. 131, 054502 (2009)
Acknowledgements
The authors appreciate the support from the General Research Fund of Hong Kong RGC (15206717) for this study.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Appendices
Appendix A
The symbol descriptions of the bio-inspired isolation system
Symbol | Structural parameters |
|---|---|
M | Mass of isolation object (kg) |
\(k_{l}\) | Stiffness of the horizontal spring (N m\(^{-1})\) |
\(c_{1}\) | Air damping coefficient (Ns m\(^{-1})\) |
\(c_{2}\) | Damping coefficient of friction in joints |
(Ns m\(^{-1})\) | |
n | Number of layers |
\(a_{1}\), \(b_{1}\), \( a_{2}\), \(b_{2}\) | Rod length (m) |
\(\varphi _{1}\), \(\varphi _{2}\) | Variation of the assembly angle (Rad) |
\(\alpha _{1}\), \(\alpha _{2}\) | Assembly angle (Rad) |
\(s_{1}\), \( s_{2}\) | Rod-length ratio |
The expressions of the nonlinear functions in Eq. (11) are expressed as:
Appendix B
The dimensionless variables in Eq. (12) are
where the expressions of the corresponding parameters are
Here, \(g_{ij} ={h_i^{(j)} }/{j!}\) are all complicated functions; \(g_{3i} \) is a complicated function of \( k_{l}\), \(\alpha _{1}\), \( a_{1}\), \(a_{2}\), \( b_{1}\), \( b_{2}\); \(g_{1i} \) is the function of \(c_{2}\), \(\alpha _{1}\), \( a_{1}\), \(a_{2}\), \( b_{1}\), \( b_{2}\); \(g_{2i} \) and \(g_{4i}\) are the functions of M, n, \(\alpha _{1}\), \( a_{1}\), \(a_{2}\), \( b_{1}\), \( b_{2}\), \(i= 0, 1, 2, 3\).
Appendix C
The explicit form for dimensionless natural frequency \(\omega _{2}\) of the vertical asymmetric structure can be expressed as
Then, for vaX-I structure (i.e., \(s_{2}=a_{2}/a_{1}=b_{2}/b_{1}=1\)), \(\omega _{2}\) can be written as
And for the reverse assembling pattern, the substitution of parameters can be \(\alpha _1 \rightarrow \alpha _2 \), \(s_1 \rightarrow 1/s_1 \). Hence, the expression of natural frequency for the reverse-assembled vaX-I structure can be written as
With the relationship of \(a_1 \cos \left( {\alpha _2 } \right) =b_1 \cos \left( {\alpha _1 } \right) \), Eq. (C.3) can also be expressed as the form of Eq. (C.2). Hence, this fact means that the same natural frequency of the vaX-I structure holds for different assembling patterns.
The natural frequency of the vaX-II structure (i.e., \(s_{1}=b_{1}/a_{1}=b_{2}/a_{2}=1\)) can be written as
And the natural frequency of vaX-II with reverse assembling pattern can be obtained by substituting \(s_2 \rightarrow 1/s_2 \) into Eq. C.4), which can be expressed as
Comparison of Eq. (C.4) with Eq. (C.5) illuminates the difference of the natural frequency of vaX-II structure between two assembling patterns.
Rights and permissions
About this article

Cite this article
Wang, Y., Jing, X. & Guo, Y. Nonlinear analysis of a bio-inspired vertically asymmetric isolation system under different structural constraints. Nonlinear Dyn 95, 445–464 (2019). https://doi.org/10.1007/s11071-018-4575-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4575-5