
Abstract
This work studies an elliptic boundary value problem with diffusive, advective and reactive terms, in a three-dimensional domain composed of two media separated by a selective interface. For the numerical approximation of the problem we propose a novel approach that combines, for the first time: (1) a dual mixed hybrid (DMH) finite element method (FEM) based on the lowest order Raviart–Thomas space (RT0); (2) a Three-Field formulation; and (3) a Streamline Upwind/Petrov–Galerkin (SUPG) stabilization method. After proving that the weak formulation of the proposed method and its numerical counterpart are both uniquely solvable and that the finite element scheme enjoys optimal convergence properties with respect to the discretization parameter, we present an efficient implementation based on static condensation, which reduces the method to a nonconforming finite element approach on a grid made by three-dimensional simplices. Extensive computational tests indicate that: (1) the theoretical convergence properties are verified; (2) the DMH-RT0 FEM is accurate and stable even in the presence of marked interface jump discontinuities in the solution and its associated normal flux; and (3) in the case of strongly dominating advective terms, the SUPG stabilization resolves accurately steep boundary and/or interior layers without introducing spurious unphysical oscillations or excessive smearing of the solution front.








Similar content being viewed by others
References
Addy, D., Pradas, M., Schmuck, M., Kalliadasis, S.: Diffuse-interface modelling of flow in porous media. In APS meeting abstracts, (2016)
Airoldi, P., Mauri, A.G., Sacco, R., Jerome, J.W.: Three-dimensional numerical simulation of ion nanochannels. J. Coupled Syst. Multiscale Dyn. 3(1), 57–65 (2015)
Amoroso, S.M., Monzio Compagnoni, C., Mauri, A., Maconi, A., Spinelli, A.S., Lacaita, A.L.: Semi-analytical model for the transient operation of gate-all-around charge-trap memories. IEEE Trans. Electron Devices 58(9), 3116–3123 (2011)
Arbogast, T., Chen, Z.: On the implementation of mixed methods as nonconforming methods for second- order elliptic problems. Math. Comput. 64(211), 943–972 (1995)
Arnold, D.N., Brezzi, F.: Mixed and nonconforming finite element methods: implementation, postprocessing and error estimates. Math. Model. Numer. Anal. 19(1), 7–32 (1985)
Bank, R.E., Bürgler, J.F., Fichtner, W., Smith, R.K.: Some upwinding techniques for finite element approximations of convection-diffusion equations. Numer. Math. 58(1), 185–202 (1990)
Brezzi, F., Fortin, M.: Mixed and Hybrid Finite Element Methods. Springer Series in Computational Mathematics, vol. 15. Springer, New York (1991)
Brezzi, F., Marini, L.D.: A three-field domain decomposition method. In: Quarteroni, A., Periaux, J., Kuznetsov, Y.A., Widlund, O.B. (eds.) Domain Decomposition Methods in Science and Engineering, pp. 27–34. American Mathematical Society, Providence (1994)
Brezzi, F., Marini, L.D.: Error estimates for the three-field formulation with bubble stabilization. Math. Comput. 70(235), 911–934 (2000)
Brooks, A.N., Hughes, T.J.R.: Streamline upwind/Petrov-Galerkin formulations for convection dominated flows with particular emphasis on the incompressible Navier–Stokes equations. Comput. Methods Appl. Mech. Eng. 32(1), 199–259 (1982)
Bustinza, R., Lombardi, A.L., Solano, M.: An anisotropic a priori error analysis for a convection-dominated diffusion problem using the HDG method. Comput. Methods Appl. Mech. Eng. 345, 382–401 (2019)
Cangiani, A., Natalini, R.: A spatial model of cellular molecular trafficking including active transport along microtubules. J. Theor. Biol. 267(4), 614–625 (2010)
Causin, P., Restelli, M., Sacco, R.: A simulation system based on mixed-hybrid finite elements for thermal oxidation in semiconductor technology. Comput. Methods Appl. Mech. Eng. 193(33–35), 3687–3710 (2004)
Ceric, H., Hoessinger, A., Binder, T., Selberherr, S.: Modeling of segregation on material interfaces by means of the finite element method. In: I. Troch, F. Breitenecker, (Eds). Proceedings 4th Mathmod Vienna, February 2003, pp. 139–145, (2003)
Chen, Huangxin, Li, Jingzhi, Qiu, Weifeng: Robust a posteriori error estimates for HDG method for convection-diffusion equations. IMA J. Numer. Anal. 36(1), 437–462 (2015). 03
Cockburn, B.: The hybridizable discontinuous Galerkin method. In Proceedings of the International Congress of Mathematicians, pp. 2749–2775, (2010)
Cockburn, B., Gopalakrishnan, J., Lazarov, R.: Unified hybridization of discontinuous Galerkin, mixed, and continuous Galerkin methods for second order elliptic problems. SIAM J. Numer. Anal. 47(2), 1319–1365 (2009)
Computation of local Pèclet number for anisotropic mesh. https://fenicsproject.org/qa/9171/computation-of-local-peclet-number-for-anisotropic-mesh
Crouzeix, M., Raviart, P.-A.: Conforming and nonconforming finite element methods for solving the stationary Stokes equations I. ESAIM: Math. Modell. Numer. Anal. Modél. Math. Anal. Num. 7(R3), 33–75 (1973)
Douglas, J., Roberts, J.E.: Global estimates for mixed methods for second order elliptic equations. Math. Comput. 44(169), 39–52 (1985)
Fraejis de Veubeke, B.M.: Displacement and equilibrium models in the finite element method. In: Zienkiewicz, O., Holister, G. (eds.) Stress Analysis, pp. 145–197. Wiley, New York (1965)
Farhloul, M., Fortin, M.: A new mixed finite element for the Stokes and elasticity problems. SIAM J. Numer. Anal. 30(4), 971–990 (1993)
Farhloul, M., Fortin, M.: Dual hybrid methods for the elasticity and the Stokes problems: a unified approach. Numer. Math. 76(4), 419–440 (1997)
Flemisch, B., Fumagalli, A., Scotti, A.: A Review of the XFEM-Based Approximation of Flow in Fractured Porous Media, pp. 47–76. Springer, Cham (2016)
Fortin, M., Mounim, A.S.: Mixed and hybrid finite element methods for convection-diffusion problems and their relationships with finite volume: the multi-dimensional case. J. Math. Res. 9(1), 68–83 (2017)
Fries, T.-P., Belytschko, T.: The extended/generalized finite element method: an overview of the method and its applications. Int. J. Numer. Methods Eng. 84(3), 253–304 (2010)
Gilbarg, D., Trudinger, N.S.: Elliptic Partial Differential Equations of Second Order, Classics in Mathematics. Springer, Berlin (2001)
Graham, B .P., van Ooyen, A.: Mathematical modelling and numerical simulation of the morphological development of neurons. BMC Neurosci. 7(Suppl 1), S1–S9 (2006)
Hron, J., Neuss-Radu, M., Pustějovská, P.: Mathematical modeling and simulation of flow in domains separated by leaky semipermeable membrane including osmotic effect. Appl. Math. 56(1), 51–68 (2011)
Hughes, T .J .R., Franca, L .P., Mallet, M.: A new finite element formulation for computational fluid dynamics: Vi. Convergence analysis of the generalized SUPG formulation for linear time-dependent multidimensional advective-diffusive systems. Comput. Methods Appl. Mech. Eng. 63(1), 97–112 (1987)
Huynh, L.N.T., Nguyen, N.C., Peraire, J., Khoo, B.C.: A high-order hybridizable discontinuous galerkin method for elliptic interface problems. Int. J. Numer. Methods Eng. 93(2), 183–200 (2013)
Kedem, O., Katchalsky, A.: Thermodynamic analysis of the permeability of biological membranes to non-electrolytes. Biochim. Biophys. Acta 27, 229–246 (1958)
Lee, S., Sundararaghavan, V.: Multi-scale modeling of moving interface problems with flux and field jumps: application to oxidative degradation of ceramic matrix composites. Int. J. Numer. Methods Eng. 85(6), 784–804 (2011)
Lions, J.L., Magenes, E.: Non-homogeneous boundary value problems and applications. Number v. 3 in non-homogeneous boundary value problems and applications. Springer, New York (1972)
Martin, V., Jaffré, J., Roberts, J.E.: Modeling fractures and barriers as interfaces for flow in porous media. SIAM J. Sci. Comput. 26(5), 1667–1691 (2005)
Mauri, A.G., Bortolossi, A., Novielli, G., Sacco, R.: 3D finite element modeling and simulation of industrial semiconductor devices including impact ionization. J. Math. Ind. 5, 1–18 (2015). https://doi.org/10.1186/s13362-015-0015-z
Mauri, A.G., Sacco, R., Verri, M.: Electro-thermo-chemical computational models for 3D heterogeneous semiconductor device simulation. Appl. Math. Modell. 39(14), 4057–4074 (2014)
Mauri, A.G., Sala, L., Airoldi, P., Novielli, G., Sacco, R., Cassani, S., Guidoboni, G., Siesky, B.A., Harris, A.: Electro-fluid dynamics of aqueous humor production: simulations and new directions. J. Model. Ophthalmol. 2, 48–58 (2016)
Onate, E., Manzan, M.: Stabilization techniques for finite element analysis of convection-diffusion problems. Technical report, International Center for Numerical Methods in Engineering (CIMNE), Barcelona, Spain. Publication CIMNE No-183 (2000)
Quarteroni, A., Valli, A.: Numerical Approximation of Partial Differential Equations. Lecture Notes in Mathematics. Springer, New York (1994)
Quarteroni, A., Valli, A.: Domain decomposition methods for partial differential equations. Clarendon Press, Numerical Mathematics Scientific Computation (1999)
Rao, V.S., Hughes, T.J.R.: On modelling thermal oxidation of silicon i: theory. Int. J. Numer. Methods Eng. 47(1–3), 341–358 (2000)
Rao, V.S., Hughes, T.J.R., Garikipati, K.: On modelling thermal oxidation of silicon ii: numerical aspects. Int. J. Numer. Method Eng. 47(1–3), 359–377 (2000)
Raviart, P.A., Thomas, J.M.: Dual finite element models for 2nd order elliptic problems. In: Glowinski, R., Rodin, E.Y., Zienkiewicz, O.C. (eds.) Energy Methods in Finite Element Analysis, pp. 175–191. Wiley, New York (1979)
Raviart, P.A., Thomas, J.M.: A mixed finite element method for second order elliptic problems I. In: Galligani, I., Magenes, E. (eds.) Mathematical Aspects of Finite Element Methods. Springer, Berlin (1977)
Roberts, J.E., Thomas, J.M.: Mixed and hybrid methods Part I. In: Ciarlet, P.G., Lions, J.L. (eds.) Finite Element Methods, vol. 2. North-Holland, Amsterdam (1991)
Roos, H.-G., Stynes, M., Tobiska, L.: Robust Numerical Methods for Singularly Perturbed Differential Equations, vol. 24. Springer, New York (2008)
Rutten, W.L.C.: Selective electrical interfaces with the nervous system. Ann. Rev. Biomed. Eng. 4, 407–452 (2002)
Sacco, R., Airoldi, P., Mauri, A.G., Jerome, J.W.: Three-dimensional simulation of biological ion channels under mechanical, thermal and fluid forces. Appl. Math. Modell. 43, 221–251 (2017)
Thomas, J.M.: Sur l’analyse numérique des mèthodes d’eléments finis hybrides et mixtes. Ph.D. thesis, Université Pierre et Marie Curie. Thése d’Etat (1977)
Weckx, P., Kaczer, B., Toledano-Luque, M., Grasser, T., Roussel, P.J., Kukner, H., Raghavan, P., Catthoor, F., Groeseneken, G.: Defect-based methodology for workload-dependent circuit lifetime projections-application to SRAM. In: Reliability Physics Symposium (IRPS), 2013 IEEE International, pp. 3A–4. IEEE, (2013)
Wills, G.B., Lightfoot, E.N.: Membrane selectivity. AIChE Journal 7(2), 273–276 (1961)
Wood, B.D., Quintard, M., Whitaker, S.: Calculation of effective diffusivities for biofilms and tissues. Biotechnol. Bioeng. 77(5), 495–516 (2002)
Wood, B.D., Whitaker, S.: Cellular growth in biofilms. Biotechnol. Bioeng. 64(6), 656–670 (1999)
Yakovlev, S., Moxey, D., Kirby, R.M., Sherwin, S.J.: To CG or to HDG: a comparative study in 3d. J. Sci. Comput. 67(1), 192–220 (2016)
Acknowledgements
The authors gratefully acknowledge the anonymous Reviewer for useful comments and suggestions. Giovanna Guidoboni has been partially supported by the Chair Gutenberg Funds of the Cercle Gutenberg (France), by the Labex IRMIA (University of Strasbourg, France) and by the award DMS 1853222/1853303 of the National Science Foundation (USA). Riccardo Sacco is a Member of the INdAM Research group GNCS and has been partially supported by Micron Semiconductor Italia S.r.l., statement of work #4505462139: “Modeling of tunneling and charging dynamics”, contractors: Micron Semiconductor Italia S.r.l.; Dipartimento di Matematica Politecnico di Milano, Italy.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
A Efficient Implementation of the DMH Method
A Efficient Implementation of the DMH Method
In this appendix, we illustrate how to implement the DMH-RT0 FEM (17) in a computationally efficient manner. To this end, we first discuss the properties of the linear algebraic system and then describe in detail the static condensation procedure that allows us to eliminate the internal variables \(u_i, {\mathbf {J}}_i\) and the Lagrange multipliers \({\mathcal {J}}_i\) in favor of \({\widehat{u}}_i\) and \(\lambda \), \(i=1,2\).
1.1 A.1 System Reduction Through Static Condensation
Functions belonging to the finite dimensional space \({\mathcal {V}}_h\) are completely discontinuous over \({\mathcal {T}}_h\). Similarly, functions belonging to the finite dimensional space \({\mathcal {Q}}_h\) are completely discontinuous over \({\mathcal {F}}_h\). These properties can be profitably exploited to implement the DMH-RT0 FEM in a very efficient manner through the use of static condensation. This procedure is basically a Gauss elimination algorithm that allows us to express all the variables of the numerical method as a function of a sole unknown, thereby reducing considerably the size of the linear algebraic system and enhancing the computational efficiency of the method. Static condensation, however, is not a feature specific of the DMH-RT0 FEM proposed in the present article, but is widely adopted in finite element formulations. We refer to [5, 7] for an introduction to static condensation in mixed and hybrid finite element methods, to [17, 55] for an advanced use of static condensation in the context of Continuous and Hybridizable Discontinuous Galerkin methods and to [41] for a description of the use of static condensation as an algorithm to implement the method of Schur complement system. To apply static condensation to the DMH FEM it is convenient to write the linear algebraic system associated with problem (17) in full block form, which reads:
In the equation system (40), \({\mathbf {J}}_i\), \({\mathbf {u}}_i\), \(i=1,2\), denote the vectors of the degrees of freedom for the internal variables \({\mathbf {J}}_h\) and \(u_h\) inside the partitioned triangulations \({\mathcal {T}}_{h,i}\), \(i=1,2\). In particular, denoting by \(\mathtt{NE}_1\) the number of tetrahedra in \({\mathcal {T}}_{h,1}\) and by \({\texttt {NE}}_2\) the number of tetrahedra in \({\mathcal {T}}_{h,2}\), we notice that \({\mathbf {J}}_1\) is subdivided into a collection of \({\texttt {NE}}_1\) vectors of size equal to 4 and \({\mathbf {u}}_1\) has size equal to \({\texttt {NE}}_1\); analogously, \({\mathbf {J}}_2\) is subdivided into a collection of \({\texttt {NE}}_2\) vectors of size equal to 4 and \({\mathbf {u}}_2\) has size equal to \({\texttt {NE}}_2\). In the same spirit, matrix \({\texttt {A}}_1\) has a block diagonal structure of size \({\texttt {NE}}_1\), where each block is the \(4 \times 4\) flux matrix corresponding to an element of \({\mathcal {T}}_{h,1}\), whereas matrix \({\texttt {A}}_2\) has a block diagonal structure of size \({\texttt {NE}}_2\), where each block is the \(4 \times 4\) flux matrix corresponding to an element of \({\mathcal {T}}_{h,2}\). Similar considerations apply to the rectangular block matrices \({\texttt {P}}_i\) and \({\texttt {N}}_i:= \mathtt{H}_i - {\texttt {P}}_i^T\), \(i=1,2\), and to the block matrices \({\texttt {R}}_i\), \(i=1,2\), that have a diagonal structure, each entry corresponding to an element of \({\mathcal {T}}_{h,1}\) and \({\mathcal {T}}_{h,2}\), respectively. The unknown vectors \(\widehat{{\mathbf {u}}}_i\), instead, contain the degrees of freedom of the hybrid variables \({\widehat{u}}_{h,i}\), \(i=1,2\), associated with each face of \({\mathcal {F}}_{h,i}\), \(i=1,2\), and for this reason the size of \(\widehat{{\mathbf {u}}}_1\) is equal to \({\texttt {NF}}_1\) and the size of \(\widehat{{\mathbf {u}}}_2\) is equal to \({\texttt {NF}}_2\), where \(\mathtt{NF}_1\) and \({\texttt {NF}}_2\) denote the number of faces in \({\mathcal {F}}_{h,1}\) and \({\mathcal {F}}_{h,2}\), the faces belonging to the interface \(\varGamma \) being counted twice. The unknown vectors \({\mathbf {j}}_i\), \(i=1,2\), contain the degrees of freedom of the flux Lagrange multipliers \({\mathcal {J}}_{h,i}\), \(i=1,2\), associated with each face of \({\mathcal {F}}_{h,\varGamma ,1}\) and \({\mathcal {F}}_{h,\varGamma ,2}\), respectively, and therefore their sizes are both equal to \({\texttt {NF}}_\varGamma \), where \({\texttt {NF}}_\varGamma \) denotes the number of faces in \({\mathcal {F}}_{h,\varGamma }\). Finally, the unknown vector \(\varvec{\lambda }\) contains the degrees of freedom of the segregation condition Lagrange multiplier \(\lambda _{h}\) associated with each face of \({\mathcal {F}}_{h,\varGamma }\), and therefore has size equal to \(\mathtt{NF}_\varGamma \). The matrices \({\texttt {D}}_i\), \(i=1,2\), enforce the continuity of \({\mathbf {J}}_{h,i} \cdot {\mathbf {n}}_i\) across interelement boundaries in each triangulation \({\mathcal {T}}_{h,i}\). The matrices \({\texttt {M}}_{\varSigma _i}\), \(i=1,2\), enforce the continuity of the Robin boundary boundary conditions (1e) on each face of \(\varSigma _i\). The matrices \({\texttt {E}}_i\), \(i=1,2\), enforce the identity between \({\mathbf {J}}_{h,i} \cdot {\mathbf {n}}_i\) and the Lagrange multiplier \({\mathcal {J}}_{h,i}\) across each face belonging to \({\mathcal {F}}_{h,\varGamma ,i}\), \(i=1,2\). The matrices \({\texttt {U}}_1\) and \({\texttt {U}}_2\) enforce the transmission condition (1c) across each face of \({\mathcal {F}}_{h,\varGamma }\) whereas the matrices \(-{\texttt {U}}_1^T\) and \(-\kappa {\texttt {U}}_2^T\) enforce the segregation condition (1d) across each face of \({\mathcal {F}}_{h,\varGamma }\). In analogy to what happens for the matrices associated with the internal degrees of freedom in each partitioned triangulation, also the matrices \({\texttt {D}}_i\), \(\mathtt{M}_{\varSigma _i}\), \({\texttt {E}}_i\) and \({\texttt {U}}_i\) have a block structure, each block corresponding to a face of \({\mathcal {F}}_{h,i}\), \(i=1,2\). To conclude, the right-hand side vectors \({\mathbf {b}}_i\), \({\mathbf {b}}_{\varSigma _i}\) and \({\mathbf {b}}_{\sigma }\), contain the contributions due to the source term g in (1a), of the boundary terms \(\beta _i\) in (1e) and of the interface flux term \(-\sigma \) in (1c), respectively.
1.1.1 A.1.1 Elimination of the Internal Variables \({\mathbf {J}}_h\) and \(u_h\)
The first and second equations in the block linear system (40) read:
whereas the third and fourth equations in the block linear system (40) read:
The two systems (41) and (42) have a local nature, that is, the unknown vector pairs \(({\mathbf {J}}_i, {\mathbf {u}}_i)\), \(i=1,2\), are associated with each tetrahedron K belonging to \({\mathcal {T}}_{h,1}\) and \({\mathcal {T}}_{h,2}\), respectively. In particular, we see that the \(4 \times 4\) flux matrices \({\texttt {A}}_i\), \(i=1,2\), are symmetric and positive definite, so that (41a) and (42a) can be solved to obtain:
Then, we can substitute the above expressions in (41b) and (42b) to get:
Letting
equations (44) become:
Matrices \({\texttt {M}}_i\) have size \(1 \times 1\) and are invertible because of assumption (9c). Thus, equations (45) can be solved to obtain:
We can plug expressions (46) back into (43) to obtain the following affine equations for the degrees of freedom of the dual variable associated with each element \(K \in {\mathcal {T}}_{h,i}\), \(i=1,2\):
where:
1.1.2 A.1.2 Elimination of the Interface Lagrange Multipliers \({\mathcal {J}}_{i,h}\), \(i=1,2\)
Restricting the fifth equation in the block linear system (40) to the faces belonging to \({\mathcal {F}}_{h,\varGamma ,1}\) yields
whereas the restriction of the sixth equation in the block linear system (40) to the faces that belong to \({\mathcal {F}}_{h,\varGamma ,2}\) yields
Since test functions \(\mu _h\) and approximate multipliers \({\mathcal {J}}_h\) belong to the same discrete space M(F) defined in (14c), equations (48a) and (48b) are uniquely solvable for each face F belonging to the interface \(\varGamma \), and give:
where \({\mathbf {J}}_1\) and \({\mathbf {J}}_2\) are given by (47). Also, since functions in the RT0 space (14a) satisfy the property
equations (48c) and (48d) assume the particularly simple form:
1.1.3 A.1.3 Elimination of the Hybrid Variables on the Interface \(\varGamma \)
The seventh equation in the block linear system (40) yields
whereas the eigth equation in the block linear system (40) yields
Using the same argument as for the variable \({\mathcal {J}}_h\), we see that equations (49) are uniquely solvable for each face F belonging to the interface \(\varGamma \), and give:
We notice that equations (50) allow to express the segregation condition (1d) in the DMH formulation in the same manner as in the 3F method.
1.1.4 A.1.4 Construction of the Linear Algebraic System
Having expressed the internal variable \({\mathbf {J}}_h\) in favor of the hybrid variable \({\widehat{u}}_h\), the Lagrange multiplier \({\mathcal {J}}_h\) in favor of \({\mathbf {J}}_h\) on \(\varGamma \) and the hybrid variable \({\widehat{u}}_h\) in favor of the Lagrange multiplier \(\lambda _h\) on \(\varGamma \), we proceed as follows:
- (step a)
we use the fifth equation in the block linear system (40) to enforce the interelement continuity of \({\mathbf {J}}_{1,h} \cdot {\mathbf {n}}_{1}|_F\) at each \(F \in {\mathcal {F}}_{h,int,1}\) and the boundary condition (1e) at each \(F \in {\mathcal {F}}_{h,\varSigma ,1}\).
- (step b)
we use the sixth equation in the block linear system (40) to enforce the interelement continuity of \({\mathbf {J}}_{2,h} \cdot {\mathbf {n}}_{2}|_F\) at each \(F \in {\mathcal {F}}_{h,int,2}\) and the boundary condition (1e) at each \(F \in {\mathcal {F}}_{h,\varSigma ,2}\);
- (step c)
we use the ninth equation in the block linear system (40) to enforce the transmission condition (1c) at each \(F \in {\mathcal {F}}_{h,\varGamma }\).
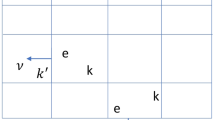
A graphical representation of each of the above three steps is shown in Fig. 9.

Interelement continuity of \({\mathbf {J}}_{h} \cdot {\mathbf {n}}|_F\). Left panel: \(F = \partial K_1 \cap \partial K_2\) (internal face). Right panel: \(F = \partial K_1 \cap \varSigma \) (boundary face). The arrows represent the degree of freedom of \({\mathbf {J}}_h|_{K_i}\) associated with face F of element \(K_i\), \(i=1,2\) (left panel) and \(i=1\) (right panel). In the case where F is a boundary face the role of \({\mathbf {J}}_h|_{K_2} \cdot {\mathbf {n}}\) is played by the Robin boundary condition \(\alpha u - \beta \)
The application of the sequence of steps (a), (b) and (c) leads to the construction of the following linear reduced system for the DMH-RT0 FEM
where \({\mathbf {U}}\in {\mathbb {R}}^{\texttt {NF}}\) is the vector of degrees of freedom represented by the values of \({\widehat{u}}_h\) on each face of \({\mathcal {F}}_h\), excluding those belonging to \(\varGamma \), and the values of \(\lambda _h\) on each face belonging to \(\varGamma \), \({\texttt {K}} \in {\mathbb {R}}^{{\texttt {NF}} \times {\texttt {NF}}}\) is the stiffness matrix and \({\mathbf {t}} \in {\mathbb {R}}^{{\texttt {NF}}}\) is the load vector, with NF denoting the number of faces of \({\mathcal {F}}_h\). Each equation in (51) can be written in explicit form as
where \({\texttt {Adj}}(F)\) denotes the set of faces \(G \in {\mathcal {F}}_h\) that have a vertex in common with the closure of F. We notice that each row of system (51) corresponding to an internal face F has 7 nonzero entries (cf. Fig. 9, left panel) whereas each row of system (51) corresponding to a boundary face F has 4 nonzero entries (cf. Fig. 9, right panel).
Remark 6
The unique solvability of (51) is a consequence of Theorem 2.
Remark 7
The assembly of the stiffness matrix \({\texttt {K}}\) and of the load vector \({\mathbf {t}}\) in (51) can be conducted as in a standard displacement-based computer code using piecewise linear finite elements for the approximation of the primal variable u. In particular, a for loop is performed over the elements \(K \in {\mathcal {T}}_h\) and for each element the local\(4 \times 4\) stiffness matrix \({\texttt {L}}_i^K\) and the local\(4 \times 1\) load vector \({\mathbf {t}}_i^K=-{\mathbf {b}}_i^K\), \(i=1,2\), are computed using (47). Then, the assembly phase consists of the following Matlab coding:

In the above code, K indicates the global index of element K in the mesh structure, Lel is the connectivity matrix such that Lel(K,i), i=1,2,3,4 contains the global index of the face of K locally numbered by i. In addition, GlobStiffMat and GlobLoadVec are the global stiffness matrix and global load vector, respectively, whereas LocStiffMat and LocLoadVec are their local counterparts. We notice that the assembly in the DMH-RT0 FEM is performed on a face-oriented basis, whereas in the standard FEM the assembly is performed on a vertex-oriented basis.
1.1.5 A.1.5 Post-processing
Once the reduced system (51) is solved, the values of \({\widehat{u}}_h\) on each face of \({\mathcal {F}}_{h,\varGamma ,i}\), \(i=1,2\), can be computed by means of (50). Then, the internal variables \({\mathbf {J}}_h\) and \(u_h\) are recovered using (47) and (46) over each \(K \in {\mathcal {T}}_h\).
Rights and permissions
About this article

Cite this article
Sacco, R., Mauri, A.G. & Guidoboni, G. A Stabilized Dual Mixed Hybrid Finite Element Method with Lagrange Multipliers for Three-Dimensional Elliptic Problems with Internal Interfaces. J Sci Comput 82, 60 (2020). https://doi.org/10.1007/s10915-020-01163-7
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10915-020-01163-7