
Abstract
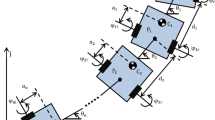
In this paper a Pfaff matrix for doubly generalized N-trailer systems is derived when not only lateral, as in generalized N-trailer systems, but also longitudinal constraints are respected. Based on the matrix, kinematic models are presented for doubly generalized N-trailer systems parameterized with a vector composed of codes of active constraints at each axle. For all constraints active, a closed-form formula for kinematics is derived while for other models – a recursive one is proposed. It is shown how to construct analytically a null space for two types of possible Pfaff matrices and some examples are provided to illustrate introduced formulas. The kinematic models can be used either to test algorithms of motion planning (control) for a broad class of easy parameterizable models or to design or verify wheeled systems.
Article PDF
Similar content being viewed by others

Avoid common mistakes on your manuscript.
References
Altafini, C.: Some properties of the general N-trailer. Int. J. Control. 74(4), 409–424 (2001)
Bayle, B., Renaud, M., Fourquet, J.Y.: Nonholonomic mobile manipulators: kinematics, velocities and redundancies. J. Intell. Robot. Syst. 36(1), 45–63 (2003)
Bicchi, A., Marigo, A.: Dexterous grippers: putting nonholonomy to work for fine manipulation. Int. J. Robot. Res. 21(5–6), 427–442 (2002)
Bryant, J., Sangwin, C.: How Round is Your Circle. Where Engineering and Mathematics Meet. Princeton University Press, Princeton (2005)
Chow, W.L.: Über Systeme von linearen partiellen Differentialgleichungen erster Ordnung. Math. Ann. 117 (1), 98–105 (1939)
Duleba, I.: Algorithms of Motion Planning for Nonholonomic Robots. Publ. House of Wroclaw Univ of Technology (1998)
Fliess, M., Rouchon, P., Lévine, J., Martin, P.: Flatness, motion planning and trailer systems. In: 1993 IEEE Conference on Decision and Control (CDC), pp. 2700–2705, San Antonio (1993)
Nakamura, Y., Savant, S.: Nonholonomic motion control of an autonomous underwater vehicle. In: IEEE/RSJ Int. Workshop on Intelligent Robots and Systems Osaka, pp. 1254–1259 (1991)
Michalek, M.: Non-minimum-phase property of N-trailer kinematics resulting from off-axle interconnections. Int. J. Control. 86(4), 740–758 (2013)
Michalek, M., Kielczewski, M., Jedwabny, T.: Cascaded VFO control for non-standard N-trailer robots. J. Intell. Robot. Syst. 77(3–4), 415–432 (2015)
Nakamura, Y., Chung, W., Sordalen, O.J.: Design and control of the nonholonomic manipulator. IEEE Trans. Robot. Autom. 17(1), 48–59 (2001)
De Luca, A., Oriolo, G.: Modelling and control of nonholonomic mechanical systems. In: Angeles, J., Kecskemethy, A. (eds.) Kinematics and Dynamics of Multi-body Systems, CISM Courses and Lectures, vol. 360, pp. 277–342. Springer (1995)
Pasillas-Lepine, W., Respondek, W.: Nilpotentization of the kinematics of the n-trailer system at singular points and motion planning through the singular locus. Int. J. Control. 74(6), 628–637 (2001)
Sloane, N.J.A.: The on-line encyclopedia of integer sequences, www.oeis.org, A000079
Sordalen, O.J.: Conversion of the kinematics of a car with N trailers into a chained form. In: 1993 IEEE International Conference on Robotics and Automation (ICRA), vol. 1, pp. 382–387, Atlanta (1993)
Nakamura, Y., Chung, W., Sordalen, O.J.: Design and control of the nonholonomic manipulator. IEEE Trans. Robot. Autom. 17(1), 48–59 (2001)
Tchon, K., Jakubiak, J., Zadarnowska, K.: Doubly nonholonomic mobile manipulators. In: 2004 IEEE International Conference on Robotics and Automation (ICRA), pp. 4590–4595, New Orleans (2004)
Tchon, K., Zadarnowska, K., Juszkiewicz, Ł., Arent, K.: Modeling and control of a skid-steering mobile platform with coupled side wheels. Bull. Acad. Pol. Sci. Tech. Sci. 63(3), 807–818 (2015)
Tilbury, D., Murray, R.M., Sastry, S.S.: Trajectory generation for the N-Trailer problem using goursat normal form. IEEE Trans. Autom. Control 40(5), 802–819 (1995)
Vafa, Z., Dubowsky, S.: The kinematics and dynamics of space manipulators: the virtual manipulator approach. Int. J. Robot. Res. 9(4), 3–21 (1990)
Zadarnowska, K.: Switched modeling and Task-Priority motion planning of wheeled mobile robots subject to slipping. J. Intell. Robot Syst. 85, 449–469 (2017)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Duleba, I. Kinematic Models of Doubly Generalized N-trailer Systems. J Intell Robot Syst 94, 135–142 (2019). https://doi.org/10.1007/s10846-018-0817-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10846-018-0817-5