
Abstract
We study the equilibria of a photoresponsive nematic elastomer ribbon within a continuum theory that builds upon the statistical mechanics model put forward by Corbett and Warner (Phys. Rev. E 78:061701, 2008). We prove that the spontaneous deformation induced by illumination is not monotonically dependent on the intensity \(I\). The ribbon’s deflection first increases with increasing \(I\), as expected, but then decreases and abruptly ceases altogether at a critical value \(I_{\mathrm{e}}\) of \(I\). \(I_{\mathrm{e}}\), which is enclosed within a hysteresis loop, marks a first-order shape transition. Finally, we find that there is a critical value of the ribbon’s length, depending only on the degree of cross-linking in the material, below which no deflection can be induced in the ribbon, no matter how intense is the light shone on it.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Nematic elastomers are elastic materials comprising cross-linked polymer networks made of nematogenic, rod-like molecules which at sufficiently low temperatures develop a collective orientational order. Despite polymer strands being cross-linked, the constituting monomers are quite loose; they are the fluid component of a mixture whose other component is a solid-like matrix kept together by the cross-linking bonds [1].
These materials can be reversibly activated by changing the temperature across the nematic-isotropic transition. Upon increasing the temperature, the nematic order is decreased, the fluid becomes isotropic and the larger availability of orientational states produces a mechanical contraction of the solid matrix along the nematic director designating the pre-existing average molecular orientation. Conversely, decreasing the temperature across the nematic-isotropic transition, an elongation takes place along the newly reconstituted nematic director, as molecules would tend to be mostly oriented in that direction. This is perhaps the most remarkable mechanical property of nematic liquid crystal elastomers (LCEs): they can undergo a shape change of up to \(400\%\) in a relatively narrow temperature range (including the nematic-isotropic transition of the fluid component).
Such a thermal activation mechanism was the only one known and studied until the groundbreaking work [2] was published in 2001. That paper explored a new possible avenue for mechanical activation of nematic LCEs: using light instead of heat. The idea is simple: if a macroscopic change in shape is caused by a change in molecular order, the latter should result in the former, whatever means are employed. Now, order can either be decreased by raising the temperature or by disturbing molecules otherwise, making it harder for them to be oriented alike.
Since the pioneering work of Eisenbach [3], this could be achieved by dispersing in the material photoisomerizable molecules, such as azobenzene and other dyes, which undergo a trans-cis isomerization upon absorbing a photon of appropriate frequency. These molecules, which are typically rod-like in the trans-state, become bent in the cis-state. Such a change in shape has a disrupting effect on surrounding molecules in the nematic phase, which remain straight, decreasing their degree of order (as first shown in [4]).Footnote 1 The specific situation envisioned in this paper is illustrated in Fig. 1, which also shows dye molecules in both trans- and cis-states.

Cartoons illustrating the photoactivation of isomerizable molecules. They are straight in their trans-state and bent in their cis-state. Forward activation is induced by a photon absorption; backward relaxation is induced by thermal agitation, with no change in temperature involved. In our model, photoresponsive molecules are part of the polymer chains, within which, upon activation, they deplete nematic order. The case envisioned here is listed as case (ii) in the text
Such a disruption of the nematic order is reversible. Photoresponsive molecules do not stay indefinitely in the cis-state; this, although locally stable, has greater energy than the trans-state, and thermal relaxation suffices to overcome the energy barrier that prevents excited molecules to drop to the trans-state right away. Once photoresponsive molecules are back in the trans-state, their reacquired rod-like shape no longer contrasts the alignment of monomers in the polymer strands, and nematic order can be reinstated. Thus, with no change in temperature, a change in order induced by light can produce a typical thermo-mechanical effect.
There are at least three possibilities for a photoisomerizable molecule to play its actuating role within a nematic elastomer network: (i) by being freely dispersed through it, (ii) by being part of the network itself, linked at a polymer chain at both its ends, (iii) by being linked to a polymer chain side-wise at an end, with the other end dangling freely. They may all be effective.
Here, we shall consider case (ii): for simplicity, we shall further assume that when photoresponsive molecules are in the trans-state they have the same length \(a\) as the photoinert nematic monomers in the polymer strands. In their trans-state, photoresponsive molecules are indistinguishable from nematogenic molecules, they obey the same statistics (see Fig. 1a). Light activation induces the trans-cis transition and changes the distance between the ends of the two arms of photoresponsive molecules (see Fig. 1b) from \(a\) to \(b< a\). This transition causes a depletion in the population of rods obeying nematic statistics and a repletion in the population of isotropically distributed rods: as such we regard photoresponsive molecules in the cis-state.
The stationary equilibrium between the light-induced trans-cis transition and its reverse thermal relaxation determines the fraction \(\phi \) of the cis-population in terms of the nematic scalar order parameter \(S\) and the orientation of the nematic director \(\boldsymbol{n}\) relative to the wave polarization unit vector \(\boldsymbol{e}\) [5, 6]. Both \(\phi \) and \(S\) in turn affect the step tensor \(\mathbf{L}\) describing the distribution of chain elements in a representation of polymer strands as freely jointed rigid rods.
The intricate interplay between these microscopic processes is described by the model recalled in Sect. 2. This model is originally due to Corbett and Warner [5–7] (see also [1, 8]).
In Sect. 3, we build the macroscopic theory that we shall adopt here. Its main ingredient is the celebrated trace formula for the elastic free-energy density (per unit volume) of nematic LCEs that has long been studied [9–12] (see also Chap. 6 of [13]).
As effectively recalled in [14], nematic LCEs have also come to be known in the specialized literature under a variety of names, including liquid crystal polymers, cross-linked liquid crystal polymers, and liquid crystal polymer networks. What marks the difference between these names is their different range of applicability, which is essentially decided by the extent of cross-linking: the higher this is, the stiffer the material becomes and the more is the nematic director \(\boldsymbol{n}\) linked to the polymer matrix. When \(\boldsymbol{n}\) is completely enslaved to the macroscopic deformation, which is the case of extreme cross-linking, also the name nematic polymer network (NPN) is used for these materials.Footnote 2
It has recently become clear [16] that the mechanical response changes continuously with the extent of cross-linking. To fix ideas, we find at the NPN end of the spectrum a transition temperature ranging from 60 to \(100^{\circ} \,\mathrm{C}\) with shear modulus parallel to the nematic director in the range of 1–\(2\,\mathrm{GPa}\). At the opposite end of the spectrum transition temperatures are below \(25\, ^{\circ}\mathrm{C}\) with shear moduli about \(100\,\mathrm{MPa}\) or lower [14].
Since in our model the scalar order parameter \(S\) is not the driving parameter of spontaneous deformation, as the temperature is kept fixed, a further potential must supplement the trace formula, which penalizes departures from the equilibrium value \(S_{0}\) of \(S\), which is dictated by temperature. This role will be played here (as was in [17]) by the Maier-Saupe potential [18].
In Sect. 3, we shall also adapt to the present setting the surface elastic free-energy density (per unit area) obtained in [19] for a thin NPN sheet by extending a method of dimension reduction, which is standard in the theory of plates and also known as the Kirchhoff-Love hypothesis [20]. This surface free energy features both stretching and bending contributions, which here are reformulated in the language of the model illustrated in Sect. 2.
In Sect. 4, we apply the reduced elastic free energy for a sheet to a narrow ribbon and study its equilibrium configurations in terms of a dimensionless intensity parameter \(I\). Resorting to a uniformity approximation, we simplify the total free-energy functional for a ribbon to an extent that makes it possible to find its critical points in closed form. The bifurcation analysis that ensues reveals a non-monotonic dependence on \(I\) of the maximum deflection angle of an illuminated ribbon.
Our conclusions are collected and discussed in Sect. 5 together with comparisons of our work with that of others. The paper is closed by an Appendix, where for completeness we recall the reasoning that is followed in [7] to justify both the equilibrium value \(\phi \) of the cis-population and the expressions for the principal chain steps (i.e., the eigenvalues of \(\mathbf{L}\)) after photoactivation.
A vast, nearly intimidating literature is available on nematic LCEs. The classical reference is the influential book by Warner and Terentjev [13]; the theoretical literature that preceded and prepared for it [9, 21–25] is also of interest. General continuum theories have also been proposed [26–28], some also very recently. Applications are abundant; a collection can be found in a book [29] and a recent special issue [30]. Finally, the interested reader can gain some valuable guidance from the reviews [31–37].
The specific theme of this paper is photoactivation of NPN sheets; the recent studies [17, 38, 39] are closely related to it and, notwithstanding the differences, they have been inspirational to us.
2 The Corbett-Warner Model
In this section, mainly following [5–7], we present a statistical mechanics model put forward by Corbett and Warner to describe the interaction of an incoming polarized light wave with a nematic elastomer containing photoactivable molecules in its polymer strands, as depicted in Fig. 1. For completeness, the reasoning that led these authors to their understanding of shape effects induced on polymer networks by the trans-cis transition is described in more detail in Appendix A. Here, our main focus is on the foundations of the model and its main outcomes, which will form the basis for our macroscopic theory laid down in the following section.
The model is based on the following assumptions:
-
1.
Photoresponsive molecules in their trans-state and photoinert (non-photoresponsive) molecules are assumed to be statistically identical.
-
2.
Photoresponsive molecules in the cis-state are statistically isotropic.
-
3.
The forward trans-cis photoisomerization is powered by light, whereas the backward cis-trans transition is spontaneously driven by thermal agitation.
-
4.
The trans-cis reaction is treated at the single-molecule level: equilibrium at one molecule is not affected by its interaction with surrounding molecules.
Polymer strands, constituted of both photoresponsive and photoinert molecules, are represented as chains of freely jointed rigid rods; the orientation in space of an individual rod will be represented by a unit vector \(\boldsymbol{u}\in \mathbb{S}^{2}\). The order tensor \(\mathbf{Q}\) describing the alignment of mesogenic monomers is defined as
where \(\mathbf{I}\) is the identity tensor and the brackets \({\left \langle \cdots \right \rangle }\) designate ensemble averaging. We shall assume that \(\mathbf{Q}\) is uniaxial, and so it can be represented as
where \(S\) is the scalar order parameter, ranging in the interval \([-\frac{1}{2},1]\), and \(\boldsymbol{n}\in \mathbb{S}^{2}\) is the nematic director.Footnote 3 It readily follows from (2) that
where \(P_{2}\) is the second Legendre polynomial.
In the following, \(S\) and \(\boldsymbol{n}\) will represent the scalar order parameter and the nematic director in the present (photoactivated) configuration of the material, after the spontaneous deformation of the body induced by illumination has taken place. Since we also assume that prior to photoactivation the polymer system had been cross-linked in the nematic phase, we shall denote by \(S_{0}\) and \(\boldsymbol{n}_{0}\) the scalar order parameter and the nematic director in the reference configuration, prior to illumination. \(\mathbf{Q}_{0}\), related to \(S_{0}\) and \(\boldsymbol{n}_{0}\) as \(\mathbf{Q}\) is to \(S\) and \(\boldsymbol{n}\) in (2), will denote the corresponding order tensor.
The nematic order in the material is also reflected by the step tensor, which describes the spatial organization of polymer strands (see Appendix A.1 for a formal definition). Since there are two different polymer organizations, in the reference and present configurations, there will correspondingly be two step tensors, \(\mathbf{L}_{0}\) and \(\mathbf{L}\). They have the same uniaxial form as \(\mathbf{Q}_{0}\) and \(\mathbf{Q}\), respectively, and are represented as
where \((\ell _{0\perp },\ell _{0\parallel })\) and \((\ell _{\perp },\ell _{\parallel })\) are the corresponding principal chain steps in the directions orthogonal and parallel to the directors \(\boldsymbol{n}_{0}\) and \(\boldsymbol{n}\) (see Appendix A.1).
The principal chain steps \((\ell _{0\perp },\ell _{0\parallel })\) in the reference configuration are related to the scalar order parameter \(S_{0}\) in the following way,
where \(a\) is the step length that both photoinert nematogenic molecules and photoresponsive ones in the trans configuration are assumed to have in common.
A statistical mechanics argument of Corbett and Warner [5, 6] justifies writing the principal chain steps \((\ell _{\perp },\ell _{\parallel })\) in the present configuration as
where \(S\) is the scalar order parameter after photoactivation, \(b< a\) is the step length of photoresponsive nenatogens in the cis configuration, and \(\phi \) is the number fraction of these molecules (see Appendix A.1). It should be noted that for \(\phi =0\) equation (6) reduces to (5), only with \(S\) instead of \(S_{0}\).
The equilibrium value of \(\phi \) depends on how light impinges on the material. Letting the unit vector \(\boldsymbol{e}\in \mathbb{S}^{2}\) denote the polarization of the incoming light, that is, the direction of vibration of the electric field, it was shown in [6] that in equilibrium
where \(A\) is the fraction of photoresponsive nematogens in a polymer strand, ℐ is the intensity of light, and \(\mathcal{I}_{\mathrm{c}}\) a characteristic intensity, related to both forward and reverse isomerization rates.
We show in Appendix A.2 how (7) can be derived with the aid of appropriate averages of the scalar product \(\boldsymbol{u}\cdot \boldsymbol{e}\) of the molecular direction \(\boldsymbol{u}\) and the polarisation direction \(\boldsymbol{e}\) [5, 6, 17]. This derivation also shows that, for unpolarized light, which is the case that we shall consider in this paper, \((\boldsymbol{n}\cdot \boldsymbol{e})^{2}\) should be replaced in (7) by its average over a uniform distribution of \(\boldsymbol{e}\) in the unit circle \(\mathbb{S}^{1}_{\boldsymbol{k}}\) lying in the plane orthogonal to the unit vector \(\boldsymbol{k}\in \mathbb{S}^{2}\) designating the direction of propagation of light. Since
equation (7) will be replaced here by
where
is the relative intensity, a dimensionless quantity that in our analysis will play the role of a control parameter.
It is a simple matter to check that for \(S<1\) the function delivering \(\phi \) in (9) tends to the asymptotic value \(A\) for \(I\to \infty \) (the bleaching limit). Moreover, letting \(\vartheta \) be the angle that \(\boldsymbol{k}\) makes with \(\boldsymbol{n}\), for a given intensity \(I\), \(\phi \) is either a monotonic increasing or decreasing function of \(\vartheta \) for either \(S>0\) or \(S<0\), respectively. Thus, for positive \(S\), the photoactivation mechanism described above is most efficient when \(\boldsymbol{n}\) and \(\boldsymbol{k}\) are at right angles. If a deformation of the body moves \(\boldsymbol{n}\) closer to \(\boldsymbol{k}\), at a given intensity, photoactivation may be weakened.
In general, light is absorbed in a material in a way that depends on the penetration depth and direction of propagation of the radiation, as described, for example, by Beer’s law [41] (see also Chap. 1 of [42]). Here, this classical picture is further complicated by the fact that absorption also depends on the population of photoresponsive molecules in the trans-state, but not on those in the cis-state. To account properly for this would require coupling the population evolution equation resulting in (7) at equilibrium with an attenuation equation for the intensity, as proposed in [8].
Here, we shall only be concerned with thin films, and we shall make the approximation that the intensity of light remains unaffected through the thickness of the body. We shall refer to this as the photo-uniformity approximation. Of course, this will have a price: we shall not be able to capture the symmetry breaking associated with the direction of propagation of light. Whatever instability we shall be able to predict with our continuum theory, flipping towards or away from light, such as in the experiments described in [43], [44], or [45], will come from extrinsic ad hoc considerations. We shall be contented with capturing exactly (possibly in a closed form) just the flipping (in either direction), if any.
3 Free-Energy Functional
Our continuum theory is based on the trace formula for the elastic free energy per unit volume (in the reference configuration) of nematic LCEs in the form put forward in [46],
where \(\mathbf{F}\) is the deformation gradient and the shear elastic modulus \(\mu _{0}\) is given by
in terms of the number density of polymer strands \(n_{\mathrm{s}}\), the Boltzmann constant \(k_{B}\), and the absolute temperature \(T\).
Equation (11) is the nematic generalization of the classical elastic energy density for elastomers, which Rivlin [47] called neo-Hookian (see also [48] and the detailed account in Sect. 95 of [49], which sets this constitutive law within the larger class of Mooney-Rivlin materials),
where \(\mathbf{C}_{\boldsymbol{f}}:=\mathbf{F}^{\mathsf{T}}\mathbf{F}\) is the (three-dimensional) right Cauchy-Green tensor associated with a deformation \(\boldsymbol{f}\). A statistical mechanics justification has also been derived for (13) from various theories of long chain molecules.Footnote 4
The function in (11) is obtained by adapting the simplest realization of these theories [51] to the case where in both the reference and present configurations the distribution of monomers in a polymer chain is anisotropic.
When the principal chain steps \((\ell _{0\perp },\ell _{0\parallel })\) and \((\ell _{\perp },\ell _{\parallel })\) in both the reference and present configurations are prescribed, as is the case where the corresponding scalar order parameters \(S_{0}\) and \(S\) are given as functions of temperature,Footnote 5 the second term in (11) is not affected by the deformation and can be omitted, thus reducing (11) to the bare trace formula of [9] (also discussed in [53]), which depends only on \(\mathbf{F}\) and \(\boldsymbol{n}\).Footnote 6
Our theory will be based on two further assumptions:
-
(a)
We assume that the director \(\boldsymbol{n}\) is enslaved to the deformation, so that
$$ \boldsymbol{n}=\frac{\mathbf{F}\boldsymbol{n}_{0}}{\vert \mathbf{F}\boldsymbol{n}_{0}\vert}, $$(14)which says that the nematic director \(\boldsymbol{n}_{0}\) imprinted in the polymer network at the cross-linking time is conveyed by the solid matrix of the body.
-
(b)
We assume that the material is incompressible, so that \(\mathbf{F}\) is subject to the constraint
$$ \det \mathbf{F}=1. $$(15)
Clearly, assumption (a) is expected to be more realistic for strongly cross-linked polymers than for weakly cross-linked ones.Footnote 7 In real life, NPNs (or glassy nematics) are good examples of the former category, as are ordinary nematic LCEs of the latter. On the other hand, while ordinary nematic LCEs have Poisson ratio \(\nu \) close to \(1/2\), and so they are nearly incompressible, NPNs may have \(\nu \in (1/2,2)\) [37, 54].
The above assumptions will simplify our analysis a great deal, making tractable the nonlinear problem discussed in the next section. We believe that our model is most appropriate for NPNs and that the conclusions reached here for these materials remain qualitatively valid, should either (14) or (15) be partly relaxed, for example, by means of a penalizing potential.Footnote 8
It is a matter of laborious, but simple algebra, also making use of (14) and (4a), (4b) to give \(f_{\mathrm{e}}\) in (11) the following form
In our model, the scalar order parameter \(S\) is not prescribed, but is free to adjust itself in response to illumination. The elastic free energy must then be supplemented by the bulk condensation energy for the nematic component. Here we depart from [46]. While they adopted the Landau-deGennes phenomenological approach, we derive the appropriate condensation potential \(f_{\mathrm{c}}\) (per unit volume) from the Maier-Saupe mean-field formulation of nematic condensation (from the isotropic phase), as described in Sect. 1.3 of [55]. We set
where \(n_{\mathrm{n}}\) is the number density of nematogenic molecules, here appropriately reduced to account for their fraction in the cis-state (which are no longer in the nematic phase), and
In (18), \(J\) is the Maier-Saupe molecular interaction energy (scaled to \(k_{B}T\)) and \(\operatorname{daw}\) denotes the Dawson integral, defined as
The minimizer of \(\psi _{\mathrm{MS}}\) depends only on \(J\), which will be chosen so that \(\psi _{\mathrm{MS}}\) attains its minimum at \(S=S_{0}\), the scalar order parameter prior to illumination.
Scaling the total energy density \(f_{\mathrm{t}}:=f_{\mathrm{e}}+f_{\mathrm{c}}\) to \(n_{\mathrm{n}}k_{B}T\) (so as to make it dimensionless), we arrive at
where
is the reduced shear modulus. It is precisely the value of \(\mu \) that describes in our model the degree of cross-linking in the material: the larger \(\mu \), the stronger the cross-linking. Here, following [6], we shall identify two values of \(\mu \) as representatives for two alternative regimes: \(\mu =1/10\), for strongly cross-linked polymers, and \(\mu =1/50\), for weakly cross-linked ones.
3.1 Dimension Reduction
To treat (in the following section) the equilibrium of a thin sheet, we must first perform an appropriate reduction of the total free-energy density \(f_{\mathrm{t}}\) (per unit volume) in (20) to a surface free energy (per unit area) to be attributed to a surface in three-dimensional space representing the deformed shape of the sheet.
We accomplish this task following mainly [19].Footnote 9 We perform an expansion of \(f_{\mathrm{t}}\) retaining up to the cubic terms in the sheet’s thickness, thus identifying stretching and bending contents in the surface energy by the power in the thickness they scale with.Footnote 10
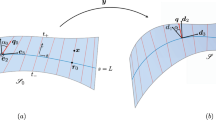
We identify the undeformed body with a slab \(\mathsf{S}\) of thickness \(2h\) and midsurface \(\mathscr{S}_{0}\) in the \((\boldsymbol{e}_{1},\boldsymbol{e}_{2})\) plane of a Cartesian frame. We further assume that \(\boldsymbol{n}_{0}\) is imprinted in \(\mathsf{S}\) so that it does not depend on the \(x_{3}\) coordinate and \(\boldsymbol{n}_{0}\cdot \boldsymbol{e}_{3}\equiv 0\). Moreover, we represent the three-dimensional deformation \(\boldsymbol{f}\) as
where \(\boldsymbol{x}\) varies in \(\mathscr{S}_{0}\), \(x_{3}\) ranges in the interval \([-h,h]\), \(\boldsymbol{\nu }\) is the normal to the surface \(\mathscr{S}=\boldsymbol{y}(\mathscr{S}_{0})\), which is the image in the deformed slab \(\boldsymbol{f}(\mathsf{S})\) of the midsurface \(\mathscr{S}_{0}\) (see Fig. 2), and \(\Phi (\boldsymbol{x},x_{3})\) is a function to be determined,Footnote 11 enjoying the property

Schematic representation of the deformation of a thin sheet. \(\mathscr{S}_{0}\) is the planar midsurface of the slab \(\mathsf{S}\) of thickness \(2h\) representing the reference configuration of the body. In the deformed slab \(\boldsymbol{f}(\mathsf{S})\), \(\mathscr{S}\) is the image under the mapping \(\boldsymbol{y}\) of the midsurface \(\mathscr{S}_{0}\); it is an oriented surface with unit normal \(\boldsymbol{\nu }\). \(\mathscr{S}_{0}\) lies in the plane \((\boldsymbol{e}_{1},\boldsymbol{e}_{2})\) of Cartesian frame \((\boldsymbol{e}_{1},\boldsymbol{e}_{2},\boldsymbol{e}_{3})\)
As shown in [19], the constraint of incompressibility (15) determines \(\Phi \) in the form
where \(H\) and \(K\) are the mean and Gaussian curvature of \(\mathscr{S}\), respectively, defined as
in terms of the two-dimensional curvature tensor \(\nabla \!_{\mathrm{s}}\boldsymbol{\nu }\) at the point \(\boldsymbol{y}(\boldsymbol{x})\) on \(\mathscr{S}\).Footnote 12
The following formula for \(\mathbf{F}\) was justified in [19] as a consequence of (23),
where \(\Phi '\) denotes the derivative of \(\Phi \) with respect to \(x_{3}\) and \(\nabla \) is the gradient in \(\boldsymbol{x}\), so that, in particular,
Since (23) also implies that \(\nabla \Phi (\boldsymbol{x},0)\equiv \mathbf{0}\), for \(h\) sufficiently small we have
and so the last term on the right-hand-side of (26) is of order \(o(\Phi ')\). From now on, we shall ignore it and use the approximate expression for \(\mathbf{F}\)
Since \(\boldsymbol{n}_{0}\cdot \boldsymbol{e}_{3}\equiv 0\), it follows from (29) and (14) that the nematic director \(\boldsymbol{n}\) in the present configuration \(\boldsymbol{f}(\mathsf{S})\) is delivered by
where (27) has also been used. Since \((\nabla \boldsymbol{y})\boldsymbol{n}_{0}\cdot \boldsymbol{\nu }\equiv 0\) and \(\nabla \!_{\mathrm{s}}\boldsymbol{\nu }\) is a symmetric tensor mapping the local tangent plane to \(\mathscr{S}\) into itself, (30) shows that \(\boldsymbol{n}\cdot \boldsymbol{\nu }=0\) everywhere within \(\boldsymbol{f}(\mathsf{S})\), but \(\boldsymbol{n}\) is not uniform on the fibers along \(\boldsymbol{\nu }\), as \(\Phi \) depends on \(x_{3}\).
Moreover, by (29), the three-dimensional right Cauchy-Green tensor \(\mathbf{C}_{\boldsymbol{f}}\) can be written as
where
In (32),
is the two-dimensional right Cauchy-Green tensor,
By (24), (31) becomes a (rather involved) function of the mapping \(\boldsymbol{y}\) and the variable \(x_{3}\).
Our next task is to integrate in the latter variable the expression for \(f_{\mathrm{t}}\) in (20). To this end, we make further use of the photo-uniformity approximation discussed at the end of Sect. 2: we shall take \((\ell _{\perp },\ell _{\parallel })\) and \(S\) as independent of \(x_{3}\). In particular, by (30) and (23), in (9) we shall express \(\boldsymbol{n}\) as
which is the nematic director evaluated on \(\mathscr{S}\) and appears to be conveyed by the deformation of \(\mathscr{S}_{0}\), in accordance with the three-dimensional constraint (14). The three-dimensional incompressibility (15) of the sheet is assured by the form of the function \(\Phi \) given in (24). In the spirit of the reduction to two dimensions, we make the additional assumption that
a constraint that predicates the inextensibility of the midsurface \(\mathscr{S}_{0}\).Footnote 13
Reasoning as in [19], we identify the stretching and bending contents of the surface elastic free energy, as the \(\boldsymbol{y}\)-dependent components scaling like \(h\) and \(h^{3}\), respectively, of the three-dimensional density \(f_{\mathrm{t}}\) integrated in \(x_{3}\) over the thickness of \(\mathsf{S}\). Denoting by \(F_{\mathrm{s}}\) and \(F_{\mathrm{b}}\) the resulting stretching and bending elastic contents, respectively, both scaled to \(n_{\mathrm{n}}k_{B}Th\), with essentially the same computations illustrated in [19], which would be too boring to reproduce here, we arrive at
and
where \(A\) here denotes the area measure and
Note that the energies \(F_{\mathrm{s}}\) and \(F_{\mathrm{b}}\) do indeed depend on \(S\) and \(I\), namely via the step-lengths \(\ell _{0\perp }\) and \(\ell _{0\parallel }\) which also depend on the number fraction \(\phi \). This latter in turn also depends on \(S\) and \(I\) according to (9).
\(F_{\mathrm{s}}\) and \(F_{\mathrm{b}}\) embody two separate components of the elastic free energy at the level of approximation we consider. To obtain the total free energy \(F_{\mathrm{t}}\) (likewise scaled to \(n_{\mathrm{n}}k_{B}Th\)), we must supplement \(F_{\mathrm{s}}+F_{\mathrm{b}}\) with the integral (again across the slab’s thickness) of the components of \(f_{\mathrm{t}}\) independent of the deformation \(\boldsymbol{y}\),
It is worth noting that by the scaling chosen here \(F_{\mathrm{t}}\) has the physical dimensions of an area; to obtain a dimensionless energy, we should normalize \(F_{\mathrm{t}}\) to the area of \(\mathscr{S}_{0}\) (which by (36) is the same as the area of \(\mathscr{S}\)), as will be done in the following section.
If light is impinging at right angles from above on \(\mathscr{S}_{0}\), so that \(\boldsymbol{k}=-\boldsymbol{e}_{3}\) (see Fig. 2), by (35), the cis-population fraction \(\phi \) in (9) depends on \(\boldsymbol{k}\) and \(\boldsymbol{n}\) through
In [6], a few realistic values were suggested for the parameters that still need to be prescribed to solve a specific equilibrium problem. They suggested to take
where \(T_{\mathrm{NI}}\) is the nematic-to-isotropic transition temperature. In our parameterization of the Maier-Saupe potential \(\psi _{\mathrm{MS}}\) in (18), this value of \(S_{0}\) corresponds to \(J\doteq 7.5\). As for the relative intensity \(I\), Eisenbach [69] suggests that it should not exceed 15, whereas for Serra and Terentjev [70] it could go up to 80. In the application of our theory presented in the following section, we shall take the above values for \(A\), \(b/a\), \(S_{0}\), and \(J\), and we shall never consider going beyond \(I=70\).
4 Ribbon Deflection
We now consider a thin, narrow ribbon originally parallel to the \((\boldsymbol{e}_{1},\boldsymbol{e}_{2})\) plane. Its midsurface \(\mathscr{S}_{0}\) is a narrow strip of length \(l\) and width \(w\), represented by the set \(\mathscr{S}_{0}=\{(x_{1},x_{2}):0\leqq x_{1}\leqq l,\, 0\leqq x_{2} \leqq w\}\). We further assume that the ribbon remains at all times homogeneous in \(x_{2}\) and parallel to the \(\boldsymbol{e}_{2}\) direction so that the scalar order parameter \(S\) is a function \(S=S(x_{1})\) of the \(x_{1}\) coordinate only.
We represent \(\boldsymbol{y}\) as
which allows the ribbon to come out of the \((\boldsymbol{e}_{1},\boldsymbol{e}_{2})\) plane while its normal remains in the \((\boldsymbol{e}_{1},\boldsymbol{e}_{3})\) plane at all times.
In order to make the inextensibility constraint (36) explicit, we note that
and so
Hence, the requirement \(\det \mathbf{C}=1\) becomes
Separation of variables shows that this is satisfied only if there are a scalar \(\lambda >0\) and a function \(\vartheta \) such that
and
A value of \(\lambda >1\) corresponds to a contraction of the length of the ribbon together with an extension of its width.
The cross-section of the ribbon in the \((\boldsymbol{e}_{1},\boldsymbol{e}_{3})\) plane is described by the curve \(\gamma \) where
As
we see that \(\vartheta (x_{1})\) is simply the angle that the tangent to the ribbon makes at \(\boldsymbol{y}(x_{1},x_{2})\) with the \(\boldsymbol{e}_{1}\) axis. A standard computation shows that there the curvature \(\kappa \) of the ribbon is
The ribbon is now determined entirely by the curve \(\gamma \) and so by its cross section in the \((\boldsymbol{e}_{1},\boldsymbol{e}_{3})\) plane. It thus resembles a one-dimensional beam. However, it still has more structure than a simple beam. Any possible contraction in the length of the ribbon will need to be accompanied by an extension in its width.
4.1 Ribbon Free Energy
To make the free energy of the ribbon explicit, we write the director imprinted in \(\mathscr{S}_{0}\) as
As before, we assume that unpolarized light is shone upon the ribbon from above with \(\boldsymbol{k}=-\boldsymbol{e}_{3}\). The right-hand-side of equation (41) can now be computed by using also (44), (47), and (48); we find that
At this point, it is worth remarking that the representation in (43) for \(\boldsymbol{y}\) and hence the expression (53) are realistic only for either \(\varphi _{0}=0\) or \(\varphi _{0}=\frac{\pi}{2}\). For \(0<\varphi _{0}<\frac{\pi}{2}\), a more general class of deformations \(\boldsymbol{y}\) should be considered, which also allows for twist. As can be seen from (53), the case \(\varphi _{0}=\frac{\pi}{2}\) is almost trivial, as the number fraction \(\phi \) of cis molecules given by equation (9) would then be independent of \(\vartheta \). Therefore, we focus on the case \(\varphi _{0}=0\), which will turn out to be rich enough to allow the ribbon to change shape.
The free-energy density of the narrow ribbon is independent of \(x_{2}\), and so the total free energy \(F_{\mathrm{t}}\) given by (40) can be simplified to
where we have scaled to \(n_{\mathrm{n}}k_{B}Thw\) and only the integration over \(x_{1}\) along the length of the ribbon remains.
Before introducing further simplifications, we give the free energy a dimensionless form by defining \(\xi :=x_{1}/l\); the energy further scaled to the length \(l\) of the ribbon then becomes
where
To keep notation simple, we have used the same symbol \(F_{\mathrm{t}}\) to denote the free-energy functionals in equations (40), (54), and (55). Clearly, this is a double abuse of notation: the functionals and also their dimensions differ. Furthermore, the primes in equations (54) and (55) denote differentiation with respect to the argument of \(\vartheta \), i.e., \(x_{1}\) in the former and \(\xi \) in the latter equation.
4.2 Clamped Ribbon Geometry
We consider a ribbon clamped at one end and free at the other. Specifically, we prescribe the boundary conditions
that is, the curvature (51) vanishes at the free end. We assume that the director is imprinted so as to lie along the length of the ribbon, \(\varphi _{0}=0\).
By symmetry, \(\vartheta \equiv 0\) is always a critical point of \(F_{\mathrm{t}}\). Indeed, \(f\) in equation (56) is an even function of \(\vartheta \) for all values of the intensity \(I\), see (53). Therefore, all other critical points of \(F_{\mathrm{t}}\) come in pairs of opposite signs, one member corresponding to an increasing function \(y_{3}(\xi )\), the other to a decreasing function. We take the increasing companion as representative of each pair: \(0\leqq \vartheta \leqq \vartheta _{\mathrm{m}}\), see the discussion at the end of Sect. 2. Figure 3 shows a sketch of two ribbons, one undistorted and the other in a bent configuration.

The ribbon, depicted in grey, is clamped at the origin with its left end. Without illumination, it lies on the \(y_{1}\)-axis. Upon illumination, its right end is free to rise, with the curvature at the free end prescribed to be zero. The black bars indicate the nematic director, which is aligned along the length of the ribbon
The integrand in the free energy (55) has two distinct contributions: the first term depends only on the derivative \(\vartheta '\), and the second term, \(f\) as given by (56), depends only on \(\vartheta \). If we assume that \(\vartheta \) is constant, then the entire integrand is constant. For given light intensity \(I\), the free energy is then minimized if \(f\) is the minimum with respect to \(\lambda \) and \(S\). In Fig. 4 we show the minimizing values \(\lambda _{0}\) and \(S_{0}\) for the case \(\vartheta \equiv 0\) and the two values \(\mu =1/10\) and \(\mu =1/50\) for \(0\le I\le 50\).

Minimizers \((\lambda _{0}(I),S_{0}(I))\) of \(f\) in (56) for the given light intensity \(I\) and \(\vartheta =0\). These values also minimize the free energy (55) in the case \(\vartheta \equiv 0\). Both the scalar order parameter \(S\) and the stretching \(\lambda \) vary on very slightly with the light intensity \(I\). The situation is similar for other values of \(\vartheta \) (not shown)
The magnitude of the deviation of \(S\) and \(\lambda \) from their values at zero light intensity remains very small for all intensities. Motivated by this observation, we make the following simplification. We replace \(f\) in (56) by
where \(\lambda _{0}(I)\) and \(S_{0}(I)\) are the minimizers for \(f\) when \(\vartheta =0\). The energy functional then becomes
which now depends on the single unknown function \(\vartheta \).
4.3 Euler-Lagrange Equation
Any equilibrium profile of the ribbon needs to satisfy the Euler-Lagrange equation derived from (59),
Since \(\left .\frac{\partial f_{0}(\vartheta {;}I)}{\partial \vartheta } \right \vert _{\vartheta =0}=0\), the profile of the undistorted ribbon with \(\vartheta \equiv 0\) is always a solution of equation (60) satisfying the boundary conditions (57); we shall call it the trivial solution. We analyze equation (60) using a hybrid approach: We first derive a range of explicit expressions that then serve as a basis for producing numerically a range of illustrating graphs using the parameters given in (42).
For non-trivial solutions, multiplying equation (60) by \(\vartheta '\) and integrating shows that a conservation law holds in the form
with a constant \(c\). This constant can be determined by using the boundary condition \(\vartheta '(1)=0\), we have
Equation (61) is autonomous (i.e., it does not depend explicitly on \(\xi \)) and we are interested in its solutions with \(\vartheta '\ge 0\). We call simple every such solution, if existing, alongside its mirror image, for which \(\vartheta '\le 0\). If \(\vartheta '\ge 0\), \(\vartheta \) ranges monotonically in the interval \([0,\vartheta (1)]\), and so we find that \(\vartheta (1)=\vartheta _{\mathrm{m}}\), namely that the largest ribbon angle is found at the free end. Moreover, it readily follows from (50) that the corresponding equilibrium profile of the ribbon is convex (as sketched in Fig. 3). If the requirement of monotonicity, \(\vartheta '\ge 0\), is dropped, more convoluted solutions could be constructed by stitching together simple solutions at points where \(\vartheta '=0\). However, we expect such solutions to have higher energy than the simple ones.
Using the constant (62) in equation (61) we find that
where for clarity we have here included the argument \(\xi \). Separating variables and integrating yields
Recalling that \(\vartheta (1)=\vartheta _{\mathrm{m}}\), we find that
which is a compatibility condition for the solution profile. It links the ratio \(l/h\) of length to thickness of the ribbon, the light intensity \(I\), and the maximum angle \(\vartheta _{\mathrm{m}}\).
A condition for a bent solution to bifurcate from the trivial one can be obtained by computing the limit of equation (65) as \(\vartheta _{\mathrm{m}}\rightarrow 0\), assuming that it exists. To find the limit of the integral, we consider the Taylor series of \(f_{0}\) near zero,
where, for brevity, the parameter \(I\) has been dropped from the argument of \(f_{0}\) and a prime denotes differentiation with respect to \(\vartheta \). Use of (66) in (65) shows that the existence of the limit requires to have \(f_{0}''(0)<0\), as
and so a bifurcation is found when
Figure 5 shows for the two intensities \(I=2\) and \(I=30\) the value of \(l^{\ast}/h\) as a grey horizontal line and, as a black graph, the values of \(l/h\) obtained using the compatibility condition (65) for \(0<\vartheta _{\mathrm{m}}<\frac{\pi}{2}\). The two pictures are qualitatively very different. For the lower intensity, there is a single critical value \(l^{\ast}/h\) below which no bent solution is possible, and above which a single bent solution is present. For the higher intensity, in addition to \(l^{\ast}/h\), there is a second critical value \(l_{\ast}/h\) below which no bent solution exist. For \(l_{\ast}/h< l/h< l^{\ast}/h\) there are two bent solutions, and for \(l/h>l^{\ast}/h\) there is a single bent solution, as in the other case.

For \(I=2\) in (a) and \(I=30\) in (b) the black graph shows the values of \(l/h\) required to satisfy the compatibility condition (65) as a function of \(\vartheta _{\mathrm{m}}\). The grey line shows the limit \(l^{\ast}/h\) of \(l/h\) as \(\vartheta _{\mathrm{m}}\rightarrow 0\), see equation (68). For \(I=2\), there are two different regimes depending on the value of \(l/h\), while for \(I=30\), there are three regimes
To determine the critical value \(I_{\mathrm{c}}\) of the intensity at which the two different behaviours meet, we examine the compatibility condition (65) for small values of \(\vartheta _{\mathrm{m}}\). To this end, we need one further term of the Taylor series of \(f_{0}\) near zero,
A straightforward computation then shows that
Therefore, given that \(-f_{0}''(0)\) is positive, when \(f_{0}^{(iv)}(0)\) is positive we have the situation shown in Fig. 5 (a) with a single critical value \(l^{\ast}/h\). When \(f_{0}^{(iv)}(0)\) is negative we have the situation shown in Fig. 5 (b) with the additional critical value \(l_{\ast}/h\).
On the left of Fig. 6 we show for the whole possible range \(0\le \mu \le 1\) the critical values \(I_{\mathrm{c}}\) of the intensity where the fourth derivative of \(f_{0}\) at zero changes sign and in the middle the corresponding critical values \(l_{\mathrm{c}}/h\) obtained by equation (68), \(l_{\mathrm{c}}=l^{\ast}(\mu ,I_{\mathrm{c}})\). On the right, parametrized by \(\mu \), we plot the curve of critical points \((I_{\mathrm{c}},l_{\mathrm{c}}/h)\) in the \(I\)-\(l/h\) plane.

Critical intensity \(I_{\mathrm{c}}\) (left) and critical length \(l_{\mathrm{c}}/h\) (middle) versus \(\mu \) and the curve \((I_{\mathrm{c}},l_{\mathrm{c}}/h)\) parameterized by \(\mu \) (right) with the relevant values of \(\mu \) marked by black circles. For length-to-thickness ratios below the graph in the middle diagram, no bent solutions exist for any intensity
To assess the stability of bent ribbon profiles relative to the \(\vartheta \equiv 0\) profile, we compare energies. In this (limited) perspective we shall say that an equilibrium configuration is stable if it has less energy than any other configuration.
The total energy of the ribbon in an equilibrium configuration can be expressed as a function of \(\vartheta _{\mathrm{m}}\) by using in the functional (59) the conservation law (61) with the constant from (62):
where in the first step we have used equation (63) for substituting \(\xi \) with \(\vartheta \), and in the second step we have used the condition (65) to replace \(l/h\).
Figure 7 shows the energy of equilibrium solutions for the same two intensities used in Fig. 5, \(I=2\) and \(I=30\), for \(0\le \vartheta _{\mathrm{m}}\le \frac{\pi}{2}\). The value of \(l/h\) is implicitly defined by the compatibility condition (65). For \(I< I_{\mathrm{c}}\) (Fig. 7 (a)), if a bent solution exists it is always stable. For \(I>I_{\mathrm{c}}\) (Fig. 7 (b)), there can be both unstable and stable bent solutions; the maximum of \(F_{\mathrm{eq}}\) is attained for the same value of \(\vartheta _{\mathrm{m}}\) as the minimum \(l_{\ast}/h\) of the function defined by (65) (see Fig. 5 (b)). As \(l/h\) is increased above \(l_{\ast}/h\) two bent solutions originate whose energies fall on either side of the maximum in Fig. 7 (b). As \(l/h\) keeps increasing, the solution with the smaller \(\vartheta _{\mathrm{m}}\) gradually approaches the trivial solution, having always higher energy until it merges with it at \(l/h=l^{\ast}/h\). Correspondingly, the solution with larger \(\vartheta _{\mathrm{m}}\) keeps reducing its energy: there is then exactly one bent solution with the same energy as the trivial solution; we denote its maximum deflection angle \(\vartheta _{\mathrm{m}}\) by \(\vartheta _{\mathrm{e}}\) and the corresponding length to thickness ratio by \(l_{\mathrm{e}}/h\).

Energy of equilibrium solutions for \(I=2\) and \(I=30\) as a function of \(0\le \vartheta _{\mathrm{m}}\le \frac{\pi}{2}\). The length \(l/h\) of the ribbon is implicitly determined by the compatibility condition (65) and can be read off from Fig. 5. For reference, the grey line shows the energy of the undistored ribbon
4.4 Bifurcation Analysis
To summarize what we have established so far, we present in Fig. 8 three graphs in the \(I\)-\(l/h\) plane: the solid line shows \(l_{\mathrm{e}}/h\), where a bent solution exists that has the same energy as the trivial solution. The dashed line shows \(l^{\ast}/h\) as given by (68): above this line the trivial solution is unstable. The dotted line corresponds to the minimum \(l_{\ast}/h\) of the graph shown in Fig. 5 (b): below this line, no bent solution exists. The minimum of the graph in Fig. 8 has coordinates \((I_{\mathrm{c}},l_{\mathrm{c}}/h)\) for the chosen value of \(\mu =1/10\), see the right graph in Fig. 6.

Critical lengths versus light intensity for \(\mu =1/10\). Along the solid line, a bent solution exists that has the same energy as the trivial solution. Above the dashed line, the trivial solution is unstable. Below the dotted line, no bent solution exists. To the left of the minimum, located at the critical point \((I_{\mathrm{c}},l_{\mathrm{c}}/l)\), all three critical lengths coincide and only the solid line is drawn: below it no bent solution exists, above it the trivial solution is unstable. In the blow-up on the right the grey line marks \(l/h=10\), and its intersections with the graphs are marked \(I_{0}\), \(I^{\ast}\), \(I_{\mathrm{e}}\), and \(I_{\ast}\): the same intensities are also identified in Fig. 9 below
While Fig. 8 contains the gist of our analysis, it is rather artificial in that it shows length-to-thickness ratios as functions of the light intensity. Of course, in an experiment \(l/h\) is fixed and only \(I\) can be varied. We display therefore in Fig. 9 the maximum angle \(\vartheta _{\mathrm{m}}\) of the ribbon profile as a function of the intensity. When the light intensity reaches \(I_{0}\), a bifurcation from the trivial to a bent solution occurs. With increasing intensity, the maximum angle \(\vartheta _{\mathrm{m}}\) first increases but eventually decreases, and at \(I_{\ast}\) the bent solution disappears altogether. Upon then decreasing the light intensity, the trivial solution can be continued up to \(I^{\ast}\), where it merges with the unstable bent solution. In the interval between \(I^{\ast}\) and \(I_{\ast}\) there are three equilibria, the trivial solution and two bent solutions; our elementary stability taxonomy is not sufficient to cover all cases: we then call metastable the solution with intermediate energy, and stable (as before) the one with the least energy (see Fig. 9). One bent solution is stable in \((I^{\ast},I_{\mathrm{e}})\) and the trivial solution is metastable, whereas the trivial solution is stable in \((I_{\mathrm{e}},I_{\ast})\) and the same bent solution is metastable. In both intervals one bent solution is always unstable, the one that merges with the trivial solution at \(I^{\ast}\). The intensities \(I^{\ast}\) and \(I_{\ast}\) delimit a hysteresis loop, which encloses the intensity \(I_{\mathrm{e}}\) where the stable bent solution has the same energy as the trivial solution; there a first-order shape transition takes place, which could be seen as an abrupt snapping back and forth of the ribbon.

Bifurcation diagram for \(l/h=10\). The intensities marked \(I_{0}\), \(I^{\ast}\), \(I_{\mathrm{e}}\), and \(I_{\ast}\) correspond to those shown in the right graph in Fig. 8. As the intensity is increased from zero, at \(I_{0}\) the trivial solution becomes unstable and a bent solution bifurcates up from \(\vartheta =0\). At \(I^{\ast}\), the trivial solution enters the scene again, but here has higher energy than the bent solution. Both solutions have equal energy at \(I_{\mathrm{e}}\), and for intensities above \(I_{\ast}\) no bent solution exists any more
The picture is similar for all values of \(l/h>l_{\mathrm{c}}/h\). As an example, we show in Fig. 10 the bifurcation diagram for \(l/h=20\). For \(l/h< l_{\mathrm{c}}/h\), there is literally nothing to see: no bent solutions exist for any value of the intensity.

Bifurcation diagram for \(l/h=20\). The structure is the same as in Fig. 9. The relatively longer ribbon here leads to a bent solution that both occurs at a lower intensity and is sustained for higher intensities. Also, the maximum angle is closer to \(\pi /2\)
Finally, we show in Fig. 11 numerically computed solutions of the Euler-Lagrange equation (60) satisfying the boundary conditions (57). The parameters used are \(\mu =1/10\) and \(l/h=10\) for a range of intensities between \(I=1.25\) and \(I=8.25\), as shown. The angles of the ribbon on its right end coincide with the values of \(\vartheta _{\mathrm{m}}\) shown in Fig. 9.

Ribbon profiles for varying intensities with \(\mu =1/10\) and \(l/h=10\). Without illumination, the ribbon occupies the entire space on the \(y_{1}\) axis between zero and one. When the illumination intensity exceeds a threshold value, the ribbon begins to extend upwards. With increasing intensity, the ribbon first extends further up before reaching a maximum height. For even higher intensities, the height first decreases before the ribbon eventually snaps back to the \(y_{1}\) axis. In the final picture shown, the ribbon is back on the \(y_{1}\) axis but does not reach the point \(y_{1}=1\) because for \(I>0\) also \(\lambda >1\)
5 Conclusions
We presented a continuum model for photoresponsive elastomers, whose deformation is driven by illumination. The (dynamical) interaction of light with a nematogenic polymer network (hosting photoresponsive molecules) was described within the statistical mechanics model of Corbett and Warner [6, 7].
Light is responsible for a change in shape of photoresponsive molecules, which, once activated, deplete the nematic phase, and so have an effect on the nematic scalar order parameter \(S\). This is what makes these materials different from ordinary nematic elastomers, where a change in \(S\) is thermally induced. The spontaneous deformation that ensues photoactivation is likely to change illumination conditions, and this in turn may either enhance or hamper deformation.
Our main objective was to study the equilibrium of a ribbon illuminated at right angles on one face in its undeformed configuration. To this end, we performed the reduction of the total free-energy functional to a thin planar sheet and applied our reduced theory to a ribbon with a realistic choice of physical parameters collected from the specialized literature. We found the equilibrium configurations of the illuminated ribbon with the nematic director frozen along its longer side and represented in closed form their bifurcation scenario.
We proved that the activation process is neither linear nor monotonic: the deflection of an activated ribbon first increases as expected, but then decreases before vanishing abruptly upon increasing the light intensity \(I\) above a critical value \(I_{\mathrm{e}}\), where the ribbon undergoes a first-order shape transition. A hysteresis cycle is present about \(I=I_{\mathrm{e}}\), featuring two metastable configurations of the ribbon. Our bifurcation analysis has also shown that for a given length of the ribbon there is an optimal value of \(I\) for which the deflection is maximized.
We have limited our analysis to simple solutions with monotonically increasing profile. However, the abrupt shape transition at the critical intensity \(I_{\mathrm{e}}\) cannot be avoided by allowing more intricate, non-simple solutions: these would have a higher energy than the simple bent solution, which in turn already has higher energy than the trivial solution in the interval \((I_{\mathrm{e}},I_{\ast })\) before disappearing at \(I_{\ast }\).
While deflections and displacements are generally large, dilations and contractions in an illuminated ribbon remain small. However, there is a critical length of the ribbon (depending only on the degree of cross-linking in the material) below which no deflection can be promoted by light, no matter how intense this is: the system is too stiff to gain energy by bending.
Heuristically, the non-monotonic response of an illuminated ribbon, with its abrupt fall, could be explained by the coupling between the cis-population fraction \(\phi \) and the illumination angle that the direction of propagation of light \(\boldsymbol{k}\) makes with the nematic director \(\boldsymbol{n}\) (tangent to the ribbon’s longer side in our case). We remarked that for \(S>0\) this coupling is most effective when \(\boldsymbol{k}\) and \(\boldsymbol{n}\) are orthogonal; when the spontaneous deformation reduces the illumination angle, photoactivation is reduced, resulting in a negative feedback.
In more mundane terms, we may say that when activating a ribbon with light, we should be gentle: too high an intensity may easily result in no deflection.
Our theory has limitations too. Perhaps the most conspicuous one is the photo-uniformity approximation that has been used at various stages. Since we do not account for partial penetration of light in the ribbon’s cross-section, deflection either towards light or away from it would have precisely the same energy cost. That deflection actually takes place towards light (as experimentally observed) should be inferred from ad hoc extrinsic considerations. Attempts have recently been made to account for the consequences that partial penetration of light has for the spontaneous deformation of thin flat bodies [8, 38].
Actually, a non-monotonic effect of light intensity upon deformation was also found in [8], but it was predicted to vanish gradually for very large intensities, not with the abrupt decay shown here. We have found in our simplified approach that very same lack of monotonicity, which can have important consequences in applications. This establishes that partial penetration of light is not solely responsible for it.
Notes
Similar effects could also be imparted on the director \(\boldsymbol{n}\), but they will be ignored in this paper, as here \(\boldsymbol{n}\) will be enslaved to the macroscopic deformation, an assumption which will be further discussed and justified below.
As well as nematic glass, as for example in [15].
\(\mathbf{Q}\) is the deviatoric part of the second-moment distribution of monomer \(\boldsymbol{u}\)’s: \(S=-\frac{1}{2}\) when all \(\boldsymbol{u}\)’s are uniformly distributed in the plane orthogonal to \(\boldsymbol{n}\), while \(S=1\) when all \(\boldsymbol{u}\)’s are aligned with \(\boldsymbol{n}\), and \(S=0\) when all \(\boldsymbol{u}\)’s are isotropically distributed (and \(\boldsymbol{n}\) is undefined), see, for example, Chap. 1 of [40].
An exposition of statistical theories for rubber can be found in the landmark book [50].
An alternative theory building on the bare trace formula is presented in [28], where the existence of an isotropic reference configuration plays a central role.
We shall see shortly below how this difference is accounted for by the choice of a dimensionless model parameter.
See also [52] for the specific case of a thermally activated ribbon, which differs from the optically activated one studied in the following section.
The reader is referred to [56] for an alternative theory for nematic elastomer plates.
In the classical theory of plates, the Kirchhoff-Love hypothesis stipulates that \(\Phi \equiv x_{3}\) (see, for example, [57], for a modern treatment). In [20], the Kirchhoff-Love hypothesis was reformulated in the more general form adopted here and criteria were suggested to identify the function \(\Phi \), none of which delivered exactly the original Kirchhoff-Love form.
A different approach was taken in Sect. 4.2 of [58], where a Koiter-like theory for thin nematic elastomers was proposed based on a representationn for the deformation \(\boldsymbol{f}\) similar to (22) with \(\Phi \equiv x_{3}\) and \(\boldsymbol{\nu }\) replaced by a vector \(\boldsymbol{b}\) to be appropriately determined via a minimum principle. Many other dimension-reduction approximations have been proposed in the literature for both classical and nematic elasticity, either in the presence or in the absence of the constraint of incompressibility. These approximations are mostly based on the method of \(\Gamma \)-convergence (an introduction to which can be found in the book [59]). A vast literature is available; with no attempt at completeness (which would be vain), we mention [60–62] for the compressible classical case and [63–66] for the incompressible one. For nematic elastomers, in addition to [58], the following should also be heeded [67, 68].
Our assumption differs from the requirement that \(\mathbf{C}\) minimizes the stretching content of the energy (to be introduced immediately below). This requirement was enforced, for example, in [68] to justify their metric constraint [see, in particular, their equation (1.6)].
It should perhaps be recalled that both photoresponsive molecules in the trans configuration and photoinert mesogens are treated on the same footing in the reference configuration.
References
Corbett, D., Modes, C.D., Warner, M.: Photomechanics: bend, curl, topography, and topology. In: White, T.J. (ed.) Photomechanical Materials, Composites, and Systems. Wireless Transduction of Light into Work, pp. 79–116. Wiley, Hoboken (2017)
Finkelmann, H., Nishikawa, E., Pereira, G.G., Warner, M.: A new opto-mechanical effect in solids. Phys. Rev. Lett. 87, 015501 (2001). https://doi.org/10.1103/PhysRevLett.87.015501
Eisenbach, C.D.: Isomerization of aromatic azo chromophores in poly(ethyl acrylate) networks and photomechanical effect. Polymer 21(10), 1175–1179 (1980). https://doi.org/10.1016/0032-3861(80)90083-X
Stolbova, O.V.: Calculation of the stationary value of a reversible photodichroism of viscous solutions. Dokl. Akad. Nauk SSSR 149, 84–87 (1963). [Sov. Phys. Dokl., 8, 275 (1963)]
Corbett, D., Warner, M.: Nonlinear photoresponse of disordered elastomers. Phys. Rev. Lett. 96, 237802 (2006). https://doi.org/10.1103/PhysRevLett.96.237802
Corbett, D., Warner, M.: Polarization dependence of optically driven polydomain elastomer mechanics. Phys. Rev. E 78, 061701 (2008). https://doi.org/10.1103/PhysRevE.78.061701
Corbett, D., Warner, M.: Linear and nonlinear photoinduced deformations of cantilevers. Phys. Rev. Lett. 99, 174302 (2007). https://doi.org/10.1103/PhysRevLett.99.174302
Corbett, D., Xuan, C., Warner, M.: Deep optical penetration dynamics in photobending. Phys. Rev. E 92, 013206 (2015). https://doi.org/10.1103/PhysRevE.92.013206
Bladon, P., Terentjev, E.M., Warner, M.: Deformation-induced orientational transitions in liquid crystals elastomer. J. Phys. II France 4(1), 75–91 (1994). https://doi.org/10.1051/jp2:1994100
Warner, M., Gelling, K.P., Vilgis, T.A.: Theory of nematic networks. J. Chem. Phys. 88(6), 4008–4013 (1988). https://doi.org/10.1063/1.453852
Warner, M., Wang, X.J.: Elasticity and phase behavior of nematic elastomers. Macromolecules 24(17), 4932–4941 (1991). https://doi.org/10.1021/ma00017a033
Warner, M., Mostajeran, C.: Nematic director fields and topographies of solid shells of revolution. Proc. R. Soc. Lond. A 474(2210), 20170566 (2018). https://doi.org/10.1098/rspa.2017.0566
Warner, M., Terentjev, E.M.: Liquid Crystal Elastomers. International Series of Monographs on Physics, vol. 120. Oxford University Press, New York (2003)
White, T.J.: Photomechanical effects in liquid-crystalline polymer networks and elastomers. In: White, T.J. (ed.) Photomechanical Materials, Composites, and Systems. Wireless Transduction of Light into Work, pp. 153–177. Wiley, Hoboken (2017)
Modes, C.D., Bhattacharya, K., Warner, M.: Disclination-mediated thermo-optical response in nematic glass sheets. Phys. Rev. E 81, 060701 (2010). https://doi.org/10.1103/PhysRevE.81.060701
Ware, T.H., White, T.J.: Programmed liquid crystal elastomers with tunable actuation strain. Polym. Chem. 6, 4835–4844 (2015). https://doi.org/10.1039/C5PY00640F
Bai, R., Bhattacharya, K.: Photomechanical coupling in photoactive nematic elastomers. J. Mech. Phys. Solids 144, 104115 (2020). https://doi.org/10.1016/j.jmps.2020.104115
Maier, W., Saupe, A.: Eine einfache molekulare Theorie des nematischen kristallinflüssigen Zustandes. Z. Naturforsch. 13a, 564–566 (1958). Translated into English in [71], pp. 381–385
Ozenda, O., Sonnet, A.M., Virga, E.G.: A blend of stretching and bending in nematic polymer networks. Soft Matter 16, 8877–8892 (2020). https://doi.org/10.1039/D0SM00642D
Ozenda, O., Virga, E.G.: On the Kirchhoff-Love hypothesis (revised and vindicated). J. Elast. 143, 359–384 (2021). https://doi.org/10.1007/s10659-021-09819-7
Warner, M., Bladon, P., Terentjev, E.M.: “Soft elasticity”—deformation without resistance in liquid crystal elastomers. J. Phys. II France 4(1), 93–102 (1994). https://doi.org/10.1051/jp2:1994116
Terentjev, E.M., Warner, M., Bladon, P.: Orientation of nematic elastomers and gels by electric fields. J. Phys. II France 4(4), 667–676 (1994). https://doi.org/10.1051/jp2:1994154
Verwey, G.C., Warner, M.: Soft rubber elasticity. Macromolecules 28(12), 4303–4306 (1995). https://doi.org/10.1021/ma00116a036
Verwey, G.C., Warner, M.: Multistage crosslinking of nematic networks. Macromolecules 28(12), 4299–4302 (1995). https://doi.org/10.1021/MA00116A035
Verwey, G.C., Warner, M., Terentjev, E.M.: Elastic instability and stripe domains in liquid crystalline elastomers. J. Phys. II France 6(9), 1273–1290 (1996). https://doi.org/10.1051/jp2:1996130
Anderson, D.R., Carlson, D.E., Fried, E.: A continuum-mechanical theory for nematic elastomers. J. Elast. 56, 33–58 (1999). https://doi.org/10.1023/A:1007647913363
Zhang, Y., Xuan, C., Jiang, Y., Huo, Y.: Continuum mechanical modeling of liquid crystal elastomers as dissipative ordered solids. J. Mech. Phys. Solids 126, 285–303 (2019). https://doi.org/10.1016/j.jmps.2019.02.018
Mihai, L.A., Wang, H., Guilleminot, J., Goriely, A.: Nematic liquid crystalline elastomers are aeolotropic materials. Proc. R. Soc. Lond. A 477(2253), 20210259 (2021). https://doi.org/10.1098/rspa.2021.0259
White, T.J. (ed.): Photomechanical Materials, Composites, and Systems: Wireless Transduction of Light into Work Wiley, Hoboken, New Jersey (2017)
Korley, L.T.J., Ware, T.H.: Introduction to special topic: programmable liquid crystal elastomers. J. Appl. Phys. 130(22), 220401 (2021). https://doi.org/10.1063/5.0078455
Mahimwalla, Z., Yager, K.G., Mamiya, J-i., Shishido, A., Priimagi, A., Barrett, C.J.: Azobenzene photomechanics: prospects and potential applications. Polym. Bull. 69, 967–1006 (2012). https://doi.org/10.1007/s00289-012-0792-0
Ube, T., Ikeda, T.: Photomobile polymer materials with crosslinked liquid-crystalline structures: molecular design, fabrication, and functions. Angew. Chem., Int. Ed. Engl. 53(39), 10290–10299 (2014). https://doi.org/10.1002/anie.201400513
White, T.J.: Photomechanical effects in liquid crystalline polymer networks and elastomers. J. Polym. Sci., Part B, Polym. Phys. 56(9), 695–705 (2018). https://doi.org/10.1002/polb.24576
Ula, S.W., Traugutt, N.A., Volpe, R.H., Patel, R.R., Yu, K., Yakacki, C.M.: Liquid crystal elastomers: an introduction and review of emerging technologies. Liquid Cryst. Rev. 6(1), 78–107 (2018). https://doi.org/10.1080/21680396.2018.1530155
Pang, X., Lv, J-a., Zhu, C., Qin, L., Yu, Y.: Photodeformable azobenzene-containing real polymers and soft actuators. Adv. Mater. 31(52), 1904224 (2019). https://doi.org/10.1002/adma.201904224
Kuenstler, A.S., Hayward, R.C.: Light-induced shape morphing of thin films. Curr. Opin. Colloid Interface Sci. 40, 70–86 (2019). https://doi.org/10.1016/j.cocis.2019.01.009
Warner, M.: Topographic mechanics and applications of liquid crystalline solids. Annu. Rev. Condens. Matter Phys. 11(1), 125–145 (2020). https://doi.org/10.1146/annurev-conmatphys-031119-050738
Korner, K., Kuenstler, A.S., Hayward, R.C., Audoly, B., Bhattacharya, K.: A nonlinear beam model of photomotile structures. Proc. Natl. Acad. Sci. USA 117(18), 9762–9770 (2020). https://doi.org/10.1073/pnas.1915374117
Goriely, A., Moulton, D.E., Mihai, L.A.: A rod theory for liquid crystalline elastomers. J. Elast. (2022). https://doi.org/10.1007/s10659-021-09875-z
Virga, E.G.: Variational Theories for Liquid Crystals. Applied Mathematics and Mathematical Computation, vol. 8. Chapman & Hall, London (1994)
Beer, A.: Bestimmung der Absorption des rothen Lichts in farbigen Flüssigkeiten. Ann. Phys. 162(5), 78–88 (1852). https://doi.org/10.1002/andp.18521620505
Fox, M.: Optical Properties of Solids, 2nd edn. Oxford University Press, Oxford (2010)
Yu, Y., Nakano, M., Ikeda, T.: Directed bending of a polymer film by light. Nature 425, 145 (2003). https://doi.org/10.1038/425145a
Liu, L., del Pozo, M., Mohseninejad, F., Debije, M.G., Broer, D.J., Schenning, A.P.H.J.: Light tracking and light guiding fiber arrays by adjusting the location of photoresponsive azobenzene in liquid crystal networks. Adv. Mat. Opt. Elec. 8(18), 2000732 (2020). https://doi.org/10.1002/adom.202000732
Camacho-Lopez, M., Finkelmann, H., Palffy-Muhoray, P., Shelley, M.: Fast liquid-crystal elastomer swims into the dark. Nat. Mater. 3, 307–310 (2004). https://doi.org/10.1038/nmat1118
Finkelmann, H., Greve, A., Warner, M.: The elastic anisotropy of nematic elastomers. Eur. Phys. J. E 5, 281–293 (2001). https://doi.org/10.1007/s101890170060
Rivlin, R.S.: Large elastic deformations of isotropic materials. I. Fundamental concepts. Philos. Trans. R. Soc. Lond. A 240(822), 459–490 (1948)
Kubo, R.: Large elastic deformation of rubber. J. Phys. Soc. Jpn. 3, 312–317 (1948)
Truesdell, C., Noll, W.: The Non-linear Field Theories of Mechanics, 3rd edn. Springer, Berlin (2004). Edited by S.S. Antman
Treloar, L.R.G.: The Physics of Rubber Elasticity, 3rd edn. Oxford Classic Texts in the Physical Sciences Oxford University Press, Oxford (2005)
Deam, R.T., Edwards, S.F.: The theory of rubber elasticity. Philos. Trans. R. Soc. Lond. A 280, 317–353 (1976). https://doi.org/10.1098/rsta.1976.0001
Singh, H., Virga, E.G.: A ribbon model for nematic polymer networks. J. Elast. (2022). https://doi.org/10.1007/s10659-022-09900-9
Warner, M.: New elastic behaviour arising from the unusual constitutive relation of nematic solids. J. Mech. Phys. Solids 47, 1355–1377 (1999). https://doi.org/10.1016/S0022-5096(98)00100-8
van Oosten, C.L., Harris, K.D., Bastiaansen, C.W.M., Broer, D.J.: Glassy photomechanical liquid-crystal network actuators for microscale devices. Eur. Phys. J. E 23, 329–336 (2007). https://doi.org/10.1140/epje/i2007-10196-1
Sonnet, A.M., Virga, E.G.: Dissipative Ordered Fluids. Theories for Liquid Crystals. Springer, London (2012)
Mihai, L.A., Goriely, A.: A plate theory for nematic liquid crystalline solids. J. Mech. Phys. Solids 144, 104101 (2020). https://doi.org/10.1016/j.jmps.2020.104101
Podio-Guidugli, P.: An exact derivation of the thin plate equation. J. Elast. 22, 121–133 (1989)
Plucinsky, P., Bhattacharya, K.: Microstructure-enabled control of wrinkling in nematic elastomer sheets. J. Mech. Phys. Solids 102, 125–150 (2017). https://doi.org/10.1016/j.jmps.2017.02.009
Braides, A.: \({\Gamma }\)-Convergence for Beginners. Oxford Lecture Series in Mathematics and Its Applications, vol. 22. Oxford University Press, Oxford (2002)
Le Dret, H., Raoult, A.: Le modèle de membrane nonlinéaire comme limite variationelle de l’élasticité non linéaire tridimensionelle. C. R. Acad. Sci. Paris 317, 221–226 (1993). Available at https://gallica.bnf.fr/ark:/12148/bpt6k5808224h/f225.item
Le Dret, H., Raoult, A.: The membrane shell model in nonlinear elasticity: a variational asymptotic derivation. J. Nonlinear Sci. 6, 59–84 (1996). https://doi.org/10.1007/BF02433810
Le Dret, H., Raoult, A.: The nonlinear membrane model as a variational limit of nonlinear three-dimensional elasticity. J. Math. Pures Appl. 73, 549–578 (1995)
Trabelsi, K.: Incompressible nonlinearly elastic thin membranes. C. R. Acad. Sci. Paris 340(1), 75–80 (2005). https://doi.org/10.1016/j.crma.2004.11.005
Trabelsi, K.: Modeling of a nonlinear membrane plate for incompressible materials via Gamma-convergence. Anal. Appl. 4, 31–60 (2006). https://doi.org/10.1142/S0219530506000693
Conti, S., Dolzmann, G.: Derivation of elastic theories for thin sheets and the constraint of incompressibility. In: Mielke, A. (ed.) Analysis, Modeling and Simulation of Multiscale Problems, pp. 225–247. Springer, Berlin (2006). https://doi.org/10.1007/3-540-35657-6_9
Conti, S., Dolzmann, G.: \({\Gamma }\)-Convergence for incompressible elastic plates. Calc. Var. 34, 531–551 (2009). https://doi.org/10.1007/s00526-008-0194-1
Cesana, P., Plucinsky, P., Bhattacharya, K.: Effective behavior of nematic elastomer membranes. Arch. Ration. Mech. Anal. 218, 863–905 (2015). https://doi.org/10.1007/s00205-015-0871-0
Plucinsky, P., Lemm, M., Bhattacharya, K.: Actuation of thin nematic elastomer sheets with controlled heterogeneity. Arch. Ration. Mech. Anal. 227, 149–214 (2018). https://doi.org/10.1007/s00205-017-1167-3
Eisenbach, C.D.: Effect of polymer matrix on the cis-trans isomerization of azobenzene residues in bulk polymers. Makromol. Chem. 179, 2489–2506 (1978). https://doi.org/10.1002/macp.1978.021791014
Serra, F., Terentjev, E.M.: Nonlinear dynamics of absorption and photobleaching of dyes. J. Chem. Phys. 128, 224510 (2008). https://doi.org/10.1063/1.2937455
Sluckin, T.J., Dunmur, D.A., Stegemeyer, H.: Crystals That Flow. Taylor & Francis, London (2004)
Author information
Authors and Affiliations
Contributions
A. M. Sonnet and E. G. Virga contributed equally to this work.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A: About the Corbett-Warner Model
Appendix A: About the Corbett-Warner Model
In this Appendix, which has a pedagogical character, we give details about the statistical model by Corbett and Warner presented in Sect. 2. Its contents are derived, with minor modifications and adaptations, from [6] and [17] (see also [52]).
1.1 A.1 Step Tensors
A polymer strand in the reference configuration is represented as a chain of \(N\) rigid rods, each of length \(a\), freely jointed one to the adjacent ones, so that the orientation \(\boldsymbol{u}_{i}\in \mathbb{S}^{2}\) of the \(i\)th rod is completely independent from the orientation \(\boldsymbol{u}_{j}\in \mathbb{S}^{2}\) of any other rod with \(j\neq i\).Footnote 14
The span vector vector \(\boldsymbol{R}_{0}\) joining the ends of a strand is thus defined as
and the step tensor \(\mathbf{L}_{0}\) is correspondingly given by
where the brackets \({\left \langle \cdots \right \rangle }\) denote ensemble averaging, as in the main text. By the mutual independence of rods, also in view of (1) written for \(\mathbf{Q}_{0}\) and (A.2), we readily arrive at
Use of the uniaxial representation for \(\mathbf{Q}_{0}\) in (A.3) leads us straight to (4a) and (5). It is perhaps worth noting that for \(\mathbf{Q}_{0}=\boldsymbol{0}\), which represents the isotropic distribution, \(\mathbf{L}_{0}=a\mathbf{I}\), which accordingly represents a globule of radius \(a\), thus justifying the scaling in definition (A.2).
To give the principal chain steps \((\ell _{\perp },\ell _{\parallel })\) featuring in (4b) the expressions in (6) we must recall that in the present configuration rods of different lengths coexist in one and the same polymer strand, while obeying different statistics: photoinert rods of length \(a\) are in the nematic phase, whereas photoactivated rods of length \(b< a\) are in the isotropic phase. Letting \(\phi \) be the number fraction of the latter, there will be \((1-\phi )N\) rods of length \(a\) and \(\phi N\) rods of length \(b\), so that the span vector \(\boldsymbol{R}\) can be written as
where \(\boldsymbol{u}_{i}\in \mathbb{S}^{2}\) and \(\boldsymbol{v}_{j}\in \mathbb{S}^{2}\) are unit vectors along photoinert and photoactivated molecules, respectively. Now, \(\boldsymbol{u}_{i}\) and \(\boldsymbol{v}_{j}\) are clearly independent from one another, so that for \(\boldsymbol{u}\) and \(\boldsymbol{v}\) representative of their ensembles,
Moreover, the \(\boldsymbol{v}\)’s are assumed to be distributed isotropically,
and the \(\boldsymbol{u}\)’s uniaxially,
with \(\mathbf{Q}\) as in (2). Making use of all equations (A.5a)–(A.5c) to evaluate the average \({\left \langle \boldsymbol{R}\otimes \boldsymbol{R} \right \rangle }\) from (A.4) and normalizing \(\mathbf{L}\) to the length \(Na\) of the unirradiated polymer, precisely as in (A.2), we readily arrive at equations (4b) and (6) in the main text.
1.2 A.2 Equilibrium cis-Population
We follow [5, 6], in the reinterpretation given in [17], to calculate the number fraction \(\phi \) of photoresponsive molecules in the cis-state resulting from a dynamical equilibrium between forward and backward isomerizations.
Let \(N\) be, as above, the total number of monomers in a polymer strand and let \(A\) be the fraction of photoresponsive molecules among them. Thus, denoting by \(N_{\mathrm{t}}\) the number of trans-molecules and by \(N_{\mathrm{c}}\) the number of cis-molecules, conservation of mass requires that
The forward reaction rate \(r_{\mathrm{t\to c}}\) is proportional to the product of \(N_{\mathrm{t}}\) and the average projected light intensity along the molecular direction \(\boldsymbol{u}\),
where \(\Gamma \) is a constant, \(\boldsymbol{E}=E\boldsymbol{e}\) is the wave electric field, and the average \({\left \langle \cdots \right \rangle }_{\mathrm{t}}\) should only be computed on the trans-molecules. However, since the latter obey the same statistics as all nematogenic molecules, the partial trans-average is just the same as the full average,
The thermally induced backward reaction has a rate simply proportional to \(N_{\mathrm{c}}\),
where \(\tau \) is a thermal relaxation time. Equilibrium requires that \(r_{\mathrm{t\to c}}=r_{\mathrm{c\to t}}\). Inserting (A.9), (A.8), and (A.7) into this equality, we easily see that
where \(I\) is as in (10) with
To obtain (7) from (A.10), it now suffices to observe that
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sonnet, A.M., Virga, E.G. Model for a Photoresponsive Nematic Elastomer Ribbon. J Elast (2022). https://doi.org/10.1007/s10659-022-09959-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10659-022-09959-4