
Abstract
The modern, ever shorter development process of powertrains incorporates many disciplines of mechanical engineering. Among these, the dynamic and acoustic behavior—which is often referred to as noise, vibration, harshness (NVH)—is becoming increasingly important for the consumer’s purchase decision. However, NVH is often only considered in the last steps of the product development as both experimental analysis methods and high-fidelity modeling approaches are time-consuming. In contrast, in early phases of the development process, fast iteration cycles are crucial. Thus, the engineer needs appropriate NVH models for each phase of the development process in order to evaluate design and concept decisions with respect to their NVH implications.
This publication shows a methodological guide on how to apply suitable NVH models forward directed in different stages of the development process and thus efficiently implement optimizations. In the early, highly iterative phases of the development process, analytical determination of the excitation behavior as well as simplified finite element simulations are carried out in order to estimate the vibration behavior of the concept. For the first elaborated geometries, frequency response functions can then be determined and thus the influence of e.g. ribbings to NVH behavior can be evaluated. In the later phases, where advanced simulation models have to be set up, a fully parameterized eMBS model of the drivetrain enables an analysis of its operating behavior, from which further optimization potential of the system can be derived. The proposed method is demonstrated on the example of a tractor transaxle development process.
Zusammenfassung
Der moderne, immer kürzer werdende Entwicklungsprozess von Antriebssträngen umfasst viele Disziplinen des Maschinenbaus. Unter anderem wird das dynamische und akustische Verhalten – oft auch als Noise, Vibration, Harshness (NVH) bezeichnet – immer wichtiger für die Kaufentscheidung des Verbrauchers. NVH wird jedoch oft erst in den letzten Schritten der Produktentwicklung berücksichtigt, da sowohl experimentelle Analysemethoden als auch High-Fidelity-Modellierungsansätze zeitaufwendig sind. In frühen Phasen des Entwicklungsprozesses hingegen sind schnelle Iterationszyklen entscheidend. Daher benötigt der Ingenieur für jede Phase des Entwicklungsprozesses geeignete NVH-Modelle, um Design- und Konzeptentscheidungen hinsichtlich ihrer NVH-Implikationen zu bewerten. Diese Publikation zeigt einen methodischen Leitfaden, wie sich geeignete NVH-Modelle in verschiedenen Phasen des Entwicklungsprozesses anwenden lassen und somit Optimierungen effizient umgesetzt werden. In den frühen, stark iterativen Phasen des Entwicklungsprozesses werden analytische Ermittlungen des Anregungsverhaltens sowie vereinfachte Finite-Elemente-Simulationen durchgeführt, um das Schwingungsverhalten des Konzepts abzuschätzen. Für die ersten ausgearbeiteten Geometrien können dann Übertragungsfrequenzgänge bestimmt und damit der Einfluss von z.B. Verrippung bis hin zum NVH-Verhalten ausgewertet werden. In späteren Phasen, in denen fortgeschrittene Simulationsmodelle aufgebaut werden müssen, ermöglicht ein vollständig parametrisiertes eMBS-Modell des Antriebsstrangs eine Analyse seines Betriebsverhaltens, aus der weitere Optimierungspotentiale des Systems abgeleitet werden können. Das vorgeschlagene Verfahren wird am Beispiel eines Traktortransaxle-Entwicklungsprozeses demonstriert.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The purchase decision of consumers of drive systems is significantly influenced by the subjective criterion of acoustic perception [1]. Consequently, the prediction and optimization of acoustic and structural dynamic behavior, also known as noise, vibration and harshness (NVH), must be an elementary part of product development. In order to reduce the high costs of developing and analyzing physical prototypes, simulation methods such as the finite element method (FEM) or elastic multi-body simulation (eMBS) have been established for the prediction and optimization of the NVH behavior of drivetrains. However, the increasingly important optimization of NVH behavior is often only considered in the last phases of a development process, whereby geometry or concept changes can only be implemented with great effort. This is due to the fact that NVH is calculated mainly by complex time integration multi-domain models [2,3,4]. Furthermore, as the number of components of a system increases, more physical effects and degrees of freedom must be considered for the simulations, which additionally increases the computing time of NVH models.
Different modeling approaches such as FEM and eMBS for considering NVH behavior of components have been developed in the past years which differ considerably in terms of their required modeling and simulation time, depending on whether linear or nonlinear simulation approaches are used and whether the simulation takes place in time domain or frequency domain. The increasing accuracy of NVH models considering nonlinear effects in time domain compared to simulations in the frequency domain conflicts with the required effort of the simulation. The question therefore arises as to what degree of abstraction an NVH model must have in order to be suitable for considering NVH behavior at any given stage of the development process.
This publication therefore presents a modeling guideline to NVH optimization of powertrains at different stages of its development. In addition to the complex time-domain models, NVH models are used in a forward directed manner in order to implement design decisions for NVH at the beginning of development. For this purpose, analytical approaches, as well as FEM and eMBS models are classified and assigned to different issues and requirements in the development process. This includes the specific phases of development in relation to its necessary accuracy and iteration capability as well as the modeling and simulation time. The method is demonstrated on the geometry-based development process of a tractor’s transaxle where the geometry of previous product is used as the starting point for further optimizations. The results of the simulations are compared with each other and the application of these approaches and models at components or system model level is discussed.
The paper is structured as follows: Sect. 2 will provide an overview of NVH models applicable in a development process as well as a classification of models. Following, a method is presented that enables the targeted application of NVH models in a development process depending on iterability and model accuracy. In Sect. 4 various of these models are presented and their result are compared against each other. In the final chapter a summary of the applied models is given and further development aspects are discussed.
2 State of the art
According to VDI 2221 [5] the development process of a product up to market launch is divided into the definition of goals and requirements as well as conceptualization, design and improvements. In the process, a partially iterative development takes place, which is always based on the state of knowledge of previous iterations. The state of development and knowledge at the beginning of a development process does not necessarily require a completely new conception of a product. Rather, it can be a design adaption, i.e. a product design on the basis of a predecessor model [5]. Such a design adaption will be considered in the following, where NVH models are applied to an existing concept depending on the required iteration capability and model accuracy. For the evaluation of the NVH behavior of a structure, it is necessary to determine the structure-borne sound of the system based on dynamic excitation forces which depend on the machine structure and the transfer behavior of the structure surrounding the excitation source. Subsequently, the emitted airborne sound can be determined on the basis of the surface velocities of the structures [6, 7].
Modeling approaches for assessing the NVH behavior of components and systems are distinguished between approaches, such as torsional vibration analysis or analytical approaches, which are unsuitable for higher frequencies and mainly used for excitation analysis, and those approaches which determine the structural dynamic behavior of a three-dimensional system. Latter can generally be distinguished by their domain (time or frequency domain) and their numerical approach (FE or eMBS) as shown in Fig. 1. The finite element method discretizes any continuum through subregions, also called finite elements. These elements are described by approach functions between the nodes. Each node represents a degree of freedom of the system under consideration, whose structural dynamic behavior can be described by a local equation of motion [8, 9]. In FEM, an eigenfrequency analysis and harmonic excitations can be simulated in order to assess the structural dynamic behavior of the system. Since these methods usually use linear approaches, these simulations have short computing times. When considering more complex systems with a large number of components and degrees of freedom simulating in time domain is not computational efficient with FEM. Therefore, it is customary to perform a modal reduction of the geometries in order to determine the main degrees of freedom relevant for the structural dynamic behavior and to reduce the system to them [9,10,11]. Subsequently, the interactions between components at the overall system level can be defined in the eMBS and thus the structural dynamic behavior of the system can be determined in a computationally efficient manner [4].

Application of NVH models for simulating structural dynamic behavior. ( EF Eigenfrequency, FRF Frequency Response Function )
Furthermore, nonlinear effects, such as that of rolling bearings, which is determined by bearing clearance and hertzian contact stiffness, can only be simulated in time domain. Gear excitations of a gearbox are modeled, for example, using an approach according to Weber and Banaschek [12]. This approach makes it possible to model the torque and the nonlinear stiffness of the gearing as a function of the rolling position. In addition, interactions with other simulation domains such as controls or electromagnetic force maps can also be modeled. Thus, it is possible to simulate various physical effects and excitation sources of a drivetrain in the eMBS and to determine the operational NVH behavior, which is associated with a high modeling effort and with increasing number of considered effects and components with high time effort [4, 10, 13, 14].
Based on the requirements of a phase within the development process, there is a mutual conflict between the required iteration capability and the model accuracy of a simulation approach. In order to define this interaction more precisely and to derive criteria for the appropriate application of a simulation, models can be classified by using a three-dimensional framework that consists out of model purpose, model scope and modeling fidelity (s. Fig. 2). According to [15] defining a model purpose enables the description of the solution in scope and thus identifying modelling approaches with increasing model accuracy.

Order matrix of purpose, scope and fidelity [14]
Bringing the above mentioned NVH modeling approaches as well as the classification scheme together, on model purpose could be calculating its emitted noise. Further, the system scope defines which boundary conditions regarding the system level with its corresponding subsystems of the drivetrain under investigations and thus which physical effects and interactions should be used for the simulation model. The third axis defines the modeling fidelity that could be used to fulfill the model purpose. This includes analytical and numerical approaches like one dimensional substitute systems or three-dimensional FE or eMBS models with various fidelity levels. However, by increasing the modelling fidelity and system scope the estimated modeling and simulation effort increases. In order to make a qualified statement about the combined development effort [15] provides a method for calculating the needed modeling and simulation time for various NVH models. Thereby a suitable NVH model can be applied to all phases of a development process depending on the available time interval and state of information or data for each development iteration. However, there is no classification as to when which NVH-model should be used most efficiently for which question.
3 NVH models for different development phases
In order to supply a suitable NVH modeling approach for different phases of the development process, the NVH modeling approaches presented in Chap. 2 are first classified according to scope, purpose and fidelity level. The purpose of the NVH models in the following always is related to the identification of structure-borne sound. Next, the system scope is defined. Thus, it plays an essential role whether a single component with few degrees of freedom or whether several components with physical interactions is to be modeled and therefore effect the iteration capability of a simulation. Furthermore, the property of the physical effect is decisive for the selection of the simulation method, since e.g. eigenfrequency analyses or harmonic excitations cannot consider nonlinear effects. Subsequently, the choice of the simulation method, the number of considered effects and degrees of freedom as well as the simulation domain (time or frequency domain) define the model accuracy that fulfills the model purpose.
A high iteration capability is required at the beginning of a development process. Therefore, the eigenfrequency analysis of single components with the aid of the FEM is suitable due to its low simulation time of several minutes. When considering a channel and support structure, the effects on the dynamic behavior of the structure, caused by the mass and stiffness distribution, can be determined by adding point masses or springs (s. Fig. 3). If a higher model accuracy is required in the further course of development, harmonic analyses can be carried out on individual components in order to determine the FRF’s of the system and to be able to evaluate how the amplitude of a surface reinforced with ribs develops. In this case the simulation time increases but is usually in the range of minutes or a few hours as shown in Fig. 4. In general, the simulation model for the harmonic analysis is based on that of the natural frequency analysis and requires only a small amount of additional modeling time. Although these are linear methods, it is relevant for the development process to know the actual excitations of the powertrain and to take them into account for the simulations. In this context, an excitation analysis of the entire system can be performed on the basis of analytical equations and the powertrain concept. Before using the simulation method of eMBS, several components or the entire system can be modeled in FEM for further increase of model accuracy. Thus, the structural dynamic behavior of coupled components can be evaluated and optimizations can be performed. To achieve a very high model accuracy, the powertrain must be simulated in the eMBS, since the structure-borne noise of the system only here can be simulated in an acceptable computation time. This requires a high modeling effort and simulation time, so that the iterability of such a model is very low and can take up to weeks. Consequently, the consideration of individual components in the eMBS cannot be justified by the increased modeling fidelity. Furthermore, by modeling a wide variety of machine elements such as bearings or gears, more accurate natural frequencies and FRF’s can be determined in the eMBS. These can now additionally be calculated for the system in the braced state, which in turn increases the model accuracy. Finally, the simulation of the operating behavior of the drivetrain and the resulting NVH behavior represents the model with the highest model accuracy and the lowest iterability, so that this model would most likely be used in the final stages of the development process.

Classification of NVH models with purpose of simulating structure-borne sound

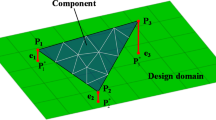
Design sections used for NVH optimization
In the following, Chap. 4 shows the application of these models and demonstrates that the respective models have sufficient model accuracy despite their partly high degree of abstraction.
4 Evaluation of the applied NVH models
In this paper, a power-split drivetrain consisting out of multiple components such as pumps, differential gears, hydro module, mechanic module and housing is considered, see Fig. 5. Common NVH models like eigenfrequency analysis, harmonic analysis for determining frequency response functions (FRF) and eMBS for time integration are used to optimize its NVH behavior.

Tractor’s drivetrain structure
The NVH behavior of the studied drivetrain is dominated by the excitations of the hydrostatic components in the hydro module which form the hydrostatic part of the power-split drive train. The structure-borne sound is then transmitted through the surrounding housing structure and either on to the cabin (structure-borne transfer path) or radiated as air-borne sound from the surfaces of the housing.
Within the studied example process, the drivetrain has been developed based on a previous design which has been adapted to incorporate stricter restrictions on the spatial dimensions of the drivetrain. The studied development process therefore was geometry-driven and at the beginning highly iterative. During the course of the development process, the following issues were addressed, which are listed in Table 1 and associated to the generalized design decision from Fig. 4.
The three cases listed in Table 1 are examined in greater detail in what follows. Firstly, the bearing support of the differential’s pinion is discussed due to the proximity to the power flow between rotating and stationary components. The optimization of the support structure of the bearings was discussed during early phases of the development, before the detailed geometry of the housing was defined. Its main aim is to optimize the flow of forces from the bearing support to the flange surfaces of the housing. As the optimization happened in early phases of the development (see also Fig. 4), iteration cycles were short so that an only fast running models which could quickly be build were permissible. This limited the scope to component-based analysis in FE which can be quickly carried out based on the geometry of the design. In order to keep iterations fast and to reach an optimized result within days, the calculation time was also restricted which only allowed for a fast calculation of eigenfrequencies. An additional calculation of frequency response functions (FRFs) to quantify the excitability would not have allowed to deduce further information about the system’s stiffness while adding additional model building and calculation effort, so that only eigenfrequencies were calculated. Therefore, the approach suggested in Fig. 4 for support structures seemed suitable and was adopted. In total 10 iterations were carried out to optimize the housing’s support structure.
The first three resonating modes of the original design of the surrounding housing to support the bearings are shown in Fig. 6.

Resonating modes of the original bearing support
Due to large amplitudes of the first three mode shapes the original design is very complaint and therefore not suitable to transfer the bearing forces to the surrounding structures. The large deformation of the outer surfaces favors the emission of noise and therefore should be reduced. This example demonstrates, that it is useful to start optimizing the individual components with respect to their NVH behavior already during the early phases of the development, as NVH models are also suitable to aid in the design process of supporting structures. Therefore, to optimize the support structure, the stiffness of the overall system was increased by connecting the dome with the bearings to the sides of the housing, see Fig. 7a. The first mode shape (depicted in Fig. 7b) shows the stiffer design of the housing with additional ribs within the housing. This increased the eigenfrequencies of the first thee modes by 10.4% on average. However, this is a quantitative statement, since the necessary stiffening and thus shifting of the natural frequency depends on the respective requirements and operating conditions of the machine element. Furthermore, the excitability of the modes was reduced which can be seen by the lower amplitude of the mode shapes at the bearing seats. It needs to be highlighted here, that only simplified geometries were used to model the interactions in order to keep the modeling time low. One eigenfrequency of the model requires around 9 min of computation time. Within the limitations of fast iteration cycles, the models were still sufficiently accurate to evaluate the qualitative influence of design changes with respect to the NVH behavior as the change in the housing’s stiffness influenced its eigenfrequencies. However, no quantitative evaluation can be carried out using this technique, as neither the excitations are considered, nor is the criticality of individual modes evaluated using harmonic excitations.

Resonating modes of the adjusted bearing support
Additionally, the evaluation of eigenfrequencies and their corresponding mode shapes when optimizing individual components can be of greater use when applied together with analytical excitation models as shown in Fig. 4. Especially campbell diagrams, which visualize the excitation frequencies of the system based on the system’s operating condition (i.e. rotational speed of rotating parts) allows to identify acoustically critical frequency ranges, in the number of modes with large oscillations of the radiating surfaces should be minimized. The campbell diagram for the studied system is shown in Fig. 8.

Campbell diagram at operating engine speed
Secondly, the ribbing design of the sound radiating surfaces was studied. This serves as an example for a design decision which occurs during a later stage of the development process, where the support structures and the interfaces between components are designed. During this phase, the geometry of the individual components is defined in detail. For this detailed analysis, the interaction between the structures need to be considered, but iterations still should not take significantly longer than for the design of the support structures. Therefore, a frequency-domain approach has to be chosen to keep calculation times low and to allow for several design iterations. However, to define dimensions of the design, modeling methods should be used which allow for a quantifiable comparison between different design proposals. Therefore, frequency-domain harmonic analysis in FEM of the assembly of all housings are chosen, which calculates the frequency-dependent deformation of various structures under the same load while continuing to use partial models that have already been generated in order to keep the iteration time short. By reducing the deformation of a surface, the surface speed also decreases and thus the emitted sound pressure. Any surface can thus be understood as a sound source. Considering all sound sources of a structure, the room-dependent sound power can also be determined, which is usually used to evaluate the emitted airborne sound. However, with regard to the iteration capability of a model, the post processing’s also play a decisive role. Therefore, a further consideration of the sound level and sound power was not considered here due to the low modeling fidelity.
An example of the ribbing design is shown for the largest surface, which is the top surface of the middle housing surrounding the hydro module. The original design without any ribs or point masses exhibits its first eigen mode at below 500 Hz which is well within the range of acoustic excitation of the hydro module, see Fig. 9.

Acoustic excitation of the tractor’s hydro module
Therefore, three conceptual designs were compared, see Fig. 10. The geometric dimension of the ribs was based on analytical models in terms of text book guidelines. Secondly, the geometric dimensions of the ribs were a numerical DoE and a height of four times the wall thickness, a width equal to the wall thickness and a distance of six times the wall thickness of the cast housing was being found to have the optimal effect.

Design studies of housing structures
The cross-ribbing design was found to have the highest influence of the resonating frequencies up to 1 kHz (+ 5 to 10% depending on the mode shape). Further harmonic analysis showed a reduction of the excitability of the central point of 7 dB on average in the frequency range of up to 800 Hz. It could therefore be shown, that although abstract designs of ribs were used, a suitable design could be identified which was subsequently incorporated into the housing considering casting requirements. The presented approach allows for a quantifiable comparison between different designs while still keeping calculation times low. One iteration took less than 2 h to calculate and by parallelizing different designs, sufficiently fast iterations could still be achieved although the modeling times were higher than for the component model shown in Fig. 7 because more parts have to be meshed and interactions have to be defined. Comparing the three designs to one another only required three calculations (compared to 10 iterations for the design of the support structure) so that longer calculation times are acceptable when choosing a ribbing concept.
Lastly, the operation behavior of the entire system is analyzed to derive further optimization potential. This step is conducted at the end of the development process to evaluate design choices taken during the development process on a reduced scope (i.e. when considering only components or sub-assemblies) with respect to the interaction in the system. At this stage, iterations are slow and longer modeling and calculation times are permissible, see Fig. 4. At this point, all geometric details have been fixed in a first draft and the interaction of a first virtual prototype can be considered with respect to its NVH behavior. On the other hand, the NVH model should be able to predict the dynamic behavior under operating conditions at this late stage of the development process before the first physical prototype is built in order to ensure its compliance with NVH requirements. Therefore, the scope of the NVH model should include the entire system and a high fidelity approach including nonlinear effects in time-domain and absolute amplitude of excitation mechanisms should be considered. These requirements are only fulfilled by an eMBS model of the entire drivetrain system, as shown in Fig. 4. Therefore, an eMBS model of the drivetrain was developed, see Fig. 11.

Drivetrain eMBS model
It contains nonlinear bearing models based on Hertzian contact, linearized gear mesh stiffnesses for the spur gears, gear mesh excitations according to a load-dependent Weber-Banaschek approach for the bevel gear stage and time-domain excitations of the hydrostats which are based on the kinematics of the drivetrain and approximations for the pressure fluctuation of the hydrostat from measurements of a previous prototype. The model was solved in time-domain to account for the non-linear excitations of the bevel gear. The calculation of the entire rpm range required two weeks of calculation. As a result, iterations of the powertrain for the optimization of operating conditions or noise is no longer suitable with such modeling and simulation effort. The model however is suitable to deduce further optimization potential which can then be evaluated again on the component level in several iterations such as dampers or brackets that connects the drivetrain to the drivers cabin.
The structure-borne sound at the front left cabin bracket is shown depending on the pinion’s rpm in Fig. 12. However, the specified acceleration levels only represent relative values. A very dominant resonance band can be observed, which can be attributed to the compliance of the cabin bracket and the fixation of the cabin bracket to the housing. An optimized design was developed and evaluated in frequency-domain analysis of the structure-borne transfer path from the excitation to the cabin bracket position. A reduction of 4 dB acceleration level was achieved by adding additional mass to each cabin bracket. The entire simulation took around two weeks of calculation time. These long simulation times show how the eMBS simulation is a powerful tool to identify additional potential for optimization, however, iterations are not possible on these designs. Therefore, optimization of the appropriate cabin bracket was again done in the FE domain to increase its stiffness.

Structure-borne sound at the front left cabin bracket
The application example of the tractor drivetrain shows exemplarily, how different NVH models can be used to optimize systems during different phases of the development process: When fast iterations are required at the beginning of a development process, only linearized eigenfrequency analysis in FE have a sufficiently low model building and model execution time to allow for NVH-based design choices during the iteration cycles. These eigenfrequency analysis are still sufficiently accurate to evaluate the structure’s compliance and therefore update the support structure. With increasing geometric details involved in the design choices, such as ribbings, more details frequency-domain analysis can be carried out, increasing the scope to the entire drivetrain and including methods such as harmonic analysis. An analysis of the entire system in time-domain in eMBS is useful once a viable design has been developed to analyze the interactions between the components under different loads and excitations and to quantify the non-linear behavior of the system.
The developed method aids the design engineer in choosing suitable NVH models considering both restrictions with respect to model building and calculation time as well as desired accuracy of the result. It is however only valid for a geometry-driven development process which requires the existence of previous designs to base iterations on. For a development process for a completely new design which starts by defining function structure and interactions without considering geometric properties, the application of this method is limited because NVH properties are significantly influenced by stiffness and mass distribution as well as excitation behavior. To apply the presented method to such a new development, topology generation and optimization would be required to automatically transfer function-based solutions into geometric designs, befor NVH optimizations could be deduced. Furthermore, the presented approach of using simplified geometries to study the NVH influence of different designs does not account for manufacturing restrictions imposed on the geometry. The presented method therefore can only be used to evaluate geometrical concepts with respect to NVH implications which then need to be further refined into a final version in discussion with experts considering e.g. casting, spatial restrictions on the part and weight limits on the entire assembly. The method can on the other hand be very easily used to evaluate a final design considering all restrictions again with respect to the NVH implications, both at late stages of the development process using eMBS models as well as during fast iterations with the simplified methods such as FEM eigenfrequency and harmonic analysis of individual components.
5 Summary and outlook
The purchase decision of consumers of drive systems is significantly influenced by the subjective criterion of acoustic perception [1]. Consequently, the prediction and optimization of acoustic and structural dynamic behavior, also known as noise, vibration and harshness (NVH), must be an elementary part of product development. In order to aid the NVH engineer in choosing appropriate NVH models during different phases of the development process, a guideline is presented which allows for the identification of requirements from the development process such as iteration capability (i.e. modeling and execution time) and fidelity level of the design decision.
The presented method consists of a classification of existing NVH simulation models with respect to their scope and fidelity level. This classification is used to match NVH models to the requirements of the development process. The process was demonstrated on the development process of a tractor drivetrain. It has been shown that in early phases of the development, when the Support structure need to be defined during a highly iterative process with iteration cycles lasting usually only several days, component-based eigenfrequency analysis in a finite element (FE) environment are suitable for a rough approximation and optimization of the system’s compliance behavior. Once the overall concept has been fixed, the geometric details of the radiating surfaces have to be defined. Both eigenfrequency analysis as well as harmonic analysis in FE have been proven to allow for a sufficiently fast approximation of the system’s excitability at the sound radiating surfaces. These methods have then been used to deduce a ribbing design of the radiating surfaces. Lastly, when the interaction of the entire system is to be evaluated, eMBS methods are a suitable means for both linearized harmonic analysis as well as nonlinear time-domain analysis. Non-linear time-domain eMBS methods have been demonstrated to be suitable to analysis the structure-borne sound at the boundary points of the system, where it is transferred into surrounding structures such as the cabin. Optimizations of the cabin brackets were deduced based from the eMBS simulations to reduce the structure-borne transfer paths to the operator.
In future works, both the integration of models of different domains (such as electromagnetics or computational fluid dynamics) as well as the sound radiation calculation to obtain air-borne sound and air-borne transfer paths should be added to the presented framework.
References
Genuit K (2010) Sound-Engineering im Automobilbereich: Methoden zur Messung und Auswertung von Geräuschen und Schwingungen. Springer, Berlin, Heidelberg
Drichel P, Wegerhoff M, Schelenz R et al (2014) Modeling an electric vehicle powertrain and analysis of vibration characteristics. In: Proceedings of the Torisional Vibration Symposium
Drichel P, Wischmann S, Berroth J et al (2019) Modellierungsmethodik zur multiaxialen Abbildung des höherfrequenten Übertragungsverhaltens von Elastomerlagern in der NVH-Systemsimulation. In: Jacobs G (ed) 2019 – Antriebstechnisches Kolloqium, 1st edn. Books on Demand, Norderstedt
Jaeger M, Drichel P, Schröder M et al (2020) Die Kopplung elektrotechnischer und strukturdynamischer Domänen zu einem NVH-Systemmodell eines elektrischen Antriebsstrangs. Elektrotech Inftech 137:258–265. https://doi.org/10.1007/s00502-020-00802-z
Verein Deutscher Ingenieure e. V. (2019) Entwicklung technischer Produkte und Systeme – Modell der Produktentwicklung(2221)
Kollmann F (2006) Praktische Maschinenakustik. Springer, Berlin, Heidelberg
Fasold W, Kraak W, Schirmer W (eds) (1984) Taschenbuch Akustik, 1st edn. VEB Verlag Technik, Berlin
Klein B (ed) (2015) FEM-Ansatz für dynamische Probleme: Grundlagen und Anwendungen der Finite-Elemente Methode im Maschinen- und Fahrzeugbau, 10th edn. Springer Vieweg, Berlin
Stelzmann U (ed) (2000) Strukturdynamik, 5th edn. FEM für Praktiker, vol 2. expert, Renningen
Wegerhoff M, Schelenz R, Jacobs G (2015) Hybrid NVH simulation for electrical vehicles II—Strucutral model. DAGA
Clappier M, Gaul L (2018) FE-BE computation of electromagnetic noise of a permanent-magnetic excited synchronous machine considering dynamic rotor eccentricity. Matec Web Conf. https://doi.org/10.1051/matecconf/201821118005
Wegerhoff M, Jacobs G, Drichel P (2019) Noise, vibration and harschness validation methodology for complex elastic multibody simulation models: with applivation to an electrified drive train. J Vib Control 25(2):243–254. https://doi.org/10.1177/1077546318800124
Jaeger M, Drichel P, Müller-Giebeler M et al (2020) Erweiterung NVH Simulationsmodell: Erweiterung der Simulationsmöglichkeiten für maschinenakustische Untersuchungen an E‑Motive-Antrieben im Kontext zur Fahrzeugstruktur, Heft 1370
Jacobs G, Konrad C, Berroth JK et al (2022) Function-oriented model-based product development. In: Krause D, Heyden E (eds) Design methodology for future products. Springer, Cham, pp 243–263
Jagla PK, Jacobs G, Siebrecht J et al (2021) Using SysML to support impact analysis on structural dynamics simulation models. Procedia CIRP 100:91–96. https://doi.org/10.1016/j.procir.2021.05.015
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
J. Müller, G. Jacobs, M. Ramm, S. Wischmann, P. Jagla and J. Berroth declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Müller, J., Jacobs, G., Ramm, M. et al. Model-based NVH optimization of a tractor drivetrain during different phases of a design adaption. Forsch Ingenieurwes 87, 363–373 (2023). https://doi.org/10.1007/s10010-023-00632-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10010-023-00632-3