
Abstract
The object of this paper is the Saint-Venant torsion of a solid elliptical cylinder made of orthotropic homogeneous piezoelectric material. We find the shape of the homogeneous orthotropic piezoelectric elliptical cross section which does not warp under the applied torque. The sizes of the orthotropic piezoelectric solid elliptical cross section, which has the maximum value of torsional rigidity for a given cross-sectional area, are also determined.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Although the Saint-Venant’s torsion of cylindrical bars is a classical one in the field of elasticity, there has recently been growing interest in the context of non-homogeneous, anisotropic and piezoelectric barssee [1,2,3,4,5,6,7,8,9,10]. It must be mentioned that several papers deal also with the problem of uniform torsion of non-homogeneous and/or anisotropic bars such as [11,12,13,14,15,16,17,18,19,20,21].
Application of piezoelectric materials and structures has been increasing recently. Sensors and actuators are examples of active components made of piezoelectric materials which are used widely in smart structures. These structural components are often subjected to mechanical loading. The torsional deformation of these structural members is an important task. The Saint-Venant’s theory of uniform torsion for homogeneous piezoelectric bars has been analyzed in [7,8,9,10, 22]. Bisegna’s papers use the Prandtl’s stress function and electric displacement potential function formulation for simply connected cross section. The work of Davi [22] obtained a coupled boundary-value problem for the torsion function and for the electric potential function from a constrained three-dimensional static problem by the application of the usual assumptions of the Saint-Venant theory. Rovenski et al. [9, 10] give a torsion function and electric potential function formulation of the Saint-Venant torsional problem for monoclinic homogeneous piezoelectric beams. In these papers [9, 10], a coupled Neumann problem is derived for the torsion function and electric potential function, where the exact and numerical solutions for elliptical and rectangular cross sections are presented. Ecsedi and Baksa [23] give a formulation of the Saint-Venant torsional problem for homogeneous monoclinic piezoelectric beams in terms of Prandtl’s stress function and electric displacement potential function. The Prandtl’s stress function and electric displacement potential function satisfy a coupled Dirichlet problem in the multiply connected cross section. A direct and a variational formulation are developed in the paper by Ecsedi and Baksa [23]. In another paper [24], a variational formulation is presented for the solution of Saint-Venant’s torsion problem of homogeneous linear piezoelectric monoclinic beams. The variational formulation presented in [24] uses the torsion function and electric potential function as independent quantities of the considered variational functional defined in [24], and examples illustrate the application of the presented variational functional. Rovenski and Abramovich [25] apply a linear analysis to piezoelectric beams with non-homogeneous cross section that consist of various monoclinic (piezoelectric and elastic) materials. They give the solution procedure for extension, bending, torsion and shear.
The developed method is illustrated by numerical examples. Nodargi and Bisegna [26] presented a solution of the relaxed Saint-Venant problem for general anisotropic piezoelectric beams under the assumption of material homogeneity along the beam axis. The method of the developed solution is based on the observation that the strain field, the electric field, the stress field and the electric displacement field are mostly linear functions of the axial coordinate, see [26]. It must be mentioned that in [26] the solution of the Saint-Venant problem for a general anisotropic homogeneous cylinder with circular cross section has been derived in closed form. Hassani and Fae [27] dealt with a circular bar which is coated by a piezoelectric layer and subjected to Saint-Venant torsional loading. The considered circular bar is weakened by a Volterra-type screw dislocation. Talebanpour and Hematiyan [28] presented an approximate analytical method for the torsional analysis of hollow piezoelectric bars which is based on the Prandtl stress function and on the electric displacement potential function formulation. The paper by Ecsedi and Baksa [29] deals with the Saint-Venant torsion of a radially non-homogeneous hollow and solid circular cylinder made of orthotropic piezoelectric material. All material constants have only radial dependence.
In this paper, the torsional deformation of an orthotropic piezoelectric elliptical bar is studied. The shape of the orthotropic piezoelectric elliptical cross section which does not warp under the applied torque is determined. The size of the orthotropic solid piezoelectric cross section which has the maximum torsional rigidity for given cross-sectional area is also specified.
2 Formulation of the Saint-Venant torsion problem for elliptical cross section
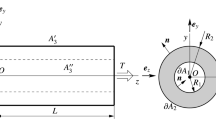
Let \(B=A\times (0,L)\) be a right elliptical cylindrical body of length L made of orthotropic linearly piezoelectric material with axial poling.

Orthotropic piezoelectric elliptical cylinder.
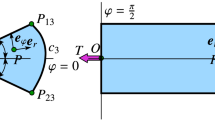
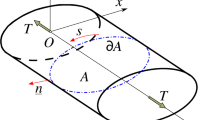
The governing equations of uniform torsion of unelectroded orthotropic piezoelectric elliptical bar are formulated in Cartesian coordinates \(x,\,y,\,z\). The origin of the coordinate system O is the center of the left end cross section of the bar as shown in Fig. 1. The equation of the boundary contour of elliptical cross section A (see Fig. 2) is
where \(\partial A\) denotes the boundary curve of the cross section A. The normal vector \({{\varvec{n}}}\) to the boundary curve \(\partial A\) can be represented as [18, 20]
The principal directions of orthotropy are assumed to be coincide with \(x,\, y\) and z directions, and the material of the piezoelectric beam is homogeneous.

Solid elliptical cross section
The analytical solution of the Saint-Venant’s torsional problem originates from the next displacement and electric potential hypothesis
where \(u,\,v,\,w\) are the displacements in \(x,\,y\) and z direction, \(\vartheta \) is the rate of twist with respect to axial coordinate z, \(\omega =\omega (x,y)\) is the torsion function, \(\varphi =\varphi (x,y)\) is the electric potential function [9, 10]. Application of the strain-displacement and electric field-electric potential relationships (Rovenski et al. [9, 10]) gives
In Eq. (4) \(\varepsilon _{x}\), \(\varepsilon _{y}\) and \(\varepsilon _{z}\) are the longitudinal strains, \(\gamma _{xy}\), \(\gamma _{yz}\) and \(\gamma _{xz}\) are the shearing strains, and in Eq. (6) \(E_{x}\), \(E_{y}\) and \(E_{z}\) are the components of the electric field vector \({\varvec{E}}\). In the present problem, the mechanical equilibrium and Gauss equation can be written in the form
where \(\tau _{xz}=\tau _{xz}(x,y)\) and \(\tau _{yz}=\tau _{yz}(x,y)\) are the shearing stresses and \(D_{x}=D_{x}(x,y)\) and \(D_{y}=D_{y}(x,y)\) are the components of the electric displacement vector. Here, we note that (Rovenski et al. [9, 10])
In Eq. (8) \(\sigma _{x}\), \(\sigma _{y}\) and \(\sigma _{z}\) are the normal stresses, \(\tau _{xy}\) is shearing stress and \(D_{z}\) is the axial component of the electric displacement vector \({\varvec{D}}\). The mantle of the beam is stress and charge-free; that is, we have
Here we note that the Saint-Venant torsion of a piezoelectric beam can be considered as a mixed type three-dimensional boundary-value problem whose boundary conditions are as follows:
The applied mechanical torque T in terms of \(\tau _{xz}\) and \(\tau _{yz}\) can be computed as
Bai and Shield [30] by use of Eqs. (7)\(_{1}\), (9)\(_{1}\) and Eq. (14) proved that
The torsional rigidity \(S_{M}\) of the orthotropic piezoelectric bar poling in direction of axis z is defined by
The shearing stresses \(\tau _{xz}\), \(\tau _{yz}\) and electric displacements \(D_{x}\) , \(D_{y}\) according to the constitutive equations of linear orthotropic piezoelectric bars can be written as
Substitution of Eqs. (17) and (18) into Eq. (7)\(_{1,2}\) gives the following results:
For an elliptical cross section, the boundary condition formulated in Eq. (9)\(_{1,2}\) is as follows:
The standard results from the theory of linear second-order partial differential equation show that the classical (strong) solution to the boundary value problem given by Eqs. (19–22) is unique in two constants. This means that if \(\omega =\omega (x,y)\) and \(\phi =\phi (x,y)\) are a solution, then
are also a solution for arbitrary values of the constants \(K_{\omega }\) and \(K_{\phi }\). The following theorem is valid.
Theorem 1
The solution of Saint-Venant’s torsional boundary-value problem formulated by Eqs. (19–22) is
where
and \(K_{\omega }\) and \(K_{\phi }\) are arbitrary real constants.
A direct substitution of Eq. (24)\(_{1,2}\) into Eqs. (19–22) shows that the functions given by Eq. (24)\(_{1,2}\) with arbitrary constants \(K_{\omega }\) and \(K_{\phi }\) satisfy the torsional boundary-value problem formulated in Eqs. (19–22). In the following, we define \(K_{\omega }=0\) and \(K_{\phi }=0\) according to the statement formulated by Eq. (23).
Substitution of Eq. (24) into the formulae of shearing stresses given by Eq. (17), we obtain
From Eq. (18) and the expression of \(\omega =\omega (x,y)\) and \(\phi =\phi (x,y)\), it follows that
The connection of applied torque T and \(\vartheta \) in the present case can be formulated as
According to the definition of the torsional rigidity \(S_{M}\), we have
In Eq. (30), A is the area of the elliptical cross section, that is
3 Elliptical cross section which does not warp
For the non-warping elliptical cross section, we have \(C_{\omega }=0\), that is
where
is the ratio of the major and minor axes of elliptical cross section. Since Eq. (32) is a second-order algebraic equation for \(q^{2}\) and
we have there exists a positive real root of Eq. (32) for q which is
In the Appendix of this paper, we give a proof that Eq. (33) has only a one positive real root in every possible case. Here, we note that for the elastic homogeneous orthotropic cross section \(e_{15}=e_{24} = 0\) and from Eq. (35) we get Chen’s result \(q=\frac{b}{a}=\sqrt{\frac{A_{44}}{A_{55}}}\) [14].
4 Elliptical cross section with maximum torsional rigidity
Next, we consider an elliptical cross section whose area A is a given value. For this cross section
and
The aim is to determine the size of the orthotropic piezoelectric cross section whose torsional rigidity is the maximum for the given cross-sectional area A. Application of formula (30) leads to the result
Formula (39) gives the dependence of the torsional rigidity from the semi-axis a \((0< a <\infty )\), for fixed cross-sectional are A. In order to obtain
we reformulate the expressions of \(S_{M}(a)\) in the form
It is evident for prescribed A that
From Eq. (42), it follows that the function \(S=S(a)\) has at least one positive maximum in the interval \(0<a<\infty \), that is
The electrical torsional rigidity \(S_{E}\) is defined by the next equation:
By the use of [30] formula for Eqs. (7)\(_{1}\) and (9)\(_{1}\), we can write
Substitution of Eq. (28) into Eq. (45) gives
For a given cross-sectional area A, \(S_{E}\) as a function of a can be represented as
The function \(S_{E}=S_{E}(a)\) has the properties
According to Eq. (48), we have the function \(S_{E}=S_{E}(a)\) has at least one positive maximum in the interval \(0<a<\infty \), that is,
5 Prandtl’s stress function and electric displacement potential function
The expression of shearing stresses and electric displacements in terms of Prandtl’s stress function \(U=U(x,y)\) and electric displacement potential function \(F=F(x,y)\) can be represented as [7, 8, 23]
Prandtl’s stress function and electric displacement potential function satisfy the homogeneous boundary conditions
The determination of the Prandtl stress function \(U=U(x,y)\) and the electric displacement potential function \(F=F(x,y)\) is based on the system of partial differential equations given by Eqs. (53) and (54):
In the following, we deal with the non-warping elliptical cross section, that is
Equation (56) shows that for non-warping cross section the electric potential function \(\varphi =\varphi (x,y)\) does not depend on \(\alpha \).
A detailed calculation based on Eqs. (53) and (45) gives
where
It is known that [7, 8, 23] the torsional rigidity \(S_{M}\) and the electric torsional rigidity \(S_{E}\) in terms of \(U=U(x,y)\) and \(F=F(x,y)\) can be computed as
A simple calculation gives
6 Illustration of the theoretical results by numerical example
In this section, a numerical example is presented to illustrate the theoretical results of Sects. 3, 4 and 5.
The following data are used:
Application of formulae (34) and (55) gives
for the non-warping cross section

The plot of \(S_{M}(a)\) as a function of half major axis of elliptical cross section
The plot of \(S_{M}(a)\) for the prescribed cross-sectional area is shown in Fig. 3. A detailed computation gives

The graph of function \(S_{E}=S_{E}(a)\) for given cross-sectional area
The numerical results (65) and (66) support the validity of the statement that for given cross-sectional area the non-warping cross section does not have the maximum value of torsional rigidity.
The graph of function \(S_{E}=S_{E}(a)\) for given cross-sectional area is shown in Fig. 4. By a detailed computation, we can derive the next results:
Application of formula (61) gives
7 Conclusions
The Saint-Venant torsion of a solid elliptical cylinder made of orthotropic homogeneous axially poling piezoelectric material is considered. The shape of the elliptical cross section which does not warp under the action of applied torque is determined. The size of the orthotropic homogeneous piezoelectric cross section which has the maximum torsional rigidity for given cross-sectional area are also calculated.
References
Lurie, A.I.: Theory of Elasticity. Fiz-Mat-Lit. Moscow, (1970) (in Russian)
Sokolnikoff, I.S.: Mathematical Theory of Elasticity. McGraw-Hill, New York (1956)
Sadd, H.H.: Elasticity Theory: Applications and Numerics. Elsevier, London (2005)
Lekhnitskii, S.S.: Theory of Elasticity of an Anisotropic Elastic Body. Mir Publishers, Moscow (1981)
Lekhnitskii, S.S.: Torsion of Anisotropic and Non-homogeneous Beams. Nauka, Moscow (1971). (In Russian)
Timoshenko, S.P., Goodier, J.N.: Theory of Elasticity, 3rd edn. McGraw Hill, New York (1971)
Bisegna, P.: The Saint-Venant problem in the linear problem of piezoelectricity. Atty Convegni Lincei Accad. Nak. 40, 151–165 (1998)
Bisegna, P.: The Saint-Venant problem for monoclinic piezoelectric cylinder. ZAMM 78, 147–165 (1999)
Rovenski, V., Harsh, E., Abramovich, H.: St-Venant Problem for Homogeneous Piezoelectric beams. TAE Report No. 967, 1–100, (2006)
Rovenski, V., Harsh, E., Abramovich, H.: Saint-Venant‘s problem for homogeneous piezoelectric beams. J. Appl. Mech. 74(6), 1095–1103 (2007). https://doi.org/10.1115/1.2722315
Horgan, C.O.: On the torsion of functionally graded anisotropic linearly elastic bars. IMA J. Appl. Math. 72(5), 556–572 (2007). https://doi.org/10.1093/imamat/hxm027
Roney, F.J., Ferrari, M.: Torsion and flexure of inhomogeneous elements. Compos. Eng. 5, 901–911 (1995). https://doi.org/10.1016/0961-9526(95)00043-M
Chen, T., Wei, C.J.: Saint-Venant torsion of anisotropic shafts: theoretical frameworks, external bound and affine transformation. Q. J. Mech. Math. 58(2), 269–278 (2005). https://doi.org/10.1093/qjmamj/hbi013
Chen, T.: A homogeneous elliptical shaft may not warp under torsion. Acta Mech. 169, 221–224 (2004). https://doi.org/10.1007/s00707-004-0093-2
Ecsedi, I.: Elliptic cross section without warping under torsion. Mech. Res. Commun. 31, 147–150 (2004). https://doi.org/10.1016/S0093-6413(03)00098-3
Ecsedi, I.: Some analytical solutions for Saint-Venant torsion of non-homogeneous cylindrical bars. Eur. J. Mech. A/Solids 28(5), 985–990 (2009). https://doi.org/10.1016/j.euromechsol.2009.03.010
Ecsedi, I.: Some analytical solutions for Saint-Venant torsion of non-homogeneous anisotropic cylindrical bars. Mech. Res. Commun. 52, 95–100 (2013). https://doi.org/10.1016/j.mechrescom.2013.07.001
Ecsedi, I., Baksa, A.: Saint-Venant torsion of anisotropic elliptical bar. Int. J. Mech. Eng. Educ. 45(3), 286–294 (2017). https://doi.org/10.1177/0306419017708642
Ecsedi, I., Baksa, A.: Torsion of functionally graded linearly elastic cylinder. Eng. Trans. 66(4), 413–428 (2018). https://doi.org/10.24423/EngTrans.923.20181003
Ecsedi, I., Baksa, A.: Saint-Venant torsion of cylindrical orthotropic elliptical cross section. Mech. Res. Commun. 99, 42–46 (2019). https://doi.org/10.1016/j.mechrescom.2019.06.006
Horgan, C.O., Chan, A.M.: Torsion of functionally graded isotropic linear elastic bars. J. Elast. 52, 181–191 (1998). https://doi.org/10.1023/A:1007544011803
Davi, F.: Saint-Venant‘s probelm for linear piezoelectric bodies. J. Elast. 43, 227–245 (1996). https://doi.org/10.1007/BF00042502
Ecsedi, I., Baksa, A.: Prandtl‘s formulation for the Saint-Venant‘s torsion of homogeneous piezoelectric beams. Int. J. Solids Struct. 47, 3076–3083 (2010). https://doi.org/10.1016/j.ijsolstr.2010.07.007
Ecsedi, I., Baksa, A.: A variational formulation for the torsion problem of piezoelectric beams. Appl. Math. Model. 36, 1668–1677 (2012). https://doi.org/10.1016/j.apm.2011.09.021
Rovenski, V., Abramovich, H.: Saint-Venant problem for compound piezoelectric beams. J. Elast. 96(2), 105–127 (2009). https://doi.org/10.1007/s10659-009-9201-9
Nodargi, N.A., Bisegna, P.: The Saint-Venant problem for general piezoelectric cylinders with applications to smart metamaterials design. Appl. Math. Model. 93, 831–851 (2021). https://doi.org/10.1016/J.APM.2021.01.003
Hassani, A.R., Fae, R.T.: Torsion analysis of cracked circular bars actuated by piezoelectric coating. Smart Mater. Struct. 25, 14 (2016). https://doi.org/10.1088/0964-1726/25/12/125030
Talebanpour, A., Hematiyan, M.R.: Torsion analysis of piezoelectric hollow bars. Int. J. Appl. Mech. 6(2), 1450019 (2014). https://doi.org/10.1142/S1758825114500197
Ecsedi, I., Baksa, A.: Saint-Venant torsion of non-homogeneous orthotropic circular cylinder. Arch. Appl. Mech. 90, 815–827 (2020). https://doi.org/10.1007/s00419-019-01640-y
Bai, Z., Shield, R.T.: Identities for torsion of cylinders. J. Appl. Mech. 61, 499–500 (1994). https://doi.org/10.1115/1.2901483
Wang, X.: A simple proof of Descartes rules of signs. Am. Math. Monthly 11, 525–526 (2004). https://doi.org/10.2307/4145072
Open Access
This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
Funding
Open access funding provided by University of Miskolc.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: a proof that Eq. (33) has only one positive real root
Appendix: a proof that Eq. (33) has only one positive real root
We reformulate Eq. (33) as
The coefficient \(a_{2}\) may be positive or negative. At first, we investigate the case when \(a_{2}\ge 0\). Simple computation gives
In this case, the graph of the function \(q\rightarrow f(q)\) intersects the axis q at two points which are \(P_{1}(q_{0},0)\) and \(P_{2}(-q_{0},0)\) as shown in Fig. 5. It is evident that
has only one real positive root which is given by a formula (35).

The plot of f(q) as a function of q for \(a_{2}>0\)
In the second case \(a_{2}\) negative, \(a_{2}<0\). For this case, we have

The plot of f(q) as a function of q for \(a_{2}<0\)
The function \(q\rightarrow f(q)\) has a local maximum at point \(P_{0}\) and local minima at points \(P_{3}\), \(P_{4}\), and the points \(P_{1}\) and \(P_{2}\) are the inflexion points of the graph of the function \(q\rightarrow f(q)\). Figure 6 shows the graph of the function \(q\rightarrow f(q)\) for \(a_{2}<0\). In this case, it is evident that
has only one real positive root.
The statement that Eq. (33) has only one positive real root follows from Descartes’ rule of signs, see [31]. The number of positive roots of Eq. (33) is either equal to the number of sign changes of consecutive (nonzero) coefficients or is less than it by an even number.
In the first case, the sequence of signs is \((+\,+\,-)\) and in the second case the sequence of signs is \((+\,-\,-)\). In both cases, the number of sign changes is one; that is, there is exactly one positive real root of Eq. (33).
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ecsedi, I., Baksa, A. Saint-Venant torsion of orthotropic piezoelectric elliptical bar. Acta Mech 233, 201–211 (2022). https://doi.org/10.1007/s00707-021-03110-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-021-03110-5