
Abstract
Although squeezing ground may undergo rapid convergences following tunnel excavation, its behaviour is often markedly time dependent due to creep or consolidation. The effects of creep and consolidation on shield tunnelling are comparatively evaluated in two companion papers, with the aim of demonstrating their qualitative similarities and distinctive features. The present, first paper investigates the basic time effects, placing focus on the time development of ground deformations and the complex interaction between ground, tunnel boring machine (TBM) and tunnel support during excavation and during construction standstills. The presented numerical simulations indicate several qualitative similarities between the two mechanisms of time dependency, in respect of the time development of ground deformations, the counter-intuitive behaviour of increasing shield loading with increasing rate of advance under certain conditions, as well as the thoroughly adverse effect of the additional time-dependent deformations taking place during construction standstills on the shield loading. However, they also underscore two prominent differences resulting from the fundamentally different nature of creep (a purely mechanical rheological process) and consolidation (a coupled hydromechanical process): first, the consistently more extensive plastic yielding in consolidating ground, which is partially associated with the seepage forces exerted by the pore water on the solid rock constituents. Second, the role of seepage forces as a potential destabilising agent, particularly for the tunnel face, which does not happen in the case of creep and may be critical for shield and cutterhead jamming. Building upon these investigations, the companion paper compares creep and consolidation with respect to the transferability of experiences about the required thrust force to tunnels of different diameter or to adjacent tunnels.
Highlights
-
Analysis of similarities and differences between the effects of creep and consolidation on mechanised shield tunnelling through squeezing ground.
-
Similar time development of rock deformations and shield loading during advance and during standstills in creep and consolidation.
-
Similar counter-intuitive behaviour of increasing shield loading with increasing advance rate under certain conditions in creep and consolidation.
-
More extensive ground plastification in consolidation than in creep, partially due to the effect of seepage forces on the solid rock constituents.
-
Potential instability due to seepage forces may induce excessive convergences or face extrusion and render shield or cutterhead jamming critical.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Squeezing, the phenomenon of relevant rock deformations or pressures in tunnelling, may occur rapidly or develop slowly, over a period of days, weeks, or even months depending on the nature of the ground (Kovári and Staus 1996; Barla 2001; Anagnostou and Kovári 2005). The time dependency of squeezing can be caused by the rheological properties of the ground (creep), by stress redistributions associated with transient seepage flow in the case of low-permeability, saturated ground (consolidation), or both. Physicochemical processes (such as disintegration of serpentine rock, rock dissolution in karstic formations, crystal-growth in anhydritic rocks) may, too, result in time-dependent deformations, but affect tunnel construction—the subject of this paper—rather rarely (Anagnostou and Kovári 2005; Anagnostou 2007).
Creep is associated with rheological processes, which are of a purely mechanical nature and thus in general independent of the presence of pore water. Creep has been shown to be more pronounced when the ground is overstressed, particularly when approaching failure state; hence, it is especially evident under squeezing conditions (Fritz 1981; Anagnostou and Kovári 2005; Anagnostou 2007).
Consolidation is relevant in water-bearing ground of low permeability and is associated with the transient seepage flow triggered by the tunnel excavation. Seepage flow enables the progressive dissipation of the excavation-induced excess pore pressures in the vicinity of the tunnel, thus inducing variations in the effective stresses and ground deformations. These processes occur more or less rapidly depending on the ground permeability and continue until a steady state is reached. Pore pressure has been known to intensify squeezing phenomena (Kovári and Staus 1996; Steiner 1996) and its effect may be decisive in deep tunnels, e.g. the Gotthard Base railway tunnel in Switzerland (Vogelhuber 2007), and subaqueous tunnels, e.g. the Lake Mead Intake No. 3 Tunnel in the USA (Anagnostou et al. 2010, 2018; Anagnostou and Zingg 2013) or the planned Gibraltar Strait Tunnel connecting Spain and Morocco (Pliego 2005; Lombardi et al. 2009; Anagnostou 2014).
In tunnelling practice, it is not always directly distinguishable whether the source of time dependency of the ground behaviour is creep, consolidation, or the superposition of both. This is partially due to the different perception concerning the presence and influence of the pore water depending on the nature of the rock: in zones of fractured rock with increased permeability, the pore water presence can be identified directly, whereas in zones of low-permeability rock the pore water may be “invisible”, as the water ingress is very limited, often in spite of the high prevailing pore pressure gradients (Anagnostou 2016).
An early identification of the actual source of time dependency is valuable for the tunnel design, due to the fundamentally different nature of rheological processes (purely mechanical) and consolidation processes (coupled hydromechanical). It is particularly important in the context of laboratory testing during the project planning phase, in respect of selecting suitable processes and equipment for extracting, preserving, and testing the rock samples. In addition, it may be crucial for the choice of mitigation measures and the assessment of their effectiveness. For example, advance drainage is irrelevant in the case of creep, but has proven to be particularly effective in numerous tunnelling projects where consolidation processes posed a concern, e.g. the Lake Mead Intake No. 3 Tunnel in the USA (Anagnostou and Zingg 2013) and the Vereina railway tunnel in Switzerland (Steiner 1996). Advance drainage relieves the pore pressures and allows the ground to consolidate, thereby increasing its undrained shear strength and leading to reduced short-term convergences in the vicinity of the tunnel heading (Anagnostou 2009a), while it also eliminates the high pore pressure gradients during the early stages of consolidation, in turn limiting convergences in the long term (Anagnostou 2009b); furthermore, it is beneficial for the stability of both the tunnel face and grouting cylinders in fault zones (Anagnostou and Zingg 2013).
Taking the above into consideration, the question arises of what the fundamental differences in the phenomenological ground behaviour are, and whether these could help distinguish creep from consolidation in practical situations. Although several existing works have separately examined the effects of creep (inter alia Sterpi and Gioda 2009; Hasanpour et al. 2015; Swannell et al. 2016; De la Fuente et al. 2020; Leone et al. 2023) or consolidation in tunnelling (inter alia Graziani and Ribacchi 2001; Anagnostou 2007; Vogelhuber 2007; Ramoni and Anagnostou 2011a), this question has not been addressed in the literature thus far. With the aim of bridging this knowledge gap, this paper evaluates comparatively some fundamental aspects of creep and consolidation in tunnelling, based upon transient numerical simulations. Emphasis is placed on the time development of ground deformations and the problems of shield or cutterhead jamming in mechanised tunnelling. To enable an easier qualitative interpretation of the fundamental aspects discussed, consideration is given to the simplified rotationally symmetric boundary value problem of a deep, cylindrical, and uniformly supported tunnel of radius R0, crossing homogeneous and isotropic rock; the rock is subjected to a uniform and isotropic in situ stress field (σ0) and, in the case of consolidation, to a uniform and isotropic in situ pore pressure field (p0) as well, with values equal to the ones prevailing at the elevation of the tunnel axis.
The paper starts by presenting the computational assumptions adopted in the numerical simulations (Sect. 2). To gain an insight into creep and consolidation, the simple plane-strain problem of a tunnel cross section far behind the advancing face is examined first, with focus on the time development of its radial displacement (u) upon excavation in the absence of a tunnel support (Sect. 3). This problem enables a simple demonstration of a fundamental difference between the two mechanisms of time dependency, that is the consistently greater extent of ground plastification in the case of consolidation, which is partially associated with the effect of seepage forces.
Subsequently, the more complex and practically relevant problem of ground, TBM and tunnel support interaction in mechanised tunnelling is examined, with focus on the shield loading that develops during the advance of the TBM and during construction standstills (Sect. 4). It is shown that, despite the fundamentally different nature of the two mechanisms, the shield loading is ultimately governed by the same counter-acting effects of the delayed deformation development compared to the case of rapid squeezing: the ground behind the face deforms less, which is favourable for shield loading, but the ground ahead of the face experiences less plastic yielding and stress relief, which is unfavourable for shield loading; this interaction is also shown to produce a similar counter-intuitive effect of the advance rate on shield loading in both mechanisms under certain conditions. Furthermore, Sect. 4 discusses the similar adverse influence of continuing ground deformations during standstills, highlighting the uncertainties of time-independent models for jamming assessment.
Finally, Sect. 5 takes a closer look into the effect of the seepage forces, one important distinguishing feature between creep and consolidation, and investigates their role as a destabilising agent under certain conditions, which may cause excessive radial convergences of the cross section or excessive extrusion and failure of the face.
Apart from the fundamental similarities and differences examined in the present work, the companion paper by Nordas et al. (2023) investigates potential differences between creep and consolidation with respect to the practical tunnel engineering question of experience transferability. Specifically, the paper addresses the following questions: Can experiences gained from previous tunnels about the required thrust force be transferred to tunnels of different diameter or to adjacent tunnels of the same diameter? How does the tunnel diameter affect the risk of shield jamming? Does the construction of a tunnel have an impact on the shield loading in a neighbouring tunnel built later?
2 Computational Assumptions
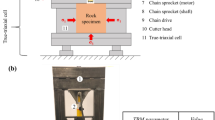
Numerical models have been formulated in Abaqus® (Dassault Systèmes 2018) for a 12 m diameter cylindrical tunnel (R0 = 6 m) to simulate the problems of a tunnel cross section under plane strain conditions and an advancing tunnel heading (Fig. 1). The model specifications are discussed hereafter and summarised in Table 1, along with the material parameters adopted in the numerical simulations.

Computational models for the plane strain problem (a) and for the axisymmetric problem (b)
2.1 Assumptions Common to Both Models
In the transient mechanical analyses considering creep, a traction equal to the in situ stress σ0 prevailing at the depth of the tunnel is prescribed at the far-field boundary of the computational domain, 400 m (ca. 67R0) away from the tunnel axis. A linear elastic-viscous perfectly plastic constitutive model is adopted for the rock, with a Mohr–Coulomb yield condition and a non-associated visco-plastic flow rule according to Perzyna’s theory (Perzyna 1966). This is suitable for modelling rheological processes in squeezing ground, where the dominant portion of time-dependent deformations is plastic. The model formulation encompasses five mechanical parameters, namely Young’s Modulus E, Poisson’s ratio v, uniaxial compressive strength fc, angle of internal friction \(\phi\), and angle of dilation ψ, as well as a single rheological parameter, the viscosity η, which determines the rate of visco-plastic deformation development due to creep. The model has been implemented in Abaqus® (Dassault Systèmes 2018) as a user-defined material (UMAT) subroutine; details on its formulation and numerical implementation can be found in Leone et al. (2023).
In the coupled hydromechanical consolidation analyses, the uniform traction σ0 is also prescribed at the far-field boundary, while a uniform pore pressure equal to the in situ value p0 prevailing at the depth of the tunnel is prescribed at a distance from the tunnel axis equal to the water table level; this has been shown to be an adequate simplification for rotationally symmetric analyses (Ramoni and Anagnostou 2011a). On account of the potential development of negative pore pressures during ground excavation under undrained conditions (see, e.g., Vogelhuber 2007; Graziani and Ribacchi 2001), a mixed hydraulic boundary condition is prescribed at the tunnel boundary, which alternates between: an atmospheric pressure (Dirichlet) condition Add paretheses - (p = 0) when seepage flow takes place from the ground to the tunnel, i.e. dq/dr > 0, where q is the flux; and a no-flow (Neuman) condition (q = 0) when seepage flow tends to take place from the tunnel to the ground in the presence of negative pore pressures, i.e. dq/dr < 0 (cf. Ramoni and Anagnostou 2011a). This ensures seepage flow only from the ground towards the opening and not vice versa. The rock is modelled as a two-phase porous medium with unit Biot’s coefficient, according to Terzaghi’s principle of effective stresses. Seepage flow is modelled based on Darcy’s law, considering a constant permeability k. An isotropic, linear elastic-perfectly plastic constitutive model with a MC yield criterion and a non-associated flow rule is adopted, with five mechanical parameters (E, v, fc, \(\phi\), ψ). The solid grains and pore water are assumed incompressible in relation to the rock, which is reasonable for weak deformable ground; under this assumption, the condition of constant water content becomes equivalent to that of constant volume during the instantaneous undrained ground response to tunnelling.
2.2 Model of Tunnel Cross Section Far Behind the Advancing Face
For a tunnel cross section far behind the face, plane strain conditions can be assumed. The plane strain model (Fig. 1a) simulates the ground response to excavation via an instantaneous unloading of the tunnel boundary from the in situ stress σ0 to zero support pressure (σR = 0). The tunnel boundary subsequently remains unsupported throughout the transient analysis and the evolution of its radial displacement over time is monitored.
Due to rotational symmetry, the problem can be analysed as 1D, considering a single strip in the r–x plane of the computational domain with fixed and impermeable edges (q = 0). The strip is discretised with a structured finite element (FE) mesh of four-noded, linear, quadrilateral, axisymmetric elements, encompassing 240 elements along the radial direction r, with exponentially variable size between 0.02R0 at the tunnel boundary and 3.7R0 at the upper far field boundary, and 1 element along the out-of-plane x-axis.
2.3 Model of Advancing Tunnel Heading
The model of the advancing tunnel heading simulates the transient processes during ongoing mechanised excavation and lining installation, as well as during a subsequent TBM standstill of arbitrary duration. Besides the trivial assumptions underlying rotational symmetry, the latter presupposes also a negligible TBM weight, and thus uniform tunnel support and overcut around the shield, as well as uniform backfilling around the segmental lining. The excavation process, which in reality consists of intervals of continuous TBM propulsion alternating with standstills for lining erection, is simulated as continuous with an average advance rate v; the consideration of an average rate for the stop-and-go advance has been shown to be a sufficiently accurate simplification in most cases (Leone et al. 2023). The step-by-step method is adopted (see, e.g., Franzius and Potts 2005), where at each numerical excavation step part of the ground is removed ahead of the face (round length s = 1 m; Fig. 1b) and an equal part of lining is installed immediately behind the shield.
The tunnel face is considered unsupported, which is reasonable considering that open shield TBMs are employed in most practical cases of mechanised tunnelling through squeezing rocks. The shield of length L is modelled with non-linear radial springs, which consider no loading (zero stiffness) for convergences below the radial overcut ΔR, and a linear elastic stiffness Ks for the portion of convergences that exceeds ΔR. The lining is modelled with elastic radial springs of stiffness Kl, assuming it is in direct contact with the ground immediately upon installation due to backfilling. The ground unloading behind the shield tail and its reloading over the lining are considered via the specification of distinct installation points for these; details can be found in Ramoni and Anagnostou (2010) and Leone et al. (2023). The left and bottom model boundaries are considered impermeable (q = 0), while the in situ pore pressure p0 is prescribed at the right model boundary, over a distance equal to the far-field radius of the seepage flow domain Rp (equal to the water table level; cf. Sect. 2.1).
The computational domain is discretised with a structured mesh of 11,532 four-noded, linear, quadrilateral, axisymmetric finite elements (FEs). The element size in the radial direction varies exponentially from 0.02R0 at the tunnel boundary to 3.7R0 and 0.18R0 at the upper and lower model boundaries, respectively. The element size along the tunnel axis is constant and equal to the round length s = 1 m. Introducing a single FE within each round length eliminates the typical saw-shaped distribution of the radial rock pressure over the shield and lining observed in step-by-step simulations (Cantieni and Anagnostou 2009). The selected round length is sufficiently small to ensure enhanced prediction accuracy (Franzius and Potts 2005). An excavation length of 10R0 (60 excavation steps) is simulated.
The model enables determining the longitudinal profile of the rock pressure σR (x) acting upon the shield at any time instance and, subsequently, its average value \(\overline{\sigma }_{R}\) via integration over the shield length L. The simulated excavation length of 10R0 is sufficiently long for \(\overline{\sigma }_{R}\) to become constant, and the standstill is initiated thereafter.
3 Time-Dependent Contraction of a Tunnel Cross Section Far Behind the Face
The radial displacement of the unsupported tunnel boundary u depends in general on all independent problem parameters, i.e. in situ stress σ0, tunnel radius R0, material constants, time t and, in the case of creep, additionally on the viscosity η:
In the case of consolidation, the permeability k, the in situ pore pressure p0, the unit weight of the pore water γw and the size (far-field radius) of the seepage flow domain Rp considered in the numerical model (Table 1) appear additionally in the parameter list:
Following dimensional analysis, Eqs. (1) and (2) can be, respectively, written as
and
Figure 2 shows the normalised radial displacement u/R0 as a function of the normalised time t*, which is defined as tE/η in the case of creep (black line) and tkE/(γwR02) in the case of consolidation (dashed and solid red lines for two values of the in situ pore pressure p0 = 1 and 4 MPa, respectively). Very low values of t* correspond to the conditions during rapid excavation, where the instantaneous ground response can be considered; the latter is purely elastic in the case of creep and undrained elastoplastic in the case of consolidation. Very high values of t* correspond to steady-state conditions, where all visco-plastic deformations have developed in the case of creep and all excavation-induced excess pore pressures have dissipated in the case of consolidation (drained conditions).

Evolution of radial displacement normalised by the tunnel radius over time in the plane strain problem (η = 1000 MPa d, k = 10–9 m/s, other parameters: Table 1)
One can readily verify that the time-development of displacements is qualitatively similar in both cases: the ground displacement increases at a decreasing rate and ultimately converges asymptotically to a maximum value at steady-state conditions. It can be directly inferred that the curves nearly overlap with appropriate scaling between the viscosity η and the permeability k, and selection of the material parameters. This demonstrates the difficulty of distinguishing creep from consolidation, as well as of back-analysing ground parameters from—or even simply interpreting—the observed time-dependent deformations.
All strength and stiffness parameters being equal, the instantaneous and steady-state displacements are consistently higher in the case of consolidation, even more so in the case of the higher pore pressure p0 = 4 MPa, due to the more extensive ground plastification (see values of the normalised plastic radius ρ/R0 in Fig. 2). The latter is observed both in the short term, where the ground response is undrained elastoplastic in the case of consolidation but purely elastic in the case of creep, and at steady state, where the ground response is elastoplastic in both cases, but in the case of consolidation there is the additional, external loading by the seepage forces. Their steady-state magnitude depends solely on the hydraulic boundary conditions and their effect is therefore higher in the case of higher pore pressure p0 = 4 MPa, causing more extensive plastification and leading to substantially increased displacements of the tunnel boundary.
As the magnitude of the seepage forces does not depend on characteristics of the ground and can be arbitrarily high depending on the in situ pore pressure p0, it may happen—depending on p0 and ground strength—that equilibrium in the vicinity of the tunnel boundary is impossible and thus excessive cavity contraction or even complete cavity closure occurs. In this sense, seepage forces constitute a potential destabilising agent for the tunnel cross section and the tunnel face. This is a distinguishing feature between creep and consolidation, which is examined in more detail in Sect. 5.
4 Shield Loading During TBM Advance and Standstills
The average rock pressure acting upon the shield \(\overline{\sigma }_{R}\) depends in general on all independent problem parameters, i.e. the in situ stress σ0, the tunnel radius R0, the material constants of the ground E, ν, fc, ϕ, ψ, the TBM parameters Ks, Kl, L, ΔR, the advance rate v, and the standstill time t. Analogously to the problem of the tunnel cross section, in the case of creep it depends additionally on the viscosity η, i.e.
and in the case of consolidation on the permeability k, the in situ pore pressure p0, the unit weight of the pore water γw, and the size of the seepage flow domain Rp:
Following dimensional analysis, and considering the inverse proportionality between Young’s modulus E and displacements in elastoplastic ground (Anagnostou and Kovári 1993; Ramoni and Anagnostou 2010), the normalised average pressure over the shield \(\overline{\sigma }_{{\text{R}}} /\sigma_{0}\) can be expressed as
in the case of creep, whereas in the case of consolidation the corresponding expression reads as follows:
4.1 Shield Loading During TBM Advance
Figure 3 shows the plastic strain contours in the vicinity of the advancing tunnel face (Fig. 3a, b), along with the longitudinal distributions of displacements (Fig. 3c, d), convergences (Fig. 3e, f), and radial stresses (Fig. 3g, h) in the case of creep (black lines) and consolidation (dashed and solid red lines for two values of the in situ pore pressure p0 = 1 and 4 MPa, respectively), for two limit cases of rapid and slow excavation (l.h.s. and r.h.s. diagrams). The latter are considered via the normalised advance rates v* = (v/R0) η/E and v* = (v/R0) γw R02/(kE) in Eqs. (7) and (8), which express how fast one tunnel radius is excavated in relation to the rate that the time-dependent deformations develop. The slow and fast excavation cases are directly analogous to those of a very high and a very low normalised time t*, respectively, in the case of the tunnel cross section problem examined in Sect. 3: during rapid excavation the ground response is purely elastic in the case of creep, and undrained elastoplastic in the case of consolidation; during slow excavation there is sufficient time for steady-state conditions to develop simultaneously with the advance of the face, where all visco-plastic deformations have taken place in the case of creep, and drained conditions prevail in the case of consolidation, following the complete dissipation of the excavation-induced excess pore pressures.

Contour-lines of plastic strain (a, b); longitudinal displacement profiles (c, d); longitudinal convergence profiles (e, f); longitudinal distributions of radial stress at r = R over shield and lining as well as ahead of the face (g, h) during fast and slow excavation (slow excavation: η = 2 10–3 MPa d, k = 10–4 m/s; fast excavation: η = 2 108 MPa d, k = 10–16 m/s; other parameters: Table 1)
Similar to the problem of the tunnel cross section examined previously, the plastic strains (Fig. 3a, b) and the displacements (Fig. 3c, d) are higher in the case of consolidation than in the case of creep, both during rapid and slow excavation. However, this is not necessarily reflected as a higher rock pressure on the shield (see stress for x > 0 in Fig. 3g, h), because the mechanisms underlying the rock–shield interaction are far more complex: the pressure that ultimately develops on the shield is determined by the interplay between two counteracting effects of rock plastification : more plastic yielding on the one hand leads to increased ground convergences around the shield, and thus increased contact area and tentatively increased shield loading, but on the other hand it causes more stress relief ahead of the face, which tentatively results in less load transfer to the shield. The differences in the rock pressure between creep and consolidation for the cases of rapid and slow excavation, which are more pronounced in the higher pore-pressure case (red solid lines in Fig. 3), can be interpreted based on this interaction. Both for fast and slow excavation, stress-relief ahead of the face is more pronounced in the consolidation case than in the creep case (compare red and black solid lines for x < 0 in Fig. 3g, h), which should tentatively result in a lower shield loading. This is indeed the case for slow excavation (compare red and black solid lines for x > 0 in Fig. 3h), but for fast excavation it appears that the unfavourable effect of a larger contact area outweighs the favourable effect of more pronounced stress relief and leads to a higher shield loading in the case of consolidation (compare red and black solid lines for x < 0 in Fig. 3g).
4.2 Counter-Intuitive Effect of Advance Rate
The interplay of the two competing effects discussed above also produces a counter-intuitive result regarding the effect of advance rate on shield loading. Figure 4 shows the average shield pressure \(\overline{\sigma }_{R}\) as a function of the normalised advance rate v* for creep (black lines) and consolidation (red lines). One would expect the conditions to become increasingly favourable with faster excavation, i.e. \(\overline{\sigma }_{R}\) to decrease monotonically with increasing v*, due to the delay in the development of plastic deformations; however, within a certain range of v*-values, \(\overline{\sigma }_{R}\) increases with v* and is higher compared to its value when deformations develop rapidly (v* → 0). This seemingly paradoxical behaviour is observed both in the case of creep and consolidation, with the two distributions being qualitatively identical.

Average rock pressure developing on the shield (normalised by the in situ stress) as a function of the normalised advance rate v* (p0 = 4 MPa; other parameters: Table 1)
Leone et al. (2023) originally reported and examined in detail this counter-intuitive behaviour in the case of creep. The authors showed that it is attributed to the delayed plastic deformation development with increasing viscosity η (or, equivalently, normalised advance rate v* in this case), which leads to smaller contact area between shield and ground, but also limits the stress relief of the ground ahead of the face, thereby having a stiffening effect. The paradox appears in the range of v* where the superimposed effect of contact area and ground stiffening is the most unfavourable.
Ramoni and Anagnostou (2011a) originally reported and examined the same paradox for the case of consolidation, explaining it on the basis of the slower development of plastic deformations in the case of lower permeability k, an effect directly analogous to that of a higher viscosity η in the case of creep. In the case of consolidation, however, there exists the additional effect of the negative pore pressures (suction) that may develop upon ground unloading under certain conditions. These have a stabilising effect, as they increase the effective stresses and thus the shearing resistance of the rock, thereby leading to reduced deformations and plastification. The paradox appears in the range of v* where the most unfavourable situation arises, with pore pressures being negative in the vicinity of the face, thus causing stiffening ahead of it, and simultaneously positive over the shield, thus resulting in larger deformations and contact.
4.3 Shield Loading During a Standstill
Within the range of v* where the paradox discussed previously appears, the conditions are also more unfavourable during a subsequent standstill, where the TBM shield remains static and the ground deforms and exerts additional pressure on it over time. This is evident from the dashed lines in Fig. 4, which show the shield loading for the limit case of a sufficiently long standstill that allows steady-state conditions to develop. The rock pressure variation is qualitatively similar for both creep and consolidation, but its increase is in general more pronounced in the latter case, since seepage flow progressively starts taking place during the standstill and seepage forces induce more extensive ground plastification. (Expectedly, this increase will be less pronounced in the case of the lower pore pressure p0 = 1 MPa, which is not shown in Fig. 4).
The above becomes clearer, when examining the development of the average rock pressure (\(\overline{\sigma }_{R}\)) during the standstill, which is shown in Fig. 5 for the case of creep (black lines) and consolidation (red lines), for the characteristic values of the normalised advance rate v* corresponding to the 6 points A1–A3 and B1–B3 annotated on Fig. 4. The rock pressure development is qualitatively similar for the two mechanisms: for a low v* (dotted lines; points A1, B1 in Fig. 4), the behaviour is almost time-independent and steady state is reached practically already during excavation, while for a high v* (dashed lines; points A3, B3 in Fig. 4) the behaviour is pronouncedly time dependent, with the rock pressure progressively increasing and ultimately reaching a maximum value after a very long time. The maximum value is similar to the one in the low v* case for creep, but higher in the case of consolidation. A qualitatively similar behaviour can be observed for the intermediate v* corresponding to the range of the paradox (solid lines; points A2, B2 in Fig. 4), where both the instantaneous and steady-state rock pressure exceed those of the time-independent model, where deformations develop rapidly, indicating that this case is the most critical from a practical engineering viewpoint.

Increase in the normalised average rock pressure developing on the shield during a standstill (p0 = 4 MPa; other parameters: Table 1)
Conclusively, it is evident that standstills are thoroughly unfavourable in both cases, and ultimately lead to a higher rock pressure for v* in the range of the paradox, compared to the one that would develop in the case of time-independent ground behaviour (v* → 0). Therefore, models that disregard time dependency of the ground behaviour and assume that plastic deformations develop instantaneously are in no way conservative: they may overestimate the shield loading during excavation, but they considerably underestimate it during ones—even during short standstills—and this occurs regardless of the mechanism underlying the time dependency of ground behaviour.
5 On the Destabilising Effect of the Seepage Forces
Permeability governs the rate of squeezing in the case of consolidation, analogously to viscosity in the case of creep. However in the case of consolidation an additional parameter has to be considered, the in situ pore pressure or its gradient, the seepage force. This does not exist in the case of creep and—as an external loading—inherently results in fundamental differences in the ground behaviour.
The detrimental effect of seepage flow can best be explained by considering the conditions at the end of the consolidation process. In homogeneous ground the steady-state pore pressure field and thus the magnitude of the seepage forces depend solely on the hydraulic boundary conditions, that is—in the present case—on the in situ pore pressure. To fulfil equilibrium, the seepage forces must be resisted by the stresses in the ground; however, the maximum resistance that the ground can provide depends on its mechanical characteristics and is limited by its strength. So, for example, in the plane of the tunnel cross section the seepage force fs acting upon an infinitesimal rock element at an unsupported excavation boundary (Fig. 6a) can be kept in equilibrium only by the tangential stresses σ't (arching), which, however, are limited by the uniaxial compressive strength fc of the ground. At an extruding tunnel face the curvature radius is negative and equilibrium is possible only via catenary action, which presupposes that the ground can sustain tensile stresses ft (Fig. 6b). Considering the above, under certain conditions the magnitude of seepage forces may be sufficiently high to make impossible the fulfilment of equilibrium in the vicinity of the tunnel, thereby causing excessive convergences of the tunnel cross section or extrusion and instability of the tunnel face.

Qualitative interpretation of the destabilising effect of seepage forces at the unsupported tunnel boundary: a development of excessive compressive tangential stress in the plane of the tunnel cross section; b development of tensile tangential stress at the tunnel face
As these effects relevant in consolidation are induced by an external agent completely unrelated to the mechanical properties of the ground, they must be distinguished from familiar instability phenomena, e.g. those that occur in rocks exhibiting strain softening that are relevant both in creep (tertiary creep; Sterpi and Gioda 2009) and consolidation; therefore, they may also occur in the absence of softening, in perfectly plastic rocks examined in the present work.
This role of seepage forces as a potential destabilising agent has been reported by Egger et al. (1982) and some basic considerations were also later examined by Anagnostou (2006). The destabilising effect of seepage force on the tunnel boundary and the tunnel face is examined separately in the following subsections, with reference to the problems of the tunnel cross section under plane strain conditions and the tunnel heading examined in the previous sections of the paper.
5.1 Tunnel Cross Section Far Behind the Face
The rotationally symmetric, plain strain problem of an unsupported tunnel cross section will be considered (Fig. 6a). Taking account of the steady-state radial pore pressure distribution, the condition of radial equilibrium at the tunnel boundary reads as follows (Anagnostou and Kovári 2003; Anagnostou 2009b):
where r is the radial coordinate, σ'r the radial effective stress, R the tunnel radius in the deformed configuration, fc the uniaxial compressive strength of the ground, and Rp the far-field radius of the seepage flow domain.
In Eq. (9), the first r.h.s. term denotes the resistance provided by the ground during yielding, whereas the second term results from the seepage flow. As the pore pressure p0 can take any value (depending only on the elevation of the water table, regardless of the strength of the ground), the r.h.s. term of Eq. (9) may become negative if the tunnel is located sufficiently deep under the water table. In this case, the effective radial stress cannot increase with the radius and therefore cannot reach a state of equilibrium with the far-field stress σ0, which according to Egger et al. (1982) means that the opening would be unstable. This points to a qualitative difference to the ground behaviour in the case of creep, where a stable stress field always exists in the absence of softening.
This difference is, however, only apparent, because the instability would manifest itself by increasing convergences, which would result in an increasing curvature of the tunnel boundary, and equilibrium can always be reached if the curvature becomes sufficiently big. The maximum radius R' that allows for equilibrium to be achieved can be determined from Eq. (9) by equating its r.h.s. term to zero, which leads to the following expression:
For the strength and the in situ pore pressures considered in Sects. 3 and 4 (fc = 2 MPa, p0 = 1–4 MPa), the maximum radius R' > > R0 = 6 m, which means that equilibrium is possible even when disregarding the favourable effect of the increasing curvature due to cavity contraction. In the sequel, a much lower strength will be considered (fc = 0.3 MPa) to illustrate quantitatively the behaviour discussed above. For this strength and the higher in situ pore pressure considered (p0 = 4 MPa), the maximum radius R' ≈ 0, which means that the equilibrium condition cannot be satisfied, if formulated in the undeformed configuration. This is true even for the lower in situ pore pressure (p0 = 1 MPa), where the maximum radius R' = 3.56 m (< R0 = 6 m).
However, considering the deformed configuration, that is performing a geometrically non-linear, large strain analysis (see, e.g., Vrakas and Anagnostou 2015), allows finding equilibrium, even if the latter is achieved at elevated convergences or almost complete closure of the opening. This is illustrated by the numerical results of Fig. 7, which shows the time-development of the tunnel radius R for the two considered values of the in situ pore pressure.

Contraction of a tunnel cross section far behind the face over time in the case of low strength (fc = 0.3 MPa; other parameters: Table 1)
In conclusion, the instability postulated by Egger et al. (1982) cannot actually occur and there is no difference between creep and consolidation in respect of equilibrium or lack thereof in the case of a circular opening. The reason is of a geometric nature: at the onset of instability the curvature increases and this stabilises the system, so that an equilibrium can always be found, even if this may happen at big convergences which, in practical terms, may fail to satisfy serviceability criteria.
However, this finding about the effect of the curvature and its change during cavity contraction points to a fundamental difference between the behaviour of the tunnel cross section and the behaviour of the tunnel face: the geometry of the cross section becomes increasingly more favourable during cavity contraction, whereas the geometry of the face becomes more and more unfavourable during extrusion, as it becomes convex (Fig. 6b). The behaviour of the tunnel face during extrusion is examined in the next section.
5.2 Tunnel Face
The seepage forces have an unfavourable effect also on the tunnel face (Egger et al. 1982), causing it to undergo excessive extrusions, as shown in Fig. 6b. However, the curvature of the extruded face has an opposite sense to that of the tunnel cross section, thus necessitating the ground to develop a catenary action with sufficiently high tensile stresses in order to resist seepage forces. As the tensile strength ft of geomaterials is very limited in general, equilibrium can only be achieved by a reversal of the curvature (see dashed line in Fig. 6b), which presupposes the detachment of the extruded part, as well as of some part of it ahead of the face. In this sense, the face extrusion due to seepage forces can be classified as an instability, contrary to the contraction of the cross section examined previously.
The extrusion of the face is numerically investigated in the sequel over the course of a sufficiently long TBM standstill to reach steady state conditions, based upon geometrically non-linear, large strain analyses with the model of the advancing tunnel heading introduced earlier in Sect. 2.3. The parameters given in Table 1 are adopted and two values of in situ pore pressure p0, 1 and 4 MPa, are considered.
As the model assumes no face support (open shield TBM), it enables examining the system behaviour during unhindered extrusion of the tunnel face. This case, however, constitutes a purely theoretical consideration, since in practice the ground establishes contact with the TBM cutterhead after a certain amount of deformation, upon which further extrusion is constrained and thus an axial pressure starts developing over the cutterhead front surface. The face–cutterhead interaction is considered in the model by introducing nonlinear springs with zero stiffness for extrusion values that do not exceed the longitudinal gap between them, and a very high stiffness for the portion of extrusion that exceeds this gap (the cutterhead is considered as practically rigid in relation to the ground). The maximum longitudinal gap that is technically feasible in practice by retraction of the cutterhead amounts to nearly 90 cm, as applied, e.g., in a double shield TBM with boring radius of 9.5 m employed in the Guadarrama tunnel (Rostami 2008). However, in most practical situations the retraction is limited to 10–20 cm, to maintain a safety reserve during the TBM operation in the case of unforeseen changes in the ground conditions in later stages of the advance, as well as to avoid the risk of fractured rock inflow behind the rear end of the cutterhead that may cause mechanical damage (Burger 2023). Taking this into consideration, a longitudinal gap of 20 cm is considered in the model.
From a practical viewpoint, the combined effect of the extrusion and instability of the tunnel face and the contraction of the tunnel cross section under seepage forces may be particularly critical in respect of the thrust force and the torque of the cutterhead required in order for the TBM to restart advance after a standstill. The model provides the displacement of the tunnel face, the average radial rock pressure \(\overline{\sigma }_{R}\) that develops over the shield length L (cf. Sect. 2.3), as well as the axial pressure σx that develops on the cutterhead front surface. Considering that the relatively small force required for boring is included in the axial force exerted by the ground upon the cutterhead, the required thrust force can be evaluated in general as:
where the first term corresponds to the frictional force exerted over the shield skin, μst being the static friction coefficient between shield and rock, and the second term corresponds to the axial force exerted on the cutterhead. The friction coefficient μst is set to a relatively low value of 0.15, considering lubrication of the shield extrados (Ramoni and Anagnostou 2011b). The required torques can be evaluated as:
where μst,c is the static friction coefficient between the protruding tools of the cutterhead and the rock. The existing literature concerning this coefficient (for a summary see Bamford and Yaghoubi 2017), indicates values between 0.1 and 0.7, with an average of the maximum values equal to ca. 0.45. The variability is attributed to the rock quality, with softer rocks being associated with higher friction coefficients in general, due to the higher penetration of the cutterhead tools. Considering the above, the simulations are performed for two values of μst,c: a relatively low value of 0.15 (equal to the shield skin friction coefficient) and the average of the maximum values reported in the literature of 0.45.
The cases of unhindered and hindered extrusion are discussed hereafter with reference to Figs. 8 and 9, considering the two values of the in situ pore pressure p0, 1 and 4 MPa. Figure 8a shows the rock pressure distribution over the shield at the beginning of the standstill (equal to the pressure acting during excavation) and at steady state. Figure 8b shows the radial distribution of the axial displacement of the face at two time instances before and at the time instance when it establishes first contact with the cutterhead. Figure 8c shows radial distributions of the axial pressure acting on the cutterhead shortly upon contact, at an intermediate time instance, and at steady state. Figure 9 shows the axial displacement at the centre of the tunnel face, the required thrust force and the required torque (considered only for hindered extrusion) as functions of the standstill duration. Shield jamming and cutterhead blocking are assessed considering relatively high values for the installed torque of 30 MNm (Ramoni and Anagnostou 2010), and for the installed thrust force of 300 MN. The latter, although higher than values usually reported in the literature, is feasible with the current developments in TBM technology, particularly considering that an installed thrust of 225 MN was materialised 15 years ago in the 10 m-diameter Pajares tunnel in Spain (Ramoni and Anagnostou 2010).

a Longitudinal distribution of the radial loading of the shield; b radial distribution of the axial displacement of the face at different time instance before first contact; c radial distribution of the axial loading of the cutterhead after first contact (fc = 0.5 MPa; parameters: Table 1)

Time-development of face extrusion (a), frictional force on the shield skin and axial force on the cutterhead front (b) and torque (c) during standstill (fc = 0.5 MPa; other parameters: Table 1)
Examining first the results for p0 = 4 MPa, in the theoretical case of unhindered extrusion the time-development of the face axial displacement (Fig. 9a) is qualitatively similar to that of the radial displacement of an unsupported cross section examined previously (Fig. 7); however, as the curvature of the extruding face has a destabilising influence, the extrusion reaches extremely high values that exceed the tunnel diameter of 12 m (even when considering geometric nonlinearity in the stress analysis). This excessive extrusion induces extensive plastification of the ground ahead of the tunnel face and contraction of the tunnel cross section and, in turn, the pressure that develops on the shield increases due to longitudinal arching of the ground above it. This increase is more pronounced closer to the face, where the extruded ground is less stiff and more plastified (Fig. 8a). The skin friction to be overcome at restart thereby increases monotonically with the standstill duration, and the required thrust force exceeds the relatively high installed value of 300 MN after ca. 33 days (Point P8 in Fig. 9b).
In the practically relevant case of hindered extrusion for p0 = 4 MPa, contact between the face and the cutterhead is established after tc = ca. 3 days and the extrusion subsequently stops (Point P2 in Fig. 9a). In the model, relevant for the assessment of the 20 cm gap closure is the axial displacement of the face that occurs solely during the standstill, that is beyond the instantaneous displacement during advance of 15 cm; this is because, in reality, the latter would have been previously excavated by the cutterhead, however the model cannot capture this as it does not simulate the cutting process in detail. The axial displacement prior to contact is highest at a point ca. 5 m above the centre of the face, and contact is established first at a point ca. 1 m below that (Fig. 8b). This intuitively appears as implausible, as one would expect first contact to occur at the centre; however, it is attributed to the pore pressure distribution, specifically the development of higher in magnitude negative excess pore pressures (suction) at the centre of the face than further above, which have a stiffening effect and limit its displacement slightly. For p0 = 1 MPa the same stiffening effect of suction is visible in the two distributions of axial displacements prior to contact; however, as the negative excess pore pressures are smaller in this case, they dissipate faster and their stiffening effect vanishes prior to contact, and the latter is thus established first at the centre (Fig. 8b). The different point of first contact for p0 of 1 and 4 MPa expectedly influences also the respective axial pressure distributions and their development over time (Fig. 8c).
The skin friction to be overcome at restart increases monotonically with the standstill duration prior to cutterhead–face contact, following the same line as in the case of unhindered extrusion, due to the continuing contraction of the cross section and the resulting increased load transfer to the shield. Upon contact, the cutterhead starts preventing further face extrusion and contraction of the core, and thus also further load transfer to the shield, hence the shield load (and consequently the skin friction at restart) remains practically constant and almost all axial loading is resisted by the cutterhead (Point P6 in Fig. 9b); this has also been demonstrated by Ramoni and Anagnostou (2011a). The cutterhead torque also increases monotonically upon contact (Fig. 9c). The total required thrust force exceeds the relatively high installed values of 300 MN after ca. 4 days, 8 times faster than in the case of unhindered extrusion (cf. Points P7 and P8 in Fig. 9b). The torque exceeds the installed value of 30 MNm practically simultaneously for the lower cutterhead friction coefficient μst,c = 0.15 and earlier for the higher μst,c = 0.45 (Points P7 in Fig. 9b and P11, P12 in Fig. 9c, respectively).
As seepage forces are higher for p0 = 4 MPa than for p0 = 1 MPa, in the latter case the extrusion is less pronounced and develops slower (Fig. 9a), hence its effects in respect of the rock pressure developing on the shield (Fig. 8a) and cutterhead (Fig. 8c)—and, in turn, the required thrust force (Fig. 9b) and torque (Fig. 9c)—are less pronounced in comparison. For unhindered extrusion the installed thrust force is exceeded after ca. 111 days (cf. Point P5 in Fig. 9b). For hindered extrusion it is exceeded after ca. 11 days, 10 times faster (cf. Points P4 and P5 in Fig. 9b), while the installed torque is exceeded after ca. 20 days for the lower cutterhead friction coefficient μst,c = 0.15 and much earlier, after about 8 days for the higher μst,c = 0.45 (Points P9, P10 in Fig. 9c).
The results indicate that cutterhead blocking is overall more critical than insufficient thrust. The only exception is the case of the lower cutterhead friction coefficient μst,c = 0.15 and p0 = 1 MPa; however, such a low friction coefficient is rather unlikely in practice for weak rocks prone to squeezing.
Conclusively, these results underscore the practical significance of the seepage forces, which may result in significant loading of the cutterhead and have severe implications in respect of the design of the TBM, or even the feasibility assessment of a TBM drive in consolidating ground, an effect which does not exist in the case of creep.
6 Conclusions
This constitutes the first among two companion papers investigating similarities and differences between the time-dependent effects of creep and consolidation in mechanised shield tunnelling through squeezing ground. The present paper examined the more fundamental aspects, focusing on the mechanisms underlying the evolution of rock deformations and the complex interaction between rock, TBM and tunnel support during excavation and during construction standstills.
The presented investigations highlighted several qualitative similarities between the two mechanisms of time dependency of the ground behaviour, in respect of: (i) the time-development of the unsupported tunnel boundary displacement between tunnel excavation and steady-state conditions; (ii) the dependency of shield loading during excavation on the advance rate of the TBM, which also indicates a similar counter-intuitive behaviour of increasing shield loading with faster advance under certain conditions (Ramoni and Anagnostou 2011a; Leone et al. 2023); and (iii) the increase in the rock pressure on the static shield during construction standstills, due to the manifestation of additional ground deformations over time.
Despite these qualitative similarities, the present work underscored two prominent differences resulting from the fundamentally different nature of the purely mechanical rheological creep processes and the coupled hydromechanical consolidation processes.
The first difference is the consistently more pronounced plastification in consolidating compared to creeping ground. In the short term, this is due to the ground partially yielding immediately upon excavation under undrained conditions, but remaining practically elastic in the case of creep, where all plastic deformations are time dependent and manifest themselves later over time; in the long term, it is due to the additional, external effect of the seepage forces on the solid rock constituents under drained conditions. The paper demonstrated that, despite the more extensive ground plastification in the case of consolidation leading to higher deformations, this is not necessarily reflected as a higher rock pressure on the shield. Although higher deformations behind the advancing tunnel face are indeed unfavourable and increase the ground-shield contact area and thus the shield loading, the greater plastification ahead of the face induces more ground relaxation and stress relief, and has an opposing, favourable influence on the shield loading. Therefore, depending on the advance rate, the interaction of these effects may lead to a higher or lower shield pressure in consolidating than in creeping ground during TBM advance, as well as to a more or less pronounced increase of this pressure during a subsequent standstill of certain duration.
The second difference can be traced to the seepage forces exerted by the pore water on the solid rock constituents in the case of consolidation. As the magnitude of these forces is completely unrelated to the mechanical ground characteristics and depends only on the hydraulic boundary conditions, while the resistance provided by the ground is limited by its strength, equilibrium may be impossible in the vicinity of the tunnel for a sufficiently high pore pressure. This results in excessive convergences of the tunnel cross section or extrusion of the tunnel face, which, however, are fundamentally different: in the former case the cavity contraction increases its curvature and stabilises the system, hence equilibrium is always found, even at very high convergences, whereas in the latter case the convex curvature of the extruded face destabilises the system and equilibrium can never be found. The paper demonstrated that these phenomena, which are relevant also in the case of perfectly plastic rocks considered, are particularly critical in respect of shield jamming and cutterhead blocking in consolidating ground and must be duly considered in the design of the TBM and the feasibility assessment of the TBM drive.
Returning to the question posed in the introduction, despite the existence of the above fundamental differences, these do not allow for a distinction of creep from consolidation based upon the observed or observable ground behaviour in practice. Even if the more extensive plastification could be observed, it would not enable definitive conclusions to be drawn, as there is no reference value or systematic way of quantifying this, particularly when there is significant uncertainty surrounding the strength and stiffness parameters of the ground. Concerning the instability, there is no way of distinguishing this based on the observed behaviour, whether this is due to seepage forces, other reasons, e.g. softening, which is also relevant in creeping ground (tertiary creep; Sterpi and Gioda 2009), or a combination of these aspects. In this sense, the only viable way of distinction is the advance exploration of the hydrogeological conditions of the project site and appropriate laboratory tests to determine the rheological properties as well as the degree of saturation and permeability of the ground.
Data availability
Not applicable.
Abbreviations
- d l :
-
Thickness of the lining
- d s :
-
Thickness of the shield
- E :
-
Young’s modulus of the ground
- E c :
-
Young’s modulus of concrete
- E s :
-
Young’s modulus of steel
- F i :
-
Installed thrust force
- F r :
-
Thrust force required to overcome shield skin friction
- f s :
-
seepage force
- f t :
-
tensile strength of the ground
- f c :
-
Uniaxial compressive strength of the ground
- f c * :
-
Uniaxial compressive strength of the ground taking into account the effect of the seepage force
- H :
-
Depth of cover
- H w :
-
Water table level above tunnel axis
- K l :
-
Stiffness of the lining
- K s :
-
Stiffness of the shield
- k :
-
Permeability of the ground
- L :
-
Length of the shield
- n :
-
Normal vector to the tunnel boundary
- p :
-
Pore pressure
- p 0 :
-
In situ pore pressure
- q :
-
Flux
- R :
-
Tunnel radius in the deformed configuration
- R 0 :
-
Tunnel radius in the undeformed configuration
- R':
-
Maximum tunnel radius for achieving equilibrium
- R p :
-
Size of the seepage flow domain
- R σ :
-
Size of the computational domain
- r :
-
Radial coordinate (distance from the tunnel axis)
- s :
-
Round length
- T :
-
Torque required to restart cutterhead rotation
- T i :
-
installed torque
- t c :
-
Time instance at which contact between ground and cutterhead is established
- t F :
-
Time instance at which installed thrust force is exceeded
- t T :
-
Time instance at which installed torque is exceeded
- t :
-
Time
- t * :
-
Normalised time
- u :
-
Radial displacement
- u e :
-
Axial displacement at the centre of the face
- v:
-
Advance rate
- v* :
-
Normalised advance rate
- x :
-
Axial coordinate (distance behind the tunnel face)
- γ w :
-
Unit weight of the pore water
- ΔR :
-
Annular gap (overcut)
- δ u :
-
Additional displacement occurring during standstill
- Δx :
-
Longitudinal gap between cutterhead and tunnel face
- ε p :
-
Equivalent plastic strain
- η :
-
Viscosity of the ground
- μ st :
-
Static shield skin friction coefficient
- μ st ,c :
-
Static friction coefficient between cutterhead and ground
- v :
-
Poisson’s ratio of the ground
- ρ :
-
Radius of the plastic zone
- σ R :
-
Radial ground pressure at the tunnel boundary
- \(\sigma^{\prime}_{r}\) :
-
effective radial stress
- \(\sigma^{\prime}_{t}\) :
-
effective tangential stress
- \(\overline{\sigma }_{R}\) :
-
Average radial ground pressure over the shield
- σ r :
-
Radial stress
- σ x :
-
Longitudinal ground pressure on the cutter head
- σ 0 :
-
In situ vertical stress
- ϕ :
-
Angle of internal friction of the ground
- ψ :
-
Dilatancy angle of the ground
References
Anagnostou G (2006) Tunnel stability and deformations in water-bearing ground. Paper presented at the Eurock 2006: ISRM symposium of multiphysics coupling and long term behaviour in rock mechanics, Liège, Belgium, May 9–12, 2006. https://doi.org/10.3929/ethz-a-010819313
Anagnostou G (2007) Practical consequences of the time-dependency of ground behavior for tunneling. In: Proceedings—rapid excavation and tunneling conference, pp 255–265
Anagnostou G (2009a) The effect of advance-drainage on the short-term behaviour of squeezing rocks in tunneling. In Proceedings of the first international symposium on computational geomechanics. International Center of Computational Engineering, pp 668–679
Anagnostou G (2009b) Pore pressure effects in tunneling through squeezing ground. In: Proceedings of the second international conference on computational methods in tunnelling. Ruhr University Bochum, September 9–11, 2009. Aedificatio Publ., pp 361–368
Anagnostou G (2014) Some critical aspects of subaqueous tunnelling. Muir Wood Lecture WTC 2014, Iguassu
Anagnostou G (2016) Role played by ETH chair of underground construction in the Gotthard base tunnel. In: Ehrbar et al. (eds), Tunnelling the Gotthard, Gütersloh, pp 684–689
Anagnostou G, Kovári K (1993) Significant parameters in elastoplastic analysis of underground openings. J Geotechn Eng 119(3):401–419. https://doi.org/10.1061/(ASCE)0733-9410(1993)119:3(401)
Anagnostou G, Kovári K (2003) The stability of tunnels in grouted fault zones, vol 220. ETH, IGT, Switzerland
Anagnostou G, Kovári K (2005) Tunnelling through geological fault zones. In: International symposium on design, construction and operation of long tunnels, Taipei, vol 1. Chinese Taipei Tunnelling Association, Taipei, pp 509–520
Anagnostou G, Zingg S (2013) On the stabilizing effect of advance drainage in tunnelling. Geomech Tunn 6(4):338–354
Anagnostou G, Cantieni L, Nicola A, Ramoni M (2010) Lake mead no 3 intake tunnel—geotechnical aspects of TBM operation. Tunnelling: sustainable infrastructure, North American tunnelling conference, Portland. SME Inc., Littleton, pp 125–135
Anagnostou G, Schuerch R, Perazzelli P (2018) Lake mead intake no 3 tunnel—design considerations and construction experiences. Geomech Tunn 11:15–23. https://doi.org/10.1002/geot.201700067
Bamford W, Yaghoubi E (2017) Cutter/rock interface friction: worth measuring accurately? In: Barton ACT (eds) 16th Australasian tunnelling conference 2017—challenging underground space: bigger, better, more. Engineers Australia. https://doi.org/10.3316/informit.380552563012939
Barla G (2001) Tunnelling under squeezing rock conditions. Eurosummer-school in tunnel mechanics, Innsbruck. Logos Verlag, Berlin, pp 169–268
Burger W (2023) Personal communication
Cantieni L, Anagnostou G (2009) The effect of the stress path on squeezing behaviour in tunnelling. Rock Mech Rock Eng 42:289–318. https://doi.org/10.1007/s00603-008-0018-9
Dassault Systèmes (2018) ABAQUS 2018 Theory manual. Dassault Systèmes Simulia Corp., Providence, Rhode Island
De la Fuente M, Sulem J, Taherzadeh R, Subrin D (2020) Tunneling in squeezing ground: effect of the excavation method. Rock Mech Rock Eng 53(2):601–623. https://doi.org/10.1007/s00603-019-01931-4
Egger P, Ohnuki T, Kanoh Y (1982). Bau des Nakayama-tunnels Kampf gegen Bergwasser und vulkanisches Lockergestein. In: Engineering geology and geomechanics as fundamentals of rock engineering: contributions to the 30th geomechanical colloquium of the Austrian Society for Geomechanics, Salzburg 7–9, Oktober 1981. Springer, Vienna, pp 275–293
Franzius JN, Potts DM (2005) Influence of mesh geometry on three-dimensional finite-element analysis of tunnel excavation. Int J Geomech 5(3):256–266. https://doi.org/10.1061/(ASCE)1532-3641(2005)5:3(256)
Fritz P (1981) Numerische Erfassung rheologischer Probleme in der Felsmechanik, Mitteilung Nr. 47, Inst. Für Strassen- Eisenbahn- und Felsbau an der ETH Zürich (in German)
Graziani A, Ribacchi R (2001) Short- and long-term load conditions for tunnels in low permeability ground in the framework of the convergence–confinement method. In: Adachi et al (eds), Modern tunneling science and technology, vol 1. Swets and Zeitlinger, Lisse, pp 83–88
Hasanpour R, Rostami J, Barla G (2015) Impact of advance rate on entrapment risk of a double-shielded TBM in squeezing ground. Rock Mech Rock Eng 48(3):1115–1130. https://doi.org/10.1007/s00603-014-0645-2
Kovári K, Staus J (1996) Basic considerations on tunnelling in squeezing ground. Rock Mech Rock Eng 29(4):203–210
Leone T, Nordas AN, Anagnostou G (2023) Effects of creep on shield tunnelling through squeezing ground. Rock Mech Rock Eng. https://doi.org/10.1007/s00603-023-03505-x
Lombardi G, Neuenschwander M, Panciera A (2009) Gibraltar tunnel project update—the geomechanical challenges. Geomech Tunn 2(5):578–590
Nordas A, Leone T, Anagnostou G (2023) Creep versus consolidation in tunnelling through squeezing ground—part B: transferability of experience. Rock Mech Rock Eng (under review)
Perzyna P (1966) Fundamental problems in viscoplasticity. In: Chernyi GG, Dryden HL, Germain P, Howarth L, Olszak W, Prager W, Probstein RF, Ziegler H (eds) Advances in applied mechanics, vol 9. Elsevier, Amsterdam, pp 243–377
Pliego JM (2005) Open session—the Gibraltar Strait Tunnel. An overview of the study process. Tunn Undergr Space Technol 20(6):558–569
Ramoni M, Anagnostou G (2010) Thrust force requirements for TBMs in squeezing ground. Tunn Undergr Space Technol 25(4):433–455. https://doi.org/10.1016/j.tust.2010.02.008
Ramoni M, Anagnostou G (2011a) The effect of consolidation on TBM shield loading in water-bearing squeezing ground. Rock Mech Rock Eng 44(1):63–83. https://doi.org/10.1007/s00603-010-0107-4
Ramoni M, Anagnostou G (2011b) Design aids for the planning of TBM drives in squeezing ground. Research project FGU 2007/005 of the Swiss Federal Roads Office (FEDRO), Report 1341. Zürich
Rostami J (2008) Hard rock TBM cutterhead modeling for design and performance prediction. Geomech Tunn 1(1):18–28. https://doi.org/10.1002/geot.200800002
Steiner W (1996) Tunnelling in squeezing rocks: case histories. Rock Mech Rock Eng 29(4):211–246
Sterpi D, Gioda G (2009) Visco-plastic behaviour around advancing tunnels in squeezing rock. Rock Mech Rock Eng 42(2):319–339. https://doi.org/10.1007/s00603-007-0137-8
Swannell N, Palmer M, Barla G, Barla M (2016) Geotechnical risk management approach for TBM tunnelling in squeezing ground conditions. Tunn Undergr Space Technol 57:201–210. https://doi.org/10.1016/j.tust.2016.01.013
Vogelhuber M (2007) Der Einfluss des Porenwasserdrucks auf das mechanische Verhalten kakiritisierter Gesteine. Ph.D. thesis, ETH, Switzerland. https://doi.org/10.3929/ethz-a-005399238
Vrakas A, Anagnostou G (2015) A simple equation for obtaining finite strain solutions from small strain analyses of tunnels with very large convergences. Géotechnique 65(11):936–944. https://doi.org/10.1680/jgeot.15.P.036
Funding
Open access funding provided by Swiss Federal Institute of Technology Zurich. Open access funding provided by Swiss Federal Institute of Technology Zurich.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Leone, T., Nordas, A.N. & Anagnostou, G. Creep Versus Consolidation in Tunnelling Through Squeezing Ground—Part A: Basic Time Effects. Rock Mech Rock Eng (2024). https://doi.org/10.1007/s00603-023-03720-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00603-023-03720-6