
Abstract
Nonrigid or deformable 3D objects are common in many application domains. Retrieval of such objects in large databases based on shape similarity is still a challenging problem. In this paper, we take advantages of functional operators as characterizations of shape deformation, and further propose a framework to design novel shape signatures for encoding nonrigid geometries. Our approach constructs a context-aware integral kernel operator on a manifold, then applies modal analysis to map this operator into a low-frequency functional representation, called fast functional transform, and finally computes its spectrum as the shape signature. In a nutshell, our method is fast, isometry-invariant, discriminative, smooth and numerically stable with respect to multiple types of perturbations. Experimental results demonstrate that our new shape signature for nonrigid objects can outperform all methods participating in the nonrigid track of the SHREC’11 contest. It is also the second best performing method in the real human model track of SHREC’14.






Similar content being viewed by others

Notes
See Appendix 6 for the definition of perturbed kernel.
Geodesic distance is computed using the fast marching Matlab toolbox, http://www.mathworks.com/matlabcentral/fileexchange/6110.
This code can be downloaded at https://mirc.uzleuven.be/MedicalImageComputing/downloads/meshSIFT.php.
This dataset can be downloaded at https://code.google.com/p/tri-mesh-toolkit/.
A hybrid track combining SD-GDM and meshSIFT in SHREC’11 did achieve a better performance, but it falls out of scope in our state-of-art evaluation.
This dataset can be downloaded at http://visionlab.uta.edu/shape_data.htm.
References
Aflalo, Y., Kimmel, R.: Spectral multidimensional scaling. Proc. Natl. Acad. Sci. 110(45), 18052–18057 (2013)
Agathos, A., Pratikakis, I., Papadakis, P., Perantonis, S., Azariadis, P., Sapidis, N.S.: 3D articulated object retrieval using a graph-based representation. Vis Comput. 26(10), 1301–1319 (2010)
Alfakih, A.Y.: On the eigenvalues of Euclidean distance matrices. Comput. Appl. Math. 27(3), 237–250 (2008)
Arnoldi, W.E.: The principle of minimized iterations in the solution of the matrix eigenvalue problem. Q. Appl. Math 9(1), 17–29 (1951)
Attene, M., Falcidieno, B.: Remesh: an interactive environment to edit and repair triangle meshes. In: IEEE International Conference on Shape Modeling and Applications, 2006. SMI 2006, pp. 41–41. IEEE (2006)
Aubin, T.: Some Nonlinear Problems in Riemannian Geometry. Springer, Berlin (1998)
Bogomolny, E., Bohigas, O., Schmit, C.: Spectral properties of distance matrices. J. Phys. A: Math. Gen 36(12), 3595 (2003)
Bronstein, A.M., Bronstein, M.M., Guibas, L.J., Ovsjanikov, M.: ShapeGoogle: geometric words and expressions for invariant shape retrieval. ACM Trans. Graph. (TOG) 30(1), 1 (2011)
Bronstein, M.M., Bronstein, A.M.: Shape recognition with spectral distances. IEEE Trans. Pattern Anal. Mach. Intell. 33(5), 1065–1071 (2011)
Buser, P., Conway, J., Doyle, P., Semmler, K.D.: Some planar isospectral domains. Int. Math. Res. Not. 1994(9), 391 (1994)
Castro, M., Menegatto, V.: Eigenvalue decay of positive integral operators on the sphere. Math. Comput. 81(280), 2303–2317 (2012)
Cignoni, P., Corsini, M., Ranzuglia, G.: Meshlab: an open-source 3D mesh processing system. ERCIM News 73, 45–46 (2008)
Elad, A., Kimmel, R.: Bending invariant representations for surfaces. In: Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2001. CVPR 2001, vol. 1, pp. I–168. IEEE (2001)
Friedrichs, K.O.: Perturbation of Spectra in Hilbert Space, vol. 3. American Mathematical Society, Providence (1965)
Giachetti, A., Lovato, C.: Radial symmetry detection and shape characterization with the multiscale area projection transform. Comput. Graph. Forum 31(5), 1669–1678 (2012)
Gordon, C., Webb, D., Wolpert, S.: Isospectral plane domains and surfaces via Riemannian orbifolds. Invent. Math. 110(1), 1–22 (1992)
Hu, J., Hua, J.: Salient spectral geometric features for shape matching and retrieval. Vis Comput 25(5–7), 667–675 (2009)
Kato, T.: Perturbation Theory for Linear Operators, vol. 132. Springer, Berlin (1995)
Kurtek, S., Srivastava, A., Klassen, E., Laga, H.: Landmark-guided elastic shape analysis of spherically-parameterized surfaces. Comput. Graph. Forum 32(2pt4), 429–438 (2013)
Laga, H., Mortara, M., Spagnuolo, M.: Geometry and context for semantic correspondences and functionality recognition in man-made 3D shapes. ACM Trans. Graph. (TOG) 32(5), 150 (2013)
Lavoué, G.: Combination of bag-of-words descriptors for robust partial shape retrieval. Vis. Comput. 28(9), 931–942 (2012)
Li, C., Hamza, A.B.: Intrinsic spatial pyramid matching for deformable 3D shape retrieval. Int. J. Multimed. Inf. Retr. 2(4), 261–271 (2013)
Li, C., Hamza, A.B.: A multiresolution descriptor for deformable 3D shape retrieval. Vis. Comput. 29(6–8), 513–524 (2013)
Lian, Z., Godil, A., Bustos, B., Daoudi, M., Hermans, J., Kawamura, S., Kurita, Y., Lavoue, G., van Nguyen, H., Ohbuchi, R., Ohkita, Y., Ohishi, Y., Porikli, F., Reuter, M., Sipiran, I., Smeets, D., Suetens, P., Tabia, H., Vandermeulen, D.: A comparison of methods for non-rigid 3D shape retrieval. Pattern Recognit. 46(1), 449–461 (2013)
Lidskii, V.B.: Perturbation theory of non-conjugate operators. USSR Comput. Math. Math. Phys. 6(1), 73–85 (1966)
Lipman, Y., Rustamov, R.M., Funkhouser, T.A.: Biharmonic distance. In: ACM Transactions on Graphics, ACM 0730–0301//10-ART (2007)
Litman, R., Bronstein, A., Bronstein, M., Castellani, U.: Supervised learning of bag-of-features shape descriptors using sparse coding. Comput. Graph. Forum 33(5), 127–136 (2014)
Lowe, D.G.: Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 60(2), 91–110 (2004)
Maes, C., Fabry, T., Keustermans, J., Smeets, D., Suetens, P., Vandermeulen, D.: Feature detection on 3D face surfaces for pose normalisation and recognition. In: 2010 Fourth IEEE International Conference on Biometrics: Theory Applications and Systems (BTAS), pp. 1–6. IEEE (2010)
Ovsjanikov, M., Ben-Chen, M., Solomon, J., Butscher, A., Guibas, L.: Functional maps: a flexible representation of maps between shapes. ACM Trans. Graph. (TOG) 31(4), 30 (2012)
Pickup, D., Sun, X., Rosin, P.L., Martin, R.R., Cheng, Z., Lian, Z., Aono, M., Hamza, A.B., Bronstein, A., Bronstein, M., et al.: Shrec’14 track: shape retrieval of non-rigid 3D human models. Proc. 3DOR 4(7), 8 (2014)
Quarteroni, A., Sacco, R., Saleri, F.: Numerical Mathematics, vol. 37. Springer, Berlin (2007)
Raviv, Dan, Kimmel, Ron: Affine invariant geometry for non-rigid shapes. Int. J. Comput. Vis. 111(1), 1–11 (2015)
Reade, J.B.: Eigenvalues of positive definite kernels. SIAM J. Math. Anal. 14(1), 152–157 (1983)
Reuter, M., Wolter, F.-E., Peinecke, N.: Laplace–Beltrami spectra as ’shape-DNA’ of surfaces and solids. Comput.-Aided Des. 38(4), 342–366 (2006)
Rustamov, R.M.: Laplace–Beltrami eigenfunctions for deformation invariant shape representation. In: Proceedings of the Fifth Eurographics Symposium on Geometry Processing, pp. 225–233. Eurographics Association (2007)
Shilane, P., Min, P., Kazhdan, M.M., Funkhouser, T.A.: The princeton shape benchmark. In: Shape Modeling International, pp. 167–178. IEEE Computer Society (2004)
Smeets, D., Fabry, T., Hermans, J., Vandermeulen, D., Suetens, P.: Isometric deformation modelling for object recognition. In: CAIP 2009, LNCS 5702, pp. 757–765 (2009)
Stewart, G.W.: A Krylov–Schur algorithm for large eigenproblems. SIAM J. Matrix Anal. Appl. 23(3), 601–614 (2001)
Sun, J., Ovsjanikov, M., Guibas, L.J.: A concise and provably informative multi-scale signature based on heat diffusion. Comput. Graph. Forum 28(5), 1383–1392 (2009)
Sunada, T.: Riemannian coverings and isospectral manifolds. Ann. Math. 121(1), 169–186 (1985)
Tabia, H., Daoudi, M., Vandeborre, J.-P., Colot, O.: A new 3D-matching method of nonrigid and partially similar models using curve analysis. IEEE Trans. Pattern Anal. Mach. Intell. 33(4), 852–858 (2011)
Tabia, H., Laga, H., Picard, D., Gosselin, P.-H.: Covariance descriptors for 3D shape matching and retrieval. In: 2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 4185–4192. IEEE (2014)
Thakoor, N., Gao, J., Jung, S.: Hidden Markov model-based weighted likelihood discriminant for 2-D shape classification. Image Process. IEEE Trans. 16(11), 2707–2719 (2007)
Weyl, H.: Uber die asymptotische verteilung der eigenwerte. Nachrichten der Königlichen Gesellschaft der Wissenschaften zu Göttingen. Mathematisch-Naturwissenschaftliche Klasse, pp. 110–117 (1911)
Ye, J., Yan, Z., Yu, Y.: Fast nonrigid 3D retrieval using modal space transform. In: International Conference on Multimedia Retrieval, pp. 121–126 (2013)
Ying, X., Wang, X., He, Y.: Saddle vertex graph (svg): a novel solution to the discrete geodesic problem. ACM Trans. Graph. 32(6), 1–170 (2013)
Zaharescu, A., Boyer, E., Varanasi, K., Horaud, R.: Surface feature detection and description with applications to mesh matching. In: IEEE Conference on Computer Vision and Pattern Recognition, 2009. CVPR 2009, pp. 373–380. IEEE (2009)
Zahn, C.T., Roskies, R.Z.: Fourier descriptors for plane closed curves. Comput. IEEE Trans. 100(3), 269–281 (1972)
Zienkiewicz, O.C., Taylor, R.L., Zhu, J.Z.: The Finite Element Method—its Basis and Fundamentals, vol. 1. Elsevier Butterworth-Heinemann, Amsterdam, London (2005)
Acknowledgments
The authors would like to thank Maks Ovsjanikov and Dirk Smeets for sharing their software implementations.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: Error bounds under deformation
In this section, we investigate error bounds of the spectral signature of integral kernel operators in the presence of “smooth” manifold deformations using perturbation theory [14, 18]. The general result, intuitively speaking, is that the total deviation of a spectral signature with an arbitrary number of dimensions is finitely bounded under smooth deformations. Given a general matrix \(A\) and a perturbation parameter \(\epsilon \) within a neighborhood of zero, the perturbed matrix is written as \(A+\epsilon B\), where \(B\) is an arbitrary matrix. In this situation, each eigenvalue or eigenvectors of \(A+\epsilon B\) admits an expansion in fractional powers of \(\epsilon \), and the zeroth order term of this expansion is an eigenvalue or eigenvector of the unperturbed matrix \(A\) (Lidskii theorem, 1965 [25]). This is a well-known result in regular perturbation theory. In particular, one can actually derive a Lipschitz condition number for this continuity:
Theorem 6.1
(A special case of Lidskii theorem [18]) Assuming \(\mu (\epsilon )\) is an eigenvalue of the perturbed matrix \(A+\epsilon B\) for a sufficiently small \(\epsilon \), it admits a first-order expansion
where \(\Phi \) is the eigenvector of \(A\) corresponding to eigenvalue \(\mu \), \(A\) and \(B\) are conjugated matrices, \(\left\| \cdot \right\| _{\max }\) represents the largest singular value. The first-order coefficient \(\left\| \Phi ^T B\Phi \right\| _{\max }\) is called the Lipschitz condition number.
For the rest of this section, \(A\) is called characterization, and \(B\) is called perturbation. The Lipschitz condition number characterizes the total amount of deviation in a signature with respect to a certain amount of perturbation. In the ideal case of isometric perturbation, where \(A\) is isometric and \(B\) is zero, the Lipschitz condition number is degenerated. Let \(M\) and \(M'\) be two compact manifold domains, and \(H\) and \(H'\) be the spaces of bounded and continuous linear functionals defined on \(M\) and \(M'\). In the current context, we consider \(M'\) as a “gently” deformed version of \(M\). We assume that implicitly there exists a matching (or registration) between these two domains such that it induces a mapping between \(H\) and \(H'\), which is a closed and densely defined operator \(\mathcal D\) from \(H\) to \(H'\). The characterization of this mapping is a self-adjoint operator \(\mathcal O\). Suppose \(\mathcal O'(\epsilon )\) has a first-order approximate perturbed (infinitely dimensional) matrix representation \(A + \epsilon B\) with respect to an underlying domain deformation \(\mathcal D_{\epsilon }\).
Definition 6.1
(Perturbated \((\alpha ,p)\) -smoothness) Consider a perturbated matrix \(A + \epsilon B\) with a spectral family \(\{\mu _i(\epsilon )\}\) admitting first-order expansions: \(\mu _i(\epsilon ) = \mu _i + \left| \phi _i^T B\phi _i \right| \epsilon + o(\epsilon )\). \(A + \epsilon B\) is perturbated \((\alpha ,p)\)-smooth if
for some \(\alpha \ge 0\) and \(p> 0\), where \(\left\| \cdot \right\| _1\) is Schatten p-norms.
Perturbed smoothness actually admits a substantially larger class of deformations of practical interest. It allows the characterization to be varied with respect to the domain deformation, but it bounds the amount of deviation.
Theorem 6.2
(Error bound of spectral signature) Consider a discrepancy function for a pair of original and perturbed spectra
and two Hilbert spaces \(H\) and \(H'\) admitting a perturbation path \(\mathcal D_{\epsilon }\) for \(\epsilon \in [0,1]\). If the perturbation path is uniformly perturbed \((\alpha , p)\)-smooth with a bound \(C(\alpha ,p)\) with respect to a characterization operator \(\mathcal O(\epsilon )\), and order preserving, aka \(\mu _i\ge \mu _j\iff \mu _i'\ge \mu _j'\) for any \(i,j\), we have
where \(\kappa = \max \limits _{i}\{\left| \frac{\mu _i}{\mu _{i+1}} \right| ,\left| \frac{\mu _{i+1}}{\mu _i} \right| \}\).
Proof
(Sketch) Take the integral w.r.t \(\epsilon \): \(\mu _i'-\mu _i=\int _0^1 \mathrm {d}\mu _i(\epsilon ) \) and use the condition of perturbated \((\alpha ,p)\)-smoothness (Definition 6.1). \(\square \)
Integral kernel operator Experimental evidences suggest that distance maps/matrices, more generally, integral operators, could be a useful source for shape descriptor construction, and are potentially better than differential operators (e.g., LBO). As a rigorous treatment justifying the capability of integral kernel operators, we establish another definition for the smoothness of perturbations:
Definition 6.2
(\(\alpha \) -Hölder class of perturbed kernel) Consider integral kernel operator \(k_{\epsilon }(\cdot ,\cdot )\) with perturbation parameter \(\epsilon \), and define the perturbed kernel
where \((\tilde{x},\tilde{y})\in M'(\epsilon )\) is the perturbed version of \((x,y)\in M\). Let \(d_M\) be the geodesic distance on \(M\). If there exists \(C>0\) such that
and
\(\forall x\in M\) and any \(\epsilon >0\) in a sufficiently small neighborhood of zero.
Remark
If \(k(\cdot ,\cdot ) = d_M(\cdot ,\cdot )\), the infimum of bound \(C_{\alpha }\) that makes \(k_{\epsilon }\)’s perturbed kernel belong to \(\alpha \)-Hölder class, aka
is a “natural” quantity indicator of deformations.
In the sequel, we connect \(\alpha \)-Hölder class of perturbed kernel with perturbed smoothness.
Theorem 6.3
(Main result) Given an integral kernel operator \(\mathcal K\) as described in Sect. 2.2, we assume the distance map is in accordance with the geodesics of power \(q\), aka, there exist positive constants \(C_1\), \(C_2\) and some \(\delta \ge 0\) such that
for some integer \(q\ge 1\).
If its perturbed kernels with respect to a class of deformations, i.e., \(\gamma _{\epsilon }(\cdot ,\cdot ; k)\), are of \(\varepsilon \)-Hölder class (Definition 6.2) for some \(1\ge \varepsilon > 0\), \(\mathcal K\) or the transformed operator \(\widetilde{\mathcal K} = \Phi ^T \mathcal K \Phi \) (Sect. 2.2, Eq. 3), as a characterization of the deformed manifold \(M'(\epsilon )\), is perturbed \((\alpha ,p)\)-smooth (Definition 6.1) as long as
Thus, spectral signatures (with an arbitrary number of dimensions) of both \(\mathcal K\) and \(\widetilde{\mathcal K}\) have finite error bounds under smooth manifold deformations (Theorem 6.2).
Proof
For a general Hilbert–Schmidt operator \(k\) satisfying uniformly \(\varepsilon \)-Hölder condition, it has already been shown in [34] that the decay rate of eigenvalues of \(k(x,y)\) is at least \(O(n^{-1/2-\varepsilon })\). And if \(k\) is positive definite, the decay rate is improved to at least \(O(n^{-{1}-\varepsilon })\). It immediately follows that for \(\varepsilon > \frac{1}{2}\), \(\varepsilon \)-Hölder continuous kernel \(\gamma _{\epsilon }\) is perturbed \((0,1)\)-smooth.
For \(\alpha >0\), we require the eigenvalues of the characterization kernel that have lower bounds on its decay rate. It is generally not true, for example if \(k(x,y)=d_M(x,y)^2\), the resulting Gram matrix has a finite number of nonzero eigenvalues if sample points are uniformly drawn from the Euclidean space. But it is typically tangible, as preliminary work has shown examples where condition (12) holds when \(k(x,y)=d_M(x,y)\) (e.g., see [7, 11] examples). Then following the main result on Hölder condition and the decay of eigenvalues [34], one has \(\dfrac{\left| \lambda _n(\gamma _{\epsilon }) \right| ^p}{\left| \lambda _n(k) \right| ^{\alpha }}\sim O(n^{-(\frac{1}{2} +\varepsilon )p+\alpha (1+q+\delta )})\).
Appendix B: Spectral convergence of R-BiHDM
Since we know eigenvalues of the Laplace–Beltrami operator follow \(\lambda _m \sim \frac{4\pi }{A} m\) for surfaces (Weyl-asymptotic growth of eigenvalue [45]), we can therefore deduce the convergence of a spectral sequence under weak assumptions. Note \(\left\| \cdot \right\| \) always denotes the \(L_2\)-norm of a vector, a function or a matrix, by default.
Lemma 1
Let \(A\in \mathbb {C}^{n\times n}\) be an Hermitian matrix, and let \((\hat{\lambda },\hat{x})\) be the computed approximation of an eigenvalue/eigenvector pair \((\lambda ,x)\) of \(A\). By defining the residual
it follows that
Proof
See [32] page 195. \(\square \)
Theorem 7.1
(Spectral convergence) Let \(\widetilde{K}_{m}\) be an \((m+1)\times (m+1)\) square matrix formed by the following steps: (i) take the first \(m+1\) rows and first \(m+1\) columns of \(\widetilde{K}\); (ii) when calculating each \(a_j\) in this truncated matrix, every infinite summation in (5) is approximated by the first \(m\) terms. Set \(\mu _i^{(m)}\) be the \(i\)-th eigenvalue of \(\widetilde{K}_m\), for \(i\le m+1\) and \(\mu _i{(m)}=0\), for any \(i> m+1\). Let \(f_m = \sqrt{A}\sum _{i=1}^m\phi _i^2/\lambda _i^2\) converge (pointwisely) to \(f\). If \(f\) is bounded and square integrable, i.e., eigenpairs \(\{(\lambda _i, \phi _i)\}_{i=1}^\infty \) satisfy
it then follows that for any \(i\),
Proof
By definition, we have \(\widetilde{K}_{m+n} - \widetilde{K}_{m-1}=\)
where extra rows and columns of zeros are padded to \(\widetilde{K}_{m-1}\), and
which is the Fourier coefficient of \(\sqrt{A}\phi _m^2\) w.r.t series \(\{\phi _j\}_{j=1}^{m-1}\). By Bessel’s inequality we have \(1+\sum _{j=1}^{m-1}C_{m,j}^2\le A\left\| \phi _m^2 \right\| ^2\), and we also have
By assumptions about \(f\) and the norm convergence of Fourier series (as shown for example in [1]), we know that \(\left\| f_{m+n} -f \right\| ^2\rightarrow 0\) and \(\sum _{k=m}^{\infty }\left| \int _M f\phi _k \right| ^2\rightarrow 0\) as \(m\rightarrow \infty \). Since the \(L_2\)-norm of a matrix is less than its Frobenius norm, we have
as \(m\rightarrow \infty \). By Lemma 1, we have
for any \(i<m\), where \(u^{(m)}_i\) is the eigenvector associated with \(\mu ^{(m)}_i\) of \(\widetilde{K}_{m}\). \(\{\mu _i^{(m)}\}_{m=1}^{\infty }\) is a Cauchy sequence, that converges. \(\square \)
Note that the condition, i.e., Eq. (13), used in the spectral convergence theorem is rather weak. Observe that for two-dimensional Riemannian manifold \(M\), \(f(x)\) is given by the green function \(G(x,y)\) with \(f(x):=G(x,x)\). If \(M\) is a compact manifold (without boundary), it satisfies that \(G(x,y)\) is bounded [6], hence \(f(x)\) is also bounded for any \(x\in M\). So is \(\left\| f \right\| ^2\) (square integrable). An experimental validation is also provided in Fig. 7.

A experimental validation: convergence of the first 30 eigenvalues of an R-BiHDM
Appendix C: Matrices for linear and cubic FEM

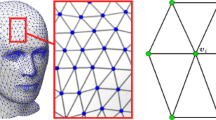
Node configuration of linear and cubic FEM
Here we provide elementary matrices used in linear and cubic FEM. Every FEM has its own set of nodes. There is a finite element associated with every node. The finite element at a specific node is a piecewise polynomial basis function whose value is equal to 1 at the node and 0 at all other nodes. The support of a basis function includes all triangle faces surrounding the node corresponding to the basis function. Consider a triangle face in a mesh with two node configurations shown in Fig. 8. These node configurations are defined for linear and cubic FEM, respectively. Each node in either configuration is associated with a piecewise linear or cubic polynomial basis function. If we focus on a triangle face, an arbitrary bivariate polynomial over the triangle face can be defined as a linear combination of the basis functions associated with the nodes either inside or on the edges of the triangle. This polynomial can interpolate arbitrary prescribed values at the nodes. It reduces to a univariate polynomial along each triangle edge. The two polynomials defined over two adjacent triangles agree with each other along their shared triangle edge. The stiff and mass matrices used in FEM are given as follows.
and
where \(T\) denotes a triangle face, \(N(T)\) denotes the set of incidence nodes on \(T\), \(t_i\) denotes the local index (used for \(T\)) of the \(i\)-th node used in the FEM, \(l_k(T)\) \((k=1,2,3)\) denotes the length of the \(k\)-th edge of \(T\), \(a(T)\) denotes the area of \(T\), and \(J_k(t_i,t_j)\) denotes the entry with indices \((t_i,t_j)\) of the matrix \(J_k\). \(J_k\) \((k=1,2,3,4)\) for linear and cubic FEM are given in Tables 6 and 7, respectively. Details on the construction of \(J_k\) can be found in [50]. Note that these matrices are assembled triangle-wise rather than element-wise in a typical implementation.
Rights and permissions
About this article

Cite this article
Ye, J., Yu, Y. A fast modal space transform for robust nonrigid shape retrieval. Vis Comput 32, 553–568 (2016). https://doi.org/10.1007/s00371-015-1071-5
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00371-015-1071-5