
Abstract
In this paper, we show that if a solution to the Muskat problem in the case of different densities and the same viscosity is sufficiently smooth, then it must be analytic except at the points where a turnover of the fluids happens.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The Muskat problem is a free boundary problem studying the interface between fluids in the porous media [30]. It can also describe the Hele–Shaw cell [34]. The density function \(\rho \) follows the active scalar equation
with
Here \(D_1(t)\) and \(D_2(t)\) are open domains with \(D_1(t)\cup D_2(t) \cup \partial D_{1}(t)=\mathbb {R}^2\). The velocity field v in (1.1) satisfies Darcy’s law,
and the incompressibility condition
where p is the pressure and \(\mu \) is the viscosity. \(\kappa \), g are the permeability constant and the gravity force.
We focus on the problem where two fluids have different densities \(\rho _1, \rho _2\) and the same viscosity \(\mu \).
After scaling, the equation for the boundary \(\partial D_{1}(t)\) in the periodic setting read as
for \(i=1,2\) (see [10]). Here \(f(\alpha ,t)=(f_1(\alpha ,t),f_2(\alpha ,t))\) is a parameterization of the boundary curve. \(f(\alpha ,t)-(\alpha ,0)\) is periodic in \(\alpha \).
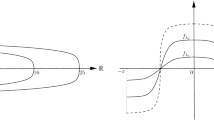
Given an initial interface at time 0, (1.3) is divided into three regimes. When the interface is a graph and the heavier fluid is on the bottom as in Fig. 1a, it is in a stable regime. When heavier fluid is above the boundary as in Fig. 1b, it is in a stable regime when time flows backward. Thus, given any initial data, (1.3) can be solved for small negative time t. In both regimes, shown in Fig. 1a, b, (1.3) can not be solved in the wrong direction unless the initial interface is real analytic. The third regime, shown in Fig. 1c, it highly unstable because the heavier fluid lies on top near point \(S_1\) while the lighter fluid lies on top near point \(S_2\). Note two turnover points \(T_1\) and \(T_2\) where the interface has a vertical tangent. For generic initial data in the turnover regime, (1.3) has no solutions either as time flows forward or backward.

Three regimes of the Muskat equation
In the third regime, there are several examples from the literature (eg. [9, 10, 19, 20]), but they are all real analytic solutions. Without the real analytic assumption, due to the spatially non-consistent parabolic behavior, the existence is usually false and the uniqueness is unknown. To address this gap, this paper studies to what extent the solution of (1.3) is analytic.
Moreover, for the analytic solutions, one can prove an energy estimate on an analyticity region that shrinks when time increases. That energy estimate implies uniqueness in the class of analytic solutions. [10]. Therefore, the investigation towards analyticity can serve as a first step to deal with the uniqueness.
We introduce a new way to prove that any sufficiently smooth solution is analytic except at the turnover points. Here is our main theorem:
Theorem 1.1
Let \(f(\alpha ,t)=(f_1(\alpha ,t),f_2(\alpha ,t))\in C^{1}([-t_0,t_0],H^{6}[-\pi ,\pi ]\times H^{6}[-\pi ,\pi ]))\) be a solution of the Muskat equation (1.3) satisfying the arc-chord condition. If \(\partial _{\alpha }f_1(\alpha _0,t)\ne 0\), and \(-t_0< t<t_0\), then \(f(\cdot ,t)\) is analytic at \(\alpha _0\).
Our method concerning the analyticity is not limited to the Muskat problem. A simplified version of our method can be used to show the analyticity of the solution to a kind of non-local differential equations (see Section 10). This approach is new to our best knowledge.
In our forthcoming work [35], we focus on the degenerate analyticity near the turnover points. The existence and uniqueness are crucially related to the way the real-analyticity degenerates at those points. Given an extra assumption, we have the following theorem in [35]:
Theorem 1.2
Let \(f(\alpha ,t)=(f_1(\alpha ,t),f_2(\alpha ,t))\in C^{1}([-t_0,t_0],C^{100}([-\pi .\pi ])\) be a solution of the Muskat equation (1.3) with two turnover points. \(Z_1(t)\), \(Z_2(t)\) are values of \(\alpha \) of these two turnover points. If we assume that the solution satisfies the following three conditions:
and
then when \(-t_0<t<t_0\), \(f(\cdot ,t)\) can be analytically extended to region \(\Omega =\{x+iy|-\epsilon _1(t)+Z_{1}(t)\le x\le Z_{1}(t)+\epsilon _1(t),|y|\le \epsilon _2(t)(x-Z_{1}(t))^2\}\).
1.1 Background
In order to make the equation well-defined, the arc-chord condition is introduced, saying that
is in \(L^{\infty }\).
The Rayleigh-Taylor coefficient \(\sigma \) is used to characterize the three regimes in Fig. 1 and is defined as
\(\sigma \ge 0\) is corresponding to the stable regime and \(\sigma \le 0\) the backward stable regime. When \(\sigma \) changes sign, it is in the unstable regime.
In the stable regime (heavier liquid is below the lighter liquid), local well-posedness and the global well-posedness with constraints on the initial data have been widely studied, with the lowest space \(H^{\frac{3}{2}}\) ( [1,2,3,4,5,6,7, 13,14,15,16,17, 21,22,25, 29, 31, 32, 36, 38, 39]). The existence of self-similar solutions has also been proved [28]. Interesting readers can see [13, 28] for detailed reviews. Due to the parabolic behavior, instant analyticity has been proved in the stable regime. Castro–Córdoba–Fefferman–Gancedo–López-Fernández [10] proved the \(H^4\) solutions become instantly analytic if the solutions remain to be in the stable region for a short time. In [29], also in the stable region, Matioc improved the instant analyticity to \(H^{s}\), where \(s\in (\frac{3}{2},3)\). In [27], Gancedo–García-Juárez–Patel–Strain showed that in the stable regime, a medium size initial data in \(\dot{\mathcal {F}^{1,1}}\cap L^2\) with \(\Vert f\Vert _{\mathcal {F}^{1,1}}=\int |\zeta ||\hat{f}(\zeta )|\text {d}\zeta \) becomes instantly analytic. Their result also covers the different viscosities case and the 3D case.
When the heavier liquid is above the lighter liquid, the equation is ill-posed when time flows forward [22].
A solution that starts from a stable regime and develops turnover points was first discovered in [10]. That solution still exists for a short time after turnover due to the analyticity when the turnover happens. Moreover, breakdown of smoothness can happen [9]. There are also examples where the solutions transform from stable to unstable and go back to stable [19] and vice versa [20].
Weak solutions and a special kind of weak solutions: mixing solutions of (1.1) have also been studied. They do not satisfy (1.3) and can develop a mixing zone. Weak solutions do not have uniqueness [18]. In all three regimes, there are infinitely many mixing solutions ( [8, 11, 12, 26, 33, 37]).
1.2 The outline of the Proof of Theorem 1.1
Inspired by the instant analyticity results in the stable case [10, 27, 29], our first idea is localization. If locally the lighter liquid is over the heavier one, we let the time go forward, and if locally the heavier one is over the lighter one, we let the time go backward.
Since it leads to lots of difficulties by the standard method due to the localization, we use a new idea to prove analyticity except at turnover points. The idea is to make a \(C^1\) continuation of the parametrized interface \(\alpha \rightarrow (f_1(\alpha ,t),f_2(\alpha ,t))\) to complex \(\alpha \) and then prove the \(C^1\) continuation satisfies the Cauchy-Riemann equation. To do so, we break the complex region into curves \(\alpha +ic(\alpha )\gamma t\) with \(\gamma \in [-1,1]\). On each such curve, we solve an equation for \((f_1,f_2).\) We then show that when \(\gamma \) varies, our solutions on the curve fit together into an \(C^1\) function of \(\alpha +i\beta \). Finally, we prove that \(C^1\) function satisfies the Cauchy-Riemann equation, thus producing the desired analytic continuation.
In Section 3, we define a cut off function \(\lambda (\alpha )\) and focus on \(f^c(\alpha ,t)=\lambda (\alpha )f(\alpha ,t)\). We then localize the equation such that the modified R-T condition has a fixed sign. In order to make use of the sign, if the sign is positive, we let the time go forward. If the sign is negative, we let the time go backward.
In Section 4, we introduce \(c(\alpha )\) with \(\textrm{supp} c(\alpha )\subset \{\alpha |\lambda (\alpha )=1\}\) (Fig. 2). With the assumption that \(f^c(\alpha ,t)\) is analytic in domain \(D_A=\{\alpha +i\beta |-c(\alpha )t\le \beta \le c(\alpha )t\}\), we derive the equation on the curve \(\{(\alpha +ic(\alpha )\gamma t)|\alpha \in [-\pi ,\pi ]\}\) for fixed \(\gamma \in [-1,1]\). Then we obtain the equation
with \(z(\alpha ,\gamma ,0)=f^c(\alpha ,0)\). The analyticity assumption on \(f^c\) is dropped after we get (1.8).

The curve \(c(\alpha )\) for Theorem 1.1
In Section 5, for each fixed \(\gamma \), we use the energy estimate and the Galerkin method to show the existence of the solution \(z(\alpha ,\gamma ,t)\). The main term is controlled by Gårding’s inequality, where we use a lemma from [9]. This part is similar as to [9, 10].
In Sections 6, 7, and 8, we verify that the \(z(\alpha ,0,t)\) coincides with the \(f^c(\alpha ,t)\) and that \(z(\alpha ,\gamma ,t)\) is also smooth enough with respect to \(\gamma \).
In Section 9, we derive some lemmas about the Cauchy-Riemann operator and use those lemmas to show analyticity of \(z(\alpha ,\frac{\beta }{c(\alpha )t}\gamma ,t)\) by checking that it satisfies the Cauchy-Riemann equations.
Remark 1.3
In [10], the analyticity domain can be chosen as a strip, and the analyticity follows directly from existence. Since our \(c(\alpha )\) is supported in a small region, we do not have such good behavior.
2 Notation
In the paper we will use the following notations:
\(\delta \): a sufficiently small number.
\(\lambda (\alpha )\): \(\lambda (\alpha )\ge 0\) and in \(C^{100}(-\infty ,\infty )\), satisfying
\(\delta _c\): sufficiently small number depending on \(\delta \).
\(c(\alpha )\):
\(f(\alpha ,t)=(f_1(\alpha ,t),f_2(\alpha ,t))\): the original solution of the Muskat equation.
\(f^c(\alpha ,t)\), \(\tilde{f}(\alpha ,t)\):
\(t_0\): the original solution exists when \(t\in [-t_0,t_0]\).
\(D_A\): \(D_A=\{(\alpha +i\beta )|-\infty< \alpha < \infty , -c(\alpha )t\le \beta \le c(\alpha )t\}.\)
For any vector function \(z =(z_1,z_2)\in H^{k}\): \(z_1\in H^{k}\) and \(z_2\in H^{k}\).
3 The Localization
This step is to localize the equation such that the R-T coefficient has a fixed sign. Without loss of generality, we study the behavior at origin and let \(\frac{\rho _2-\rho _1}{2}=1\). Let \(\lambda (\alpha ) \in C^{100}(-\infty ,\infty )\) satisfying \(\lambda (\alpha )\ge 0\) and
and \(f^{c}(\alpha ,t)=f(\alpha ,t)\lambda (\alpha )\), \( \tilde{f}(\alpha ,t)=f(\alpha ,t)(1-\lambda (\alpha ))\). Here \(\delta \) is a sufficiently small number such that when \(\alpha \in [-2\delta ,2\delta ]\), \(\partial _{\alpha }f_1(\alpha ,0)\) has a fixed sign. Without loss of generality, we assume
Then we have
We have \(f^c\in C^1([0,t_0], (H^6(\mathbb {T}))^2)\), \(\tilde{f}-(\alpha ,0)\in C^1([0,t_0], (H^6(\mathbb {T}))^2)\). Here \(\mathbb {T}\) is the torus of 2\(\pi \).
4 The Equation on the Complex Plane
4.1 Change the contour
Let \(c(\alpha )\) satisfy
Here \(c(\alpha )\) is defined such that \(\tilde{f}, \lambda \) can be analytically extended to the complex domain \(D_A=\{(\alpha +i\beta )|-\infty< \alpha < \infty , -c(\alpha )t\le \beta \le c(\alpha )t\}\) and satisfy
and
for any \(\gamma \in [-1,1].\)
Now we assume \(f^c\) is also analytic in this complex domain \(D_A\). For any fixed \(\gamma \in [-1,1]\), we want to find the new equation on the contour \(\{\alpha +ic(\alpha )\gamma t|\alpha \in [-\pi ,\pi ]\}\). Let \(\alpha _{\gamma }^t=\alpha +ic(\alpha )\gamma t\). We have
4.2 The equation on the curve
Let \(z(\alpha ,\gamma ,t)\) be the solution of the equation (4.4) with initial data \(z(\alpha ,\gamma ,0)=f^c(\alpha ,0)\). Our motivation is to set \(z(\alpha ,\gamma ,t)=f^{c}(\alpha +ic(\alpha )\gamma t,t).\) Since
we have
with
We drop the analyticity assumption of \(f^c\) from now. Notice that \(\tilde{f}\) and \(\lambda \) can still be analytically extended to \(D_A\) as in (4.2) and (4.3).
5 The Existence of z for Fixed \(\gamma \)
5.1 Energy estimate
We first assume z is of finite Fourier modes here and do the energy estimate. The idea of the energy estimate is similar as in [9, 10].
Since \(\tilde{f}(\alpha +ic(\alpha )\gamma t,t)=\tilde{f}(\alpha ,t)\), \(\lambda (\alpha +ic(\alpha )\gamma t)=\lambda (\alpha )\), we have
Here we omit the dependency of z on \(\gamma \) and t, and the dependency of \(\tilde{f}\) on t for the sake of simplicity. Let
where \(\mathbb {T}\) is the torus of length \(2\pi \) and
For the \(L^2\) norm, we have
Here C is a bounded function depending on \(\delta \), \(\delta _c\) and \(\Vert f\Vert _{C^1([0,t],(H^6[-\pi ,\pi ])^2)}\). We will keep using the same notation C in the following proof.
Now we take 5th derivative and have
Here \(O^i\) terms contain at most 5th derivative on both z and \(\tilde{f}\).
Before we show the explicit form of \(O^i\), we introduce some notations. Let
\(V_{g,i}^k(\alpha )\) is the ith component in \(V_{g}^k(\alpha )\) and \(\tilde{V}_{g,i}^k(\alpha )\) the ith component in \(\tilde{V}_{g}^k(\alpha )\).
When we write \(X_i(\alpha ,t)\), we mean
with \(l_i\le 5\).
A function \(K_{-\sigma }^{j}(A,B)\), \(K_{-\sigma }^{j}(A,B,C)\) is of \(-\sigma \) type if, for A, B, C in \(R^n\), it has the form
with \(m_1+m_3+m_5+m_6+m_7-2m_0\ge -\sigma \). \(c_j\) is a constant.
We claim that we can write \(O^{i}\) as following three types, by separating the highest order term in the derivative. Here we omit the dependency on \(\gamma \) and t.
where \(\tilde{z}^3\in V_z^{3} \cup \tilde{V}_z^{3}\cup V_{\tilde{f}}^3\), \(1\le b_i\le 5\).
where \(\tilde{z}^{5}\in V_z^{5} \cup \tilde{V}_z^{5}\cup V_{\tilde{f}}^5\), \(1\le b_i\le 5\).
where \(1\le b_i, b_i'\le 5\).
Then we have the following lemmas:
Lemma 5.1
We have
Proof
Since \(K_{-1}^{i}\) is of \(-1\) type, we have
we could use Lemma 11.4 to get the result for \(O^{1,i}\). Moreover, we have
we then use Lemma 11.2 to get the estimate for \(O^{2,i}\). \(O^{3,i}\) can be bounded easily. \(\square \)
Lemma 5.2
We have
Proof
Let
It is also of \(K_{-1}\) type. We have
Then the result follows from Lemma 11.2. \(\square \)
Then we are left to deal with \(T_1+T_2\).
By using the same notation as in Lemma 5.2, we have
Moreover, we could further split the \(T_{2,2}\) and have
Since \(K(z(\alpha )-z(\beta ),\tilde{f}(\alpha )-\tilde{f}(\beta ))\) is of \(-1\) type, we have
Let
Then
We can do the integration by parts in \(T_{2,2,2}(z)\) to get that
Therefore we have
In conclusion, we have
where \(\Lambda \) is \((-\Delta )^{\frac{1}{2}}\) on the Torus \(\mathbb {T}\) of length \(2\pi \) and
Then we have
where \(B.T.\le C(\Vert z\Vert _{Arc}+\Vert z\Vert _{U}).\) Next we show a lemma for controlling the main terms.
Lemma 5.3
If \(L_1(\alpha )\), \(L_2(\alpha )\in C^2(\mathbb {T})\), \(-\Re L_1(\alpha )\ge |\Im L_2(\alpha )|\), \(h\in H^1(\mathbb {T})\), then we have
Proof
First, we have
We could do the integration by parts to \(I_{2,1}\) and have
Moreover,
We can still do the integration by parts to the \(I_{1,2}\) and have
Moreover, for any \(g_1\in H^2(\mathbb {T})\), \(g_2\in H^1(\mathbb {T})\), we have
Hence
Now we are left to control \(I_{1,M}+I_{2,s}\). We have
Now we use a lemma from [9, Section 2.4].
Lemma 5.4
Let a, b be real valued functions on \(\mathbb {T}\), \(a(\alpha )\ge |b(\alpha )|\) and satisfying \(a,b \in C^2(\mathbb {T})\). Then we have
Then, from Lemma 5.4, we have
Then we get the result. \(\square \)
Now let
and
Since \(\textrm{supp} c(\alpha )\subset \{\alpha | \lambda (\alpha )=1\}\), from (5.9), we have
From Lemma 5.3, if \(-\Re L_{z}^1(\alpha )\ge |\Im L_z^2(\alpha )|\) for \(\alpha \in [-2\delta ,2\delta ]\), since \(\textrm{supp} \lambda \subset [-2\delta ,2\delta ]\), we have
Moreover, when \(t=0\), \(\alpha \in [-2\delta ,2\delta ]\), from (5.10), (5.11) and (5.5) we have
and
From (3.1), we could choose \(\delta _c\) in (4.1) to be sufficiently small and have
Then let
If \(\Vert z\Vert _{RT}(t)< \infty \), we have
Therefore, we could let \(\Vert z\Vert _{\tilde{U}}=\Vert z\Vert _{U}+\Vert z\Vert _{Arc}+\Vert z\Vert _{RT}\). From (5.12), and the following Lemma 5.5, we have
Then \(\Vert z(\alpha ,\gamma ,t)\Vert _{\tilde{U}}\) is bounded for sufficiently small time \(t_1\). We claim that the bound and the time can be chosen such that it holds for all \(\gamma \in [-1,1]\).
Lemma 5.5
We have the following two estimates:
and
Proof
For \(\Vert z\Vert _{RT}\), we have
From (5.10), we have
From (5.1), it is easy to get
Then
From (5.11), we have
From condition (5.6) and Lemma 11.1, we have
Moreover, \(\nabla _1 K(z(\alpha )-z(\beta ),\tilde{f}(\alpha )-\tilde{f}(\beta ))\) is of \(-2\) type, and
From (5.1), it is easy to get
Then \(Term_{2,1}\lesssim C(\Vert z\Vert _{\tilde{U}})\). Hence
Then we have the estimate
Moreover, we have
We also introduce a corollary here to be used in a later section.
Corollary 5.6
For \(g(\alpha )\in H^1(\mathbb {T})\), if \(z\in H^5(\mathbb {T})\), \(\Vert z\Vert _{Arc}< \infty \) and \(-\Re L_z^1(\alpha )-|\Im L_z^2(\alpha )|>0\) when \(\alpha \in [-2\delta ,2\delta ]\), \(\gamma \in [-1,1]\), then we have
\(\square \)
5.2 Approximation for the picard theorem
Now we approximate the problem and have the following equations,
where
with
and initial value \(z^n(\alpha , \gamma , 0)=\varphi _{n}*f(\alpha ,0)\). Here the convolution of \(\varphi _n\) is the projection to the finite Fourier modes of \(\alpha \).
By the Picard theorem, for any fixed \(\gamma \in [-1,1]\), there exists solutions in \(C^1([0,t_{n}], H^5_{\alpha }(\mathbb {T}))\). Moreover, by the structure of our approximation, we have \(z^n=\varphi _{n}*z^n\), and for \(1\le j\le 5\),
Then we can do the energy estimate similar to that the previous section by letting
where
with \(\Delta ((\varphi _n*z_{2}^n)(\alpha )+\tilde{f_2}(\alpha ))\) and \(\Delta ((\varphi _n*z_{1}^n)(\alpha )+\tilde{f_1}(\alpha ))\) from (5.13), (5.14), and letting
with
Then we can use the similar energy estimate and the compactness argument to show there exist a solution
satisfying
for sufficiently small time \(t_1\). Moreover,
and
Since the energy estimate has a bound for all \(\gamma \in [-1,1]\), we have a existence time \(t_1\) that holds for all \(\gamma \).
Now we abuse the notation and write T(z) as \(T(z(\alpha ,\gamma ,t),\gamma ,t)\). We have the following lemma:
Lemma 5.7
For any \(g(\alpha ),h(\alpha )\in H^{j+1}(\mathbb {T})\), \(j=3,4,\) \(\Vert g\Vert _{Arc}< \infty \) and \(\Vert h\Vert _{Arc}<\infty \), we have
Proof
We only show (5.19) and the left can be shown in the same way. From (5.1), we have
It is trivial that \(T_1\) satisfying the (5.19) since \(c(\alpha )\) is sufficiently smooth.
Moreover, the \(\partial _{\alpha }\tilde{f}\in H^5(\mathbb {T})\) and is more regular than \(\frac{\partial _{\alpha }g(\alpha )}{1+ic'(\alpha )\gamma t}.\) Hence we only consider \(T_2\). For \(T_2\), we have
Then
Moreover, we can use the notation from (5.4), (5.2), and get
Here \(\tilde{z}^{j}\in V_g^{j} \cup \tilde{V}_g^{j}\cup V_{\tilde{f}}^j\). \([\frac{j+1}{2}]\) is the biggest integer less than \(\frac{j+1}{2}\). Then from (5.22), we could use Lemma 11.2 to bound \(Term_{2,1}\). Moreover, since \(j+1-[\frac{j+1}{2}]\ge [\frac{j+1}{2}]\ge 2 \). We have
Then we could use Lemma 11.4 to bound \(Term_{2,2}\). \(\square \)
Then from Lemma 5.7, (5.15) and (5.16), we have
6 The Uniqueness
In this section we show there exists sufficiently \(0<t_2\le t_1\) such that for \(0\le t\le t_2\), we have \(z(\alpha ,0,t)=f^c(\alpha ,t)\).
Let \(z^0(\alpha ,t)=z(\alpha ,0,t)\). From (5.1) and (5.5), we have
Moreover, from (3.2), we have
Then we have the equation for the difference:
We first control \(Term_2\), we have
Since the component of \(\nabla K\) is of \(-2\) type, we have
When \(t=0\), we have \(z^0=f^c\), then
Moreover, we have the following lemma:
Lemma 6.1
For \(g,h\in C^1(\mathbb {T})\), \(\Vert h\Vert _{Arc}< \infty \), there exists \(\delta \) depending on \(\Vert h\Vert _{Arc}\) and \(\Vert h\Vert _{C^1(\mathbb {T})}\) such that when \(\Vert g-h\Vert _{C^1(\mathbb {T})}\le \delta \), we have \(\Vert g\Vert _{Arc}<\infty .\)
Proof
We have
and
Since
we have
Then we have the result. \(\square \)
Since we have \(z^0(\alpha ,t)\in C^{1}([0,t_1],H^3(\mathbb {T}))\), \(f^c(\alpha ,t)\in C^{1}([0,t_1],H^6(\mathbb {T}))\), then from (6.3), and Lemma 6.1, there exists \(t_2\), satisfying \(0\le t_2\le t_1\), such that for \(0\le t\le t_2\),
Then from corollary 11.3, (6.1),(6.2), and (6.4), we have
Then
where \(B.T^0\lesssim \Vert z^0(\alpha ,t)-f^c(\alpha ,t)\Vert _{L^2[-\pi ,\pi ]}^2\). Then from corollary 5.6 when \(\gamma =0\), conditions (5.18), (5.15), (5.17), we have
Moreover, we have \(z^0(\alpha ,0)=f^c(\alpha ,0)\). Therefore we have
for \(0\le t\le t_2\).
7 The Continuity of z with Respect to \(\gamma \)
We first show \(\Vert z(\alpha , \gamma , t)-z(\alpha ,\gamma ',t)\Vert _{H^3(\alpha )}\lesssim |\gamma -\gamma '|\).
For the sake of simplicity, we further shrink the time \(t_1\) to \(\tilde{t}_1\) such that for all \(0\le t\le \tilde{t}_1\), \(\gamma ,\gamma '\in [-1,1]\), \(\tau \in [0,1]\), we have \( \Vert \tau z(\alpha ,\gamma ,t)+(1-\tau )z(\alpha ,\gamma ',t)-\tau z(\alpha ,\gamma ,0)-(1-\tau )z(\alpha ,\gamma ',0)\Vert _{C^1(\mathbb {T})}=\Vert \tau z(\alpha ,\gamma ,t)+(1-\tau )z(\alpha ,\gamma ',t)-f^c(\alpha ,0)\Vert _{C^1(\mathbb {T})}\) is sufficiently small. Then from Lemma 6.1, we have
This is not necessary but helps to simplify our estimate in this section.
Now we estimate the difference, we have
For \(Term_2\), we have
Since \(z(\alpha ,\gamma ,t)\in L^{\infty }_{t}([0,t_0],H^5(\mathbb {T}))\), we have
Moreover,
Since K is of \(-1\) type, we have
Therefore \(\Vert Term_{2,2}\Vert _{H^3(\mathbb {T})}\lesssim 1\). Moreover, \(Term_{2,3}\) can be bounded in the similar way since \(|\frac{\partial _{\alpha }\tilde{f}(\alpha )-\partial _{\beta }\tilde{f}(\beta )}{\alpha -\beta }|\in C^3([-2\delta ,2\delta ]\times [-\pi ,\pi ])\) and we get
Then we have
and
For \(Term_1\), notice that \(\tilde{f}(\alpha +ic(\alpha )\gamma t,t)=\tilde{f}(\alpha ,t)\), we have
It is easy to get that
Moreover,
Since the component of \(\nabla _1 K\) is of \(-2 \) type, we have
then we have
Now we control \(\partial _{\alpha }^3 Term_1\). For \(\partial _{\alpha }^{3}Term_{1,1}\), we have
Here \(\Vert Term_{1,1,2}^3\Vert _{L^2(\mathbb {T})}\lesssim \Vert z(\alpha ,\gamma )-z(\alpha ,\gamma ')\Vert _{H^3(\mathbb {T})}\). For \(\partial _{\alpha }^{3}Term_{1,2}\), from Lemma 11.6 and (7.3), we have
where \(\Vert Term_{1,2,1}^3\Vert _{L^2(\mathbb {T})}\lesssim \Vert z(\alpha ,\gamma )-z(\alpha ,\gamma ')\Vert _{H^3(\mathbb {T})}\). Moreover, we have
Then from Lemma 11.2, we have
For \(\partial _{\alpha }^3 Term_{1,3}\), we use equation (7.8). Since
and
from Lemma 11.7 we have
In conclusion, from (7.7), (7.9), and (7.5), we have
From (7.10), (7.11), (7.12), (7.13), (7.14) and (7.5), we have
where
Then from corollary 5.6, we have
Moreover, the initial date \(\Vert z(\alpha ,\gamma )-z(\alpha ,\gamma ')\Vert _{H^3(\mathbb {T})}^2|_{t=0}=0\). Therefore we have
8 The Differentiability of z with Respect to \(\gamma \)
Now we show the differentiability. We define a new function \(w(\alpha ,\gamma ,t)\). It satisfies the equation that \(\frac{dz}{d\gamma }\) would satisfy if it is differentiable.
Let w be the solution of the equation
with initial value \(w(\alpha ,\gamma ,0)=0\). Here \(D_z T(z(\alpha ,\gamma ,t),\gamma ,t)[w]\) is the Gateaux derivative.
As in the existence of \(z(\alpha ,\gamma ,t)\), we first show the energy estimate. First, from (7.4), we have
Moreover,
It has the similar structure as (7.6) and (7.8). The only difference between the first two terms in (7.6) and (8.2) is that \(\partial _{\alpha } w(\alpha ,\gamma )\) takes the place of \(\frac{z(\alpha ,\gamma )-z(\alpha ,\gamma ')}{\gamma -\gamma '}.\) In (7.8), and the third term of (7.6), \(w(\alpha ,\gamma )\) takes the place of \(\frac{z(\alpha ,\gamma )-z(\alpha ,\gamma ')}{\gamma -\gamma '}\) and \(\int _{0}^{1}\nabla _1 K(\tau (z(\alpha ,\gamma )-z(\beta ,\gamma ))+(1-\tau )(z(\alpha ,\gamma ')-z(\beta ,\gamma ')),\tilde{f}(\alpha )-\tilde{f}(\beta ))d\tau \) is replaced by \(\nabla _1 K(z(\alpha ,\gamma )-z(\beta ,\gamma ),\tilde{f}(\alpha )-\tilde{f}(\beta ))\). Therefore we could use the similar estimate and have
As in the existence of \(z(\alpha ,\gamma ,t)\), we could do the similar energy estimate to the approximation of the equation
with initial value \(w^n(\alpha ,\gamma ,0)=0\). Then from the Picard theorem and compactness argument, there exists \(0\le t_3\le t_1\), such that
and
We claim there is an uniform \(t_3\) holds for all \(\gamma \in [-1,1]\). Moreover, we have the following lemma:
Lemma 8.1
For any \(g(\alpha ),h(\alpha )\in H^{j+1}(\mathbb {T})\), \(j\le 2\), we have
Proof
It is easy to get these bounds since \(z(\alpha ,\gamma ,t)\in L^{\infty }([0,t_0], H_{\alpha }^5(\mathbb {T}))\cap C^{0}([0,t_0], H_{\alpha }^4(\mathbb {T})).\) \(\square \)
Then we have \(w(\alpha ,\gamma ,t)\in L^{\infty }([0,t_3], H_{\alpha }^3(\mathbb {T}))\cap C^{0}([0,t_3], H_{\alpha }^2(\mathbb {T}))\cap C^{1}([0,t_3], H_{\alpha }^1(\mathbb {T})).\)
We claim that we could do the similar argument as in the estimate of \(\Vert z(\alpha ,\gamma )-z(\alpha ,\gamma ')\Vert _{H^3_{\alpha }(\mathbb {T})}\lesssim |\gamma -\gamma '|\) to get
Then from (8.4), we have
Now we show w is the derivative of z with respect of \(\gamma \). Let
We have
From (7.2) and (7.15), we have
and
Then
Moreover, for \(Term_1\), from (8.2), (7.1), (7.6) and (7.8), we have
Here
Since the component of \(\nabla _1 K\) is of \(-2\) type, we could use Lemma 11.2 to bound \(Term_{1,5}\) and have
For \(Term_{1,6}\), we have
Then from Lemma 11.3, and (7.15), we have
From Lemma 11.3, we again have
where we use (8.4) and (7.15). Therefore we have
where
Then by corollary 5.6, and the initial value \(v(\alpha ,\gamma ,\gamma ',0)=0\), from the Gronwall’s inequality we have \(\lim _{\gamma '\rightarrow \gamma }\Vert v(\alpha ,\gamma ,\gamma ',t)\Vert _{L^2(\mathbb {T})}=0\) when \(t\le t_3\).
Form (8.4), and (7.15), we have
Moreover from the interpolation theorem, we have
Then from (8.8), we have
with
From (8.1), we also have
In conclusion we have
9 The Analyticity
In this section, we want to show \(f(\alpha ,t)\) is a real analytic function near 0 for each fixed t, \(0< t< t_3\). We first show that it is enough to prove that
Lemma 9.1
If z satisfies (9.1), then f(x) can be analytically extended to \(D_A=\{\alpha +iy|-\infty<\alpha <\infty , -c(\alpha )t\le y\le c(\alpha )t\}.\)
Proof
From the uniqueness (6.5), we have \(z(\alpha ,0,t)=f^c(\alpha ,t)\). Then
is a extension of \(f^c(\alpha ,t)\) on \(D_A.\) Moreover, when \(c(\alpha )\ne 0\), we have
Then we have
Now let \(\frac{y}{c(\alpha )t}=\gamma \). Then
Moreover, \(z(\alpha ,\gamma ,t)\in C^1_{\gamma }([-1,1],H^2_{\alpha }(\mathbb {T}))\). Then \(\partial _{\alpha }f^c\), \(\partial _{\gamma }f^c\) are continuous. Therefore we have the analyticity of \(f^c\) near 0. We also have \(f(\alpha ,t)=f^c(\alpha ,t)\) when \(|\alpha |\le \delta \). Then we have the result. \(\square \)
Let
Before we prove \(A_0(z)=0\), we introduce some general lemmas.
Lemma 9.2
If all the derivatives are well-defined and \(\partial _{\alpha }\partial _{\gamma }h(\alpha ,\gamma ,t)=\partial _{\gamma }\partial _{\alpha }h(\alpha ,\gamma ,t)\), we have
Proof
First, for the right hand side, we have
Also
From the two equalities above, we have the result. \(\square \)
Lemma 9.3
If all the derivatives are well-defined and we have
and \(\frac{d}{d\alpha }\frac{d}{dt}h=\frac{d}{dt}\frac{d}{d\alpha }h\), \( \frac{d}{dt}\frac{d}{d\gamma }h=\frac{d}{d\gamma }\frac{d}{dt}h\), \(\frac{d}{d\alpha }\frac{d}{d\gamma }h=\frac{d}{d\gamma }\frac{d}{d\alpha }h\), then we have
Proof
First,
Moreover, we have
and
Therefore
\(\square \)
Lemma 9.4
Let \(\tilde{K}\) be meromorphic. \(\partial _{\alpha }X(\alpha ,\gamma )\), \(\partial _{\gamma }X(\alpha ,\gamma )\) are well-defined and in \(C_{\alpha }^{0}[-\pi ,\pi ]\), \(\partial _{\alpha }h(\alpha ,\gamma )\) and \(\partial _{\gamma }h(\alpha ,\gamma )\) are well-defined vector functions with components in \(C_{\alpha }^{0}[-\pi ,\pi ]\). If for fixed \(\alpha \), there is no singular point in the integrals below and \(c(\pi )=c(-\pi )=0\), \(c(\alpha )\in W^{2,\infty }\), then we have
Here \(D_h\) is the Gateaux derivative.
Proof
We have
Moreover,
We use the condition that \(c(-\pi )=c(\pi )=0\) and we could get the \(Term_1+Term_{2,2}+Term_{3,2}+Term_4=0\). Then we have the result. \(\square \)
Now we use Lemmas 9.2, 9.3, 9.4, to show the result. From (4.5) and (5.5), we have
Since we have \(A_0(\lambda (\alpha _{\gamma }^{t}))=0\), from Lemma 9.3, we get
Let
and
then by Lemmas 9.4 and 9.2 and \(A_0((\partial _{\alpha }\tilde{f_{\mu }})(\alpha _{\gamma }^t,t))=0\), and \(A_0(\tilde{f_{\mu }}(\alpha _{\gamma }^t,t))=0\), we have
Since
by Lemma 11.3, we have
Then by corollary 5.6, we have
Moreover when \(t=0\), \(A_0(z)=-\partial _{\gamma }z(\alpha ,\gamma ,0)=-\partial _{\gamma }f(\alpha ,0)=0\). Therefore \(A_0(z)=0\), when \(t\le t_3\).
10 Using the Energy Estimate to Show the Analyticity
Following an idea similar to that in the previous sections, we introduce a way to study the analyticity of the solution to some differential equations, which is, to our knowledge, a new method.
Theorem 10.1
Let T(f) be an operator satisfying the conditions below. We assume that there exists \(\epsilon >0\), \(k\ge 1\), \(f_0\in H^{k}(\mathbb {T})\), such that when \(\Vert f-f_0\Vert _{H^{k}}\lesssim \epsilon \),
-
(a)
(Boundedness) \(T(f):H^{k}(\mathbb {T})\rightarrow H^{k}(\mathbb {T})\) with \(\Vert T(f)\Vert _{H^{k}(\mathbb {T})}\lesssim 1\),
-
(b)
(Existence and boundedness of the Fréchet derivative )\(\Vert D_{f}(T(f))[h]\Vert _{H^{k}(\mathbb {T})}\lesssim \Vert h\Vert _{H^k(\mathbb {T})},\)
-
(c)
(\(L^2\) boundedness of the Fréchet derivative) \(\Vert D_{f}(T(f))[h]\Vert _{L^{2}(\mathbb {T})}\lesssim \Vert h\Vert _{L^2(\mathbb {T})}\),
-
(d)
\(\frac{d}{dx}T(f)=D_{f}(T(f))[\frac{df}{dx}]\),
-
(e)
\(iD_f(T(f))[h]=D_f(T(f))[ih]\).
Here \(\mathbb {T}\) is the torus of length \(2\pi \). If \(f_0(x)\) also satisfies the equation
\(f_{0}(x)\) must be real analytic.
Proof
First, we assume \(f_0\) to be an analytic function with analytic continuation f(x, t). Then through the Cauchy-Riemann equation and (10.1), we have
Our goal is to show this solution f(x, t) does exist and is analytic.
Through (a), (b), we have
We can use the Picard theorem to show there is a solution satisfying
with \(|t|<t_0\) for some \(t_0>0\). Moreover
By (10.3), we have
Hence
Therefore we have
and
Then we can control \(\Vert \frac{d}{dx}f(x,t)+i\frac{d}{dt}f(x,t)\Vert _{L^2(\mathbb {T})}\). We have
Here the first equality follows from (10.5), the second from (10.4).
Through (10.1), (10.2), we have
Moreover, from(10.5), \(\Vert \frac{d}{dx}f(x,t)+i\frac{d}{dt}f(x,t)\Vert _{L^2(\mathbb {T})}^2\in W^{1,\infty }(-t_0,t_0).\) Then
Hence we can use the Gronwall inequality and get
Moreover, since \(k\ge 1\), from (10.3), we have \(\frac{d}{dt}f(x,t)\in W^{1,\infty }((-t_0,t_0),H^{1}(\mathbb {T}))\). Then \(\frac{d}{dt}f(x,t)\) is continuous in x and t. Therefore \(\partial _{x}f(x,t)\) is continuous in x and t.
Then by the (10.7) and (10.2), we have the analyticity. \(\square \)
Data Availability Statement
Data sharing not applicable to this article as no datasets were generated or analysed during the current study.
References
Abels, H., Matioc, B.-V.: Well-posedness of the muskat problem in subcritical lp-sobolev spaces. Eur. J. Appl. Math. 33(2), 224–266, 2022
Alazard, T., Lazar, O.: Paralinearization of the Muskat equation and application to the Cauchy problem. Arch. Ration. Mech. Anal. 237(2), 545–583, 2020
Alazard, T., Nguyen, Q.-H.: Endpoint sobolev theory for the muskat equation. arXiv: Analysis of PDEs, 2020
Alazard, T., Nguyen, Q.-H.: On the cauchy problem for the muskat equation with non-lipschitz initial data. Commun. Partial Differ. Equ. 46(11), 2171–2212, 2021
Alazard, T., Quoc, H.: On the cauchy problem for the muskat equation. ii: Critical initial data. Ann. PDE 7, 06, 2021
Ambrose, D.M.: Well-posedness of two-phase hele-shaw flow without surface tension. Eur. J. Appl. Math. 15, 597–607, 2004
Cameron, S.: Global well-posedness for the two-dimensional muskat problem with slope less than 1. Anal. PDE 12, 997–1022, 2018 01
Castro, Á. Córdoba, D., Faraco, D.: Mixing solutions for the muskat problem. arXiv preprint arXiv:1605.04822, 2016
Castro, Á., Córdoba, D., Fefferman, C., Gancedo, F.: Breakdown of smoothness for the muskat problem. Arch. Ration. Mech. Anal. 208(3), 805–909, 2013
Castro, Á., Córdoba, D., Fefferman, C., Gancedo, F., López-Fernández, M.: Rayleigh-taylor breakdown for the Muskat problem with applications to water waves. Ann. Math. 2(175), 909–948, 2012
Castro, Á., Faraco, D., Mengual, F.: Degraded mixing solutions for the muskat problem. Calc. Var. Partial. Differ. Equ. 58, 1–29, 2019
Castro, Á., Faraco, D., Mengual, F.: Localized mixing zone for muskat bubbles and turned interfaces. Ann. PDE 8(1), 7, 2022
Chen, K., Quoc, H., Xu, Y.: The muskat problem with \(\cal{C}^1\) data. Trans. Am. Math. Soc. 9 2021
Cheng, C.A., Granero-Belinchón, R., Shkoller, S.: Well-posedness of the muskat problem with h2 initial data. Adv. Math. 286, 32–104, 2016
Constantin, P., Córdoba, D., Gancedo, F., Strain, R.M.: On the global existence for the muskat problem. J. Eur. Math. Soc. 15, 201–227, 2013
Constantin, P., Córdoba, D., Gancedo, F., Strain, R.: On the muskat problem: Global in time results in 2d and 3d. Am. J. Math. 138, 10, 2013
Constantin, P., Gancedo, F., Shvydkoy, R., Vicol, V.: Global regularity for 2d muskat equations with finite slope. Annales de l’Institut Henri Poincaré C, Analyse non linéaire 34(4), 1041–1074, 2017
Cordoba, D., Faraco, D., Gancedo, F.: Lack of uniqueness for weak solutions of the incompressible porous media equation. Arch. Ration. Mech. Anal. 200, 725–746, 2011
Córdoba, D., Gómez-Serrano, J., Zlatoš, A.: A note on stability shifting for the Muskat problem. Philos. Trans. R. Soc. Lond. 373(2050), 20140278, 10, 2015
Córdoba, D., Gómez-Serrano, J., Zlatoš, A.: A note on stability shifting for the Muskat problem, II: From stable to unstable and back to stable. Anal. PDE 10(2), 367–378, 2017
Córdoba, A., Córdoba, D., Gancedo, F.: Interface evolution: the hele-shaw and muskat problems. Ann. Math. 173(1), 477–542, 2011
Córdoba, D., Gancedo, F.: Contour dynamics of incompressible 3-d fluids in a porous medium with different densities. Commun. Math. Phys. 273, 445–471, 2007 06
Córdoba, D., Gancedo, F.: A maximum principle for the muskat problem for fluids with different densities. Commun. Math. Phys. 286, 12, 2007
Córdoba, D., Lazar, O.: Global well-posedness for the 2d stable muskat problem in \(h^{3/2}\). Annales scientifiques de l’École Normale Supérieure 54, 03, 2018
Deng, F., Lei, Z., Lin, F.: On the two-dimensional muskat problem with monotone large initial data. Commun. Pure Appl. Math.70, 2016
Förster, C., Székelyhidi, L.: Piecewise constant subsolutions for the muskat problem. Commun. Math. Phys. 363, 1051–1080, 2018
Gancedo, F., García-Juárez, E., Patel, N., Strain, R.: On the muskat problem with viscosity jump: Global in time results. Adv. Math. 345, 552–597, 2019
García-Juárez, E., Gómez-Serrano, J., Nguyen, H.Q., Pausader, B.: Self-similar solutions for the muskat equation. 2021
Matioc, B.-V.: The Muskat problem in 2d: equivalence of formulations, well-posedness, and regularity results. Anal. PDE, 2018. To appear
Muskat, M.: Two fluid systems in porous media. the encroachment of water into an oil sand. Physics 5(9), 250–264, 1934
Nguyen, H., Pausader, B.: A paradifferential approach for well-posedness of the muskat problem. Arch. Ration. Mech. Anal. 237, 07, 2020
Nguyen, H.Q.: Global solutions for the muskat problem in the scaling invariant besov space \( \dot{B}^1_{\infty, 1}\). Adv. Math. 394, 108122, 2022
Noisette, F., Székelyhidi, L.: Mixing solutions for the muskat problem with variable speed. J. Evol. Equ. 21, 3289–3312, 2021
Shaw, H.H.: On the motion of a viscous fluid between two parallel plates. Nature 58, 34–36, 1898
Shi, J.: Regularity of solutions to the muskat equation ii: the degenerated regularity near the turnover points. 2022. In preparation
Siegel, M., Caflisch, R., Howison, S.: Global existence, singular solutions, and ill-posedness for the muskat problem. Commun. Pure Appl. Math. 57, 1374–1411, 2004 10
Székelyhidi, L., Jr.: Relaxation of the incompressible porous media equation. In Annales scientifiques de l’Ecole normale supérieure 45, 491–509, 2012
Yi, F.: Global classical solution of muskat free boundary problem. J. Math. Anal. Appl. 288(2), 442–461, 2003
Yi, F.: Local classical solution of muskat free boundary problem. J. Math. Anal. Appl. 288, 442–461, 2003 12
Acknowledgements
The author sincerely thanks Charles Fefferman for introducing this problem and for all the helpful discussions. The author also gratefully thanks Javier Gomez-Serrano and Jaemin Park for useful discussions on Section 10. This material is based upon work while the author studied at Princeton University. JS was partially supported by NSF through Grant NSF DMS-1700180 and by the European Research Council through ERC-StG-852741-CAPA.
Funding
Open Access funding provided by the MIT Libraries.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing Interests
1. JS was partially supported by NSF through Grant NSF DMS-1700180 and by the European Research Council through ERC-StG-852741-CAPA. 2. The author has no relevant financial or non-financial interests to disclose.
Additional information
Communicated by V. Šverák.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Lemma 11.1
For \(G(\alpha ,\beta )\in C^1([-2\delta ,2\delta ]\times [-\pi ,\pi ])\), we have
Proof
We have
\(\square \)
Lemma 11.2
For \(g(\alpha )\in L^2[-\pi ,\pi ]\), \(G(\alpha ,\beta )\in C^1([-2\delta ,2\delta ]\times [-\pi ,\pi ])\), we have
Proof
We have
Here
and
\(\square \)
Corollary 11.3
For \(g(\alpha )\in L^2[-\pi ,\pi ]\), \(h(\alpha )\in C^2[-\pi ,\pi ]\), \(G(\alpha ,\beta )\in C^1([-2\delta ,2\delta ]\times [-\pi ,\pi ])\), we have
Proof
We can use Lemma 11.2 and let \(\tilde{G}(\alpha ,\beta )=G(\alpha ,\beta )\frac{h(\alpha )-h(\beta )}{(\alpha -\beta )}.\) \(\square \)
Lemma 11.4
For \(g(\alpha )\in H^1[-\pi ,\pi ]\), \(G(\alpha ,\beta )\in C^0([-2\delta ,2\delta ]\times [-\pi ,\pi ])\), we have
Proof
We have
\(\square \)
Lemma 11.5
For \(g(\alpha )\in H^k(\mathbb {T})\), \(G(\alpha ,\beta )\in C^1([-2\delta ,2\delta ]\times \mathbb {T})\cap C^k([-2\delta ,2\delta ]\times \mathbb {T})\), for \(k\ge 0\), we have
Proof
From Lemma 11.2, when \(k=0\), we have the \(L^2\) norm. Moreover, when \(k\ge 1\), we have
For \(j\le k-1\), we could use Lemma 11.2 to get the estimate. For \(j= k\), we could use Lemma 11.4 to get the estimate. \(\square \)
Lemma 11.6
For \(k\ge 2\), \(g(\alpha )\in H^{k}(\mathbb {T})\), \(G(\alpha ,\beta )\in C^k([-2\delta ,2\delta ]\times \mathbb {T})\), we have
Proof
We have
Then for \(j\le k-1\). we could use Lemma 11.2 to get the estimate. Then for \(j= k\). we could use Lemma 11.4 to get the estimate. \(\square \)
Lemma 11.7
For \(g(\alpha )\in H^3(\mathbb {T})\), \(h(\alpha )\in H^3(\mathbb {T})\), \(G(\alpha ,\beta )\in C^3([-2\delta ,2\delta ]\times \mathbb {T})\), we have
Proof
We take the derivative and have
If \(j_2\le 1\), \(j_3\le 1\), then
If \(j_2=3\), then \(j_1=j_3=0\), by Lemma 11.3, we have
If \(j_2=2\), then \(j_1=1\) or \(j_3=1\), by Lemma 11.4, we have
When \(j_3=3\) or \(j_3=2\), it can treated similarly as \(j_2=3\) and \(j_2=2\). \(\square \)
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Shi, J. Regularity of Solutions to the Muskat Equation. Arch Rational Mech Anal 247, 36 (2023). https://doi.org/10.1007/s00205-023-01862-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00205-023-01862-z