
Abstract
The planar N-centre problem describes the motion of a particle moving in the plane under the action of the force fields of N fixed attractive centres:
In this paper we prove symbolic dynamics at slightly negative energy for an N-centre problem where the potentials \(V_j\) are positive, anisotropic and homogeneous of degree \(-\alpha _j\):
The proof is based on a broken geodesics argument and trajectories are extremals of the Maupertuis’ functional. Compared with the classical N-centre problem with Kepler potentials, a major difficulty arises from the lack of a regularization of the singularities. We will consider both the collisional dynamics and the non collision one. Symbols describe geometric and topological features of the associated trajectory.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction and main results
The aim of this paper is to describe the onset of chaos in the case of an N-centre problem involving anisotropic attractive Kepler-like potentials. Anisotropic homogeneous singular potentials arise in the reduction by symmetry of the symmetric N-body problem of Celestial Mechanics, example, in the isosceles 3-body problem. Another relevant physical example occurs in the atomic theory of semiconductor crystals of silicon or germanium, due to the presence of impurities. An additional nuclear charge in the donor impurity causes a deformation that breaks the symmetry of the atoms lattice, ultimately resulting in an anisotropy of the mass tensor; this anisotropy can be referred to the potential as well [29, Chap. 11]. The case of one anisotropic attractive centre has been extensively explored in the Celestial Mechanics literature and in other physical systems, also in the search for connections between classical and quantum mechanics. As Gutzwiller highlighted in a series of pioneering papers ( [26,27,28]), compared to the isotropic Kepler problem, the anisotropic case may lose its integrability and present chaotic trajectories. Moreover, collisions cease to be regularizable, as highlighted by Devaney in [22]. Because of their homogeneity, \(-\alpha \)-anisotropic potentials and their collision trajectories have been extensively studied in the literature [2,3,4,5,6,7, 21, 23, 24, 36, 38] by analytical and geometrical methods. While the problem of N-centres with isotropic Keplerian potentials is a great classic in the recent literature of Celestial Mechanics (cf. the end of this section), as far as we know this is the first work dealing with the case of anisotropic potentials.
We consider an anisotropic planar N-centre problem, where we associate with each centre a positive, anisotropic potential \(V_j\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{0\})\), homogeneous of degree \(-\alpha _j\):
Here \((r,\theta )\) are polar coordinates and \(U_j{\mathop {=}\limits ^{.}}V_j|_{{\mathbb {S}}^{1}}\). Denoting by \(c_1,\ldots ,c_N\in {{\mathbb {R}}}^2\) the positions of the \(N\geqq 2\) centres, we introduce the total potential
so that the equation of motion reads as
there \(x=x(t)\) represents the position of the moving particle at time \(t\in {{\mathbb {R}}}\). The associated Hamiltonian being
every solution of (1) verifies the energy conservation law
Given \(h>0\), we are interested in those solutions of equation (1) which are confined in the 3-dimensional negative energy shell
which projects on the configuration space onto the bounded Hill’s region
We are going to investigate the presence of chaotic behaviour at negative energies, through the detection of a subsystem displaying a symbolic dynamics. In order to give rigour to these concepts, we need to recall some basic definitions. Consider a finite set \({\mathcal {S}}\), with at least two elements, endowed with the discrete metric (\(\rho (s_j,s_k)=\delta _{jk}\), where \(\delta _{jk}\) is the Kronecker delta and \(s_j,s_k\in {\mathcal {S}}\)). Consider the set of bi-infinite sequences of elements of \({\mathcal {S}}\)
and make it a metric space with the distance
defined for every \((s_m),(t_m)\in {\mathcal {S}}^{{\mathbb {Z}}}\). Introduce also the Bernoulli right shift as the discrete dynamical system \(({\mathcal {S}}^{{\mathbb {Z}}},T_r)\), where
The main features of the discrete dynamical system \(({\mathcal {S}}^{{\mathbb {Z}}},T_r)\) are paradigmatic of a chaotic behaviour (see for instance [41]):
-
\(({\mathcal {S}}^{{\mathbb {Z}}},T_r)\) has a dense countable set of periodic points (all the periodic sequences are periodic points);
-
\(({\mathcal {S}}^{{\mathbb {Z}}},T_r)\) displays high sensitivity with respect initial data, that is, if we define as \(T_r^k\) the k-th iteration of the Bernoulli shift, we have that for any \(\varrho >0\) there exist two arbitrarily close sequences \((s_m),(t_m)\in {\mathcal {S}}^{{\mathbb {Z}}}\) such that
$$\begin{aligned} \sup \limits _{k\in {{\mathbb {Z}}}}d(T_r^k((s_m)),T_r^k((t_m)))\geqq \varrho ; \end{aligned}$$ -
the previous property actually holds for a big set of initial data, therefore the dynamical system \(({\mathcal {S}}^{{\mathbb {Z}}},T_r)\) has positive topological entropy.
The Bernoulli shift is our reference dynamical system in order to describe complex behaviour of solutions to the anisotropic N-centre problem.
Definition 1.1
Let \({\mathcal {S}}\) be a finite set, \({\mathcal {E}}\) be a metric space and \({\mathfrak {R}}:{\mathcal {E}}\rightarrow {\mathcal {E}}\) be a continuous map. Then, we say that the dynamical system \(({\mathcal {E}},{\mathfrak {R}})\) has a symbolic dynamics with set of symbols \({\mathcal {S}}\) if there exist a subset \(\Pi \subseteq {\mathcal {E}}\) which is invariant through \({\mathfrak {R}}\) and a continuous and surjective map \(\pi :\Pi \rightarrow {\mathcal {S}}^{{\mathbb {Z}}}\) such that the diagram

commutes. In other words, we are saying that the map \({\mathfrak {R}}|_{\Pi }\) is topologically semi-conjugate to the Bernoulli right shift \(T_r\) in the metric space \(({\mathcal {S}}^{{\mathbb {Z}}},d)\).
In addition to identifying the presence of a symbolic dynamic through semi-conjugation with the Bernoulli shift, we are very interested in giving a physical interpretation to the symbols, in terms of the geometric characteristics of the solutions. To both ends, we need to go further into the analysis of the elements of our system. At first, without loss of generality, we can assume that
Clearly, the smallest degree of homogeneity \(\alpha _1\) leads the overall potential at infinity. Hence, assuming that \(\alpha _1=\alpha _2=\ldots =\alpha _k\) for some \(1\leqq k<N\), and denoting \(\alpha {\mathop {=}\limits ^{.}}\alpha _1\), it is convenient to gather all the \(-\alpha \)-homogeneous potentials in this way:
where
so that \(W\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_k\})\). We set
so that \(W(x)\simeq |x|^{-\alpha }U\left( \frac{x}{|x|}\right) \) when \(|x|>>1\).
Any critical point of the potential U will be termed a central configuration. Our basic assumption on V is about the number of its non-degenerate minimal central configurations:

Remark 1.2
From now on, without loss of generality, we will assume that \(\max \limits _j|c_j|\leqq 1\) and we define
so that, for every \(x\in {{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\}\), we have
Define \( {\tilde{h}}{\mathop {=}\limits ^{.}}{\mathfrak {m}}/{2^\alpha } \): then, for every \(h\in (0,{\tilde{h}})\), the Hill’s region \({\mathcal {R}}_h\) contains the unit ball where the centres lie (see Figure 1).

An example of Hill’s region for the anisotropic N-centre problem that includes a ball of radius greater than 1 (see Remark 1.2)
For the purposes of this work, we need to take into account different definitions of solutions, allowing for collisions (cf. also [14, 16]).
Definition 1.3
We define a non-collision solution of (1) as a \({\mathcal {C}}^2\)-function \(x:J\subseteq {{\mathbb {R}}}\rightarrow {{\mathbb {R}}}^2\) such that \(x(t)\ne c_j\) for every \(t\in J\) and for every \(j=1,\ldots ,N\) and that solves (1) and (2) in the classical sense. We say that x defined on the same interval J is a collision solution of (1) if \(x\in H^1(J)\) and there exists a collision instants set \(T_c(x)\subseteq J\) such that
-
the set \(T_c(x)\) has null measure;
-
for any \(t\in T_c(x)\), it holds \(x(t)=c_j\), for some \(j=1,\ldots ,N\);
-
for any \((a,b)\subseteq J\setminus T_c(x)\), the restriction \(x|_{(a,b)}\) is a non-collision solution of (1);
-
for every \(t\in J\setminus T_c(x)\), x(t) verifies the energy equation (2).
In what follows, an infinite number of periodic solutions of (1) confined in the energy shell \({\mathcal {E}}_h\) will be provided through a variational method and we will relate the occurrence of collisions to the homogeneity degrees of every potential \(V_j\).
Motivated by this, our first main result states the existence of a (possibly collisional) symbolic dynamics in the presence of at least two centres and two minimal non-degenerate central configurations for W.
Theorem 1.4
Assume that \(N\geqq 2\), \(m\geqq 2\) and consider a function \(V\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\})\) defined as in (4) and satisfying (V). There exists \(h^*>0\) and a finite set of symbols \({\mathcal {S}}\) such that, for every \(h\in (0,h^*)\), there exist a subset \(\Pi _h\) of the energy shell \({\mathcal {E}}_h\), a (possibly collisional) first return map \({\mathfrak {R}}:\Pi _h\rightarrow \Pi _h\) and a continuous and surjective map \(\pi :\Pi _h\rightarrow {\mathcal {S}}^{{\mathbb {Z}}}\) such that the diagram

commutes. In other words, for h sufficiently small, the anisotropic N-centre problem at energy \(-h\) admits a symbolic dynamics.
It is worthwhile noticing that the symbols here represent outer arcs shadowing break homothetic trajectories of the potential \(r^{-\alpha }U(\theta )\), indexed on the set
This explains why we need at least two central configurations in Theorem 1.4. Despite the mildness of its assumptions, this theorem does not take into account the problem of collisions with the centres. As we shall use a minimization argument with topological constraints, we need a suitable argument to rule out the occurrence of collisions for topologically constrained minimizers. Following the strategy already introduced in [6, 7] for the anisotropic Kepler problem, this step requires some additional assumption on the homogeneity degrees of every potential \(V_j\) at the centres \(c_j\). As explained later on in Lemma 4.17, there are thresholds \({\bar{\alpha }}_j\in (0,2)\) which depend only on the restricted potentials \(U_j\) and on its non-degenerate central configurations, over which collision-less trajectories can be provided. For this purpose we introduce a further hypothesis on the restrictions \(U_j\) of the \(V_j\)’s to the unit sphere as follows:

Moreover, in order to give a characterization of the symbols naturally related with the collision-less trajectories of (1), we shall adopt the strategy introduced in [39], joining inner and outer arcs through a finite dimensional reduction. To this aim, we need to introduce some further notations. As before, symbols to label the outer arcs are chosen to be the non-degenerate minimal central configurations of the \(-\alpha \)-homogeneous component of V. Next, in order to parametrise the inner arcs, we consider all the possible partitions of the N centres in two disjoint non-empty sets, which are exactly \(2^{N-1}-1\), and we denote the set of such partitions as
Now, being \(\Xi \) defined in (5), we collect all possible choices in the set
Remark 1.5
For \(n\in {{\mathbb {N}}}_{\geqq 1}\) and \((Q_{j_0},\ldots ,Q_{j_{n-1}})\in {\mathcal {Q}}^n\), consider the element \(Q_{j_k}\) for some \(k\in \{0,\ldots ,n-1\}\). It is useful to introduce the quotient and the remainder of the division of \(j_k\) by m in this way:
so that we have \(Q_{j_k}=(P_{l_k},\vartheta _{r_k}^*)\).
Adopting these notations, we can now state the following result on the existence of collision-less periodic solutions of (1) in negative energy shells.
Theorem 1.6
Assume that \(N\geqq 3\) and \(m\geqq 1\) or \(N\geqq 2\) and \(m\geqq 2\). Consider a potential \(V\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\})\) defined as in (4) and satisfying (V)–(\(V_\alpha \)). There exists \({\bar{h}}>0\) such that, for every \(h\in (0,\bar{h})\), \(n\in {{\mathbb {N}}}_{\geqq 1}\) and \((Q_{j_0},\ldots ,Q_{j_{n-1}})\in {\mathcal {Q}}^n\), there exists a periodic collision-less and self-intersections-free solution \(x=x(Q_{j_0},\ldots ,Q_{j_{n-1}};h)\) of (1) satisfying (2), which depends on \((Q_{j_0},\ldots ,Q_{j_{n-1}})\) in this way: there exists \({\bar{R}}=\bar{R}(h)>0\) such that the solution x crosses 2n times the circle \(\partial B_{{\bar{R}}}\) in one period, at times \((t_s)_{s=0}^{2n-1}\), in such a way that, according to (6), for any \(k=0,\ldots ,n-1\), we have that
-
in the interval \((t_{2k},t_{2k+1})\) the solution stays outside \(B_{{\bar{R}}}\) and there exists a neighbourhood \({\mathcal {U}}_{r_k}={\mathcal {U}}({\bar{R}} e^{i\vartheta _{r_k}^*})\) on \(\partial B_{\bar{R}}\) such that
$$\begin{aligned} x(t_{2k}),x(t_{2k+1})\in {\mathcal {U}}_{r_k}; \end{aligned}$$ -
in the interval \((t_{2k+1},t_{2k+2})\) the solution stays inside \(B_{{\bar{R}}}\) and separates the centres according to the partition \(P_{l_k}\).

An example of classical periodic solution provided in Theorem 1.6
As a consequence of the existence of collision-less periodic solutions, we are going to show that, assuming (V)–(\(V_\alpha \)), our system has a collision-free symbolic dynamics with set of symbols \({\mathcal {Q}}\). Differently from Theorem 1.4, in this case it is possible to include also the case \(m=1\), provided \(N\geqq 3\), so to have at least 2 elements in \({\mathcal {Q}}\). In facts, as highlighted in Theorem 1.8, we can cover also the case \(m=1\) and \(N=2\).
Theorem 1.7
In the same setting of Theorem 1.6, take \(h\in (0,\bar{h})\), with \(\bar{h}>0\) therein defined. Then, there exists a subset \(\Pi _h\) of the energy shell \({\mathcal {E}}_h\), a first return map \({\mathfrak {R}}:\Pi _h\rightarrow \Pi _h\) and a continuous and surjective map \(\pi :\Pi _h\rightarrow {\mathcal {Q}}^{{\mathbb {Z}}}\), such that the diagram

commutes. In other words, for any h sufficiently small, the anisotropic N-centre problem at energy \(-h\) admits a collision-less symbolic dynamics, with sets of symbols \({\mathcal {Q}}\).
The last result of this work concerns a particular case of the 2-centre problem, driven by a potential V defined as in (4). We believe that this case deserves to be highly remarked since, for instance, due to the integrability, no results in this direction can be proven for Keplerian radial potential (see [39]), thus revealing a peculiar property of the anisotropic setting. In particular, in order to complete the treatment of all the possible cases not included in Theorems 1.4–1.7, we will assume that \(N=2\) and \(m=1\). In this situation, the alphabet \({\mathcal {Q}}\) defined above would consist of a unique symbol and no symbolic dynamics could be proven to exist with such notation. For this reason, as a set of symbols, we will take the set \({\mathcal {B}}{\mathop {=}\limits ^{.}}\{c_1,c_2\}\) of the 2 centres.
Theorem 1.8
Assume that \(N=2\), \(m=1\) and consider a function \(V\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{{c_1,c_2}\})\), defined as in (4) and satisfying (V)–(\(V_\alpha \)). There exists \({\tilde{h}}>0\), a set of two symbols \({\mathcal {B}}\) such that, for every \(h\in (0,{\tilde{h}})\), there exist a subset \(\Pi _h\) of the energy shell \({\mathcal {E}}_h\), a first return map \({\mathfrak {R}}:\Pi _h\rightarrow \Pi _h\) and a continuous and surjective map \(\pi :\Pi _h\rightarrow {\mathcal {B}}^{{\mathbb {Z}}}\), such that the diagram

commutes. In other words, for any h sufficiently small, the anisotropic 2-centre problem at energy \(-h\) admits a collision-less symbolic dynamics, with set of symbols \({\mathcal {B}}\).
As a consequence of our main results, the anisotropic N-centre problem has positive topological entropy in slightly negative energy shells (see [31, Proposition 3.1.6]). Although the symbolic dynamics contrast with the idea of a phase space fully foliated by invariant tori, generally speaking, its presence alone is not enough to deduce the analytical non-integrability of the system (see [34]). To give an idea of the subtle implications between the non-integrability and positive topological entropy, we refer to [12] where the authors provided an example of geodesic flow on a manifold, which has positive topological entropy, admits \({\mathcal {C}}^\infty \) integrals, but it is not real-analytic integrable. Moreover, let us put our results in a context and compare them with the known case of the N-centres problem with Kepler potentials. Non analytical integrability and chaotic behaviour at non negative (possibly large positive) energies have been proved by variational methods starting from [8,9,10, 32, 33, 35]. We also observe that in [34] the authors proved that, over a high energy threshold, the N-centre problem is completely integrable through \({\mathcal {C}}^\infty \)-integrals both in \({{\mathbb {R}}}^2\) and \({{\mathbb {R}}}^3\). Compared to ours, the isotropic case at non negative energy is considerably simpler, since the Hill’s regions have no boundary. Moreover, the singularities are no longer regularizable, further hampering the compactification of the problem. The negative energy case of the N-centres with Keplerian potentials has been tackled in [11, 25] as a perturbation of the 2-centre problem, and in [39] in full generality in the planar case and displays symbolic dynamics as well. We conclude this discussion on the N-centre problem observing that it is also possible to find T-periodic, parabolic and heteroclinic solutions without any information on the energy of the system. Recent interesting contributions in this direction can be find in [13, 15, 19, 20, 42] and in [18] for anisotropic potentials. It has to be noticed that an additional difficulty specific of the anisotropic case is that the singularities can not be regularized.
1.1 Outline of the proof
The key idea is to consider a different N-centre problem starting from the dynamical system (1) and the energy equation (2). Defining a suitable rescaled version of potential V, we end up with the problem
where \(\varepsilon =h^{1/\alpha }>0\) and \(V^\varepsilon \) takes into account the rescaled centres \(c_j'=\varepsilon c_j\). In this way, all the new centres are confined in the ball \(B_\varepsilon (0)\) and collapse to the origin as the energy h of the original problem becomes very small, since \(\varepsilon \rightarrow 0^+\) as \(h\rightarrow 0^+\). It turns out that it is equivalent to look for periodic solutions of (1)–(2) and periodic solutions of (7). Moreover, when \(\varepsilon \) becomes very small, outside a ball of radius \(R\gg \varepsilon \) and centred in the origin, the potential \(V_\varepsilon \) is a small perturbation of a suitable anisotropic Kepler-like potential. This fact, which, together with the previous discussion, is the content of Section 2, allows us to split the proof of the main results in two steps: the construction of solution arcs outside and inside the ball \(B_R(0)\).
In Section 3 we prove the existence of pieces of solutions of (7), starting in \(\partial B_R(0)\) and lying outside \(B_R(0)\).
In Section 4 we show how to build solution arcs which start in \(\partial B_R\) and go through the centres without collisions.
In Section 5 we glue together the pieces of solutions obtained in the previous sections, in order to obtain periodic solutions of (7) and thus of (1)–(2).
In Section 6 we use all the previous results to prove that, in all the situations described in Theorems 1.4–1.7–1.8, a symbolic dynamics exists, using suitable alphabets.
2 A useful rescaling
Given \(\varepsilon >0\) and \(y\in {{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\}\), let us introduce the rescaled potential
where
Notice that, with this notations and recalling that we have assumed that \(\max |c_j|\leqq 1\) (see Remark 1.2), the new centres \(\varepsilon c_j\) will be included inside the ball \(B_\varepsilon \).
Proposition 2.1
Let \(V\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\})\) be defined as in (4) and \(x\in {\mathcal {C}}^2((a,b);{{\mathbb {R}}}^2)\) be a classical solution of
Then, in the interval \((h^{\frac{\alpha +2}{2\alpha }}a,h^{\frac{\alpha +2}{2\alpha }}b)\), the function
solves the problem
where \(\varepsilon =h^{1/\alpha }\) and \(V^\varepsilon \) is defined as in (8).
Conversely, if \(y\in {\mathcal {C}}^2((c,d);{{\mathbb {R}}}^2)\) is a solution of (10) then, taking \(h=\varepsilon ^\alpha \), the function
is a solution of (9) in the interval \((h^{-\frac{\alpha +2}{2\alpha }}c,h^{-\frac{\alpha +2}{2\alpha }}d)\).
Proof
It is an easy computation based on the homogeneity of the potentials involved. \(\square \)
In the rest of this section we show that, outside a ball of radius \(R>\varepsilon >0\), if \(\varepsilon \) is sufficiently small problem (10) can be seen as a perturbation of a Kepler problem, driven by a sum of \(-\alpha \)-homogeneous potentials. We start by showing a limiting behaviour for \(V^\varepsilon \) as \(\varepsilon \rightarrow 0^+\).
Proposition 2.2
Let \(\delta >0\) and \(V^\varepsilon \) be defined as in (8). Then, there exists \(\gamma >0\) such that, for every \(y\in {{\mathbb {R}}}^2\setminus B_\delta \)
where \(W^0\) is a \(-\alpha \)-homogeneous potential and, in particular, according to (8)
Moreover, the potential \(V^\varepsilon \) is smooth with respect to \(\varepsilon \) and \(V^\varepsilon \rightarrow W^0\) uniformly as \(\varepsilon \rightarrow 0^+\) on every compact subset of \({{\mathbb {R}}}^2\setminus \{0\}\).
Proof
As a starting point, since \(\varepsilon \rightarrow 0^+\), we can assume \(\delta >\varepsilon \); moreover, if we fix \(j\in \{1,\ldots ,N\}\) and \(|y|>\delta \), for every \(\sigma \in {{\mathbb {R}}}\) we have
In this way, for every \(j\in \{1,\ldots ,N\}\), as \(\varepsilon \rightarrow 0^+\) we can write
so that
where \(\gamma =\min \{1,\alpha _{k+1}-\alpha \}>0\).
To conclude, the uniform convergence on compact subsets of \({{\mathbb {R}}}\setminus \{0\}\) is an easy consequence of the fact that the singularity set reduces to the origin as \(\varepsilon \rightarrow 0^+\).
\(\square \)
Remark 2.3
Observe that the potential \(W^0\) defined in (11) is singular in the origin, while the potential \(W^\varepsilon \) has multiple poles at \(\varepsilon c_1,\ldots ,\varepsilon c_k\). Thus, it turns out that assumption (V) requires that \(W^0\) admits m strictly minimal central configurations, for some \(m>0\). Indeed, potential \(W^0\) is exactly the profile limit of W(x), introduced in (4), as \(|x|>> 1\).
To conclude this section, we notice that the energy bound found in Remark 1.2 for problem (9) corresponds to the following bound on the parameter \(\varepsilon \) for problem (10)
where we recall that \({\mathfrak {m}}=\min \limits _{j=1,\ldots ,N}\min \limits _{{\mathbb {S}}^{1}}V_j |_{{\mathbb {S}}^{1}}\). Naturally, this bound guarantees that the ball \(B_\varepsilon \) containing the rescaled centres is completely included in the Hill’s region of problem (10)
Indeed, following the same computations of Remark 1.2, if \(\varepsilon \in (0,{\tilde{\varepsilon }})\) and \(|y|\leqq \varepsilon \), then
3 Outer dynamics
At this point, the idea is to exploit a perturbation argument suggested by Proposition 2.2 and to build pieces of solutions for (10), which lie far from the centres and that will be referred as outer arcs. Note that, if \(y:J\rightarrow {{\mathbb {R}}}^2\), with \(J\subseteq {{\mathbb {R}}}\) is a solution of (10), then
for this reason, we need to show that there exists an \(R>0\) such that, for every \(\varepsilon \in (0,{\tilde{\varepsilon }})\),
Following the same approach of the end of the previous section, we have that, for any \(\varepsilon \in (0,{\tilde{\varepsilon }})\),
Hence, choosing
the inclusions (13) hold for any \(\varepsilon \in (0,{\tilde{\varepsilon }})\).
Inspired by Propositions 2.1–2.2, we are going to look for solutions of the \(\varepsilon \)-problem (10) which start in \(\partial B_R(0)\) and travel in \({{\mathbb {R}}}^2\setminus B_R(0)\); note that, in this setting, R will satisfy (14). These solution arcs will be found as perturbed solutions of an anisotropic Kepler problem driven by \(W^0\); given \(p_0,p_1\in \partial B_R(0)\), we are going to look for solutions of the problem
for some \(T>0\) possibly depending on \(\varepsilon \).
3.1 Homothetic solutions for the anisotropic Kepler problem
The core of our perturbation argument consists in focusing on some special trajectories of an anisotropic Kepler problem driven by \(W^0\), in order to study the behaviour of the close-by orbits. For this reason, we take \(\varepsilon =0\) and we consider the problem
recalling that \(W^0\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{0\})\) is the \(-\alpha \)-homogeneous potential introduced in (11). Note that, if we introduce polar coordinates \(x=(r\cos \vartheta ,r\sin \vartheta )\), the potential \(W^0\) can be written as
where \(U_i=V_i|_{{\mathbb {S}}^{1}}\) and \(U=\sum \limits _{i=1}^kU_i\). From the energy equation in (16), the boundary of the Hill’s region for this problem is the closed curve parametrized by polar coordinates in this way
Let us now take \(\xi =Re^{i\vartheta _\xi }\) in the interior of \({\mathcal {R}}_0\), that is, such that
We aim to understand when a homothetic solution for (16) starting at \(\xi \) exists, that is, a solution of (16) of the form
where \(\lambda :[0,T_\xi ]\rightarrow {{\mathbb {R}}}^+\) and
for some \(T_\xi >0\). To proceed, we need the following classical definition:
Definition 3.1
In general, a central configuration for \(W^0\) is a critical point of \(W^0\) constrained to a level surface of the inertial moment \(I(x)=\frac{1}{2}|x|^2\). In other words, a central configuration is a vector \(\xi =Re^{i\vartheta _\xi }\) that verifies
where
In this paper, following a common habit, we will both refer to \(\vartheta _\xi \in {\mathbb {S}}^{1}\) and \(\xi \in \partial B_R\) as a central configuration for \(W^0\).
Classical computations then show that a homothetic solution \({\hat{x}}_\xi =\lambda \xi \) for (16) exists if only if \(\xi \in \partial B_R\) is a central configuration for \(W^0\) and \(\lambda \) solves on \([0,T_\xi ]\) the 1-dimensional \(\alpha \)-Kepler problem:
In conclusion, given a central configuration \(\vartheta _\xi \in {\mathbb {S}}^{1}\) for \(W^0\), we can consider the following Cauchy problem
which admits as unique solution the homothetic trajectory \({\hat{x}}_\xi \), that reaches again the position \(\xi \) after a time \(T_\xi >0\), with opposite velocity \(-v_\xi \). We conclude this short section with a characterization of the eigenvalues and eigenvectors of the Hessian matrix of \(W^0\) at a central configuration.
Remark 3.2
For a central configuration \(\xi =Re^{i\vartheta _\xi }\), we define the unit vectors
Then, it turns out that \(s_\xi \) and \(s_\tau \) are the eigenvectors of the Hessian matrix \(\nabla ^2W^0(\xi )\)
which correspond to the eigenvalues
Further details of these computations can be found in [17].
3.2 Shadowing homothetic solutions in the anisotropic Kepler problem
In Proposition 2.2 we have seen that \(V^\varepsilon \) reduces to \(W^0\) as \(\varepsilon \rightarrow 0^+\), together with all the \(\varepsilon \)-centres collapsing to the origin. For this reason, the aim of this paragraph is to provide an intermediate result, that is, to prove the existence of trajectories for problem (16) which start very close to a given homothetic trajectory \({{\hat{x}}}_{\xi }\). In other words, we investigate the existence of a solution for
where \(p_0\) and \(p_1\) are chosen sufficiently close to a central configuration \(\xi =Re^{i\vartheta _\xi }\) for \(W^0\). We will follow the same strategy proposed in [39], with the difference that in our context the argument does not work on the whole sphere \(\partial B_R\) because of the anisotropy of \(W^0\). For our convenience, we need a characterization of the homothetic trajectory \({\hat{x}}_\xi \), the unique solution of the Cauchy problem (19), in Hamiltonian formalism; hence, we introduce the Hamiltonian function
and we reword (19) as
where
According to this, we restrict the domain of the vector field F to the 3-dimensional energy shell
and we term \({\hat{z}}_\xi \) the homothetic solution in the Hamiltonian formalism, that is, the unique solution of (23) defined on \([0,T_\xi ]\). Introducing the flow associated to the differential equation in (23)
we notice that
where \(\pi _x(z)\) and \(\pi _v(z)\) represent the two canonic projections of z.
Remark 3.3
In the following we will work with the differential of the flow \(\Phi \) with respect to the spatial variable z. In general it is not possible to give an explicit expression of the Jacobian matrix of \(\Phi \) with respect to z, but it is well known (see for instance [30, 41]) that such Jacobian matrix satisfies the so called Variational Equation. In particular, if \(\gamma _{z_0}(t){\mathop {=}\limits ^{.}}\Phi ^t(z_0)\) is a solution curve from \(z_0\), then
Now, if we introduce the 2-dimensional inertial surface
it turns out that both the starting and ending points of the homothetic motion lie on \(\Sigma \), that is, \({\hat{z}}_\xi (0),{\hat{z}}_\xi (T_\xi )\in \Sigma \). For our purposes, it is useful to provide a characterization of the elements of the tangent bundle of the surface \(\Sigma \). Since \(\Sigma =H^{-1}\cap I^{-1}(R^2/2)\), for a point \((x,v)\in \Sigma \) we deduce that
where \({\mathcal {T}}_{(x,v)}\Sigma \) is the fiber of the tangent bundle \({\mathcal {T}}\Sigma \) at (x, v). In particular, if \(\xi \in \partial B_R\) is a central configuration for \(W^0\), from the constraint equation (17) we get that
Moreover, for the same reason, it is not difficult to observe that the field F is transversal to \(\Sigma \) in \((\xi ,v_\xi )\).
Inspired by this, it is easy to prove the following proposition and thus to define a first return map on \(\Sigma \).
Proposition 3.4
Given \(\xi \in \partial B_R\) central configuration for \(W^0\), there exists a neighbourhood \({\mathcal {U}}\times {\mathcal {V}}\subseteq \Sigma \) of \((\xi ,v_\xi )\) and a function \(T\in {\mathcal {C}}^1({\mathcal {U}}\times {\mathcal {V}};{{\mathbb {R}}}^+)\) such that
-
\(T(\xi ,v_\xi )=T_\xi \);
-
for every \((x,v)\in {\mathcal {U}}\times {\mathcal {V}}\), for \(t>0\) holds
$$\begin{aligned} \Phi ^t(x,v)\in \Sigma \ \text{ if } \text{ and } \text{ only } \text{ if }\ t=T(x,v). \end{aligned}$$
Proof
Let us define the \({\mathcal {C}}^1\) map
Since \(f(T_\xi ,\xi ,v_\xi )=0\) and
the result in the statement easily follows from the Implicit Function Theorem. \(\square \)
From the previous proposition, given \(\xi =Re^{i\vartheta _\xi }\in \partial B_R\) central configuration for \(W^0\) and \({\mathcal {U}},{\mathcal {V}}\) as in Proposition 3.4, the first return map
is well defined. In this way, if we fix \(x_0\in {\mathcal {U}}\), we can define the arriving point \(x_1\) as a function of \(v\in {\mathcal {V}}\) as follows
Our aim is to prove that the previous map is invertible, so that we would be able to build solution arcs starting in a point \(x_0\in \partial B_R\) and arriving in another point \(x_1\in \partial B_R\), with \(x_0,x_1\) sufficiently close to \(\xi \).
Theorem 3.5
Given \(\xi =Re^{i\vartheta _\xi }\) central configuration for \(W^0\) such that \(U''(\vartheta _\xi )\geqq 0\), the map \(x_1\) defined in (25) is invertible in a neighbourhood of \(v_\xi \).
The proof of Theorem 3.5 is rather technical and relies on a series of lemmata which we state and prove below.
Lemma 3.6
In the same setting of Proposition 3.4, the first return map g is \({\mathcal {C}}^1\)-differentiable over \({\mathcal {U}}\times {\mathcal {V}}\) and
for every \(\zeta \in {\mathcal {T}}_{z_\xi }\left( {\mathcal {U}}\times {\mathcal {V}}\right) \), where \({\mathcal {T}}_{z_\xi }\left( {\mathcal {U}}\times {\mathcal {V}}\right) \) is the fibre at \(z_\xi \) of the tangent bundle \({\mathcal {T}}({\mathcal {U}}\times {\mathcal {V}})\).
Proof
First of all, observe that for the \({\mathcal {C}}^1\)-dependence on initial data of the flow \(\Phi ^t\) and for Proposition 3.4, the map g is \({\mathcal {C}}^1\)-differentiable over \({\mathcal {U}}\times {\mathcal {V}}\). Since \(g(z_\xi )=(\xi ,-v_\xi )\), then the differential of g in the point \(z_\xi \in {\mathcal {U}}\times {\mathcal {V}}\) is the linear map
and
Then, the conclusion follows, recalling that \(T(z_\xi )=T_\xi \). \(\square \)
Lemma 3.7
In the same setting of Proposition 3.4, given \(\zeta \in {\mathcal {T}}_{z_\xi }({\mathcal {U}}\times {\mathcal {V}})\) and \(t\in (0,T_\xi )\), define
and consider \(s_\xi ,s_\tau \in {\mathbb {S}}^{1}\) as in Remark 3.2. Then, the projection of q over the direction \(s_\tau \)
solves the linearised problem
recalling that \({\hat{x}}_\xi \) is the unique (homothetic) solution of (19).
Proof
Following Remark 3.3, we know that the partial derivative of \(\Phi \) with respect to z satisfies the variational equation along the homothetic solution \({\hat{x}}_\xi \), which gives us information about how the flow is sensible under variations made on the initial condition \(z(0)=(x(0),{\dot{x}}(0))\). Since the Jacobian matrix of the vector field F in z reads
again by Remark 3.3, the variational equation reads as
for every \(\zeta \in {\mathcal {T}}_{z_\xi }({\mathcal {U}}\times {\mathcal {V}})\). In this way, writing
we see that q(t) must satisfy the problem
Now, we can decompose q in the orthogonal components
and so, by the first equation in (27), we get
Now, since \(s_\tau \) is one of the eigenvectors of the matrix \(\nabla ^2W^0({\hat{x}}_\xi (t))\) (see Remark 3.2) with eigenvalue
the orthogonality of \(s_\xi \) and \(s_\tau \) proves that \(q_\tau \) verifies
and thus problem (27) can be projected along the direction \(s_\tau \) to finally obtain the proof. \(\square \)
Lemma 3.8
Given \(\xi =Re^{i\vartheta _\xi }\) central configuration for \(W^0\) such that \(U''(\vartheta _\xi )\geqq 0\), the Jacobian matrix
is invertible in \((\xi ,v_\xi )\).
Proof
Recalling the definition of the first return map g and its differential in Lemma 3.6, assume by contradiction that there exists \({\overline{\zeta }}=(0,{\overline{w}})\in {\mathcal {T}}_{(\xi ,v_\xi )} ({\mathcal {U}}\times {\mathcal {V}})\), with \({\overline{w}}\ne 0\) such that
In this way, by Lemma 3.6, we have that
At this point, since \(\xi \) and \(v_\xi \) are parallel, by (24) and (29) we deduce that necessarily
This means that, if we define as in Lemma 3.7
then \(q(T_\xi )=0\) and \(q_\tau (T_\xi )=\langle q(T_\xi ),s_\tau \rangle s_\tau =0\). Now, from Lemma 3.7, we know that the projection \(q_\tau (t)\) solves the Sturm-Liouville problem
Let \(u(t){\mathop {=}\limits ^{.}}|{\hat{x}}_\xi (t)|=\lambda (t)R\), where \(\lambda (t)\) solves the 1-dimensional \(\alpha \)-Kepler problem (18); then u solves
Now, since \(U''(\vartheta _\xi )\geqq 0\), we have that
and therefore, by the Sturm comparison theorem referred to (30) and (31), we have that there exists \({\overline{T}}\in (0,T_\xi )\) such that \(u({\overline{T}})=0\). This is finally a contradiction and concludes the proof, since \(|{\hat{x}}_\xi (t)|\) can not be null in the interval \([0,T_\xi ]\). \(\square \)
At this point the proof of Theorem 3.5 follows from Lemma 3.8.
Proof (Proof of Theorem 3.5)
It is enough to observe that
which is invertible for Lemma 3.8. \(\square \)
Now, we are ready to prove the main result of this section, which concerns the existence of outer arcs for the anisotropic Kepler problem.
Theorem 3.9
Given \(\xi =Re^{i\vartheta _\xi }\) central configuration for \(W^0\) such that \(U''(\vartheta _\xi )\geqq 0\), there exists a neighbourhood \({\mathcal {U}}_\xi \) of \(\xi \) on \(\partial B_{R}\) such that, for any \(p_0,p_1 \in {\mathcal {U}}_\xi \) there exist \({\overline{T}}>0\) and a unique solution \(x=x(t)\) of
Moreover, x depends on a \({\mathcal {C}}^1\)-manner on the endpoints \(p_0,p_1\).
Proof
Define the shooting map
where the sets \({\mathcal {U}}\) and \({\mathcal {V}}\) are respectively the neighbourhoods of \(\xi \) and \(v_\xi \) found in Proposition 3.4, \(T:{\mathcal {U}}\times {\mathcal {V}}\rightarrow {{\mathbb {R}}}^+\) is the \({\mathcal {C}}^1\) first return map defined in the same proposition and \(x(\cdot ;p_0,v_0)\) is the unique solution of the Cauchy problem
in the time interval \([0,T(p_0,v_0)]\). Note that, following the notations of Lemma 3.8, we have
The map \(\Psi \) is \({\mathcal {C}}^1\) in its domain both for the \({\mathcal {C}}^1\)-dependence of the solutions of the Cauchy problem (32) on initial data and time and for the differentiability of the first return map T (see Proposition 3.4). Moreover, we have that
and
which is invertible thanks to Lemma 3.8. Therefore, by the Implicit Function Theorem, we have that there exist a neighbourhood \({\mathcal {V}}'\subseteq {\mathcal {V}}\) of \(v_\xi \), a neighbourhood \({\mathcal {U}}_\xi \subseteq {\mathcal {U}}\) of \(\xi \) and a unique \({\mathcal {C}}^1\) function \(\eta :{\mathcal {U}}_\xi \times {\mathcal {U}}_\xi \rightarrow {\mathcal {V}}'\) such that \(\eta (\xi ,\xi )=v_\xi \) and
This actually means that, if we fix \((p_0,p_1)\in {\mathcal {U}}_\xi \times {\mathcal {U}}_\xi \), we can find a solution x of (32), defined in the time interval \([0,{\overline{T}}]\), with \(v_0=\eta (p_0,p_1)\) and \({\overline{T}}=T(p_0,\eta (p_0,p_1))=T(p_0,v_0)\). Furthermore, note that this solution has constant energy \(-1\), since
The \({\mathcal {C}}^1\)-dependence on initial data is a straightforward consequence of the Implicit Function Theorem. \(\square \)
3.3 Outer solution arcs for the N-centre problem
We conclude this section with the proof of the existence of an outer solution arc for the anisotropic N-centre problem driven by \(V^\varepsilon \). As a starting point, we recall that, by Proposition 2.2, if \(|y|>R>0\), then
for a suitable \(\gamma >0\). This suggests to repeat the proof of Theorem 3.9, this time taking into account the perturbation induced by the presence of the centres. Before we start with the proof, it is useful to recall the set of strictly minimal central configurations of \(W^0\), defined as
Note that, as it is clear from the assumptions of Theorem 3.9, it would be enough to require the (not necessarily strict) minimality of the above central configurations. Beside that, the non-degeneration of such critical points will be a fundamental requirement on Section 5 and however we decide to keep it since it is a natural assumption in anisotropic settings (see for instance [2, 6, 7]).
Theorem 3.10
Assume that \(N\geqq 1\) and \(m\geqq 1\) and consider a function \(V\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\})\) defined as in (4) and satisfying assumptions (V). Fix \(R>0\) as in (14) and, for \(0<\varepsilon <R\) consider the potential \(V^\varepsilon \) defined in (8). Then, there exists \(\varepsilon _{ext}>0\) such that, for any \(\vartheta ^*\in \Xi \) minimal non-degenerate central configuration for \(W^0\), defining \(\xi ^*{\mathop {=}\limits ^{.}}Re^{i\vartheta ^*}\), there exists a neighbourhood \({\mathcal {U}}_{ext}(\xi ^*)\) of \(\xi ^*\) on \(\partial B_R\) with the following property:
for every \(\varepsilon \in (0,\varepsilon _{ext})\), for any pair of endpoints \(p_0,p_1\in {\mathcal {U}}_{ext}(\xi ^*)\), there exist \(T_{ext}=T_{ext}(p_0,p_1;\varepsilon )>0\) and a unique solution \(y_{ext}(t)=y_{ext}(t;p_0,p_1;\varepsilon )\) of the outer problem
Moreover, the solution depends on a \({\mathcal {C}}^1\)-manner on its endpoints \(p_0\) and \(p_1\).
Proof
The proof goes exactly as the proof of Theorem 3.9, this time introducing the variable \(\varepsilon \in [0,{\tilde{\varepsilon }})\), with \({\tilde{\varepsilon }}\) defined in (12). Therefore, we define the shooting map
where the sets \({\mathcal {U}}\) and \({\mathcal {V}}\) are respectively the neighbourhoods of \(\xi ^*\) and \(v_{\xi ^*}\) as in Proposition 3.4, \(T:{\mathcal {U}}\times {\mathcal {V}}\rightarrow {{\mathbb {R}}}^+\) is the \({\mathcal {C}}^1\) first return map defined in the same proposition and \(y(\cdot ;p_0,v_0;\varepsilon )\) is the unique solution of the Cauchy problem
in the time interval \([0,T(p_0,v_0)]\). In this way, by the Implicit Function theorem, we have that there exist a neighbourhood \({\mathcal {V}}'\subset {\mathcal {V}}\) of \(v_{\xi ^*}\), \(\varepsilon _{ext}\in (0,{\tilde{\varepsilon }})\), a neighbourhood \({\mathcal {U}}_{ext}(\xi ^*)\subset {\mathcal {U}}\) of \(\xi ^*\) and a unique \({\mathcal {C}}^1\) function \(\eta :[0,\varepsilon _{ext})\times {\mathcal {U}}_{ext}(\xi ^*) \times {\mathcal {U}}_{ext}(\xi ^*)\rightarrow {\mathcal {V}}'\) such that \(\eta (0,\xi ^*,\xi ^*)=v_{\xi ^*}\) and
This actually means that, if we fix \(\varepsilon \in [0,\varepsilon _{ext})\) and \((p_0,p_1)\in {\mathcal {U}}_{ext}(\xi ^*)\times {\mathcal {U}}_{ext}(\xi ^*)\), we can find a unique solution \(y_{ext}\) of (15), defined in the time interval \([0,T_{ext}]\), starting with velocity \(v_0=\eta (\varepsilon ,p_0,p_1)\) and such that \(T_{ext}=T(p_0,\eta (\varepsilon ,p_0,p_1))\) in the fashion of Proposition 3.4. Finally, note that this solution has constant energy \(-1\), since
To conclude, the \({\mathcal {C}}^1\)-dependence on the endpoints is a straightforward consequence on the perturbation technique used in the proof. \(\square \)

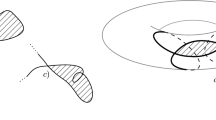
The proof of Theorem 3.10: here \(\partial {\mathcal {R}}\) denotes the boundary of the Hill’s region for the rescaled N-centre problem driven by \(V^\varepsilon \). On the left side we have drawn the homothetic trajectory through \(\xi ^*\): it is a 1-dimensional motion that starts in \(\xi ^*\), it reaches the boundary \(\partial {\mathcal {R}}\) and then it hits again \(\partial B_R\) in \(\xi ^*\). On the right we can see that, if we shoot with initial position sufficiently close to \(\xi ^*\), there will be a first return on the sphere, guaranteed by the transversality of the flow. On the other hand, the dashed trajectory on the right could never reach again the sphere since its starting point is outside the existence neighbourhood provided in the theorem
We conclude this section providing upper and lower bounds for the time interval in which an external solution is defined, that will be useful later in this work.
Lemma 3.11
Let \(\varepsilon \in (0,\varepsilon _{ext})\), let \(\vartheta ^*\in {\mathbb {S}}^{1}\) be a minimal non-degenerate central configuration for \(W^0\) and \({\mathcal {U}}_{ext}(\xi ^*)\) be its neighbourhood on \(\partial B_R\) found in Theorem 3.10. Let \(p_0,p_1\in {\mathcal {U}}_{ext}(\xi ^*)\) and let \(y_{ext}(\cdot ;p_0,p_1;\varepsilon )\) be the unique solution found in Theorem 3.10, defined in its time interval \([0,T_{ext}(p_0,p_1;\varepsilon )]\). Then, there exist \(c,C>0\) such that
Such constants do not depend on the choice of \(p_0,p_1\) inside the neighbourhood.
Proof
The proof is a direct consequence of the continuous dependence of the solution on initial data and of its perturbative nature. \(\square \)
4 Inner dynamics
This section is named Inner dynamics since we will look for solution arcs of the rescaled N-centre problem (7), which bridge any pair of points of \(\partial B_R\) (\(R>>\varepsilon >0\) already chosen in Section 3) and lie inside the ball \(B_R\) along their motion. As far as we are looking for classical solutions with fixed end-points, we need to face the problem of collisions with the centres. Moreover, since we will be working inside \(B_R\), we cannot make use of Proposition 2.2 and thus perturbation techniques do not apply in this case. For this reason, following [39], we opt for a variational approach and our inner solution arcs will be (reparametrizations of) minimizers of a suitable geometric functional. We briefly recall that, in the non-collisional case (see Theorem 1.7 in the Introduction), partitions play a fundamental role in the alphabet of symbolic dynamics. Keeping this in mind, we will define a suitable topological constraint that forces every inner arc to separate the centres according to a prescribed partition. To be clear, the main result of this section is to prove that, for \(\varepsilon >0\) sufficiently small and for any \(p_1,p_2\in \partial B_R\), there exists a solution \(y(\cdot ;p_1,p_2;\varepsilon )\) of the problem
for some \(T>0\), possibly depending on \(\varepsilon \), and such that the trajectory y separates the centres according to a chosen partition.
4.1 Functional setting and variational principles
We build our variational setting referring to the starting equations (1)–(2) and thus we take into account again the potential V and the energy \(-h<0\) is fixed. However, we notice that a scaling on the centres, and thus on the whole problem, does not affect the following discussion. We fix \(p_1,p_2\) inside the open Hill’s region \(\mathring{{\mathcal {R}}}_h\) (see (3)) and we define
that is, all the \(H^1\)-paths that join \(p_1,p_2\) and do not collapse on the centres, and also the \(H^1\)-collision paths
We also introduce the set
and it is easy to check that H is the closure of \({\hat{H}}\) with respect to the weak topology of \(H^1([a,b];{{\mathbb {R}}}^2)\). Let us define the Maupertuis’ functional as
which is differentiable over the non-collision paths space \({\hat{H}}\). The next classical result, known as the Maupertuis’ principle, establishes a link between classical solutions of the equation \(\ddot{x}=\nabla V(x)\) at energy \(-h\) and critical points at a positive level of \({\mathcal {M}}_h\) in the space \({\hat{H}}\). Note that, if \({\mathcal {M}}_h(u)>0\) for some \(u\in H\), then we can define the positive quantity
which plays an important role in the next classical result (see [1, Theorem 4.1]).
Theorem 4.1
(The Maupertuis’ principle) Let \(u\in {\hat{H}}_{p_1,p_2}([a,b])\) be a critical point of \({\mathcal {M}}_h\) at a positive level and let \(\omega >0\) be defined by (34). Then, \(x(t){\mathop {=}\limits ^{.}}u(\omega t)\) is a classical solution of the fixed-end problem
while u itself is a classical solution of
The converse holds also true, that is, if x is a classical solution of the fixed-end problem above in a certain interval \([a',b']\), then, setting \(\omega =1/(a'-b')\), \(u(t)=x(t/\omega )\) is a critical point of \({\mathcal {M}}_h([a,b];\cdot )\) at a positive level, for some suitable values a, b.
In order to apply direct methods of the Calculus of Variations to \({\mathcal {M}}_h\) we will work in H, which is weakly closed in \(H^1\). As a first step we recall a standard result that shows that a (possibly colliding) minimizer of \({\mathcal {M}}_h\) in H preserves the energy almost everywhere.
Lemma 4.2
If \(u\in H\) is a minimizer of \({\mathcal {M}}_h\) at a positive level, then
The lack of additivity of \({\mathcal {M}}_h\) induces the introduction of the Jacobi-length functional
whose domain is the weak \(H^1\)-closure of the set
Indeed, Theorem 4.1 could be rephrased for \({\mathcal {L}}_h\) and thus classical solutions will be suitable reparametrizations of critical points of \({\mathcal {L}}_h\) (see for instance [37] and Appendix 7 for more precise details on this functional). Finally, we recall that the Jacobi-length functional, being a length, is additive and it is also invariant under reparametrizations. Despite that, exploiting the correspondence which stands between minimizers of \({\mathcal {M}}_h\) and minimizers of the Jacobi-length functional (see Proposition A.3), an easy proof leads to the following proposition.
Proposition 4.3
Let u be a minimizer of \({\mathcal {M}}_h([a,b];\cdot )\) in \(H_{p_1,p_2}([a,b])\). Then, for any subinterval \([c,d]\subseteq [a,b]\), the restriction \(u|_{[c,d]}\) is a minimizer of \({\mathcal {M}}_h([c,d];\cdot )\) in the space \(H_{u(c),u(d)}([c,d])\).
4.2 Minimizing through direct methods
At this point, we go back to the \(\varepsilon \) N-centre problem (33), introducing the notation \(c_j'{\mathop {=}\limits ^{.}}\varepsilon c_j\) for the \(\varepsilon \)-centres included in \(B_\varepsilon \). We aim to prove the existence of a minimizer for the Maupertuis’ functional, requiring the following topological constraint: an inner arc has to cross the ball \(B_\varepsilon \), dividing the centres into two non-trivial subsets. Following [39], this can be done introducing the winding number with respect to every centre; but since a path in \({\hat{H}}\) is not necessarily closed, we need to close it artificially. Let us fix \([a,b]\subseteq {{\mathbb {R}}}\), \(p_1,p_2\in \partial B_R\) and write
for \(\vartheta _1,\vartheta _2\in [0,2\pi )\). For \(u\in {\hat{H}}_{p_1,p_2}([a,b])\), if \(p_1\ne p_2\) we close u glueing an arc of \(\partial B_R\) in counter-clockwise direction, that is, we define
and so, we can introduce the winding number of u with respect to a centre \(c_j'\) as
Since a path u has to separate the centres with respect to a given partition in two non-trivial subsets, we can choose the parity of the winding numbers \(\text{ Ind }(u;c_j)\) as a dichotomy property. Following this, we introduce the set of admissible winding vectors
and, for \(l\in {\mathfrak {I}}^N\) (which we fix from now on), we consider the class of paths
Of course, the above set is not closed with respect to the weak topology of \(H^1\) and so, as before, we include the collision paths in our minimization set. For \(j\in \{1,\ldots ,N\}\) define the set
that is, the collision paths behaving like a path in \({\hat{H}}_l\) with respect to every centre, except for \(c_j'\) in which the particle collides. In the same way, we can include two collision centres \(c_{j_1}',c_{j_2}'\) defining
and so on
At this point, we can collect together all the admissible collision paths with respect to a fixed winding vector \(l\in {\mathfrak {I}}^N\) in the set
and give the following result (the proof goes exactly as in [39]):
Proposition 4.4
The set
is weakly closed in \(H^1\).
Finally, we look for solution arcs which lie inside \(B_R\) along their trajectory, and so it makes sense to add another constraint on them. For this reason we will restrict our investigation to the sets
The next proposition guarantees that we are in the convenient setting to perform a variational argument and follows from the fact that \(K_l\) is stable under uniform convergence.
Proposition 4.5
The set \(K_l\) is weakly closed in \(H^1\).
For any \(u\in K_l=K_l^{p_1,p_2}([0,1])\), we take into account the Maupertuis’ functional
and we remark two facts:
-
since \({\mathcal {M}}\) is invariant under time re-parametrizations, we have put \(a=0\) and \(b=1\);
-
actually, \({\mathcal {M}}={\mathcal {M}}_1^\varepsilon \), but we have omitted this dependence since we will mainly work with both \(\varepsilon >0\) and the energy fixed. When we will move such \(\varepsilon \) or the energy, we will use the more explicit notations.
The next lemma provides a lower bound on the Maupertuis’ functional and it is crucial in order to apply direct methods.
Lemma 4.6
There exists \(C>0\) such that
Proof
Since \(u\in K_l\) then \(|u(t)|\leqq R\) for every \(t\in [0,1]\) and so
for every \(j=1,\ldots ,N\) and for every \(t\in [0,1]\). Now, recalling that
we have that
for every \(t\in [0,1]\). Recalling (12) and (14), we have that \(R\in (\varepsilon ,{\mathfrak {m}}^{1/\alpha }-\varepsilon )\) for every \(\varepsilon \), hence
In this way, we have shown that there exists \(C>0\) such that
for every \(u\in K_l\). At this point, let us define \(t^*\in (0,1)\) as the first instant at which u crosses \(B_\varepsilon \). Using the Hölder inequality, we note that
and the proof is concluded. \(\square \)
The next result, which claims the existence of a minimizer for the Maupertuis’ functional in the set \(K_l\), makes use of the direct method of Calculus of Variations. We take for granted the coercivity and the weakly lower semi-continuity of \({\mathcal {M}}\), since they are based on classical results of Functional Analysis.
Proposition 4.7
Assume that \(N\geqq 2\) and consider a function \(V\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\})\) defined as in (4). Fix \(\varepsilon \in (0,{{\tilde{\varepsilon }}})\) as in (12) and consider the potential \(V^\varepsilon \) defined in (8). Fix \(R\in ({\tilde{\varepsilon }},{\mathfrak {m}}^{1/\alpha }-{\tilde{\varepsilon }})\) as in (14) and fix \(l\in {\mathfrak {I}}^N\). Then, for any \(p_1,p_2\in \partial B_R\), the Maupertuis’ functional
admits a minimizer \(u\in K_l^{p_1,p_2}([0,1])\) at a positive level.
Now, if we show that the minimizer \(u\in K_l\) verifies:
-
(CF) u is collision-free;
-
(R) \(|u(t)|<R\) for every \(t\in (0,1)\).
we have that
so that Theorem 4.1 applies and we can find a classical solution \(y:[0,T]\rightarrow {{\mathbb {R}}}^2\) of the inner problem (33). The next two sections are devoted to show respectively that u joins the properties (CF) and (R), to finally obtain a classical solution arc for the anisotropic N-centre problem inside. As a starting point, we characterize the sets of colliding instants and of the times at which \(|u|=R\). In particular, if we define
we can easily notice that, since \({\mathcal {M}}(u)<+\infty \), \(T_c(u)\) is a closed set of null measure and its complement \([0,1]\setminus T_c(u)\) is a union of a countable or finite number of open intervals. Moreover, when the minimizer travels along a connected component of \([0,1]\setminus ( T_c(u)\cup T_R(u))\), it can be reparametrized to obtain a classical solution of the N-centre problem through Theorem 4.1 and the energy is conserved along this path. This is shown in the next lemma.
Lemma 4.8
Given a minimizer \(u\in K_l\) of the Maupertuis’ functional \({\mathcal {M}}\):
-
(i)
u verifies
$$\begin{aligned} \frac{1}{2}|{\dot{u}}(t)|^2-V^\varepsilon (u(t))=-\frac{1}{\omega ^2}\quad \text{ almost } \text{ everywhere } \text{ in }\ [0,1]; \end{aligned}$$ -
(ii)
if (a, b) is a connected component of \([0,1]\setminus ( T_c(u)\cup T_R(u))\) then \(u|_{(a,b)}\in {\mathcal {C}}^2(a,b)\) and
$$\begin{aligned} \omega ^2 \ddot{u}(t)=\nabla V^\varepsilon (u(t))\quad \text{ for } \text{ every }\ t\in (a,b). \end{aligned}$$
Proof
The proof is a consequence of the minimality of u with respect to compact support variations in \([0,1]\setminus (T_c(u)\cup T_R(u))\) (see the proof of Theorem 4.1 and Lemma 4.2). \(\square \)
4.3 Qualitative properties of minimizers: absence of collisions and (self-)intersections
In what follows we are going to provide the absence of collisions (CF) for a minimizer u obtained in the previous sections. In order to do that, we will carry out a local study near-collisions. Since we will be working close to the centres, the radius of the ball \(B_\varepsilon \) will play no role here and thus we fix \(\varepsilon >0\). Fix an admissible partition of the centres, that corresponds to fix \(l\in {\mathfrak {I}}^N\) and consider a minimizer \(u\in K_l\) (see (35) and (36) for their definitions). To start with, we show that the collisions are isolated. Recalling the definition of \(T_c(u)\) in (37), this is the content of the next lemma that, moreover, provides a Lagrange-Jacobi identity for colliding arcs. The proof is based on a Lagrange-Jacobi-like inequality (see [2] for anisotropic potentials) and it is rather classical, so it will be omitted.
Lemma 4.9
The set \(T_c(u)\) is discrete and it has a finite number of elements. In particular, if the minimizer u has a collision with the centre \(c_j'\), the function \(I(t){\mathop {=}\limits ^{.}}|u(t)-c_j'|^2\) is strictly convex in a neighbourhood of the colliding instant.
In the next two propositions we discuss some important properties of minimizers of \({\mathcal {M}}\), concerning the (self-)intersections at points which are different from the centres.
Proposition 4.10
Let \(u\in K_l^{p_1,p_2}\) be a minimizer of \({\mathcal {M}}\). Then, u parametrizes a path without self-intersections at points different from the centres.
Proof
The proof goes exactly as in [39, Proposition 4.24]. \(\square \)
Remark 4.11
In light of the previous proposition, we can affirm that we could start this minimization process choosing among only those paths with winding index equal to 0 or 1 with respect to every centre, even if this choice could seem unnatural at the beginning.
Lemma 4.12
Let \(u\in K_l^{p_1,p_2}\) be a minimizer of \({\mathcal {M}}\), let \(q_1=u(c)\) and \(q_2=u(d)\) for some sub-interval \([c,d]\subseteq [0,1]\). If we define \(K^{q_1,q_2}(u)\) as the weak \(H^1\)-closure of the space
then
Proof
Assume by contradiction that there exists \(w\in K^{q_1,q_2}(u)\) such that
The path
belongs to the space \(K_l^{p_1,p_2}\) and minimizes \({\mathcal {M}}\) in that space. This is in contrast with the minimality of u in the same space. \(\square \)
Proposition 4.13
Let \(u\in K_l^{p_1,p_2}\) be a minimizer of \({\mathcal {M}}\). Let \({\tilde{l}}\in {\mathfrak {I}}^N\), \({\tilde{p}}_1,{\tilde{p}}_2\in \partial B_R\) and \(v\in K_{{{\tilde{l}}}}^{{\tilde{p}}_1,{\tilde{p}}_2}\) be a minimizer of \({\mathcal {M}}\), assuming that the sets \(\{p_1,p_2\}\) and \(\{{\tilde{p}}_1,{\tilde{p}}_2\}\) do not coincide. Then, if u intersects v at least in two distinct points \(q_1,q_2\in B_R\setminus \{c_1',\ldots ,c_N'\}\), the portions of u and v between \(q_1\) and \(q_2\) are not homotopic paths in the punctured ball. As a consequence, if \(l={\tilde{l}}\), then u cannot intersect v more than once.
Proof
Since the Maupertuis’ functional is invariant under time-reparametrizations, to prove the assertion we can assume that there exist \(q_1,q_2\in B_R\setminus \{c_1',\ldots ,c_N'\}\) such that
for some interval \([c,d]\subseteq [0,1]\). Assume by contradiction that the paths \(u|_{[c,d]}\) and \(v|_{[c,d]}\) are homotopic in the punctured ball \(B_R\setminus \{c_1',\ldots ,c_N'\}\); this means in particular that \(K^{q_1,q_2}(u)=K^{q_1,q_2}(v)\) (for their definitions see the statement of Lemma 4.12). Now, again from Lemma 4.12, we deduce that
For this reason, if we define the path (see Figure 4)
we clearly have that \({\tilde{u}}\in K_l^{p_1,p_2}\) and
By Lemma 4.9 the instants c and d belong to two connected components of \([0,1]\setminus (T_c(u)\cup T_R(u))\) and therefore Lemma 4.8 applies too. This is finally a contradiction since the path \({\tilde{u}}\) cannot be differentiable in c and d (note that \({\dot{u}}(c)\ne {\dot{v}}(c)\) for the uniqueness of solutions of Cauchy problems; the same holds at d for time-reversibility).
For the case \(l={\tilde{l}}\) the proof is trivial, once provided Proposition 4.10. \(\square \)

Illustration of the case of Proposition 4.13
At this point we are ready to start a local analysis in order to rule out the presence of collisions with the centres. Let us now assume that the minimizer u has a collision with the centre \(c_j'\) at time \(t_0\). By means of Lemma 4.9, we have that there exist \(c,d\in [0,1]\) such that
-
\(c<t_0<d\) and \(t_0\) is the unique instant of collision of u in [c, d];
-
the inertial moment \(I(t)=|u(t)-c_j'|^2\) is strictly convex in [c, d].
We define \(\bar{p}_1=u(c)\) and \(\bar{p}_2=u(d)\). Since \(u\in {\mathcal {C}}([c,d];{{\mathbb {R}}}^2)\), then there exists \(r^*>0\) such that
and, without loss of generality, we can assume that \(\bar{p}_1,\bar{p}_2\in \partial B_r(c_j')\), for some \(r<r^*\).
Since we are getting close to the collision, it makes sense to localize the potential and to write
Notice that inside the ball \(B_r(c_j')\) the quantity \(f^j(y)\) is smooth and bounded.
Let us introduce the space
and its weak \(H^1\)-closure
and restrict the Maupertuis’ functional to \({\mathcal {K}}_l^{\bar{p}_1,\bar{p}_2}\) in this way
We can repeat the proof of Section 4.2 and show that \({\mathcal {M}}_l^{\bar{p}_1,\bar{p}_2}\) admits a minimizer in \({\mathcal {K}}_l^{\bar{p}_1,\bar{p}_2}\) at a positive level. Moreover, from Lemma 4.12, this minimizer is nothing but \(v{\mathop {=}\limits ^{.}}u|_{[c,d]}\).
For the sake of simplicity, assume that \(c_j'=0\).
Proposition 4.14
The following behaviour holds:
for some constant \(C>0\). In particular, when |y| is sufficiently small, the problem is a small perturbation of an anisotropic Kepler problem driven by the \(-\alpha _j\)-homogeneous potential \(V_j\).
Proof
The proof follows the approach of Proposition 2.2. In particular, defining \(r^*>0\) as in (38), for \(r\in (0,r^*)\) and for \(|y|\leqq r\) we can write
with \(G_r\) uniformly bounded with respect to r. \(\square \)
At this point we need a result from [2] on the properties of minimal collision orbits for a perturbed anisotropic Kepler problem. In order to take it into account, we need to introduce some further notations. Let \(r^*\) be as in (38); for \(r\in (0,r^*)\) and \(q\in \partial B_r\) we define the set of \(H^1\)-colliding paths on a generic real interval \([c,d]\subseteq {{\mathbb {R}}}\)
Moreover, for a potential \(V^\varepsilon \in {\mathcal {C}}^2(B_r\setminus \{0\})\) which is a perturbation of an anisotropic potential as in Proposition 4.14, consider the Maupertuis’ functional
for \(w\in H_{coll}^q\). Up to choose a smaller \(r^*\), the authors proved the following result; in order to ease the notation, we will denote a minimal non-degenerate central configuration for \(U_j\) as \(\vartheta ^*\) instead of \(\vartheta _j\) (see V).
Lemma 4.15
([2, Theorem 5.2]) Let \(\vartheta ^*\in {\mathbb {S}}^{1}\) be a minimal non-degenerate central configuration for \(U_j\). There exists \(r^*>0\) and \(\delta >0\) such that, for every \(q=re^{i\vartheta }\) with \(r<r^*\) and \(\vartheta \in (\vartheta ^*-\delta ,\vartheta ^*+\delta )\) there exists a unique minimizer of the Maupertuis’ functional in the set of colliding paths \(H_{coll}^q\). In particular, this path cannot leave the cone emanating from the origin and bounded by the arc-neighbourhood \((\vartheta ^*-\delta ,\vartheta ^*+\delta )\).
The presence of this foliation of minimal arcs in a cone spanned by \(\vartheta _j\), together with Proposition 4.13, suggests to choose one of this paths and to use it as a barrier, in order to determine a region of the ball \(B_r\) in which a minimizer with end-points on \(\partial B_r\) has to be confined. Indeed, in order to rule out the presence of collisions for a minimizer in \({\mathcal {K}}_l^{\bar{p}_1,\bar{p}_2}\), we aim to follow the ideas contained in a result from [6], which holds true for minimizers that do not leave a prescribed angular sector. For a \(r\in (0,r^*)\), a potential \(V^\varepsilon \in {\mathcal {C}}^2(B_r\setminus \{0\})\) as in Proposition 4.14 and \(T>0\), introduce the action functional \({\mathcal {A}}_T:H^1([0,T];{{\mathbb {R}}}^2)\rightarrow {{\mathbb {R}}}\cup \{+\infty \}\) such that
Definition 4.16
We say that \(x\in H^1([0,T];{{\mathbb {R}}}^2)\) is a fixed-time Bolza minimizer associated with the endpoints \(x_1=x(0),x_2=x(T)\), if, for every \(y\in H^1([0,T];{{\mathbb {R}}}^2)\) there holds
As announced, we recall an important result from [6]. Note that Proposition 4.14 guarantees the applicability of Theorem 2 in [6] to problems driven by our family of potentials \(V^\varepsilon \). For this reason, we restate below such result in our setting.
Lemma 4.17
([6, Theorem 2]) Fix \(\varepsilon >0\) and \(r\in (0,r^*)\), with \(r^*>0\) defined in (38). For a minimal non-degenerate central configuration \(\vartheta ^*\in {\mathbb {S}}^{1}\) for \(V_j\), define the set
Then, for every \(\vartheta ^-<\vartheta ^+\in \Theta \) there exists \({\bar{\alpha }}(U_j,\vartheta ^-,\vartheta ^+)\in (0,2)\) such that if \(\alpha _j>{\bar{\alpha }}\) all the fixed-time Bolza minimizers in the angular sector \([\vartheta ^-,\vartheta ^+]\) are collision-less.
As a first step, we show that the previous lemma can be extended for those \(H^1\)-paths with fixed ends which minimize the Maupertuis’ functional instead of the action functional. Note that the previous result holds for every fixed energy. Moreover, with the same proof of Section 4.2, one can prove the existence of a minimizer for the Maupertuis’ functional
in the space of the \(H^1\)-paths which join two points within the sector \([\vartheta ^-,\vartheta ^+]\), for \(h\in {{\mathbb {R}}}\).
Lemma 4.18
In the same setting of Lemma 4.17, if \(h\in {{\mathbb {R}}}\) and if \(\alpha _j>{{\bar{\alpha }}}(U_j,\vartheta ^-,\vartheta ^+)\), then all the minimizers of the Maupertuis’ functional \({\mathcal {M}}_h\) within the sector \([\vartheta ^-,\vartheta ^+]\) are collision-less.
Proof
Assume that \(u\in H^1([0,1];{{\mathbb {R}}}^2)\) minimizes the Maupertuis’ functional in the set of the \(H^1\)-paths which join two points \(q_1,q_2\) within the sector \([\vartheta ^-,\vartheta ^+]\) and assume also that u has a collision with the origin. If we define \(x(t){\mathop {=}\limits ^{.}}u(\omega t)\), with
then, from Theorem 4.1, we know that x solves
At this point we define \(T=1/\omega \) and we find the fixed-time Bolza minimizer of the action functional associated with the sector \([\vartheta ^-,\vartheta ^+]\) and we define
We call this minimizing path
and, by Lemma 4.17, we know that it cannot collide with the origin; this also proves that \(x\ne \bar{x}\).
Now, we know that \(x(t)=u(t/ T)\) for all \(t\in [0,T]\), and so we can compute
and, from the conservation of the energy for u and the definition of \(\omega =1/T\), we can find that (see also Proposition A.3 in Appendix 7)
At this point, since the Maupertuis functional is invariant over time-reparametrizations we have
which is a contradiction since \(\bar{x}\) is collision-less. \(\square \)
In the next result we show that it is possible to improve the previous lemma. In particular, a sequence of minimal paths cannot accumulate to a collision path, thanks to a uniform bound on the distance from the origin.
Lemma 4.19
In the same setting of Lemma 4.17, there exists \({\bar{r}}>0\) such that, for any \(r_0\in (0,{\bar{r}})\), for every \(k\in {{\mathbb {N}}}_{\geqq 1}\), for every sector \([\vartheta ^-,\vartheta ^+]\) such that \(\vartheta ^+-\vartheta ^-=2k\pi \), for every \(\alpha _j>{{\bar{\alpha }}}(U_j,\vartheta ^-,\vartheta ^+)\), there exists \(\delta >0\) such that, for every \(q_1,q_2\in \partial B_{r_0}\) the Maupertuis’ minimizer u considered in Lemma 4.18 from \(q_1\) to \(q_2\) in the sector \([\vartheta ^-,\vartheta ^+]\) is such that
Proof
We argue by contradiction; it is not restrictive to assume instead the following:
-
there exists \(r_n\rightarrow 0^+\) sequence of positive real numbers;
-
fix \(k\in {{\mathbb {N}}}_{\geqq 1}\);
-
fix \(\vartheta ^*\in {\mathbb {S}}^{1}\) minimal non-degenerate central configuration for \(U_j\) (this is not restrictive since \(U_j\) admits just a finite number of them);
-
there exists \(\alpha _j>{{\bar{\alpha }}}(U_j,\vartheta ^*,\vartheta ^*+2k\pi )\);
-
take \(\delta _n\rightarrow 0^+\) sequence of positive real numbers;
-
take two sequences of points \((q_1^n),(q_2^n)\subseteq (\partial B_{r_n})\);
-
consider the sequence of minimizers \((u_n)\) of the Maupertuis’ functional
$$\begin{aligned} {\mathcal {M}}(u_n)=\frac{1}{2}\int _0^1|{\dot{u}}_n|^2\int _0^1(-1+V^\varepsilon (u_n)), \end{aligned}$$every one of them respectively in the space
$$\begin{aligned} H^n{\mathop {=}\limits ^{.}}\{u_n\in H^1([0,1];{{\mathbb {R}}}^2):\,u_n(0)=q_1^n,\ u_n(1)=q_2^n,\ |u_n|\leqq r_n \} \end{aligned}$$and within the sector \([\vartheta ^*,\vartheta ^*+2k\pi ]\),
such that
Define the blow-up sequence
which, for every \(n\in {{\mathbb {N}}}\), verifies the following:
Recalling the behaviour of \(V^\varepsilon \) (see Proposition 4.14), observe that, if we fix \(y\in {{\mathbb {R}}}^2\setminus \{0\}\) we can compute
as \(n\rightarrow +\infty \). In this way we have
and so, if we define
we have shown that
Now, since \(\bar{{\mathcal {M}}}(v_n)\) and \({\mathcal {M}}(u_n)\) are proportional and \(u_n\) minimizes \({\mathcal {M}}\) in \(H^n\), if we define
we easily deduce that
At this point, we want to show that \((v_n)\) admits a weak limit in the \(H^1\) topology. Since \(V_j\) is bounded from below in \({\mathbb {S}}^{1}\) we have that there exists \(C_1>0\)
On the other hand, since \({\mathcal {O}}(r_n^{\alpha _j})\) is uniformly bounded when \(n\rightarrow +\infty \) by a constant \(C_2>0\), we have that there exists \(C_3>0\) such that
Moreover, the sequence \((v_n)\) is uniformly bounded by 1 and so its \(L^2\)-norm is too. For this reason, we deduce that there exists \(v_0\in H^1\) such that \(v_n\rightharpoonup v_0\) in the \(H^1\)-topology and thus uniformly; in particular, from (39) and the uniform convergence we have that
In other words, we have shown that the blow-up limit \(v_0\) is a collision path in the space
in the sector \([\vartheta ^*,\vartheta ^*+2\bar{k}\pi ]\). For this reason, it is enough to show that \(v_0\) minimizes the Maupertuis functional
in the space \({\bar{H}}\); indeed, we would reach a contradiction thanks to Lemma 4.18, since \(\alpha _j>{{\bar{\alpha }}}(U_j,\vartheta ^*,\vartheta ^*+2k\pi )\) and a minimizer cannot have collisions.
From the Fatou’s lemma we have that
on the other hand, since \(v_n\) minimizes \(\bar{{\mathcal {M}}}\) in \(\bar{H}_n\) for every \(n\in {{\mathbb {N}}}\), we have that
for some \(C_4>0\) and for every \(n\in {{\mathbb {N}}}\). In this way, we also have that
and so \(v_n\rightarrow v_0\) strongly in \(H^1\). This shows that \(v_0\) is a minimizer in \({\bar{H}}\) and concludes the proof. \(\square \)
At this point, we want to prove something stronger than the previous lemma, which will involve Lemma 4.15. Indeed, our idea is to show that it is possible to extend Lemma 4.19 to those sectors that are determined by two minimal arcs of the foliation provided in Lemma 4.15. We are interested in those curved sectors which have as barriers one minimal arc and its \(2k\pi \)-copy for some \(k\in {{\mathbb {N}}}_{\geqq 1}\). Note that in [2], the authors give a particular characterization of such foliation: it is possible to parametrize every minimal arc with respect to its distance from the origin, thanks to a monotonicity property of the radial variable (see [2, Lemma 4.3]). Recalling that \(\vartheta ^*\) is a minimal non-degenerate central configuration for \(U_j\), we consider the unique minimal arc \(\gamma ^*\), parametrized as the polar curve \(\gamma ^*(r)=(r,\varphi ^*(r))\), such that \(\varphi ^*(r_0)=\vartheta ^*\). For \(k\in {{\mathbb {N}}}_{\geqq 1}\), we can define
and we are able to prove the following result.
Lemma 4.20
In the same setting of Lemma 4.17, there exists \(r^*>0\) such that, for every \(r_0\in (0,r^*)\), for every \(k\in {{\mathbb {N}}}_{\geqq 1}\), for every \(\alpha _j>{\bar{\alpha }}(U_j,\vartheta ^*,\vartheta ^*+2k\pi )\), there exists \(\delta >0\) such that, for every \(q_1,q_2\in \Sigma (\vartheta ^*,k)\cap \partial B_{r_0}\), the Maupertuis’ minimizer u which connects \(q_1\) and \(q_2\) is such that:
-
(i)
u belongs pointwisely to the sector \(\Sigma (\vartheta ^*,k)\);
-
(ii)
u verifies
$$\begin{aligned} \min \limits _{t\in [0,1]}|u(t)|>\delta r_0. \end{aligned}$$
Proof
We start with the proof of (ii). Following the same technique used in the proof of Lemma 4.19, assume by contradiction that:
-
there exists \(r_n\rightarrow 0^+\) sequence of positive real numbers and, without loss of generality, assume that \(r_n\leqq r^*\) for n sufficiently large, with \(r^*>0\) as in Lemma 4.15;
-
fix \(k\in {{\mathbb {N}}}\);
-
fix \(\vartheta ^*\in {\mathbb {S}}^{1}\) minimal non-degenerate central configuration for \(U_j\) (this is not restrictive since \(U_j\) admits just a finite number of them);
-
there exists \(\alpha _j>{{\bar{\alpha }}}(U_j,\vartheta ^*,\vartheta ^*+2k\pi )\);
-
take \(\delta _n\rightarrow 0^+\) sequence of positive real numbers;
-
define the sequence of curved sectors
$$\begin{aligned} \Sigma _n{\mathop {=}\limits ^{.}}\left\{ (r,\vartheta (r)):\,\varphi ^*(r)\leqq \vartheta (r)\leqq \varphi ^*(r)+2k\pi ,\ \text{ for }\ 0\leqq r\leqq r_n\right\} , \end{aligned}$$where \(\gamma ^*(r)=(r,\varphi ^*(r))\) is the polar curve which parametrizes the unique minimal arc of the foliation provided in Lemma 4.15, such that \(\varphi ^*(r^*)=\vartheta ^*\);
-
take two sequences of points \((q_1^n),(q_2^n)\subseteq (\Sigma _n\cap \partial B_{r_n})\);
-
consider the sequence of minimizers \((u_n)\) of the Maupertuis’ functional
$$\begin{aligned} {\mathcal {M}}(u_n)=\frac{1}{2}\int _0^1|{\dot{u}}_n|^2\int _0^1(-1+V^\varepsilon (u_n)), \end{aligned}$$every one of them respectively in the space
$$\begin{aligned} H^n{\mathop {=}\limits ^{.}}\{u_n\in H^1([0,1];{{\mathbb {R}}}^2):\,u_n(0)=q_1^n,\ u_n(1)=q_2^n,\ |u_n|\leqq r_n \} \end{aligned}$$and within the curved sector \(\Sigma _n\), requiring that every \(u_n\) satisfies
$$\begin{aligned} \min \limits _{t\in [0,1]}|u_n(t)|\leqq \delta _nr_n. \end{aligned}$$
Define the blow-up sequence \((v_n)\) as in the proof of Lemma 4.19, which again verifies (39) for every \(n\in {{\mathbb {N}}}\). In the same way, one can prove that every \(v_n\) (at least for n large) minimizes the functional
in the space
Moreover, defining the angular variable \(\varphi _n^*(r){\mathop {=}\limits ^{.}}\varphi ^*(r_nr)\) and the blow-up sector
one can easily verify that \(v_n\in {\bar{\Sigma }}_n\) for every \(n\in {{\mathbb {N}}}\).
At this point, with the same technique of Lemma 4.19, one can prove that \(v_n\rightarrow v_0\) uniformly in [0, 1], with \(v_0\) minimizer of the functional
in the space
for some \(\bar{q}_1,\bar{q}_2\in \partial B_1\) and such that
Moreover, from Lemma 4.15, since \(r_n\rightarrow 0^+\), we have that the sequence of functions \(\varphi _n^*=\varphi _n^*(r)\) uniformly converges to \(\vartheta ^*\) on the r-interval [0, 1] and so
This means that \(v_0\) minimizes \(\bar{{\mathcal {M}}}\) in \(\bar{H}\) within the sector \([\vartheta ^*,\vartheta ^*+2k\pi ]\) and, thanks to (40), has a collision. This is a contradiction for Lemma 4.18 and proves (ii).
In order to prove (i) it is enough to observe that a minimizer of the Maupertuis’ functional \({\mathcal {M}}\) with endpoints in the sector \(\Sigma (\vartheta ^*,k)\) cannot leave this sector. Indeed, \(\Sigma (\vartheta ^*,k)\) has a minimal collision arc and its \(2k\pi \)-copy as boundary; this arcs act as a barrier, since Proposition 4.13 applies also in this context and a Bolza minimizer cannot intersect another minimal arc more than once. \(\square \)
We now we extend the previous local study to a global setting,which takes into account all the other centres. In order to do this, we need to show that the local minimization process provides two minimizers which do not collide in \(c_j'\) and such that, if juxtaposed, have winding number equal to 1 with respect to \(c_j'\). In this way, if one takes a minimizer \(u\in K_l\) and assumes that u collides in \(c_j'\), then a contradiction arises. Indeed, the portion of u close enough to \(c_j'\) must correspond to one of the two local minimizers above, depending on if \(l_j=0\) or \(l_j=1\).
Theorem 4.21
In the same setting of Lemma 4.17, there exists \(r^*>0\) such that, for every \(r_0\in (0,r^*)\), for every \(\alpha >{\bar{\alpha }}(U_j,\vartheta ^*,\vartheta ^*+4\pi )\), there exists \(\delta >0\) such that, for every \(q_1,q_2\in \partial B_{r_0}\), there exist two Maupertuis’ minimizers \(u_1\) and \(u_2\) which connect \(q_1\) and \(q_2\) such that
-
(i)
for every \(i=1,2\) we have
$$\begin{aligned} \min \limits _{t\in [0,1]}|u_i(t)|>\delta r_0; \end{aligned}$$ -
(ii)
the juxtaposition u of \(u_1\) and \(u_2\) is a closed path which has winding number 1 with respect to the origin, up to choose a suitable time-parametrization.
Proof
Take \(q_1=r_0e^{i\vartheta _1},q_2=r_0e^{i\vartheta _2}\in \partial B_{r_0}\) and, without loss of generality, assume that \(q_1,q_2\in \Sigma (\vartheta _j,1)\) so that, in particular \(|\vartheta _1-\vartheta _2|<2\pi \). Moreover, it is not restrictive to assume that \(\vartheta _1<\vartheta _2\). By Lemma 4.20 there exists a Maupertuis’ minimizer \(u_1\) which connects \(q_1\) and \(q_2\) and verifies properties (i) and (ii) of such lemma. At this point, define \({\tilde{q}}_1{\mathop {=}\limits ^{.}}r_0e^{i(\vartheta _1+2\pi )}\) which, of course, coincides with \(q_1\) in the Euclidean space, but not with respect to the curved sectors. Indeed, we have that \({\tilde{q}}_1\in \Sigma (\vartheta _j,2)\setminus \Sigma (\vartheta _j,1)\) and, of course, also \(q_2\in \Sigma (\vartheta _j,2)\) (see Figure 5). For this reason, again from Lemma 4.20, we deduce the existence of the second minimal arc \(u_2\), which connects \(q_2\) and \({\tilde{q}}_1\) with the same properties of \(u_1\). Consider the juxtaposition u of \(u_1\) and \(u_2\), which, of course, is a closed curve from \(q_1\) to itself. Since both \(u_1\) and \(u_2\) are collision-less, the winding number of u with respect to the origin is 1. \(\square \)

Situation occurring in Theorem 4.21. We remark that the picture is not referred to the Euclidean space. Indeed, here we denote by \(\gamma _j\) the unique collision minimizer which starts from \(r_0e^{i\vartheta _j}\) in the fashion of Lemma 4.15 and by \(\gamma _j+2\pi \) and \(\gamma _j+4\pi \) its \(2\pi \) and \(4\pi \) copies respectively. This minimal arcs determine the curved sectors used in the proof, while the juxtaposition of \(u_1\) and \(u_2\) is a closed path which winds around the origin
At this point, we are ready to prove that a minimizer \(u\in K_l\) for the Maupertuis’ functional joins property (CF).
Theorem 4.22
Assume that \(N\geqq 2\), \(m\geqq 1\) and consider a function \(V\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\})\) defined as in (4) and satisfying (V)–(\(V_\alpha \)). Fix \(\varepsilon \in (0,{{\tilde{\varepsilon }}})\) as in (12) and consider the potential \(V^\varepsilon \) defined in (8). Fix \(R\in ({\tilde{\varepsilon }},{\mathfrak {m}}^{1/\alpha }-{\tilde{\varepsilon }})\) as in (14) and fix \(l\in {\mathfrak {I}}^N\). Then, there exists \(\delta >0\) such that, for every \(p_1,p_2\in \partial B_R\), every minimizer u of the Maupertuis’ functional
in the space \(K_l^{p_1,p_2}\) found in Proposition 4.7 joins the following properties:
-
(i)
u is free of self-intersections;
-
(ii)
u satisfies
$$\begin{aligned} \min \limits _{t\in [0,1]}|u(t)-c_j'|>\delta ,\quad \text{ for } \text{ every }\ j=1,\ldots ,N. \end{aligned}$$
Therefore, in particular u is collision-less.
Proof
Fix \(\varepsilon \) and R as in the statement, fix \(l\in {\mathfrak {I}}^N\) and \(p_1,p_2\in \partial {B}_R\). Assume by contradiction that a minimizer \(u\in K_l^{p_1,p_2}\) of the Maupertuis’ functional \({\mathcal {M}}\) has a collision with the centre \(c_j'\) for some \(j\in \{1,\ldots ,N\}\); for the sake of simplicity we will assume again \(c_j'=0\). Then, \(u\in \mathfrak {Coll}_l^j\), there exists \(t_0\in (0,1)\) such that \(u(t_0)=0\) and in particular
Then, localizing the collision as in the beginning if this section, we can find an interval \([c,d]\subseteq [0,1]\) such that:
-
\(t_0\in [c,d]\) and the collision is isolated therein;
-
\(\bar{p}_1{\mathop {=}\limits ^{.}}u(c),\bar{p}_2{\mathop {=}\limits ^{.}}u(d)\in \partial B_r\), with \(r<r^*\) and \(r^*>0\) as in Lemma 4.15.
Then, by means of Lemma 4.12, the restriction \(v{\mathop {=}\limits ^{.}}u|_{[c,d]}\) is a minimizer of the Maupertuis’ functional
in the weak \(H^1\)-closure \({\mathcal {K}}_l^{\bar{p}_1,\bar{p}_2}\) of the \(H^1\) restricted paths
Since v solves a Bolza problem for the Maupertuis’ functional inside \(B_r\), by Theorem 4.21, we know that, up to time reparametrizations, v connects \(\bar{p}_1\) and \(\bar{p}_2\) belonging to \(\Sigma (\vartheta _j,1)\) or to \(\Sigma (\vartheta _j,2)\setminus \Sigma (\vartheta _j,1)\), depending on the value of the index \(l_j\). Therefore, by claim (i) of Theorem 4.21, a contradiction arises both if \(l_j=0\) or \(l_j=1\). Thus u cannot have a collisions and in particular, again from Theorem 4.21, (ii) is proved. Claim (i) follows from this property and Proposition 4.10. \(\square \)
4.4 Classical solution arcs
In this section we will conclude the proof of the existence of internal arcs, finally showing that the minimizer of the Maupertuis’ functional satisfies property (R) introduced in Section 4.2. In particular, in the next result we show that, given a minimizer u provided in Proposition 4.7, if u has endpoints sufficiently close to minimal non-degenerate central configurations of \(W^0\), then \(|u(t)|<R\) whenever \(t\in (0,1)\). Recall that \(W^0\) is \(-\alpha \)-homogeneous (see (11)) and it is the leading component of the total potential \(V^\varepsilon (y)\) when \(\varepsilon \rightarrow 0^+\) and |y| becomes very large. This suggests to use compactness properties of sequences of minimizers and their convergence to a minimal collision arc for the anisotropic Kepler problem driven by \(W^0\). We will consider again Lemma 4.15 from [2], in which the authors show that all the collision minimizers starting sufficiently close to minimal non-degenerate central configurations describe a foliation which is strictly contained in a given cone. Recall that, from the second line of assumption (V), as already observed in Remark 2.3, the sum potential \(W^0\) admits a finite number of minimal non-degenerate central configurations
where, in polar coordinates \(y=(r,\vartheta )\)
Therefore, it is not restrictive to work with two of this central configurations \(\vartheta ^*,\vartheta ^{**}\in {\mathbb {S}}^{1}\), since we are solving a Bolza problem, but it is clear that the result holds choosing any pair (not necessarily distinct) of central configurations.
Theorem 4.23
Assume that \(N\geqq 2\), \(m\geqq 1\) and consider a function \(V\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\})\) defined as in (4) and satisfying (V). Fix \(R>0\) as in (14). Then, there exists \(\varepsilon _{int}>0\) such that, for any \(\vartheta ^*,\vartheta ^{**}\in \Xi \) minimal non degenerate central configurations for \(W^0\), defining \(\xi ^*{\mathop {=}\limits ^{.}}Re^{i\vartheta ^*},\xi ^{**}{\mathop {=}\limits ^{.}}Re^{i\vartheta ^{**}}\in \partial B_R\), there exist two neighbourhoods \({\mathcal {U}}_{\xi ^*},\,{\mathcal {U}}_{\xi ^{**}}\) on \(\partial B_R\) with the property
where u is the minimizer of the Maupertuis’ functional in the space \(K_l^{p_1,p_2}\) provided in Proposition 4.7.
Proof
Assume by contradiction that there exist the following sequences:
-
\((\varepsilon _n)\subseteq {{\mathbb {R}}}^+\), with \(\varepsilon _n\rightarrow 0^+\),
-
\((p_1^n)\subseteq {\mathcal {U}}_{\xi ^*}\) and \((p_2^n)\subseteq {\mathcal {U}}_{\xi ^{**}}\) such that, up to subsequences, \(p_1^n\rightarrow p_1\in {\mathcal {U}}_{\xi ^*}\) and \(p_2^n\rightarrow p_2\in {\mathcal {U}}_{\xi ^{**}}\);
-
\((t_n)\subseteq (0,1)\) such that \(t_n\rightarrow \bar{t}\in [0,1]\);
-
a sequence of minimizers \((u_n)\subseteq (K_l^{p_1^n,p_2^n})\) for the sequence of functionals \(({\mathcal {M}}_n)\) defined by
$$\begin{aligned} {\mathcal {M}}_n(u_n){\mathop {=}\limits ^{.}}\frac{1}{2}\int _0^1|{\dot{u}}_n|^2\int _0^1 \left( -1+V^{\varepsilon _n}(u_n)\right) , \end{aligned}$$
such that
Recalling the limiting behaviour of \(V^\varepsilon \) as \(\varepsilon \rightarrow 0^+\) (see Proposition 2.2), if we define
from Lemma 4.15 we know that there exists a unique \(u^*\in H_{coll}^{p_1}\) and a unique \(u^{**}\in H_{coll}^{p_2}\) such that
In particular, from Proposition 4.3, we have that there exists a unique \(u_0\in H^{p_1,p_2}\), where
such that
where this path \(u_0\) is nothing but the juxtaposition of \(u^*\) and \(u^{**}\). We claim that
and we start by showing that
For every \(n\in {{\mathbb {N}}}\) let us introduce the Jacobi-length functionals
and, since \(u_n\) and \(u_0\) are minimizers, we have
(see Proposition A.3 in Appendix 7). Our idea is to provide an explicit variation \(w_n\in K_l^{p_1^n,p_2^n}\) such that, for large n
for some \(\beta >0\), which would prove (42). In order to build such \(w_n\) we need to define some points inside \(B_R\):
-
define \({\hat{p}}_1^n\in \varepsilon _n\partial B_R\) as the first intersection between \(u_0\) and the circle \(\varepsilon _n\partial B_R\);
-
define \({\hat{p}}_2^n\in \varepsilon _n\partial B_R\) as the second intersection between \(u_0\) and the circle \(\varepsilon _n\partial B_R\);
-
define \(q_1^n{\mathop {=}\limits ^{.}}\varepsilon _nR\frac{\xi ^*}{|\xi ^*|}\in \varepsilon _n\partial B_R\) and \(q_2^n{\mathop {=}\limits ^{.}}\varepsilon _nR\frac{\xi ^{**}}{|\xi ^{**}|}\in \varepsilon _n\partial B_R\).
Note that, once n is fixed, the points \({\hat{p}}_1^n,{\hat{p}}_2^n\) are uniquely determined since both \(u^*\) and \(u^{**}\) are strictly decreasing with respect to t thanks to the Lagrange-Jacobi inequality (see [2, Lemma 4.3]). Moreover, we define the building blocks of \(w_n\) in this way:
-
define \(\text{ arc }(p_1^n,p_1)\) as the shorter (in the Euclidean metric) parametrized arc of \(\partial B_R\), connecting \(p_1^n\) to \(p_1\) with constant angular velocity;
-
define \(\gamma _n^*\) as the portion of \(u_0\) that goes from \(p_1\) to \({\hat{p}}_1^n\);
-
define \(\text{ arc }({\hat{p}}_1^n,q_1^n)\) as as the shorter (in the Euclidean metric) parametrized arc of \(\partial B_R\), connecting \({\hat{p}}_1^n\) to \(q_1^n\) with constant angular velocity;
-
define \(\varphi _n\) as the minimizer of \({\mathcal {L}}_n\) in the space \(K_l^{q_1^n,q_2^n}\);
-
define as above the analogous path composed by the pieces \(\text{ arc }(q_2^n,{\hat{p}}_2^n)\), \(\gamma _n^{**}\), \(\text{ arc }(p_2,p_2^n)\), which goes from \({\hat{p}}_2^n\) to \(p_2^n\).
At this point, we build \(w_n\) as the juxtaposition of the previous pieces with a suitable time parametrization
(see Figure 6). Now, since \({\mathcal {L}}_n\) is additive, the length of \(w_n\) is exactly the sum of the length of every piece and, in particular, since \(w_n\in K_l^{p_1^n,p_2^n}\) and \(u_n\) is a minimizer of \({\mathcal {L}}_n\) in the same space, we have
The next estimates on the arch lengths easily follow:
as \(n\rightarrow +\infty \). From Proposition 2.2, we know that, if \(y\in {{\mathbb {R}}}^2\setminus B_\delta \) with \(\delta >\varepsilon _n\), then
hence
Therefore, to prove the claim (43), we need to provide an estimate on \({\mathcal {L}}_n(\varphi _n)\); to do that, let us define the blow-up sequence
and note that
Moreover, recalling the definition (8) of \(V^{\varepsilon _n}\), for \(n\in {{\mathbb {N}}}\) and \(y\in {{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\}\) we can compute
and thus we have
where we have put
Notice that, at this point, the function \({\tilde{\varphi }}_n\) is clearly a minimizer for \(\tilde{{\mathcal {L}}}_n\) in the space
where \(q^*\) and \(q^{**}\) have been defined in (44). If we furthermore introduce the length functional \(\tilde{{\mathcal {L}}}_0(\varphi ){\mathop {=}\limits ^{.}}\int _0^1|{\dot{\varphi }}|\sqrt{V(\varphi )}\) we have that, for every \(n\in {{\mathbb {N}}}\) and for every test function \(\varphi \)
and so, in particular \(\tilde{{\mathcal {L}}}_n({\tilde{\varphi }}_n)\leqq \min _{S_l^{q^{*},q^{**}}} \tilde{{\mathcal {L}}}_0\leqq C\), for some constant \(C>0\). This last inequality finally gives the estimates (43) and thus (42).
At this point, in order to get the claim (41), we prove the reverse inequality, that is,
Since every component of the potential \(V^{\varepsilon _n}\) is bounded on \({\mathbb {S}}^{1}\) and \(|u_n|\leqq R\), together with (42) we can deduce that there exists \(C_1,C_2>0\) such that
at least for n large enough. From this, we deduce a uniform bound on the \(H^1\)-norm of \((u_n)\) and the existence of a \(H^1\)-weak and uniform in [0, 1] limit \(\bar{u}\in H^{p_1,p_2}\). The Fatou’s lemma, the semi-continuity of the \(H^1\)-norm and the almost everywhere convergence of \(V^{\varepsilon _n}\) to \(W^0\) in \({{\mathbb {R}}}^2\) then give
At this point, the minimality of \(u_0\) for \({\mathcal {M}}_0\) in the space \(H^{p_1,p_2}\) gives the inequality (45) and, together with (42), we get the claim (41)
with, in particular
At this point, a bootstrap technique helped by the conservation of the energy for \((u_n)\) leads to a \({\mathcal {C}}^1\)-convergence outside the collision instant \(t_0\) of \(u_0\); this proves that \(|u_0(\bar{t})|=R\). If \({\bar{t}}\in (0,1)\) this is a contradiction for Lemma 4.15, because the minimizer \(u_0\) cannot leave the cone therein defined; otherwise, if for instance \(t_n\rightarrow 0^+\), we would find that \({\dot{u}}_0(0)\) is tangent to \(\partial B_R\). This indeed is also a contradiction: up to make \({\mathcal {U}}_{\xi ^*}\) smaller, the unique collision trajectory from \(p_1\in {\mathcal {U}}_{\xi ^*}\) must have initial velocity direction close to the initial velocity of the homothetic motion starting from \(\xi ^*\), which is normal to sphere. \(\square \)

The proof of Theorem 4.23: the blue path \(w_n\) piecewise built in the proof belongs to the space \(K_l^{p_1^n,p_2^n}\), as well as the blue dashed path \(u_n\). This makes it a suitable competitor for \(u_n\) and allows to use the minimization argument. In this picture, the red dashed path \(u_0\) represents the limit collision path which belongs to the space \(H^{p_1,p_2}\) and that actually connects \(p_1\) and \(p_2\) on \(\partial B_R\)
Now, we can finally show that a minimizer of the Maupertuis’ functional is actually a reparametrization of a classical solution arc of the inner problem.
Theorem 4.24
Assume that \(N\geqq 2\), \(m\geqq 1\) and consider a function \(V\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\})\) defined as in (4) and satisfying (V)–(\(V_\alpha \)). Fix \(R>0\) as in (14). Then, there exists \(\varepsilon _{int}>0\) such that, for any \(\vartheta ^*,\vartheta ^{**}\in \Xi \) minimal non degenerate central configurations for \(W^0\) (they could be equals), defining \(\xi ^*{\mathop {=}\limits ^{.}}Re^{i\vartheta ^*},\xi ^{**}{\mathop {=}\limits ^{.}}Re^{i\vartheta ^{**}}\in \partial B_R\), there exist two neighbourhoods \({\mathcal {U}}_{\xi ^*},\,{\mathcal {U}}_{\xi ^{**}}\) on \(\partial B_R\) with the following property:
for any \(\varepsilon \in (0,\varepsilon _{int})\), for any \(l\in {\mathfrak {I}}^N\), for any pair of endpoints \(p_1\in {\mathcal {U}}_{\xi ^*}\),\(p_2\in {\mathcal {U}}_{\xi ^{**}}\), given the potential \(V^\varepsilon \) defined in (8), there exist \(T>0\) and a classical (collision-less) solution \(y\in {\hat{K}}_l^{p_1,p_2}([0,T])\) of the inner problem
In particular, y is a re-parametrization of a minimizer of the Maupertuis’ functional in the space \({\hat{K}}_l^{p_1,p_2}([0,1])\) and it is free of self-intersections and there exists \(\delta >0\)
Proof
The proof is a direct consequence of Theorem 4.22 (property (CF)), Theorem 4.23 (property (R)) and Theorem 4.1 (the Maupertuis’ Principle). \(\square \)
In order to conclude the construction of the interior arcs for the N-centre problem, we need to give a version of Theorem 4.24 which takes into account the language of partitions. We invite the reader to go back to Section 4.2 and we note that a minimizer \(u\in {\hat{K}}_l^{p_1,p_2}\) which is free of self intersections satisfies the topological constraint of separation of the centres (see Proposition 4.10 and Remark 4.11). In particular, recalling the definition of the set of all the partitions in two non-trivial subsets of the centres
a choice of \(l\in {\mathfrak {I}}^N\) will induce a choice of \(P_j\in {\mathcal {P}}\), for some j and this is not 1-1. Notice that the lack of the 1-1 property is due to the fact that, for instance, if \(N=3\) the winding vectors (1, 0, 0) and (0, 1, 1) produce respectively two minimizers that separate the centres with respect to the same partition (see Figure 7).

An example of two minimal arcs which realize the same partition of the centres. Indeed, both the paths divide the centres with respect to the partition \(\{\{c_1\},\{c_2,c_3\}\}\), but \(u_1\in K_{(0,1,1)}^{p_1,p_2}\) while \(u_2\in K_{(1,0,0)}^{p_1,p_2}\)
Following the notations introduced in [39], define the map \({\mathcal {A}}:{\mathfrak {I}}^N\rightarrow {\mathcal {P}}\) which associates to every winding vector
the partition
As already observed, the map \({\mathcal {A}}\) is surjective, but not injective, since \({\mathcal {A}}(l)={\mathcal {A}}({\tilde{l}})\), for every \(l,{\tilde{l}}\in {\mathfrak {I}}^N\) such that
At this point, for any \(j\in \{0,\ldots ,2^{N-1}-2\}\) and for any \(p_1,p_2\in \partial B_R\). this set are well-defined
The set \(K_{P_j}\) is the weak \(H^1\)-closure of \({\hat{K}}_{P_j}\) and, if \(P_j={\mathcal {A}}(l)={\mathcal {A}}({\tilde{l}})\), it turns out that it is exactly the union of two disjoint connected components, that is,
We can now state the main theorem of this section which is readily proven.
Theorem 4.25
Assume that \(N\geqq 2\), \(m\geqq 1\) and consider a function \(V\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\})\) defined as in (4) and satisfying (V)–(\(V_\alpha \)). Fix \(R>0\) as in (14). Then, there exists \(\varepsilon _{int}>0\) such that, for any \(\vartheta ^*,\vartheta ^{**}\in {\mathbb {S}}^{1}\) minimal non degenerate central configurations for \(W^0\) (they could be equals), defining \(\xi ^*{\mathop {=}\limits ^{.}}Re^{i\vartheta ^*},\xi ^{**}{\mathop {=}\limits ^{.}}Re^{i\vartheta ^{**}}\in \partial B_R\), there exist two neighbourhoods \({\mathcal {U}}_{\xi ^*},\,{\mathcal {U}}_{\xi ^{**}}\) on \(\partial B_R\) with the following property:
for any \(\varepsilon \in (0,\varepsilon _{int})\), for any \(P_j\in {\mathcal {P}}\), for any pair of endpoints \(p_1\in {\mathcal {U}}_{\xi ^*}\),\(p_2\in {\mathcal {U}}_{\xi ^{**}}\), given the potential \(V^\varepsilon \) defined in (8), there exist \(T_1,T_2>0\) and two classical (collision-less) solutions \(y_1\in {\hat{K}}_{P_j}^{p_1,p_2}([0,T_1])\) and \(y_2\in {\hat{K}}_{P_j}^{p_1,p_2}([0,T_2])\) of the inner problems
for \(i=1,2\). In particular, \(y_1\) and \(y_2\) are re-parametrizations of two minimizers of the Maupertuis’ functional, every one of them in a different connected component of \(K_{P_j}\) (see (47)). Moreover, \(y_1\) and \(y_2\) are free of self-intersections and there exists \(\delta >0\) such that
for \(i=1,2\).
We conclude this section with a property of the inner solution arcs found in Theorem 4.25, that is, we show that there exists a uniform bound on the time intervals of such solutions
Lemma 4.26
Let \(\varepsilon \in (0,\varepsilon _{int})\), let \(\vartheta ^*,\vartheta ^{**}\in {\mathbb {S}}^{1}\) be two minimal non-degenerate central configurations for \(W^0\) and \({\mathcal {U}}^*,{\mathcal {U}}^{**}\) be their suitable neighbourhoods, let \(p_1\in {\mathcal {U}}^*\) and \(p_2\in {\mathcal {U}}^{**}\), let \(P_j\in {\mathcal {P}}\) and let \(y_{P_j}(\cdot ;p_1,p_2;\varepsilon )\) be one of the two classical solutions found in Theorem 4.25, defined in its time interval \([0,T_{P_j}(p_1,p_2;\varepsilon )]\). Then, there exist \(c,C>0\) such that
Such constants do not depend on the choice of \(p_1,p_2\) and \(P_j\).
Proof
The proof is an easy generalization of Lemma 5.2 in [39]. \(\square \)
Remark 4.27
In the following, when the partition of the centres will not have a relevance, we will denote one of the internal arcs provided in Theorem 4.25 in this way
in order to highlight that it is an arc lying inside \(B_R\) that connects \(p_1\) and \(p_2\). Moreover, the corresponding neighbourhoods on \(\partial B_R\) will be denoted as
5 Glueing pieces and multiplicity of periodic solutions
Since we have proved the existence of outer and inner fixed-ends solution arcs, respectively in Sections 3 and 4, this section is devoted to build periodic trajectories which solve
glueing together solution pieces on \(\partial B_R\). We will focus on the non-collisional case, in order to succeed in the proof of Theorem 1.6 and thus we will require hypotheses (V)-(\(V_\alpha \)) on \(V^\varepsilon \). An equivalent result for possibly colliding periodic solutions will be given in Section 6.2 (see Theorem 6.4), but it is worth noticing that the glueing process is not affected by collisions, since it concerns the behaviour of trajectories far from the singularity set.
Let \(\varepsilon \in (0,\min \{\varepsilon _{int},\varepsilon _{ext}\})\), with \(\varepsilon _{int},\varepsilon _{ext}>0\) provided in Theorem 3.10 and Theorem 4.25, and let \(n\in {{\mathbb {N}}}_{\geqq 1}\) be the number of pairs of inner and outer arcs; the idea is to relate a periodic trajectory in the punctured plane with a double sequence of this kind
where \(P_j\in {\mathcal {P}}\) is a partition of the centres and \(\xi _j^*=Re^{i\vartheta _j^*}\), with \(\vartheta _j^*\in \Xi \) minimal non-degenerate central configuration for \(W^0\), for every \(j=0,\ldots , n-1\). Note that we admit the case when two or more elements of the sequence could be equals.
From Theorem 3.10 we know that, for every \(j=0,\ldots ,n-1\) there exists a neighbourhood \({\mathcal {U}}_{ext}(\xi _j^*)\subseteq \partial B_R\) of \(\xi _j^*\) such that, for every \((p_{2j},p_{2j+1})\in {\mathcal {U}}_{ext}(\xi _j^*)\times {\mathcal {U}}_{ext}(\xi _j^*)\) there exists an outer arc \(y_{ext}(\cdot ;p_{2j},p_{2j+1};\varepsilon )\), defined on a suitable time interval \([0,T_{\varepsilon ,2j}]\), which starts in \(p_{2j}\) and arrives in \(p_{2j+1}\). We then select 2n points on \(\partial B_R\)
so that \(p_{2j},p_{2j+1}\in {\mathcal {U}}_{ext}(\xi _j^*)\) are connected through an outer solution arc, for every \(j=0,\ldots ,n-1\).
Now, for any \(j=1,\ldots ,n-1\), thanks to Theorem 4.25 and in view of the notations introduced in Remark 4.27, if \(p_{2j-1}\in {\mathcal {U}}_{int}(\xi _{j-1}^*)\) and \(p_{2j}\in {\mathcal {U}}_{int}(\xi _j^*)\), we can connect them through a minimizing inner arc \(y_{int}(\cdot ;p_{2j-1},p_{2j};\varepsilon )\) verifying the partition \(P_j\). Up to time re-parametrizations, the inner arc will be defined in the interval \([0,T_{\varepsilon ,2j-1}]\).
At this point, in order to build a closed orbit, for any \(j=0,\ldots ,n-1\) we introduce a smaller neighbourhood of \(\xi _j^*\)
and we select an ordered sequence of pairs \((p_{2j},p_{2j+1})\in {\mathcal {U}}_j\times {\mathcal {U}}_j\). Moreover, to close the orbit, we add a last inner arc, joining \(p_{2n-1}\) and \(p_{2n}{\mathop {=}\limits ^{.}}p_0\) and that realizes the partition \(P_0\). We denote this arc as \(y_{int}(\cdot ;p_{2n-1},p_{2n};\varepsilon )\) and we parametrize it on the interval \([0,T_{\varepsilon ,2n-1}]\).
In addition, it is useful to define
and thus to introduce the following closed set
which describes all the possible cuts on the sphere \(\partial B_R\) which an orbit could do, once sequence (48) is fixed. In this way, for every \({\mathbf {p}}\in {\mathcal {S}}\), we can define the periodic trajectory \(\gamma _{\varepsilon ,{\mathbf {p}}}\) as the alternating juxtaposition of n outer arcs and n inner arcs, up to time re-parametrizations. This curve will be \({\mathbf {T}}_{\varepsilon }\)-periodic, where \({\mathbf {T}}_{\varepsilon }{\mathop {=}\limits ^{.}}\sum \limits _{j=0}^{2n-1}T_{\varepsilon ,j}\) and piecewise-differentiable thanks to Theorems 3.10 and 4.25. In general, the function \(\gamma _{\varepsilon ,{\mathbf {p}}}\) is not \({\mathcal {C}}^1\) in the junction points and, indeed, the main result of this section is to prove this differentiability through a variational technique.
Remark 5.1
We are going to minimize a length functional over \({\mathcal {S}}\) in order to provide the smoothness of the junctions. Indeed, we have defined \({\mathcal {S}}\) as a subset of the closure of \({\mathbf {U}}\) to induce compactness. However, we know from Theorem 3.10 and Theorem 4.25 that the construction of outer and inner arcs works just for the interior points of \({\mathcal {U}}_j\). For this reason, we might make such neighbourhoods smaller, keeping the same notations. Furthermore, without loss of generality, we assume that the non-degeneracy of every central configuration \(\vartheta _j^*\) of \(W^0\) is preserved along its corresponding neighbourhood \({\mathcal {U}}_j\).
In order to proceed, let us first fix a sequence (48) and \(\varepsilon \in (0,\min \{\varepsilon _{ext},\varepsilon _{int}\})\). Define the total Jacobi length function \({\mathbf {L}}:{\mathcal {S}}\rightarrow {{\mathbb {R}}}\) as
The compactness of the set \({\mathcal {S}}\) implies the following result:
Lemma 5.2
There exists \({\bar{\mathbf{p}}}\in {\mathcal {S}}\) that minimizes \({\mathbf {L}}\).
Proof
The proof goes exactly as in Step 1) of Theorem 5.3. of [39]. \(\square \)
The aim of this section is thus to prove through several steps the following result, which then will induce the proof of Theorem 1.6 (and Theorem 6.4 for the possibly collisional case).
Theorem 5.3
There exists \({{\bar{\varepsilon }}}>0\) such that, for every \(\varepsilon \in (0,{{\bar{\varepsilon }}})\), for every \(n\geqq 1\) there exists \({\bar{\mathbf{p}}}=(\bar{p}_0,\bar{p}_1,\ldots ,\bar{p}_{2n}) \in \mathring{{\mathcal {S}}}\) such that
-
(i)
the following holds
$$\begin{aligned} \min \limits _{{\mathbf {p}}\in {\mathcal {S}}}{\mathbf {L}}({\mathbf {p}}) ={\mathbf {L}}({\bar{\mathbf{p}}}); \end{aligned}$$ -
(ii)
the corresponding function \(\gamma _{\varepsilon ,{\bar{\mathbf{p}}}}\) is a periodic solution in \([0,{\mathbf {T}}_\varepsilon ]\) of the N-centre problem
$$\begin{aligned} {\left\{ \begin{array}{ll} \ddot{\gamma }=\nabla V^\varepsilon (\gamma ) \\ \frac{1}{2}|{\dot{\gamma }}|^2-V^\varepsilon (\gamma )=-1. \end{array}\right. } \end{aligned}$$(49)
The idea is to provide global smoothness of \(\gamma _{\varepsilon ,{\bar{\mathbf{p}}}}\) as a consequence of the Euler-Lagrange equation
In order to compute the partial derivatives of \({\mathbf {L}}\) we need the uniqueness for each of the 2n pieces that compose the juxtaposition \(\gamma _{\varepsilon ,{\bar{\mathbf{p}}}}\). The \({\mathcal {C}}^1\)-dependence on initial data guarantees this property for the outer arcs (see Theorem 3.10). On the contrary, the Maupertuis’ principle that we have used so far to find internal solution arcs, does not provide the uniqueness of such paths (see indeed 4.25). To overcome this, it would be necessary to proceed as in [39, 40] and to restrict again the neighbourhoods \({\mathcal {U}}_j\) in order to work inside a strictly convex neighbourhood. Indeed, it is known that there exists a unique geodesic that connects two points which belong to some neighbourhoods with such property. Since a rigorous treatment in this direction would be very technical and, actually, a repetition of what has been made in the quoted addendum, we will assume that the neighbourhoods \({\mathcal {U}}_j\) fit this uniqueness property and thus we will compute directly the partial derivatives and we assume the validity of this lemma without further details.
Lemma 5.4
The function \({\mathbf {L}}\) admits partial derivatives in \(\mathring{{\mathcal {S}}}\).
5.1 Partial derivatives of the Jacobi length with respect to the endpoints
In this paragraph we make the explicit computations of the partial derivatives of \({\mathbf {L}}\). The only non-trivial contributions involved in the computation of the partial derivative of \({\mathbf {L}}\) with respect to some \(p_k\) are given by the length of a selected pair of outer and inner arcs, that is, the ones that share the contact point \(p_k\). Therefore, for the sake of simplicity, in the following proofs we are going to consider only the length of the first outer arc \(y_{ext}(t;p_{0},p_{1};\varepsilon )\) and the last of the inner arcs \(y_{int}(t;p_{2n-1},p_{2n};\varepsilon )=y_{int}(t;p_{2n-1},p_{0};\varepsilon )\), which connect in \(p_0\).
From Theorem 3.10 and following the notations introduced at the beginning of this section, given \(\vartheta _0^*\in \Xi \) and \(\xi _0^*=Re^{i\vartheta _0^*}\in \partial B_R\), we know that, for every \(\varepsilon \in (0,\min \{\varepsilon _{ext},\varepsilon _{int}\})\) and for every \(p_0,p_1\in {\mathcal {U}}_0\), there exists a unique outer arc \(y_{ext}(t)=y_{ext}(t;p_0,p_1;\varepsilon )\) which solves the problem
It is important to remark that both \(T_{\varepsilon ,0}\) and \(y_{ext}\), with its first and second derivatives, depend on \(p_0\) and \(p_1\), while \(\varepsilon \) does not depend on \(p_0\) and \(p_1\). In particular, from the proof of Theorem 3.10, we have that \(T_{\varepsilon ,0}=T_{\varepsilon ,0}(\varepsilon ,p_0,p_1){\mathop {=}\limits ^{.}}T(p_0,\eta (\varepsilon ,p_0,p_1))\), where \(\eta \) is the implicit function defined by the shooting map.
Consider the length of the external arc \({\mathcal {L}}_{ext}:{\mathcal {U}}_0\times {\mathcal {U}}_0\rightarrow {{\mathbb {R}}}_0^+\) such that
which, using the conservation of energy, can be written in the following two equivalent forms
Lemma 5.5
The function \({\mathcal {L}}_{ext}\in {\mathcal {C}}^1({\mathcal {U}}_0 \times {\mathcal {U}}_0)\) and its differential, for every \((p_0,p_1)\in {\mathcal {U}}_0\times {\mathcal {U}}_0\), is
such that
Proof
Thanks to the \({\mathcal {C}}^1\)-dependence of problem (50) on the initial data and time, the function \({\mathcal {L}}_{ext}\) is of class \({\mathcal {C}}^1\) in \({\mathcal {U}}_0\times {\mathcal {U}}_0\). Moreover, from (51) and integrating by parts we obtain
Note that the term \({\dot{y}}_{ext}(t)\frac{\partial {\dot{y}}_{ext}(t)}{\partial p_0}\) is actually a \((1\times 2)\cdot (2\times 2)\) matrix product, so that we would have to transpose the vector \({\dot{y}}_{ext}(t)\) firstly. Anyway, we are going to omit this and other transpositions in order to ease the notations.
Now, we can also compute the total derivative of the boundary conditions in (50) with respect to \(p_0\), obtaining
and
Moreover, multiplying both sides of (54) by \({\dot{y}}_{ext}(T_{\varepsilon ,0})\), we have
This, together with (52) and (53), leads to
With the same computations, one obtains
\(\square \)
As before, for \(\varepsilon \in (0,\min \{\varepsilon _{ext},\varepsilon _{int}\})\), we can consider the length of the inner arc \(y_{int}(t){\mathop {=}\limits ^{.}}y_{int}(t;p_{2n-1},p_0;\varepsilon )\) as the function \({\mathcal {L}}_{int}:{\mathcal {U}}_{2n-1}\times {\mathcal {U}}_0 \rightarrow {{\mathbb {R}}}_0^+\) such that
and prove the following lemma.
Lemma 5.6
The function \({\mathcal {L}}_{int}\in {\mathcal {C}}^1({\mathcal {U}}_{2n-1} \times {\mathcal {U}}_0)\) and its differential, for every \((p_{2n-1},p_0)\in {\mathcal {U}}_{2n-1}\times {\mathcal {U}}_0\), is
such that
Proof
As we have already remarked in the discussion above Lemma 5.4, the differentiability of this length function is a consequence of the results contained in [40], up to restrict the neighbourhoods \({\mathcal {U}}_{2n-1}\) and \({\mathcal {U}}_0\). Concerning the computation of the differential, the proof goes exactly as in Lemma 5.5. \(\square \)
5.2 The minimizing points of the Jacobi length are not in the boundary
The purpose of this section is to prove the first statement of Theorem 5.3. From Lemma 5.2 it sufficient to show that the minimizer \(\mathbf {\bar{p }}\) does not occur on the boundary of \({\mathcal {S}}\). In the next two rather technical paragraphs we will study the local behaviour of the external and internal arcs with respect to small variations on the endpoints. In short, what happens is that, if \({\bar{\mathbf{p}}}\in \partial {\mathcal {S}}\), then a particular variation on the endpoints gives a contradiction against the minimality of \({\bar{\mathbf{p}}}\).
5.2.1 An explicit variation on the external path
In order to do this, we first associate to the outer problem (50) its flow \(\Phi ^t(p_0,v_0)\) which actually depends on \(\varepsilon \) too; we omit this dependence to ease the notations. Moreover, keeping in mind the notations of Theorem 3.10, we have that
where \(v_0=v_0(\varepsilon ,p_0,p_1)={\dot{y}}_{ext}(0;p_0,p_1;\varepsilon )\) and
with \(v_1=v_1(\varepsilon ,p_0,p_1)\). Finally, we observe that the outer problem (50) is time-reversible, since it is not difficult to prove that
In order to see how the solution \(y_{ext}\) behaves under small variations on \(p_1\) let us start by defining the matrix function M as the derivative of \(y_{ext}\) with respect to the arriving point (cf. Remark 3.3), that is,
which, from (50), satisfies
Moreover, from (55), we have that
so that M(t) is a solution of the boundary value problem
Lemma 5.7
Let \(M=M(t)\) be a solution of (57). Then,
Proof
Recalling that \(v_0(\varepsilon ,p_0,p_1)={\dot{y}}_{ext}(0;p_0,p_1;\varepsilon )\), since problem (50) is time-reversible (see (56)), we have that
\(\square \)
Let us focus on some details for a moment. The function M(t) is actually the solution of the variational equation (see Remark 3.3) around an external arc \(y_{ext}\), which gives information on how the flow associated to such solution changes under infinitesimal variations on the boundary conditions. Moreover, we know that \(y_{ext}\) (and thus, M) depends on \(\varepsilon \) in a \({\mathcal {C}}^1\) manner, since we have shown that the anisotropic N-centre problem is a perturbation of a Kepler problem driven by \(W^0\) (see Proposition 2.2 in Section 2). Therefore, it makes sense to simplify the proof and to consider a particular problem, that is, the one around the homothetic solution emanating from some \(\xi ^*=Re^{i\vartheta ^*}\) and to put \(\varepsilon =0\). The characterization of the Hessian matrix of \(W^0\) given in Remark 3.2 will be very useful in this context. Finally, the non-degeneracy of \(W^0\), which is fundamental in the forthcoming proof, is guaranteed also in a neighbourhood of \(\xi ^*\), so that the argument can be easily extended near \(\xi ^*\) (see Remark 5.1). Therefore, let us consider the homothetic trajectory \({\hat{y}}_{\xi ^*}(t)=y_{ext}(t;\xi ^*,\xi ^*;0)\). Around this solution, problem (57) becomes
where clearly \(T>0\) is the first return time of the homothetic motion. Following the approach of Section 3, we study the projection of (58) on the tangent space, thus reducing to a 1-dimensional setting.
Lemma 5.8
Let \(M=M(t)\) be a solution of (58) and let us define \(s_\xi {\mathop {=}\limits ^{.}}\xi ^*/|\xi ^*|\) and its unitary orthogonal vector \(s_\tau =s_\xi ^\perp \). Moreover, define the 1-dimensional functions
where the last equality has been proven in (22). Then w solves
and
Proof
From the definition of w and since M(t) solves (58) it is clear that
Now, since \(\nabla ^2W^0({\hat{y}}_{\xi ^*}(t))\) is symmetric and admits \(s_\tau \) as eigenvector with eigenvalue \(\lambda _\tau (t)=\langle \nabla ^2W^0({\hat{y}}_{\xi ^*}(t))s_\tau ,s_\tau \rangle \) (see (20)), we can write
Hence, considering the boundary conditions satisfied by M(t) in (58) we conclude that w solves (59).
Concerning v, using the same argument, we deduce that it solves
with \(\lambda _\xi (t) = |{\hat{y}}_{\xi ^*}(t)|^{-\alpha -2}\alpha (\alpha +1)U(\vartheta ^*)\) (see (21)). Since \(\lambda _\xi (t)>0\) then \(v\equiv 0\) in [0, T]. \(\square \)
As a consequence of Lemmas 5.7 and 5.8, we can directly deduce this useful result.
Corollary 5.9
Let M, w and v as in Lemma 5.8 and recall the notations of Lemma 5.7. Then
and, for every \(k\in [-1,1]\),
and
At this point, our aim is to prove a result which actually gives an estimate of the tangential component of the velocity \(v_0=v_0(0,p_0,p_1)\), with respect to oscillations of \(p_0\) and \(p_1\) around the central configuration \(\xi ^*\). In order to do this, it is useful to introduce polar coordinates to provide an explicit dependence of \(p_0\) and \(p_1\) on an angular variation. Indeed, we characterize every point \(p\in {\mathcal {U}}_0={\mathcal {U}}_0(\xi ^*)\) as a function of the counter-clockwise angle \(\phi \in (-\pi ,\pi )\) joining p and \(\xi ^*\), so that
(see Figure 8). We furthermore remark that when we write the orthogonal of a vector we mean a counter-clockwise rotation of \(\pi /2\) of such vector.

The notations of Lemma 5.10 and the behaviour of the initial velocity with respect to variations on the endpoints \(p_0\) and \(p_1\)
Lemma 5.10
There exists \(\delta =\delta (\vartheta ^*),\,C=C(\vartheta ^*)>0\) such that, for any \(\phi _0,\phi _1\in {{\mathbb {R}}}\) verifying \(0<|\phi _0|<\delta \) and \(|\phi _1|\leqq |\phi _0|\), the following holds:
(see Figure 8).
Proof
For the sake of simplicity we introduce these notations
Furthermore, we prove the statement for \(\phi _0>0\); if \(\phi _0\) is negative, the proof is the same up to minor changes. Since \(v_{\xi ^*}\) is the initial velocity of the homothetic motion along a central configuration, it is orthogonal to \(s_\tau \), then \(\langle v_{\xi ^*},p_0(0)^\perp \rangle =0\) and so we can write
From the notations in (61), if \(\phi \rightarrow 0^+\), than we have
hence, as \(\phi _0\rightarrow 0^+\),
Furthermore, again as \(\phi _0 \rightarrow 0^+\) (and thus, as \(\phi _1\rightarrow 0^+\))
Assuming now \(\phi _1 = k\phi _0\) for some \(k\in [-1,1]\), and using (60) in Corollary 5.9 and the fact that \(p_0(0)^\perp = Rs_\tau \), we have
so that
In order to conclude we need to prove the existence of a positive constant C, depending on \(\phi _0\) and k, such that
By means of Corollary 5.9, this is equivalent to prove that
where w(t) solves (59).
Let now \(u(t) = |{\hat{y}}_{\xi ^*}(t)|\); then u solves the 1-dimensional problem
Since, by assumption \(U''(\vartheta ^*)> 0\), we have
recalling that the function c(t) has been introduced in Lemma 5.8.
Since \(u(t) \ne 0\) for any \(t \in [0,T]\), we can define \(f(t)=\frac{w(t)}{u(t)}\) and compute
Multiplying both sides by \(u^2\) we deduce that f solves the problem
We want to prove that f is strictly positive in (0, T]; hence, suppose by contradiction that there exists \(t^*\in (0,T)\) such that \(f(t^*)=0\). Then, it is clear that there exists \(t_m\in (0,t^*]\) such that
In this way, considering the equation in (65) and the inequality (64), we get
which is a contradiction. Therefore, f is strictly positive in the interval (0, T].
Now, integrating the equation in (65) in [0, T] we get
and, using the explicit expression of \({\dot{f}}\), we have
Moreover, since f can not vanish in (0, T], we have that necessarily \({\dot{f}}(0)\geqq 0\) and thus
At this point, let us consider \(\gamma \in (0,1)\) and define the function
which verifies
In this way, by (63) we have
in other words, \(u_\gamma \) solves the problem
where
Moreover
therefore, if we show that there exists \(\gamma \in (0,1)\) such that \(d_\gamma (t)\geqq c(t)\) in [0, T], we can repeat the previous argument and, as in (66), show that for such \(\gamma \)
By (68), such inequality is satisfied if there exists \(\gamma \in (0,1)\) such that, for every \(t\in [0,T]\)
or, equivalently, if
Since the left-hand side is always non-negative, it is enough to find a \(\gamma \in (0,1)\) such that
but such \(\gamma \) clearly exists since \(U''(\vartheta ^*)>0\) and \(U(\vartheta ^*)>0\) and, moreover, does not depends on t. Since now (69) is proved, using (67) we easily deduce that
and, choosing \(C=(1-\gamma )|v_{\xi ^*}|>0\), then (62) is proven, together with the lemma. \(\square \)
Remark 5.11
One could think that the proof of Lemma 5.10 could be concluded with the inequality (66) since, for every \(k\in [-1,1]\)
However, this estimate would not be enough for the purposes of this work, since we need a uniform estimate which does not depend on \(\varepsilon \). On the other hand, the constant \(C=(1-\gamma )|v_{\xi ^*}|\) provided at the end of the lemma depends only on \(\vartheta _0^*\) and so it joins this uniformity and allows us to extend this argument also for the N-centre problem driven by \(V^\varepsilon \) when \(\varepsilon \) is sufficiently small.
As a consequence of Lemma 5.10, of Remark 5.11 and of the uniform behaviour of the dynamical system when \(\varepsilon \) is small and \(p_0\) and \(p_1\) are not far from \(\xi ^*\) (see the discussion below Lemma 5.7), we can obtain the same result for the N-centre problem. Note that here we will refer to the notations of Lemma 5.5 and thus we will consider only the Jacobi length from \(p_0\) to \(p_1\); of course, an equivalent result holds for any pair \((p_{2j},p_{2j+1})\), for \(j=1,\ldots ,n-1\).
Theorem 5.12
There exists \({\bar{\varepsilon }}_{ext}>0\) such that, for any \(\varepsilon \in (0,{\bar{\varepsilon }}_{ext})\), if
is a minimizer of \({\mathbf {L}}\) provided in Lemma 5.2, then there exists \(\psi \in {\mathcal {T}}_{p_0}(\partial B_R)\) and there exists \(C_{ext}>0\) such that
5.2.2 An explicit variation on the internal path
To conclude this section and to finally prove that a minimizer of \({\mathbf {L}}\) is actually an inner point of \({\mathcal {S}}\), we need another preliminary result. Indeed, it is necessary to give an estimate of the final velocity of the inner arc \(y_{int}=y_{int}(p_{2n-1},p_0)\) defined in \([0,T_{0,2n-1}]\), with respect to the tangent space spanned by \(p_0^\perp \). As for the external arc, we are going to provide a result for \(\varepsilon =0\) and then we will extend it for \(\varepsilon \) sufficiently small by uniformity. In order to do this, consider again the notation introduced before the Lemma 5.10. We prove the following result.
Lemma 5.13
There exists \(\delta =\delta (\vartheta ^*),C=C(\vartheta ^*)>0\) such that, for any \(\phi \in {{\mathbb {R}}}\) verifying \(0<|\phi |<\delta \) , the following holds
where \(p_0(\phi )\) follows the notations in (61).
Proof
We have put \(\varepsilon =0\), therefore we are now studying an anisotropic Kepler problem driven by \(W^0\) (see Proposition 2.1) and, in particular, \(y_{int}\) in this setting is exactly one of the collision trajectories studied in [2]. Actually, \(y_{int}\) is a trajectory which emanates from collision; therefore, thanks to the time reversibility, we can consider \(w(t){\mathop {=}\limits ^{.}}y_{int}(T_{0,2n-1}-t)\) which is defined again in \([0,T_{2n-1}]\), starts from \(\partial B_R\) and finishes in collision with the origin (see also Figure 9). For a vector \(y\in {{\mathbb {R}}}^2\) we will denote by \({\widehat{y}}\) its angle with the horizontal axis with respect to the canonical basis of \({{\mathbb {R}}}^2\). As a starting point, without loss of generality we assume \(\phi >0\) (as in the proof of Lemma 5.10) and we note that
and so, since \(|{\dot{w}}(0)|\) and \(|-p_0(\phi )^\perp |\) are far from 0 when \(\phi \rightarrow 0^+\), our proof reduces to study the behaviour of the angles (cf Figure 9). Actually, it is clear that the angle \(\widehat{{\dot{w}}(0)}\) depends on \(\phi \) and, in particular
since the inner arc tends to the collision homothetic motion when \(|\phi |\rightarrow 0^+\). This suggests to follow the approach of [2] and to take into account McGehee coordinates. The change of variables, which of course again depends on \(\phi \), with respect to the trajectory w then reads
On the other hand, since w is a collision solution at energy \(-1\) of the anisotropic Kepler problem driven by \(W^0(w)=r^{-\alpha }U(\vartheta )\), following Section 2 of [2] \((r,\vartheta ,\varphi )\), after a time rescaling, solves
Following again Section 2 of [2], since \(\vartheta ^*\) is such that \(U'(\vartheta ^*)=0\) and \(U''(\vartheta ^*)\), then the triplet \((0,\vartheta ^*,\vartheta ^*+\pi )\) is a hyperbolic equilibrium point for (71) such that:
-
its stable manifold is two-dimensional;
-
the two eigendirections that span its stable manifold are
$$\begin{aligned} \begin{aligned} v_r&=(1,0,0) \\ v^-&=\left( 0,1,\frac{1}{2}+\frac{\alpha }{4}+\frac{1}{4}\sqrt{(2-\alpha )^2 +8\frac{U''(\vartheta ^*)}{U(\vartheta ^*)}}\right) \end{aligned} \end{aligned}$$and the corresponding eigenvalues are
$$\begin{aligned} \begin{aligned} \lambda _r&=-2U(\vartheta ^*)<0 \\ \lambda ^-&=\frac{2-\alpha }{2}U(\vartheta ^*)-\frac{1}{2}\sqrt{(2-\alpha )^2U(\vartheta ^*)^2 +8U(\vartheta ^*)U''(\vartheta ^*)}<0. \end{aligned} \end{aligned}$$
Note that the third component of \(v^-\) is greater than 1. Moreover, by the main result (Theorem 5.2) in [2], we have that \(w=(r,\vartheta ,\varphi )\) belongs to the stable manifold of \((0,\vartheta ^*,\vartheta ^*+\pi )\) and in particular \(\varphi (0)\) is a \({\mathcal {C}}^2\) function of \(\vartheta (0)=\vartheta ^*+\phi \). This is one of consequences of Lemma 3.2 in [2], together with the fact that, when \(\vartheta (0)\rightarrow \vartheta ^*\) in some way, the growth ratio of \(\varphi =\varphi (0)\) as a function of \(\vartheta =\vartheta (0)\) tends to the slope of \(v^-\) projected on \((\vartheta ,\varphi (\vartheta ))\). In other words, recalling that \(\varphi (\vartheta ^*)=\vartheta ^*+\pi \), we have that
and thus,
Now, from (70) and the above limiting behaviour, since \(\vartheta \rightarrow \vartheta ^*\) as \(\phi \rightarrow 0^+\), we have that
To conclude the proof, note that \({\dot{w}}(0)\) is uniformly bounded in \(\phi \) by a constant \(c>0\) which depends on the initial velocity of the homothetic collision motion. Therefore, the proof is concluded choosing the constant
\(\square \)
As we have said, it is possible to extend the previous result for \(\varepsilon \) sufficiently small. Indeed, from Proposition 2.1 we know that the potential \(V^\varepsilon \) converges uniformly to \(W^0\) on every compact set of \({{\mathbb {R}}}^2\setminus \{0\}\); moreover, we have already seen in Lemma 4.19 and Theorem 4.23 that when \(\varepsilon \rightarrow 0^+\), a sequence of minimizers of the Maupertuis’ functional \({\mathcal {M}}\) converges uniformly to a minimizer of the Maupertuis’ functional
As for Theorem 5.12, this is enough for the proof of the next result.
Theorem 5.14
There exists \({\bar{\varepsilon }}_{int}>0\) such that, for any \(\varepsilon \in (0,{\bar{\varepsilon }}_{int})\), if
is a minimizer of \({\mathbf {L}}\) provided in Lemma 5.2, then there exists \(\psi \in {\mathcal {T}}_{p_0}(\partial B_R)\) and there exists \(C_{int}>0\) such that

Situation of Lemma 5.13: the behaviour of the final velocity of an internal arc
5.2.3 Proof of (i) of Theorem 5.3
Define \({\bar{\varepsilon }}{\mathop {=}\limits ^{.}}\min \{{\bar{\varepsilon }}_{ext},{\bar{\varepsilon }}_{int}\}\), with \({\bar{\varepsilon }}_{ext}\) and \({\bar{\varepsilon }}_{int}\) introduced respectively in Theorems 5.12 and 5.14, and take \(\varepsilon \in (0,{\bar{\varepsilon }})\). Assume by contradiction that the minimizer \({\bar{\mathbf{p}}}=(\bar{p}_0\,\bar{p}_1,\ldots ,\bar{p}_{2n})\) of \({\mathbf {L}}\) provided in Lemma 5.2 belongs to the boundary \(\partial S\). To accomplish this absurd hypothesis it is not restrictive to assume that \(\bar{p}_0\in \partial {\mathcal {U}}_0\) and thus to produce a variation on \(\bar{p}_0\) such that the total length \({\mathbf {L}}\) decreases along this variation. This would lead to a contradiction and would conclude the proof.
As a consequence of Theorems 5.12 and 5.14 there exist a variation \(\psi \in {\mathcal {T}}_{p_0}(\partial B_R)\) and a constant \(C>0\) such that
Therefore, the minimality of \({\bar{\mathbf{p}}}\) is in contradiction with the above inequality and thus \({\bar{\mathbf{p}}}\) is necessarily an inner point of \({\mathcal {S}}\).
5.3 Smoothness of the minimizers and existence of the corresponding periodic solutions: proof of (ii) of Theorem 5.3 and of Theorem 1.6
We conclude this section with the proof of the smoothness of the trajectory \(\gamma _{\varepsilon ,{\bar{\mathbf{p}}}}\) and thus we provide the existence of a periodic solution of the anisotropic N-centre problem driven by \(V^\varepsilon \).
Proof of (ii) of Theorem 5.3
Since point (i) of Theorem 5.3 has been proved in the previous paragraph, for \(\varepsilon \in (0,{\bar{\varepsilon }})\) we can consider a minimizer \({\bar{\mathbf{p}}}=(\bar{p}_0,\bar{p}_1,\ldots ,\bar{p}_{2n}) \in \mathring{{\mathcal {S}}}\) for \({\mathbf {L}}\) and now we know that
Again, we can assume \(k=0\) and thus, Lemma 5.5 and Lemma 5.6 give that, for every \(\psi \in {\mathcal {T}}_{p_0}(\partial B_R)\) we have
The tangent space \({\mathcal {T}}_{p_0}(\partial B_R)\) is one-dimensional and it is spanned by a unit vector \(\nu \) which is orthogonal to \(p_0\). Therefore, if we denote by \((\widehat{y,\nu })\) the angle included between the two vectors, we can deduce that
and the conservation of the energy both for \(y_{int}\) and \(y_{ext}\) at the point \(\bar{p}_0\) leads to the equality
This implies that
and thus, since \({\dot{y}}_{int}(T_{\varepsilon ,2n-1})\) and \({\dot{y}}_{ext}(0)\) point outside \(B_R\), we obtain that
This, together with (72), shows that \({\dot{y}}_{int}(T_{\varepsilon ,2n-1})={\dot{y}}_{ext}(0)\) and thus \(\gamma _{\varepsilon ,{\bar{\mathbf{p}}}}\) is \({\mathcal {C}}^1([0,{\mathbf {T}}_\varepsilon ])\).
At this point, we have shown that if \({\bar{\mathbf{p}}}\in \mathring{{\mathcal {S}}}\) is a minimizer of \({\mathbf {L}}\), then the corresponding periodic trajectory \(\gamma _{\varepsilon ,{\bar{\mathbf{p}}}}(t)\) is a classical solution of the N-centre problem (49) at energy -1 when \(t\in [0,{\mathbf {T}}_{\varepsilon }]\setminus \{0,T_{\varepsilon ,0},\ldots ,T_{\varepsilon ,2n-1}\}\) and it is a \({\mathcal {C}}^1\) function in \([0,{\mathbf {T}}_\varepsilon ]\). Since the junctions on \(\partial B_R\) are smooth, we can extend the trajectory \(\gamma _{\varepsilon ,{\bar{\mathbf{p}}}}\) by \({\mathbf {T}}_\varepsilon \)-periodicity to all \({{\mathbb {R}}}\). To conclude the proof of Theorem 5.3 we need to show that \(\gamma _{\varepsilon ,{\bar{\mathbf{p}}}}\) is \({\mathcal {C}}^2({{\mathbb {R}}})\). In order to do that, let us consider again the solution arcs \(y_{int}\) and \(y_{ext}\) which glue on the point \(\bar{p}_0\) (the same argument applies for all the other building blocks) and let us compute
This shows that \(\gamma _{\varepsilon ,{\bar{\mathbf{p}}}}\in {\mathcal {C}}^2({{\mathbb {R}}})\) and concludes the proof of Theorem 5.3. \(\square \)
At this point, it remains to show that the existence of multiple periodic solutions holds also for the original N-centre problem, that is, the problem
where V is the potential referred to the original centres \(c_1,\ldots ,c_N\) (see (4)) and h has to be chosen small enough. We recall that the multiplicity of periodic solutions for problem (73) is determined both by a choice of a partition of the centres and by a minimal non-degenerate central configuration for \(W^0\). As we have already discussed in the introduction of this paper, we can describe all the possible behaviours of a periodic solution choosing a finite sequence of elements in the set
We need to link a sequence of n elements in \({\mathcal {Q}}\) with a double sequence, composed by n partitions and n minimal non-degenerate central configurations of \(W^0\). This can be done using Remark 1.5, which yields the following correspondence
with \(j_k=l_km+r_k\), for \(l_k\in \{0,\ldots ,2^{N-1}-2\}\), \(r_k\in \{0,\ldots ,m-1\}\), and thus \(j_k\in \{0,\ldots ,m(2^{N-1}-1)-1\}\). Finally, it is useful to characterize a solution provided in Theorem 5.3 with respect to its dependence on \(P_{l_k}\) and \(\vartheta _{r_k}\). Once \(n\geqq 1\) and \(\varepsilon \in (0,{{\bar{\varepsilon }}})\) are fixed, we have a periodic solution \(\gamma _{\varepsilon ,{\bar{\mathbf{p}}}}\), with \({\bar{\mathbf{p}}}=(\bar{p}_0,\ldots ,\bar{p}_{2n})\in \mathring{{\mathcal {S}}}\). Actually, it is clear from the way it has been built that this solution depends on a choice of n partitions and n minimal non degenerate central configurations, that is,
Proof of Theorem 1.6
First of all, from Proposition 2.1, in order to obtain a solution of (73) as a rescaling of a solution of the problem driven by \(V^\varepsilon \) at energy \(-1\), the energy h has to be in \((0,\bar{h})\), with \(\bar{h}{\mathop {=}\limits ^{.}}{\bar{\varepsilon }}^\alpha \) and \({\bar{\varepsilon }}>0\) is the one defined in Theorem 5.3. Moreover, when such h is fixed, a unique \(\varepsilon =h^{1/\alpha }\) is determined such that \(B_\varepsilon \) contains all the scaled centres, as well as a ball \(B_R\) which is included in the Hill’s region of \(V^\varepsilon \) and that allows to build periodic solutions for the \(\varepsilon \)-problem (as in (14), replacing \({\tilde{\varepsilon }}\) with \({\bar{\varepsilon }}\)). To such R, via Proposition 2.1, we can associate a radius \(\bar{R}{\mathop {=}\limits ^{.}}h^{-1/\alpha }R>0\) which plays the same role for problem (73). Therefore, again by Proposition 2.1 and Remark 1.5, when \(n\geqq 1\) and \((Q_{j_0},\ldots ,Q_{j_{n-1}})\in {\mathcal {Q}}^n\) are fixed, we can define the function \(x=x(Q_{j_0},\ldots ,Q_{j_{n-1}};h)\) as the rescaling via h of the solution \(\gamma (\varepsilon ;P_{l_0},\ldots ,P_{l_{n-1}};\vartheta _{r_0}^*,\ldots ,\vartheta _{r_{n-1}}^*)\), with the rule
This x will be clearly a classical and periodic solution of problem (73) that crosses 2n-times the circle \(\partial B_{\bar{R}}\) in chosen neighbourhoods of the points \(\bar{R}e^{i\vartheta _{r_k}^*}\). \(\square \)
6 Construction of a symbolic dynamics
In this final section we apply the results obtained in the previous ones in order to prove the existence of a symbolic dynamics for the anisotropic N-centre problem. In particular, we will firstly see that the multiplicity of periodic trajectories found in Theorem 1.6 allows to prove the existence of a collision-less symbolic dynamics as stated in Theorem 1.7. Exploiting similar techniques, such result will be obtained both for collision-orbits (Theorem 1.4) and for the anisotropic 2-centre problem with a unique minimal non degenerate central configuration (Theorem 1.8).
6.1 Collision-less symbolic dynamics, proof of Theorem 1.7
To start with, we recall that N is the number of the centres, while m represents the number of minimal non-degenerate central configurations for the leading potential \(W^0\) far from the singularity. We assume that \(N\geqq 3\) and \(m\geqq 1\) or, equivalently, that \(N\geqq 2\) and \(m\geqq 2\), and we require again hypotheses (V)–(\(V_\alpha \)) on the potential V (see Remark 1.5). Moreover, we fix \(h\in (0,\bar{h})\), where the threshold \(\bar{h}\) has been determined in the previous section. By means of Theorem 1.6 we have that, for any \(n\geqq 1\) and for any finite sequence \((Q_{j_0},\ldots ,Q_{j_{n-1}})\subseteq {\mathcal {Q}}^n\), there exists a classical periodic solution \(x=x(Q_{j_0},\ldots ,Q_{j_{n-1}};h)\) of the equation \(\ddot{x}=\nabla V(x)\) at energy \(-h\) and there exists \(\bar{R}=\bar{R}(h)>0\) such that the solution x crosses the circle \(\partial B_{\bar{R}}\) 2n-times in one period at the instants \((t_{k})_{k=0}^{2n-1}\). In particular, for any \(k=0,\ldots ,n-1\) there exists a neighbourhood \({\mathcal {U}}_{r_k}{\mathop {=}\limits ^{.}}{\mathcal {U}}(\bar{R}e^{i\vartheta _{r_k}^*})\) on \(\partial B_{\bar{R}}\) such that, if we define \(x_{k}{\mathop {=}\limits ^{.}}x(t_k)\), we have that
-
when \(t\in (t_{2k},t_{2k+1})\) the solution stays outside \(B_{\bar{R}}\) and
$$\begin{aligned} x_{2k},\, x_{2k+1}\in {\mathcal {U}}_{r_k} \end{aligned}$$ -
in the interval \((t_{2k+1},t_{2k+2})\) (we clearly set \(t_{2n}{\mathop {=}\limits ^{.}}t_0\) to close the trajectory) the solution stays inside \(B_{\bar{R}}\), it separates the centres according to the partition \(P_{l_k}\) and
$$\begin{aligned} x_{2k+2}\in {\mathcal {U}}_{r_{k+1}}, \end{aligned}$$
keeping in mind the correspondence
We recall that this piecewise solution has been determined with several steps in the previous sections, working with a normalized version of the N-centre problem, driven by \(V^\varepsilon \). In the same way, thanks to Theorem 3.10, Theorem 4.25 and Proposition 2.1, we can distinguish between the solution arcs outside and inside \(B_{\bar{R}}\) in this way:
-
we denote by \(x_{ext}(\cdot ;x_{2k},x_{2k+1};h)\) the piece of outer solution which connects \(x_{2k}\) and \(x_{2k+1}\), defined on its re-parametrized interval \([0,T_{ext}(x_{2k},x_{2k+1};h)]\);
-
we denote by \(x_{P_{j_k}}(\cdot ;x_{2k+1},x_{2k+2};h)\) the piece of inner solution which connects \(x_{2k+1}\) and \(x_{2k+2}\) and separates the centres with respect to the partition \(P_{l_k}\), defined, up to reparametrizations, on the interval \([0,T_{P_{j_k}}(x_{2k+1},x_{2k+2};h)]\).
We recall that the inner arc for the \(\varepsilon \)-problem has been determined as a re-parametrization of a minimizer of the Maupertuis’ functional in Section 4. On the other hand, we know that the Maupertuis’ principle (Theorem 4.1) joins also a vice-versa, that is, if we set \(\omega (x_{2k+1},x_{2k+2};h){\mathop {=}\limits ^{.}}1/T_{P_{j_k}}(x_{2k+1},x_{2k+2};h)\), the function
will be a critical point of the Maupertuis’ functional \({\mathcal {M}}_h\) at a positive level, in a suitable space. In particular, we can introduce the set of \(H^1\)-paths
and its \(H^1\)-closure
Now, recalling that in the \(\varepsilon \)-problem we have studied the existence of inner solutions inside \(B_R\), with \(R=h^{1/\alpha }\bar{R}\), for any \(p_{2k+1},p_{2k+2}\in \partial B_R\) we can consider the points \(x_{2k+1}=h^{-1/\alpha }p_{2k+1}\), \(x_{2k+2}=h^{-1/\alpha }p_{2k+2}\in \partial B_{\bar{R}}\). Moreover, we recall the analogue of the space defined above in the \(\varepsilon \)-context, that is, the spaces \({\hat{H}}_{p_{2k+1},p_{2k+2}}([0,1])\) and \(H_{p_{2k+1},p_{2k+2}}([0,1])\) introduced in Section 4 and we consider the bijective map
such that \(J(u)=h^{1/\alpha }u\), for any \(u\in H_{p_{2k+1},p_{2k+2}}([0,1])\). It is clear that the topological behaviour of an arc in \(H_{p_{2k+1},p_{2k+2}}([0,1])\) with respect to the centres \(c_j'\) naturally translates on the same behaviour for its image through J with respect to the centres \(c_j\). In light of this, for any \(P_j\in {\mathcal {P}}\), we recall the definition (46) of the minimization space \({\hat{K}}_{P_j}^{p_1,p_2}\) and its \(H^1\)-closure \(K_{P_j}^{p_1,p_2}\), and we set
Now, since the inner arc \(y_{int}(\cdot ;p_{2k+1},p_{2k+2};\varepsilon )\) with respect to the partition \(P_j\) provided in Theorem 4.25 re-parametrizes a minimizer of the Maupertuis functional in \(K_{P_j}^{p_{2k+1},p_{2k+2}}([0,1])\), we can immediately conclude that \(v_{P_j} (\cdot ;x_{2k+1},x_{2k+2};h)\) will be a minimizer of the Maupertuis’ functional \({\mathcal {M}}_h\) in \({\mathcal {K}}_{P_j}^{x_{2k+1},x_{2k+2}}([0,1])\).
The rest of this section is devoted to the proof of Theorem 1.7 as a consequence of Theorem 1.6, that is, to prove the existence of a symbolic dynamics with set of symbols \({\mathcal {Q}}\). For this reason, we start with the definition of a suitable subset \(\Pi _h\) of the energy shell
which is a 3-dimensional submanifold of \({{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\})\times {{\mathbb {R}}}^2\) and it is invariant for the flow \(\Phi ^t\) induced by the vector field
As a starting point, for a neighbourhood \({\mathcal {U}}_r={\mathcal {U}}(\bar{R}e^{i\vartheta _r^*})\) provided in Theorem 1.6 (\(r=0,\ldots ,m-1\)), we define the sets of pairs (x, v) such that \(x\in {\mathcal {U}}_r\) and v is not tangent to the same circle, that is,
We note that for a pair in \({\mathcal {E}}_{h,\bar{R},r}^+\) the velocity points towards the outer of \(B_{\bar{R}}\) (the converse holds for \({\mathcal {E}}_{h,\bar{R},r}^-\)) and that both sets are included in the 2-dimensional inertial surface
Therefore, it is clear that, if we consider the restriction \(F_h{\mathop {=}\limits ^{.}}F|_{{\mathcal {E}}_h}\) of the vector field, it is transverse to \({\mathcal {E}}_{h,\bar{R},r}^+\) (for more details we refer to Section 3).
For every \((x,v)\in {\mathcal {E}}_{h,\bar{R},r}^+\) we introduce the sets
and the sets
Note that in general the sets \({\mathbb {T}}^\pm (x,v)\) could be empty, since the piece of trajectory which starts in a neighbourhood \({\mathcal {U}}_r\) and points towards the outer of \(B_{\bar{R}}\) needs to have an initial velocity v which satisfies a behaviour well described in Lemma 5.10. Beside that, note that Theorem 1.6 ensures that the sets \(\left( {\mathcal {E}}_{h,\bar{R},r}^+\right) ^\pm \) are non-empty, since the theorem provides periodic solutions of the equation \(\ddot{x}=\nabla V(x)\) that cross the circle \(\partial B_{\bar{R}}\) an infinite number of times, exactly inside the neighbourhoods \({\mathcal {U}}_r\), in which the transversality condition \(\langle {\dot{x}},x\rangle \gtrless 0\) is clearly satisfied. Moreover, the continuous dependence on initial data, together with the transversality of \({\mathcal {E}}_{h,\bar{R},r}^+\) with respect to the vector field F guarantee that the set \(\left( {\mathcal {E}}_{h,\bar{R},r}^+\right) ^+\)is open. At this point, for \((x,v)\in \left( {\mathcal {E}}_{h,\bar{R},r}^+\right) ^+\) we define
while for \(x\in \left( {\mathcal {E}}_{h,\bar{R},r}^+\right) ^-\) we set
If we take \((x,v)\in \left( {\mathcal {E}}_{h,\bar{R},r}^+\right) ^+\cap \left( {\mathcal {E}}_{h,\bar{R},r}^+\right) ^-\) such that \(T_{\mathrm{min}}^-(x,v)<T_{\mathrm{min}}^+(x,v)\), we can consider the piece of the orbit emanating from (x, v) between the first two instants in which it crosses again \(\partial B_{\bar{R}}\) in two of the admissible neighbourhoods, which is exactly the following restriction of the flow
where we have omitted the dependence on (x, v) to ease the notations (see Figure 10).

This picture illustrates the notations introduced above. Indeed, we have drawn in bold the velocity vectors associated to every position in the configuration space, so that it is possible to visualize the flow associated to an initial data \(\varvec{(x,v)}\in \left( {\mathcal {E}}_{h,\bar{R},r}^+\right) ^+\cap \left( {\mathcal {E}}_{h,\bar{R},r}^+\right) ^-\). In particular, the blue arc represents the projection on the configuration space of the restriction of the flow between \(T_\text {min}^-\) and \(T_\text {min}^+\)
Recalling the set of symbols
and recalling that \(\pi _x\Phi ^t(x,v)\) denotes the projection on the first component of the flow, let us now define the set
The above set is non-empty since Theorem 1.6 proves the existence of periodic solutions for the N-centre problem, which then identify an infinite number of points that belong to the set \({\mathcal {E}}_{h,\bar{R}}^{\mathcal {Q}}\). Indeed, the x-components of these points are nothing but the crosses that the periodic trajectories make on the circle \(\partial B_{\bar{R}}\) when they start their motion outside the ball. We can then define a first return map on \({\mathcal {E}}_{h,\bar{R}}^{\mathcal {Q}}\) in this way
which is continuous as a consequence of our construction. Moreover, we can also define another map \(\chi :{\mathcal {E}}_{h,\bar{R}}^{\mathcal {Q}}\rightarrow {\mathcal {Q}}\) such that
We can finally define the set \(\Pi _h\) in this way
which is exactly the set of all the possible initial data which generate solutions that cross the circle \(\partial B_{\bar{R}}\) an infinite number of time having velocity directed toward the exterior of \(B_{\bar{R}}\); moreover, each of these solutions, every time that travels inside \(B_{\bar{R}}\), draws a partition \(P_l\) of the centres for some l and minimizing the Maupertuis’ functional in the corresponding space \({\hat{\mathcal {K}}}_{P_l}\). To conclude this preliminary discussion we define also the application \(\pi \) which maps every one of this initial data to its corresponding bi-infinite sequence of symbols, that is,
we also introduce the restriction of the first return map to the invariant submanifold \(\Pi _h\) as \({\mathfrak {R}}{\mathop {=}\limits ^{.}}{\mathcal {R}}|_{\Pi _h}\). At this point, we proceed with the proof of Theorem 1.7, that is, we need to prove that the map \(\pi \) that we have just defined is surjective and continuous. In order to do that, we need to prove some preliminary property on the pieces of solutions. The first one consists on showing that their definition intervals are uniformly bounded from above and from below.
Lemma 6.1
There exist two constants \(c,C>0\) such that, for any \(x_0,x_1\in \partial B_{\bar{R}}\) for which \(x_{ext}(\cdot ;x_0,x_1;h)\) exists, for any \(x_2,x_3\in \partial B_{\bar{R}}\) and for any \(P_j\in {\mathcal {P}}\) for which \(x_{P_j}(\cdot ;x_2,x_3;h)\) exists, we have
Proof
Lemma 3.11 and Lemma 4.26 provide such uniform bounds for the \(\varepsilon \)-problem; the conclusion is then a direct consequence of Proposition 2.1. \(\square \)
We also need a compactness lemma on sequences of minimizers of \({\mathcal {M}}_h\) which separate the centres with respect to the same partition. In particular, we want to prove that if the endpoints of the minimizers converge to a limit pair \((\bar{x}_2,\bar{x}_3)\) then the limit path is itself a minimizer of \({\mathcal {M}}_h\) in the space \({\hat{\mathcal {K}}}_{P_j}^{\bar{x}_2,\bar{x}_3}([0,1])\), for a fixed partition \(P_j\).
Lemma 6.2
Let \((x_2^n)\subseteq {\mathcal {U}}_2\) and \((x_3^n)\subseteq {\mathcal {U}}_3\) such that \((x_2^n,x_3^n)\rightarrow (\bar{x}_2,\bar{x}_3)\), with \(\bar{x}_2\in {\mathcal {U}}_3\) and \(\bar{x}_3\in {\mathcal {U}}_3\), where \({\mathcal {U}}_2\) and \({\mathcal {U}}_3\) are the neighbourhoods of two minimal non-degenerate central configurations of \(W^0\) on \(\partial B_{\bar{R}}\) which guarantee the existence of the internal arcs. Fix also a partition \(P_j\in {\mathcal {P}}\) and let \(v_n\) be a minimizer of \({\mathcal {M}}_h\) in the space \({\hat{\mathcal {K}}}_{P_j}^{x_2^n,x_3^n}([0,1])\). Then, there exists a subsequence \((v_{n_k})\) of \((v_n)\) and a minimizer \(\bar{v}\) of \({\mathcal {M}}_h\) in the space \({\hat{\mathcal {K}}}_{P_j}^{\bar{x}_2,\bar{x_3}}([0,1])\) such that
Proof
An analogous compactness property has been proved for sequences of minimizers of \({\mathcal {M}}_{-1}\) in the \(\varepsilon \)-problem in Lemma 4.19 and Theorem 4.23. Again, Proposition 2.1 gives the proof. \(\square \)
We are now ready to give the proof of Theorem 1.7 which follows the same technique employed in [39].
Proof of Theorem 1.7
Surjectivity of \(\varvec{\pi }:\) Consider a bi-infinite sequence \((Q_{j_n})_{n\in {{\mathbb {Z}}}}\subseteq {\mathcal {Q}}^{{{\mathbb {Z}}}}\) and the sequence of finite sequences
If we fix \(h\in (0,\bar{h})\), through Theorem 1.6 we can associate to each of these sequence a corresponding periodic solution; this will be made using this notation that takes into account the length of the finite sequence
Without loss of generality, we can define \((x^n(0),{\dot{x}}^n(0))\in \Pi _h\) as the initial data such that the first symbol determined by \(x^n\) is \(Q_{j_0}\), for every \(n\in {{\mathbb {N}}}\). In particular, we know that \(j_0=l_0m+r_0\) and thus this symbol will refer to a first piece of solution, composed by an outer arc with endpoints in the neighbourhood \({\mathcal {U}}_{r_0}\) and inner arc that agrees with the partition \(P_{l_0}\) and that arrives in the neighbourhood \({\mathcal {U}}_{r_1}\). In this way, for every n we can find a sequence of points \((x_k^n)_{k\in {{\mathbb {Z}}}}\subseteq \partial B_{\bar{R}}\) which correspond to the crosses of the periodic trajectory \(x^n\) with the circle \(\partial B_{\bar{R}}\). Note that since the trajectory is periodic, the sequence of points will be periodic too. We can now take into account the sequence of sequences
in order to start a diagonal process that will imply a convergence on these sequences. If we fix \(k=0\), since \(\partial B_{\bar{R}}\) is compact we can extract a subsequence \((x_0^{n_0})_{n_0\in {{\mathbb {N}}}}\) such that \(x_0^{n_0}\rightarrow \bar{x}_0\) when \(n_0\rightarrow +\infty \). In the same way, we can fix \(k=1\) and consider the subsequence \((x_1^{n_0})_{n_0\in {{\mathbb {N}}}}\subseteq \partial {B_{\bar{R}}}\) and extract a sub-subsequence \((x_1^{n_1})_{n_1\in {{\mathbb {N}}}}\) such that \(x_1^{n_1}\rightarrow \bar{x}_1\) as \(n_1\rightarrow +\infty \). This can be made for every \(k\in {{\mathbb {Z}}}\), in order to find a subsequence \((x_k^{n_k})_{n_k\in {{\mathbb {N}}}}\) such that \(x_k\rightarrow \bar{x}_k\) as \(n_k\rightarrow +\infty \). At this point we can consider the diagonal sequence \((x_k^{n_n})_{n\in {{\mathbb {N}}}}\) and relabel it as \((x_k^n)_{n\in {{\mathbb {N}}}}\), so that
Note that all these limit points belong to \(\partial B_{\bar{R}}\) so that we can connect two of them with an inner or outer arc; this would actually require that the points are inside the neighbourhoods \({\mathcal {U}}_{r_k}\) found in Theorem 1.6, but up to restrict these neighbourhoods we can repeat the previous argument so that the limits would still be inside a neighbourhood in which the existence is guaranteed. Once this is clear, we can connect the points \(\bar{x}_{2k},\bar{x}_{2k+1}\in {\mathcal {U}}_{r_k}\) with a unique outer arc using the technique illustrated in Theorem 3.10; we can also connect the point \(\bar{x}_{2k+1}\in {\mathcal {U}}_{r_k}\) and the point \(\bar{x}_{2k+2}\in {\mathcal {U}}_{r_{k+1}}\) following the procedure of Theorem 4.25 so that the induced path would separate the centres according to the partition \(P_{l_k}\). Repeating this procedure for every \(k\in {{\mathbb {Z}}}\) we can glue together all these pieces to obtain a continuous function \(\bar{x}:{{\mathbb {R}}}\rightarrow :{{\mathbb {R}}}^2\), using the same technique provided in Section 5. We point out that \(\bar{x}\) is not unique, since the inner pieces, coming from Maupertuis’ minimizers, are not unique. In the following, we are going to show that \(\bar{x}\) is a classical periodic solution of the equation \(\ddot{x}=\nabla V(x)\) and verifies
If we introduce the set of collision instants of \(\bar{x}\) as
due to the nature of the sequence \((x^n)\) it is enough to show that \(x^n\rightarrow \bar{x}\) in a \({\mathcal {C}}^2\) manner on every compact subset of \({{\mathbb {R}}}\setminus T_c(\bar{x})\). To start with, note that if we take \([a,b]\subseteq {{\mathbb {R}}}\) such that \(\bar{x}(a)=\bar{x}_{2k}\) and \(\bar{x}(b)=\bar{x}_{2k+1}\), then the outer arc connecting these two points depends on a continuous manner on the endpoints (see Theorem 3.10) and so \(x^n\rightarrow \bar{x}\) uniformly on [a, b]. Moreover, if we take \([c,d]\subseteq {{\mathbb {R}}}\) such that \(\bar{x}(c)=\bar{x}_{2k+1}\) and \(\bar{x}(d)=\bar{x}_{2k+2}\), then the uniform convergence on [c, d] is a straightforward consequence of Lemma 6.2. This convergence also determines a unique choice for the inner solution that connects \(\bar{x}_{2k+1}\) and \(\bar{x}_{2k+2}\), so that now the function \(\bar{x}\) is uniquely determined. Moreover, since the internal arcs provided in Theorem 4.25 have a uniform distance \(\delta \) from the centres, this actually proves that the uniform convergence of \(x^n\) to \(\bar{x}\) takes place in \({{\mathbb {R}}}\setminus T_c(\bar{x})\), that is, \(\bar{x}\) has no collision with the centres.
At this point, the function \(\nabla V(\bar{x}(\cdot ))\) is continuous on the whole \({{\mathbb {R}}}\) and, since \(x^n\) is a \({\mathcal {C}}^2\) solution of the equation \(\ddot{x}=\nabla V(x)\) by the uniform convergence of \(x^n\) to \(\bar{x}\) on [a, b] we have that
for every \(t\in [a,b]\). This means that the sequence \(({\dot{x}}^n(t))\) is equi-continuous in [a, b]; moreover, the energy equation implies that
for every \(t\in [a,b]\) and for every \(n\in {{\mathbb {N}}}\), that is, the sequence \(({\dot{x}}^n(t))\) is also equi-bounded in [a, b]. This fact, together with the uniform convergence, finally shows that the sequence \((x^n(t))\) \({\mathcal {C}}^2\)-converges to \(\bar{x}(t)\) in [a, b], for every compact set \([a,b]\subseteq {{\mathbb {R}}}\). As a consequence, \(\bar{x}\) is a \({\mathcal {C}}^2\) solution of the equation \(\ddot{x}=\nabla V(x)\) at energy \(-h\) on every compact set of \({{\mathbb {R}}}\). As a final remark, note that the uniform convergence also implies the conservation of the topological constraint, that is, the piece of \(\bar{x}\) between the points \(x_{2k+1}\) and \(x_{2k+2}\) will separate the centres with respect to \(P_{l_k}\). This finally proves that \(\pi ((\bar{x}(0),\dot{\bar{x}}(0)))=(Q_{j_k})_{k\in {{\mathbb {Z}}}}\), where \(j_k=l_km+r_k\).
Continuity of \(\varvec{\pi }\): We recall that we can endow the set of bi-infinite sequences \({\mathcal {Q}}^{{\mathbb {Z}}}\) with the distance
where \(\rho \) is the discrete metric defined through the Kronecker delta. Moreover, for every \(m\in {{\mathbb {Z}}}\) we define the map
that is, it associates to (x, v) the symbol corresponding to the m-th piece (composed by an outer arc and an inner arc) of the solution with initial data (x, v). Given this, if we fix \((x_0,v_0)\in \Pi _h\), we need to show that for \(\lambda >0\) there exists \(\delta >0\) such that
It is clear that we can find \(m_0\in {{\mathbb {N}}}\) such that
For this reason and for the definition of the metric d in the space \(({\mathcal {Q}},d)\), in order to prove (74) it is enough to show that two initial data sufficiently close are mapped through \(\pi _m\) to the same symbol \(Q_m\), for any \(m\in \{-m_0,\ldots ,m_0\}\). Therefore to (74) it is equivalent to prove that, for any \(m_0\in {{\mathbb {N}}}\) there exists \(\eta >0\) such that
If we take \(m_0\in {{\mathbb {N}}}\), by means of Lemma 6.1 there exists a time interval \([-a,a]\) such that every solution with initial data in \(\Pi _h\) detects at least \(2m_0+1\) symbols in \([-a,a]\), that is, it determines at least \(4m_0+2\) crosses on \(\partial B_{\bar{R}}\). Moreover, the solution which emanates from the initial data \((x_0,v_0)\) is collision-free and its projection on the x-component has a uniform distance \(\delta >0\) from the centres (see Theorem 4.25), that is,
recalling that \(\pi _x\) denotes the projection on the x-component of the flow. At this point, if (x, v) is sufficiently close to \((x_0,v_0)\), the continuous dependence on initial data implies that
for every \(t\in [-a,a]\). This fact ensures that the flow associated to (x, v) determines the same \(2m_0+1\) symbols of the flow associated to \((x_0,v_0)\) so that, in particular
The proof is then concluded. \(\square \)
6.2 Collisional symbolic dynamics, proof of Theorem 1.4
We assume that \(N\geqq 2\) and \(m\geqq 2\) and we consider a potential \(V\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\})\) satisfying hypothesis (V), that we recall here for the readers convenience

In order to treat a more general case, we have dropped hypothesis (\(V_\alpha \)), which, as it has been clear from Section 4, is crucial only in order to obtain collision-less periodic solutions. In this way, collisions with the centres may occur, but this does not prevent to build periodic solutions nor to show that a symbolic dynamics exists. Clearly, slight modifications of the previous proofs are in order and the most relevant change reveals to concern the number of symbols. We recall that collision-less periodic solutions for the anisotropic N-centre problem have been found in Section 5 as a juxtaposition of outer and inner solution arcs, provided respectively in Section 3 and Section 4. No changes are involved with respect to the outer dynamics, since, when a solution arc travels outside a ball containing the centres, collisions can not exist. For this reason, the results on outer solution arcs provided in Section 3 (Theorem 3.10 and Lemma 3.11) are valid also in this context. A different situation shows up concerning the inner dynamics since, due to the possible presence of collisions with the centres, Theorem 4.25 or, equivalently, Theorem 4.24 do not hold. Beside that, we can provide a result which guarantees the existence of possible colliding solution arcs which connect two points which belongs to the neighbourhoods of two minimal non-degenerate central configurations of \(W^0\) on \(\partial B_R\) as a collisional counterpart of Theorem 4.25–4.24. Following the notations of Section 4 (in particular, we refer to (46)–(36)), given \(R>0\) as in Theorem 4.25–4.24, we define the set of all the \(H^1\) possible colliding paths connecting two points \(p_1,p_2\in \partial B_R\) as
With these notations, the following result on the existence of possibly colliding internal solution arcs holds (cf. Theorem 4.25–4.24).
Lemma 6.3
Assume that \(N\geqq 2\), \(m\geqq 2\) and consider a function \(V\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\})\) defined as in (4) and satisfying (V). Fix \(R>0\) as in (14). Then, there exist \(\varepsilon _{int}>0\) such that, for any \(\vartheta ^*,\vartheta ^{**}\in \Xi \) minimal non degenerate central configurations for \(W^0\), defining \(\xi ^*{\mathop {=}\limits ^{.}}Re^{i\vartheta ^*},\xi ^{**}{\mathop {=}\limits ^{.}}Re^{i\vartheta ^{**}}\in \partial B_R\), there exist two neighbourhoods \({\mathcal {U}}_{\xi ^*},{\mathcal {U}}_{\xi ^{**}}\) on \(\partial B_R\) with the following property:
for any \(\varepsilon \in (0,\varepsilon _{int})\), for any pair of endpoints \(p_1\in {\mathcal {U}}_{\xi ^*}\), \(p_2\in {\mathcal {U}}_{\xi ^{**}}\), given the potential \(V^\varepsilon \) defined in (8), there exist \(T>0\), a possibly empty set \(T_c(y)\subseteq [0,T]\) and a possibly colliding solution \(y\in K^{p_1,p_2}([0,T])\) of the inner problem
In particular, the set \(T_c(y)\) is the set of collision instants of y, it is discrete and finite. Moreover, the solution y is a re-parametrization of a minimizer of the Maupertuis’ functional in the space \(K^{p_1,p_2}([0,1])\).
Proof
The proof of the existence of such solution y, together with the conservation of the energy, is a consequence of Proposition 4.7, Theorem 4.1 and Lemma 4.8. Theorem 4.23 applies also in this context and provides the confinement \(|y|<R\). The characterization of the set \(T_c(y)\) is given in Lemma 4.9. \(\square \)
Proceeding exactly as in Section 5, this time without taking care of collisions with the centres, we can now state the collisional counterpart of Theorem 1.6.
Theorem 6.4
Assume that \(N\geqq 2\) and \(m\geqq 2\). Consider a function \(V\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{c_1,\ldots ,c_N\})\) satisfying (V). There exists \(h^*>0\) such that, for every \(h\in (0,h^*)\), \(n\in {{\mathbb {N}}}_{\geqq 1}\) and \((\vartheta _{j_0}^*,\ldots ,\vartheta _{j_{n-1}}^*)\in \Xi ^n\), there exists a periodic possibly colliding solution \(x=x(\vartheta _{j_0}^*,\ldots ,\vartheta _{j_{n-1}}^*;h)\) of the equation \(\ddot{x}=\nabla V(x)\) with energy \(-h\) with the following properties:
-
x satisfies the equation \(\ddot{x}=\nabla V(x)\) and the energy equation \(\frac{1}{2}|{\dot{x}}|^2-V(x)=-h\) almost everywhere in one period;
-
there exists \(R^*=R^*(h)>0\) such that the solution x crosses 2n times the circle \(\partial B_{R^*}\) in one period, at times \((t_s)_{s=0}^{2n-1}\) in such a way that, for any \(k=0,\ldots ,n-1\):
-
in the interval \((t_{2k},t_{2k+1})\) the solution stays outside \(B_{R^*}\) and there exists a neighbourhood \({\mathcal {U}}_{j_k}={\mathcal {U}}(R^* e^{i\vartheta _{j_k}^*})\) on \(\partial B_{R^*}\) such that
$$\begin{aligned} x(t_{2k}),x(t_{2k+1})\in {\mathcal {U}}_{j_k}; \end{aligned}$$ -
in the interval \((t_{2k+1},t_{2k+2})\) the solution stays inside \(B_{R^*}\) and may collide with the centres \(c_1,\ldots ,c_N\).
-
Proof
The proof goes exactly as the proof of Theorem 1.6 (see Section 5 and in particular the proof of Theorem 1.6), this time using Lemma 6.3 in place of Theorem 4.25. Note indeed that the glueing technique of Section 5 becomes actually easier in this case since Lemma 6.3 does not involve the partitions of the centres. \(\square \)
At this point, we are left to show that this dynamical system admits a symbolic dynamics and thus to prove Theorem 1.4. In order to do that and in light of Theorem 6.4, we introduce the set of symbols
which is exactly the set of minimal non-degenerate central configurations for \(W^0\). This is not surprising, since we have provided inner arcs with a minimization process in the space \(K^{p_1,p_2}\) that has no topological constraint involving partitions nor winding numbers. Therefore, the only way to distinguish sequences of inner and outer arcs is to switch from a strictly minimal non-degenerate central configuration to another. At this point, a completely analogous proof to the one given in Section 6.1 allows to prove Theorem 1.4, once the Bernoulli right shift is defined over \({\mathcal {S}}^{{\mathbb {Z}}}\) in this way
this time making use of Theorem 6.4.
Remark 6.5
We conclude this treatment with a brief remark concerning the number of symbols. The set \(K^{p_1,p_2}\), over which we found inner solution arcs of Lemma 6.3, is exactly the weak \(H^1\)-closure of the set
which actually contains all the possible \(H^1\) collision-less paths considered in Theorem 4.25–4.24. This means that, in this context, we are no more forcing a path to separate the centres with respect to a prescribed partition or, equivalently, to a vector of winding numbers. The reader may object that this selection of paths could be too much raw, because one for instance could choose a partition \(P_j\) (or, equivalently, a winding vector l) and work in the closure \(K_{P_j}^{p_1,p_2}\) (eq., \(K_l^{p_1,p_2}\)). Nonetheless, it could happen that the minimizer found in \(K_{P_j}^{p_1,p_2}\) may collide with all the centres and this fact would destroy the topological constraint. As a result, the alphabet involved in Section 6.1 is no more suitable in this context and the only actual distinction resides in the choice of at least two elements \(\vartheta ^*,\vartheta ^{**}\) of \(\Xi \), to which corresponds the juxtaposition of an inner (Lemma 6.3) and an outer (Theorem 3.10) solution arc.
6.3 Case \(N=2\), \(m=1\), proof of Theorem 1.8
In conclusion, we analyse the case of the 2-centre problem, in which the potential with the smallest homogeneity degree \(\alpha \) has a unique minimal non-degenerate central configuration \(\vartheta ^*\in \Xi \). Clearly, it could happen that the sum potential V itself is \(-\alpha \)-homogeneous, but this case would not change the proof. Our final aim is to provide a topological semi-conjugation of this dynamical system with a suitable shift space. Note that in this case the partition set is a singleton and thus it does not fit as an alphabet. For this reason, we consider as symbols the two centres \(c_1,c_2\) and therefore, we introduce the alphabet
Since we are dealing with a unique minimal non-degenerate central configuration \(\vartheta ^*\in \Xi \), it makes sense to assume \(\vartheta ^*=0\). Given \(R>0\) as in (14), we define an open neighbourhood \({\mathcal {U}}\) on \(\partial B_R\) of \(\vartheta ^*\) as the biggest neighbourhood such that, given the extremal points \(p_{min}\) and \(p_{max}\) of \({\mathcal {U}}\), the area between the arc on \(\partial B_R\) and the chord which connect \(p_{min}\) and \(p_{max}\) does not contain the centres \(c_1,c_2\) (see Figure 11).

The neighbourhood \({\mathcal {U}}\) of the unique central configuration \(\vartheta ^*\)
For two points \(p_1=Re^{i\vartheta _1},p_2=Re^{i\vartheta _2}\in {\mathcal {U}}\), with \(\vartheta _1,\vartheta _2\in (-\pi ,\pi )\) and a path \(u\in H^1([a,b];{{\mathbb {R}}}^2)\) which connects \(p_1\) and \(p_2\), we define the close path \({\tilde{\Gamma }}_u\) as the glueing between u and the chord connecting \(p_1\) and \(p_2\). Define moreover \(\delta {\mathop {=}\limits ^{.}}|c_1-c_2|/2>0\). With these notations, we introduce the following classes of paths:
for \(i=1,2\) and \(K_{c_i}^{p_1,p_2}\) as their \(H^1\) weak-closure. Note that every path in the above spaces actually belongs to \({\hat{K}}_{(0,1)}^{p_1,p_2}\cup {\hat{K}}_{(1,0)}^{p_1,p_2}\) or, respectively, to their \(H^1\) weak-closure (cf. (36)). In particular, it is not difficult to see that, for any \(p_1,p_2\in {\mathcal {U}}\)
Once this is clear, we can then prove a version of Theorem 1.6 in the presence of 2-centres and a unique minimal non-degenerate central configuration \(\vartheta ^*\in \Xi \).
Theorem 6.6
Assume that \(N=2\), \(m=1\) and consider a function \(V\in {\mathcal {C}}^2({{\mathbb {R}}}^2\setminus \{c_1,c_2\})\) defined as in (4) and satisfying (V)–(\(V_\alpha \)). There exists \({\tilde{h}}>0\) such that, for every \(h\in (0,{\tilde{h}})\), \(n\in {{\mathbb {N}}}_{\geqq 1}\) and \((c_{j_0},\ldots ,c_{j_{n-1}})\in {\mathcal {B}}^n\), there exists a periodic collision-less and self-intersections-free solution \(x=x(c_{j_0},\ldots ,c_{j_{n-1}};h)\) of the equation \(\ddot{x}=\nabla V(x)\) with energy \(-h\), which depends on \((c_{j_0},\ldots ,c_{j_{n-1}})\) in this way: there exists \({\tilde{R}}={\tilde{R}}(h)>0\) such that the solution x crosses 2n times the circle \(\partial B_{{{\tilde{R}}}}\) in one period, at times \((t_s)_{s=0}^{2n-1}\), in such a way that, for any \(k=0,\ldots ,n-1\):
-
in the interval \((t_{2k},t_{2k+1})\) the solution stays outside \(B_{{{\tilde{R}}}}\) and there exists a neighbourhood \({\mathcal {U}}={\mathcal {U}}({{\tilde{R}}} e^{i\vartheta ^*})\) on \(\partial B_{{\tilde{R}}}\) such that
$$\begin{aligned} x(t_{2k}),x(t_{2k+1})\in {\mathcal {U}}; \end{aligned}$$ -
in the interval \((t_{2k+1},t_{2k+2})\) the solution stays inside \(B_{{{\tilde{R}}}}\) and it is a reparametrization of a minimizer of the Maupertuis’ functional in the space \({\hat{K}}_{c_{j_k}}^{x(t_{2k+1}),x(t_{2k+2})}\).
Proof
Once the notations in the statement are adopted, up to choose a smaller neighbourhood \({\mathcal {U}}\), the proof goes exactly as the proof of Theorem 1.6 at the end of Section 5. Indeed, the glueing technique of Section 5 applies also when \(N=2\) and \(m=1\), since Theorem 3.10 holds under such assumptions, while the proof of Theorem 4.24 does not change if one works with the spaces \({\hat{K}}_{c_1},{\hat{K}}_{c_2}\) instead of working with winding numbers, also in light of (75). \(\square \)
It is left to prove the semi-conjugation of the 2-centre problem with a suitable shift space. As usual, we consider the set of bi-infinite sequences \({\mathcal {B}}^{{\mathbb {Z}}}\) of symbols \(c_1,c_2\). The Bernoulli right shift on \({\mathcal {B}}^{{\mathbb {Z}}}\) is then defined as
and, also in this case, the proof of Theorem 1.8 goes as in Section 6.1, making use of the previous notations and of Theorem 6.6.
Remark 6.7
Let us consider for a while the 2-centre problem driven by isotropic (purely radial) potentials as in [39]. It is well-known that this problem is completely integrable and thus, as expected, the techniques of this section do not apply in this case. Indeed, due to the spherical symmetry of isotropic potentials, every direction is a central configuration and this allows to choose two points \(p_1,p_2\) all around \(\partial B_R\). This is the reason why it is not possible to distinguish between the result of a functional minimization in \(K_{c_1}^{p_1,p_2}\) or in \(K_{c_2}^{p_1,p_2}\) (as above), or a minimization in \(K_{(0,1)}^{p_1,p_2}\) or \(K_{(1,0)}^{p_1,p_2}\) (see Theorem 4.24 or [39]). In fact, moving \(p_1\) and \(p_2\) around \(\partial B_R\), it is always possible to transform a path in \(K_{(0,1)}^{p_1,p_2}\) into a path in \(K_{(1,0)}^{p_1,p_2}\). This fact, as expected, destroys the symbolic dynamics.
References
Ambrosetti, A., Coti Zelati, V.: Periodic Solutions of Singular Lagrangian Systems. Progress in Nonlinear Differential Equations and Their Applications, p. 10. Birkhäuser Boston Inc., Boston, MA, 1993
Barutello, V., Canneori, G.M., Terracini, S.: Minimal collision arcs asymptotic to central configurations. Discrete Contin. Dyn. Syst. 41(1), 61–86, 2021
Barutello, V., Ferrario, D.L., Terracini, S.: On the singularities of generalized solutions to \(n\)-body-type problems. Int. Math. Res. Not. IMRN, pages Art. ID rnn 069, 2008
Barutello, V., Hu, X., Portaluri, A., Terracini, S.: An index theory for asymptotic motions under singular potentials. Adv. Math. 370, 107230, 57, 2020
Barutello, V., Secchi, S.: Morse index properties of colliding solutions to the \(N\)-body problem. Ann. Inst. H. Poincaré Anal. Non Linéaire 25(3), 539–565, 2008
Barutello, V., Terracini, S., Verzini, G.: Entire minimal parabolic trajectories: the planar anisotropic Kepler problem. Arch. Ration. Mech. Anal. 207(2), 583–609, 2013
Barutello, V., Terracini, S., Verzini, G.: Entire parabolic trajectories as minimal phase transitions. Calc. Var. Partial Differ. Equ. 49(1–2), 391–429, 2014
Bolotin, S.V., Kozlov, V.V.: Topological approach to the generalized \(n\)-centre problem. Uspekhi Mat. Nauk 72(3(435)), 65–96, 2017
Bolotin, S.V.: Nonintegrability of the problem of \(n\) centers for \(n >2\). Vestnik Moskov. Univ. Ser. I Mat. Mekh. 3, 65–68, 1984
Bolotin, S.V., Negrini, P.: Regularization and topological entropy for the spatial \(n\)-center problem. Ergodic Theory Dyn. Syst. 21(2), 383–399, 2001
Bolotin, S.V., Negrini, P.: Chaotic behavior in the 3-center problem. J. Differ. Equ. 190(2), 539–558, 2003
Bolsinov, A.V., Taĭmanov, I.A.: Integrable geodesic flows with positive topological entropy. Invent. Math. 140(3), 639–650, 2000
Boscaggin, A., Dambrosio, W., Papini, D.: Parabolic solutions for the planar \(N\)-centre problem: multiplicity and scattering. Ann. Mat. Pura Appl. (4) 197(3), 869–882, 2018
Boscaggin, A., Dambrosio, W., Papini, D.: Periodic solutions to a forced Kepler problem in the plane. Proc. Am. Math. Soc. 148(1), 301–314, 2020
Boscaggin, A., Dambrosio, W., Terracini, S.: Scattering parabolic solutions for the spatial \(N\)-centre problem. Arch. Ration. Mech. Anal. 223(3), 1269–1306, 2017
Boscaggin, A., Ortega, R., Zhao, L.: Periodic solutions and regularization of a Kepler problem with time-dependent perturbation. Trans. Am. Math. Soc. 372(1), 677–703, 2019
Canneori, G.M.: Anisotropic gravitational interactions: variational approach and symbolic dynamics. PhD thesis, Università di Torino, 2021
Canneori, G.M.: \(T\)-periodic loops for the anisotropic \(N\)-centre problem. preparation, 2021
Castelli, R.: Topologically distinct collision-free periodic solutions for the \(N\)-center problem. Arch. Ration. Mech. Anal. 223(2), 941–975, 2017
Chen, K.-C., Yu, G.: Variational construction for heteroclinic orbits of the \(N\)-center problem. Calc. Var. Partial Differ. Equ. 59(1), 1–21, 2020
Devaney, R.L.: Collision orbits in the anisotropic Kepler problem. Invent. Math. 45(3), 221–251, 1978
Devaney, R.L.: Nonregularizability of the anisotropic Kepler problem. J. Differ. Equ. 29(2), 252–268, 1978
Devaney, R.L.: Triple collision in the planar isosceles three-body problem. Invent. Math. 60(3), 249–267, 1980
Devaney, R.L.: Singularities in classical mechanical systems. In: Ergodic Theory and Dynamical Systems, I (College Park, Md., 1979–80), vol. 10. Progress in Mathematics, pp. 211–333. Birkhäuser, Boston, 1981
Dimare, L.: Chaotic quasi-collision trajectories in the 3-centre problem. Celest. Mech. Dyn. Astron. 107(4), 427–449, 2010
Gutzwiller, M.C.: The anisotropic Kepler problem in two dimensions. J. Math. Phys. 14, 139–152, 1973
Gutzwiller, M.C.: Bernoulli sequences and trajectories in the anisotropic Kepler problem. J. Math. Phys. 18(4), 806–823, 1977
Gutzwiller, M.C.: Periodic orbits in the anisotropic Kepler problem. In: Classical Mechanics and Dynamical Systems (Medford, Mass., 1979), vol. 70. Lecture Notes in Pure and Applied Mathematics, pp. 69–90. Dekker, New York (1981)
Gutzwiller, M.C.: Chaos in Classical and Quantum Mechanics, vol. 1. Interdisciplinary Applied Mathematics. Springer-Verlag, New York, 1990
Hirsch, M.W., Smale, S., Devaney, R.L.: Differential Equations, Dynamical Systems, and an Introduction to Chaos, vol. 60, 2nd edn. Pure and Applied Mathematics (Amsterdam). Elsevier/Academic Press, Amsterdam, 2004
Katok, A., Hasselblatt, B.: Introduction to the modern theory of dynamical systems, vol. 54. Encyclopedia of Mathematics and its Applications. Cambridge University Press, Cambridge, 1995
Klein, M., Knauf, A.: Chaotic motion in Coulombic potentials. In: Mathematical physics, X (Leipzig, 1991), pp. 308–312. Springer, Berlin (1992)
Knauf, A.: The \(n\)-centre problem of celestial mechanics for large energies. J. Eur. Math. Soc. (JEMS) 4(1), 1–114, 2002
Knauf, A., Taĭmanov, I.A.: Integrability of the \(n\)-center problem at high energies. Dokl. Akad. Nauk 397(1), 20–22, 2004
Knauf, A., Taĭmanov, I.A.: On the integrability of the \(n\)-centre problem. Math. Ann. 331(3), 631–649, 2005
McGehee, R.: Triple collision in the collinear three-body problem. Invent. Math. 27, 191–227, 1974
Moeckel, R., Montgomery, R., Venturelli, A.: From brake to syzygy. Arch. Ration. Mech. Anal. 204(3), 1009–1060, 2012
Saari, D.G.: The manifold structure for collision and for hyperbolic-parabolic orbits in the \(n\)-body problem. J. Differ. Equ. 55(3), 300–329, 1984
Soave, N., Terracini, S.: Symbolic dynamics for the \(N\)-centre problem at negative energies. Discrete Contin. Dyn. Syst. 32(9), 3245–3301, 2012
Soave, N., Terracini, S.: Addendum to: Symbolic dynamics for the \(N\)-centre problem at negative energies [mr2912076]. Discrete Contin. Dyn. Syst. 33(8), 3825–3829, 2013
Teschl, G.: Ordinary differential equations and dynamical systems, vol. 140. Graduate Studies in Mathematics. American Mathematical Society, Providence, RI (2012)
Yu, G.: Periodic solutions of the planar \(N\)-center problem with topological constraints. Discrete Contin. Dyn. Syst. 36(9), 5131–5162, 2016
Funding
Open access funding provided by Universitá degli Studi di Torino within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by P. Rabinowitz
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A. Variational principles
Appendix A. Variational principles
This short appendix collects some general variational results which involve the different functionals used along this work. In particular, we want to establish some important relations between the Maupertuis’ functional, the Lagrange-action functional and the Jacobi-length functional.
Consider an open set \(\Omega \subseteq {{\mathbb {R}}}^2\), a potential \(V\in {\mathcal {C}}^2(\Omega )\) and introduce the second order system
Note that (76) has Hamiltonian structure and thus we can look for those solutions x which preserve a fixed energy \(h\in {{\mathbb {R}}}\) along their motion, that is, such that
and, in particular, such solutions will be confined inside the open Hill’s region
For \(T>0\) and \(x\in H^1([0,T];{{\mathbb {R}}}^2)\) we define the Lagrange-action functional as
and it is well known that the Least Action Principle affirms that a solution \(x:[0,T]\rightarrow \Omega \) of (76) corresponds to a critical point of \({\mathcal {A}}_T\).
In this work we have mainly used the Maupertuis’ functional, which in this setting reads
and it is differentiable in the space
An equivalent result of the Least Action Principle can be stated for \({\mathcal {M}}_h\), the so-called Maupertuis’ Principle (see [1], but also Theorem 4.1 for a version concerning fixed-ends problems), which also provides a first relation between the critical points of the two functionals.
Theorem A.1
Let \(u\in H_h\) be a critical point of \({\mathcal {M}}_h\) at a positive level. Define \(\omega >0\) such that
Then, the function \(x(t){\mathop {=}\limits ^{.}}u(\omega t)\) solves (76)–(77) in the interval [0, T], with \(T{\mathop {=}\limits ^{.}}1/\omega \).
As a consequence, the function x is also a critical point of \({\mathcal {A}}_{1/\omega }\) in the space \(H^1([0,1/\omega ];\Omega )\).
The next result refines the correspondence between critical points of \({\mathcal {M}}_h\) and \({\mathcal {A}}_T\), showing that in particular a critical point of the Maupertuis’ functional minimizes the action for every time \(T>0\).
Proposition A.2
Let \(u\in H_h\) be a critical point of \({\mathcal {M}}_h\) at a positive level. If, for every \(T>0\), we define
then
Proof
For every \(T>0\), we can compute
Since u is fixed, the previous quantity depends only on T and it is easy to check that it attains its minimum at
\(\square \)
The previous result also shows a well-known property of the Maupertuis’ functional, that is, that this functional is invariant under time reparametrizations. However, \({\mathcal {M}}_h\) is not additive, and this suggests the introduction of another geometric functional. The Jacobi-length functional is defined as
for every \(u\in H_h\). Note that Theorem A.1 could be rephrased for \({\mathcal {L}}_h\) and thus classical solutions will be suitable reparametrizations of critical points of \({\mathcal {L}}_h\) (see for instance [37]). Moreover, the Jacobi-length functional is also a fundamental tool in differential geometry since \({\mathcal {L}}_h(u)\) is exactly the Riemannian length of the curve parametrized by u with respect to the Jacobi metric
\(\delta _{ij}\) being the Kronecker delta. As the Maupertuis’ functional, \({\mathcal {L}}_h\) is invariant under time reparametrizations and, being a length, it is also additive.
Note that, if \(u\in H_h\), the Cauchy-Schwarz inequality easily gives
with the occurrence of the equality if and only if the quotient
is constant for almost everywhere \(t\in [0,1]\). This shows that \({\mathcal {M}}_h\) and \({\mathcal {L}}_h\) share the same critical points u such that \({\mathcal {M}}_h(u)>0\). This is sufficient to give the (easy) proof of the next result.
Proposition A.3
Let \(u\in H_h\) be a critical point of \({\mathcal {M}}_h\) at a positive level, let \(\omega \) be defined as in Theorem A.1 and let \(x_T\) be defined for every \(T>0\) as in Proposition A.2. Then, the following chain of equalities hold
We can say that, up to constant factors and time re-parametrizations, the three functionals coincide on the non-constant critical points of \({\mathcal {M}}_h\).
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Barutello, V., Canneori, G.M. & Terracini, S. Symbolic Dynamics for the Anisotropic N-Centre Problem at Negative Energies. Arch Rational Mech Anal 242, 1749–1834 (2021). https://doi.org/10.1007/s00205-021-01714-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00205-021-01714-8