
Abstract
The impulse to study this topic came from a variant of the Wallace-Simson theorem, which deals with the locus of the point P such that the points that are symmetric to P with respect to three lines in the plane are collinear. A 3D generalization can be as follows: Given four straight lines which are parallel to a plane. Determine the locus of the point P such that points that are symmetric to P with respect to these four lines are coplanar. Surprisingly, the locus of P is a cylinder of revolution with the axis which is perpendicular to the fixed plane. Moreover, all planes given by points that are symmetric with an arbitrary point P of the locus with respect to the given four lines pass through a fixed line f. While in the planar version the fixed element is the orthocenter of the triangle given by the three lines, the role of the fixed line f with respect to the four given lines is not obvious.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The well-known Wallace–Simson (W–S) theorem states: The feet of normals from an arbitrary point P in the circumcircle of a triangle to its side lines are collinear [1, 5, 7]. A variant of the W–S theorem says: For any point P in the circumcircle of a triangle, the points symmetric to P with respect to the side lines of the triangle are collinear. Moreover, all lines given by points that are symmetric to a locus point P with respect to the side lines of the given triangle pass through the orthocenter of the triangle. We will call it a symmetric variant of the W–S theorem.
There are various generalizations of the W–S theorem both planar and spatial or n-dimensional, see [6, 8,9,10,11,12,13,14].
A 3D generalization of the W–S theorem on four arbitrary straight lines which deals with the locus of the point P such that the feet of normals from P to these four lines are coplanar yields in general as the locus of P a cubic surface. It is possible to distinguish the individual positions of the lines that lead to different types of cubic surfaces (or quadrics) and their singular forms [12]. In our opinion, such a classification has not yet taken place, it is a matter of further research.
We decided to investigate the case where four given lines \(k_1,k_2,k_3,k_4\) are parallel to a fixed plane. One of the reasons to present this result is that the locus of P was very unexpected to us—we got a cylinder of revolution (Theorem 1), see [2].
The main results of the paper are given in the Theorem 2 and the Theorem 3. We investigate the locus of all points P whose reflections in four mutually skew lines \(k_1,k_2,k_3,k_4\) (which are parallel to a plane) are coplanar. The locus of P is again a cylinder of revolution (Theorem 2). This spatial version retains the property of the planar version—all the planes given by points that are reflected from an arbitrary locus point P in the lines \(k_1,k_2,k_3,k_4\) pass through a fixed line f (Theorem 3).
The computations, especially the elimination of variables, were performed in the program CoCoAFootnote 1 [3] which is based on Gröbner bases computations [4]. Resulting figures showing the searched locus were made in MAPLE and GeoGebra.
2 W–S theorem: 4 Lines Parallel to a Plane
In this section, we deal with the 3D generalization of the W–S theorem on four straight lines that are parallel to a plane (Theorem 1). We omit the proof because a similar problem is discussed in the next section.
Theorem 1
In the Euclidean space \(\mathbb {E}^3\) consider four pairwise skew straight lines \(k_1,k_2,k_3,k_4\) that are parallel to a plane. Then the locus of all points P such that feet of normals from P to the given lines are coplanar is a cylinder of revolution whose axis is orthogonal to the given plane.
Assume that the lines \(k_1,k_2,k_3,k_4\) are parallel to the xy-plane and by \(z_1,z_2,z_3,z_4\) we denote their distances from the xy-plane. Let \(a_1x+b_1y+c_1=0\), \(a_2x+b_2y+c_2=0\), \(a_3x+b_3y+c_3=0\) and \(a_4x+b_4y+c_4=0\) be the equations of the orthogonal projections of \(k_1,k_2,k_3,k_4\) in the xy-plane. Then the locus equation of the point \(P=(p,q,r)\) is
where
\(A=z_2a_3a_4(a_3b_4 - a_4b_3) + z_3a_2a_4(a_4b_2 - a_2b_4) + z_4a_2a_3(a_2b_3 - a_3b_2)\),
\(B=z_2(a_3c_4 + a_4c_3)(a_3b_4 - a_4b_3) + z_3(a_2c_4 + a_4c_2)(a_4b_2 - a_2b_4) + z_4(a_2c_3 + a_3c_2)(a_2b_3-a_3b_2)\),
\(C=z_2(a_3a_4 + b_3b_4)(a_3c_4 - a_4c_3) + z_3(a_2a_4 + b_2b_4)(a_4c_2 - a_2c_4) + z_4(a_2a_3 + b_2b_3)(a_2c_3-a_3c_2)\),
\(D=z_2c_3c_4(a_3b_4 - a_4b_3) + z_3c_2c_4(a_4b_2 - a_2b_4) + z_4c_2c_3(a_2b_3 - a_3b_2)\). \(\square \)
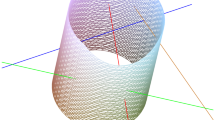
We see that the locus Eq. (1) represents a cylinder of revolution whose axis is perpendicular to the xy-plane, Fig. 1.

Given four lines parallel to a plane. The locus of the point P such that the feet of normals from P to the given lines are coplanar is a cylinder of revolution
Remark 1
The coefficient A by \(p^2+q^2\) in (1) depends only on the directions of the lines \(k_1,k_2,k_3,k_4\) and their distances \(z_1,z_2,z_3,z_4\) to the fixed xy-plane due to the absence of the terms \(c_1,c_2,c_3,c_4\).
Remark 2
If all lines \(k_1,k_2,k_3,k_4\) intersect a line that is perpendicular to the fixed plane (axis z in our coordinate system), then the locus of P is this line instead of the cylinder of revolution. To see this, note that in this case all coefficients \(c_1,c_2,c_3\) and \(c_4\) vanish. This means \(B=C=D=0\) in (1).
Remark 3
Note that for any point P of the locus, the entire line passing through the point P that is perpendicular to the given plane belongs to the locus. So it is enough to examine the locus in this plane.
3 Symmetric Variant of W–S Theorem: 4 Lines Parallel to a Plane
In this section, we study the main topic of the paper—a 3D generalization of a symmetric variant of W–S theorem on four straight lines that are parallel to a plane.
The symmetric variant of the W–S theorem says that the locus of the point P such that points \(K',L',M'\) which are symmetric to P with respect to the side lines of a given triangle ABC are collinear is the circumcircle of ABC. Moreover, for an arbitrary locus point P all lines given by collinear points \(K',L',M'\) are concurrent at the orthocenter H of the triangle ABC, Fig. 2.

Points \(K',L',M'\) lie on a line which passes through the orthocenter H of ABC
The collinearity of the points \(K',L',M'\) follows from the W–S theorem since a homothety centered at P with ratio 2 sends the feet K, L, M of normals from P to the sides of ABC to the collinear points \(K',L',M'\).
3.1 Symmetric Variant of W–S Theorem
The following is a spatial generalization of the symmetric variant of the W–S theorem on four straight lines that are parallel to a plane.
Theorem 2
In the Euclidean space \(\mathbb {E}^3\) consider four pairwise skew straight lines \(k_1,k_2,k_3,k_4\) that are parallel to a plane. Then the locus of the point P such that points \(X_1,X_2,X_3,X_4\) that are symmetric to P with respect to the straight lines \(k_1,k_2,k_3,k_4\) are coplanar is a cylinder of revolution.
Proof
With the proper choice of a Cartesian coordinate system, we achieve that \(a_1x+b_1y+c_1=0\), \(a_2x+b_2y+c_2=0\), \(a_3x+b_3y+c_3=0\), \(a_4x+b_4y+c_4=0\) are equations of orthogonal projections of the lines \(k_1,k_2,k_3,k_4\). Denote by \(X_1=(x_1,y_1,z_1)\), \(X_2=(x_2,y_2,z_2)\), \(X_3=(x_3,y_3,z_3)\), \(X_4=(x_4,y_4,z_4)\) the points that are symmetric to \(P=(p,q,r)\) with respect to the lines \(k_1,k_2,k_3,k_4\). Then:
\(X_1\) is symmetric to P with respect to \(k_1\Rightarrow \)
\(h_1:=a_1(p+x_1)+b_1(q+y_1)+2c_1=0, h_2:= b_1(p-x_1) - a_1(q-y_1)=0\),
\(X_2\) is symmetric to P with respect to \(k_2 \Rightarrow \)
\(h_3:=a_2(p+x_2)+b_2(q+y_2)+2c_2=0, h_4:= b_2(p-x_2) - a_2(q-y_2)=0\),
\(X_3\) is symmetric to P with respect to \(k_3 \Rightarrow \)
\(h_5:=a_3(p+x_3)+b_3(q+y_3)+2c_3=0, h_6:= b_3(p-x_3) - a_3(q-y_3)=0\),
\(X_4\) is symmetric to P with respect to \(k_4 \Rightarrow \)
\(h_7:=a_4(p+x_4)+b_4(q+y_4)+2c_4=0, h_8:= b_4(p-x_4) - a_4(q-y_4)=0\),
\(X_1,X_2,X_3,X_4\) are coplanar \(\Rightarrow \)
The elimination of the eight variables \(x_1,y_1,\dots ,x_4,y_4\) in the ideal \(J=(h_1,\dots ,h_9)\) leads to a locus equation. In fact, the computation in CoCoA does not terminate due to the complex computation.
We can introduce some simplifications that do not affect the final result. Another approach that seems more readable is the following.
By eliminating \(x_1,y_1\) in \(h_1=0,h_2=0\), then \(x_2,y_2\) in \(h_3=0,h_4=0\), etc. we get
\(x_1= (- (a_1^2 - b_1^2)p - 2a_1b_1q - 2a_1c_1)/(a_1^2 + b_1^2)\),
\(y_1= (- 2a_1b_1p + (a_1^2 - b_1^2)q - 2b_1c_1)/(a_1^2 + b_1^2)\),
\(x_2= (- (a_2^2 - b_2^2)p - 2a_2b_2q - 2a_2c_2)/(a_2^2 + b_2^2)\),
\(y_2= (- 2a_2b_2p + (a_2^2 - b_2^2)q - 2b_2c_2)/(a_2^2 + b_2^2)\),
\(x_3= (- (a_3^2 - b_3^2)p - 2a_3b_3q - 2a_3c_3)/(a_3^2 + b_3^2)\),
\(y_3= (- 2a_3b_3p + (a_3^2 - b_3^2)q - 2b_3c_3)/(a_3^2 + b_3^2)\),
\(x_4= (- (a_4^2 - b_4^2)p - 2a_4b_4q - 2a_4c_4)/(a_4^2 + b_4^2)\),
\(y_4= (- 2a_4b_4p + (a_4^2 - b_4^2)q - 2b_4c_4)/(a_4^2 + b_4^2)\).
Assume that the vectors \((a_1,b_1)\), \((a_2,b_2)\), \((a_3,b_3)\), \((a_4,b_4)\) are unit and put \(a_1=c_1=0,b_1=1\) and \(z_1=0\) which has no effect on the generality. We substitute \(x_1,y_1,\dots ,x_4,y_4\) into the determinant (2) and after rearrangement, we get instead of (2) the relation
which yields (1). We obtain a cylinder of revolution, Fig. 3. \(\square \)

The locus of all points P such that the points that are symmetric to P with respect to the given four lines are coplanar is a cylinder of revolution
3.2 Fixed Line
In this part, we will show that all planes given by the points \(X_1,X_2,X_3,X_4\) pass through a fixed line for any locus point P.
Theorem 3
Let P be an arbitrary point of the locus (1). Then all planes given by the points \(X_1,X_2,X_3,X_4\) that are symmetric to P with respect to the straight lines \(k_1,k_2,k_3,k_4\) pass through a fixed line f.
Proof
For every point P of the locus circle (and all points on the line through P which is perpendicular to the given plane) there exists a corresponding plane given by the points \(X_1,X_2,X_3,X_4\). To determine the fixed line, we proceed in the following way:
First, we find two distinct points \(P_1\) and \(P_2\) in the locus circle (1), whose coordinates are rational in \(a_1,\dots ,a_4,b_1,\dots ,b_4,c_1,\dots ,c_4,z_1,\dots ,z_4\). In this way we avoid cases where the locus point coordinates contain radicals.
Second, we determine two planes given by points \(X_1,X_2,X_3,X_4\) that correspond to the points \(P_1,P_2\).
Third, we identify the intersection line f of these two selected planes.
Fourth, we verify that the line f lies in all planes corresponding to any point P in the locus circle.
Let \(P_{123}\) be a plane given by the points \(X_1,X_2,X_3\)
with \(P=(p,q,0)\) obeying (1), see (3). Eliminating q in the ideal \(I=(P_{123},K)\) we gain an elimination ideal generated by one polynomial (principle ideal). This gives a factored equation
where f(p) is linear in p and does not contain x, y, z, while g(x, y, z, p) is quadratic in x, y, z, p. From \(f(p)=0\) we get the first coordinate of the point \(P_1=(p_1,q_1,0)\) of the locus
The case \(f(p)=0\) in \(f(p)\cdot g(x,y,z,p)=0\) demonstrates the situation where the points \(X_1,X_2,X_3\) are collinear and the corresponding plane is not uniquely determined. For an idea of how complex the computation is, the polynomial \(f(p)\cdot g(x,y,z,p)\) in the elimination ideal has 5758 terms.
Using elimination of p in the ideal \(I=(P_{123},K)\) we get the second coordinate of the point \(P_1\) in the locus
Similarly, using the plane \(P_{124}\) given by the points \(X_1,X_2,X_4\), we eliminate p and then q in the ideal \(J=(P_{124},K)\) and get the coordinates of the second point \(P_2=(p_2,q_2,0)\) in the locus
and
The substitution of \(p_2,q_2\) for p, q into the equation of the plane \(P_{123}\) gives the equation of the plane \(P_{123}(p_2,q_2)\)
while the substitution of \(p_1,q_1\) for p, q into the equation of the plane \(P_{124}\) yields the equation of the plane \(P_{124}(p_1,q_1)\)
where \(A_1,B_1,C_1,D_1\) and \(A_2,B_2,C_2,D_2\) are certain polynomials containing \(a_1,\dots ,a_4\), \(b_1,\dots ,b_4\), \(c_1,\dots ,c_4\) and \(z_1,\dots ,z_4\).
Now we identify the intersection of the planes \(P_{123}(p_2,q_2)\) and \(P_{124}(p_1,q_1)\). The common line \(f=P_{123}(p_2,q_2)\cap P_{124}(p_1,q_1)\) is
where \(X=(x,y,z)\), \(F=(f_1,f_2,0)\), \({\varvec{{v}}}=(v_1,v_2,v_3)\), with
\(f_1=(z_2a_3a_4(b_4c_3 - b_3c_4) + z_3a_2a_4(b_2c_4 - b_4c_2) + z_4a_2a_3(b_3c_2 - b_2c_3))/(z_2a_3a_4(a_3b_4 - a_4b_3) + z_3a_2a_4(a_4b_2 - a_2b_4) + z_4a_2a_3(a_2b_3 - a_3b_2))\),
\(f_2=(z_2b_3b_4(a_4c_3 - a_3c_4) + z_3b_2b_4(a_2c_4 - a_4c_2) + z_4b_2b_3(a_3c_2 - a_2c_3))/(z_2a_3a_4(a_3b_4 - a_4b_3) + z_3a_2a_4(a_4b_2 - a_2b_4) + z_4a_2a_3(a_2b_3 - a_3b_2))\),
and
\(v_1=4a_2a_3a_4(c_2(a_3b_4 - a_4b_3) + c_3(a_4b_2 - a_2b_4) + c_4(a_2b_3 - a_3b_2))\),
\(v_2=4(a_3a_4b_2c_2(a_3b_4 - a_4b_3) + a_2a_4b_3c_3(a_4b_2 - a_2b_4) + a_2a_3b_4c_4(a_2b_3 - a_3b_2))\),
\(v_3=a_3a_4z_2(a_3b_4 - a_4b_3) + a_2a_4z_3(a_4b_2 - a_2b_4) + a_2a_3z_4(a_2b_3 - a_3b_2)\).
Finally, we verify that the line f is fixed for all planes when P moves along the locus circle (1). Substitution of the coordinates of the line f for x, y and z into the equation of the plane \(P_{123}\) yields
where
However, for every point P in the locus circle (1) \(K=0\) and therefore \(S=0\). This implies that for every point P in the locus circle all points of the line f lie in the plane \(P_{123}\).
We can conclude:
All planes given by points \(X_1,X_2,X_3,X_4\) pass through the line f when P moves along the locus circle, Fig. 4. \(\square \)

All planes given by points \(X_1,X_2,X_3,X_4\) pass through a fixed straight line f when P moves along the locus circle
Remark 4
Note that if \(c_1=c_2=c_3=c_4=0\), then \({\varvec{{v}}}\sim (0,0,1)\). The fixed line f is orthogonal to the xy-plane and intersects all four given lines \(k_1,k_2,k_3,k_4\).
4 Conclusion
This paper deals with a 3D version of a variant of the W–S theorem, where four given lines are parallel to a plane. We examine the points P such that the points that are symmetric to P with respect to the given four lines are coplanar. The locus of P is a cylinder of revolution. This fact may be considered as another method of construction of a cylinder of revolution.
Moreover, all planes given by the points that are symmetric to P with respect to the given four lines pass through a fixed line f for every locus point P. Unlike the planar version, where the fixed element is the orthocenter of the triangle, which is given by three lines, the role of the fixed line f with respect to the four given lines is unknown. The authors will try to clarify this in the future.
The authors are still working on additional cases according to the position of the four lines.
Notes
Software CoCoA is freely distributed at http://cocoa.dima.unige.it.
References
Altshiller-Court, N.: College Geometry: An Introduction to the Modern Geometry of the Triangle and the Circle. Barnes & Noble, Inc., New York (1952)
Blažek, J., Pech, P.: A spatial generalization of Wallace–Simson theorem on four lines. Adv. Intell. Syst. Comput. 1296, 103–114 (2021)
Capani, A., Niesi, G., Robbiano, L.: CoCoA, a System for Doing Computations in Commutative Algebra. http://cocoa.dima.unige.it (1995)
Cox, D., Little, J., O’Shea, D.: Ideals, Varieties, and Algorithms, 2nd edn. Springer, New York (1997)
Coxeter, H.S.M., Greitzer, S.L.: Geometry Revisited. Mathematical Association of America, Toronto (1967)
Guzmán, M.: An extension of the Wallace–Simson theorem: projecting in arbitrary directions. Am. Math. Mon. 106, 574–580 (1999)
Johnson, R.: Advanced Euclidean Geometry. Dover, New York (1960)
Molnár, E., Pech, P., Szirmai, J.: Simson-Wallace locus in d-dimensional projective–metric space. J. Geom. 108, 393–409 (2017)
Odehnal, B.: Degenerate cubic surfaces and the Wallace–Simson-theorem in space. In: 17th International Conference on Geometry and Graphics, Beijing (2016)
Pech, P.: On Simson–Wallace theorem and its generalizations. J. Geom. Graph. 9, 141–153 (2005)
Pech, P.: On a 3D Extension of the Simson–Wallace theorem. J. Geom. Graph. 18, 205–215 (2014)
Pech, P.: Extension of Simson–Wallace theorem on skew quadrilaterals and further properties. In: Botana, F., Quaresma, P. (eds.) Automated Deduction in Geometry (ADG) 2014, LNAI, vol. 9201, pp. 108–118. Springer, Berlin (2015)
Riesinger, R.: On Wallace loci from the projective point of view. J. Geom. Graph. 8, 201–213 (2004)
Roanes–Lozano, E., Roanes–Macías, E.: Automatic determination of geometric loci. 3D-extension of Simson–Steiner theorem. In: AISC 2000, Campbell J.A., Roanes–Lozano, E. (eds.) LNAI, vol. 1930, pp. 157–173. Springer, Berlin (2000)
Acknowledgements
The authors are grateful to the anonymous referees for valuable suggestions and recommendations which improved the quality of the text.
Funding
Open access publishing supported by the National Technical Library in Prague. The authors have not disclosed any funding.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have not disclosed any competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Blažek, J., Pech, P. Wallace–Simson Theorem on Four Lines Parallel to a Plane. Results Math 78, 170 (2023). https://doi.org/10.1007/s00025-023-01950-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00025-023-01950-2