
Abstract
Most insect species are rare most of the time, but populations of certain taxa exhibit dramatic fluctuations in abundance across years. These fluctuations range from highly regular, cyclical dynamics to mathematical chaos. Peaks in abundance, or “population outbreaks” are notable both for the damage they can cause in natural and planted forests and for the rich body of research and theory they have inspired focused on elucidating drivers of population fluctuations across time and space. This chapter explores some of the key mechanisms that explain the population dynamics of outbreaking species, including variation in intrinsic growth rates, lagged endogenous feedbacks linked to top-down and/or bottom-up effects, nonlinearities in the density dependent relationship, and the existence of multiple stable and unstable equilibria, among others. We explore some basic mathematical and graphical approaches to modeling and representing these dynamics and provide a suite of empirical examples from the recent and historical literature.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others

5.1 Introduction
To the casual observer, the arthropod fauna of temperate forests may appear to be dominated by mosquitoes or other biting insects. Closer inspection of the leaf litter, the moss at the base of a tree, or leaf surfaces (or reading this book, in particular this chapter), quickly reveals that insect diversity in many forested landscapes can be considerable. Still, the degree to which insects interact with trees, stands and landscapes to drive forest community and ecosystem dynamics is rarely obvious without intensive study. In fact, most species of insects are rare most of the time.
Occasionally, insect populations increase to levels that are difficult or impossible to ignore. Such events, often referred to as “outbreaks,” are characterized by explosive increases in abundance (Berryman 1987) which are often episodic (Myers 1988; Williams et al. 2000) and where population growth is largely unconstrained by the ecological forces that had held it in check at lower densities. By virtue of the sheer number of individuals they comprise, outbreaking populations can cause significant damage to forests, crops, and other ecosystems and can disrupt ecosystem services. In the most dramatic examples, outbreaking populations can reach abundances in the tens of billions, capable of transforming whole landscapes in ways that can even be seen from space or that warrant multiple mentions in the Bible, as with the infamous plagues of desert locusts which continue to this day (Behmer 2009).
Outbreaks are also common in forest systems. Recently, an unprecedented outbreak of the Mountain pine beetle in the western United States and Canada produced tree mortality over 374,000 km2 from 2000–2020; the ensuing fires, decay and growth losses are estimated to have released 270 megatons (Mt) of carbon, contributing measurably to global carbon dioxide pools (Aukema et al. 2006; Kurz et al. 2008; Reed et al. 2014). Some species experience cyclical dynamics with peaks and troughs in abundance that occur at strikingly regular intervals ranging from a few years to multiple decades (Baltensweiler and Fischlin 1988; Tenow et al. 2013; Pureswaran et al. 2016). Others experience yearly fluctuations that can appear random or chaotic and are much more difficult to predict. In this chapter we offer an exploration of the factors that influence population cycles and that lead to outbreaks along with some of some of the principal approaches to modeling such dynamics.
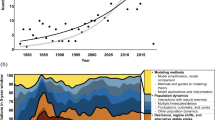
The field of population dynamics has deep roots in entomology. Studies of fluctuations in insect abundance—particularly of forest insects—represent some of the core empirical work in the discipline and have informed key theory in the field (Royama 1977, 1992; Speight et al. 1999; Liebhold and Kamata 2000; Abbott and Dwyer 2008; Price 2011; Isaev et al. 2017). This is due in part to the relative ease by which insects can be monitored (either directly via trapping or by measuring defoliation, for example). Long time series of population abundance spanning at least a few decades and/or detailed life tables (tallies of abundance across life stages) are required to effectively examine hypotheses relating to patterns of abundance over time. Contemporary abundance estimates of sufficient length exist for numerous insect species, particularly for pests of economic importance (Turchin 2003). Dendrochronological (tree ring) studies that cross-reference patterns of growth or xylem damage across living and dead trees (including naturally preserved wood or structural timber) allow researchers to reconstruct abundance time series over centuries (Esper et al. 2007), though interpretation of these data can be challenging (Trotter et al. 2002). Finally, paleoecological reconstruction of insect abundance (e.g. using insect head capsules, wing scales, frass, or damaged plants preserved in bogs or sediments) can even span millennia (Sonia et al. 2011; Montoro Girona et al. 2018; Navarro et al. 2018).
5.1.1 Forest Insects on Plantation Trees and on Evolutionarily Naïve Hosts
One increasingly common situation where herbivorous forest insects can become serious economic and/or ecological threats corresponds to the relatively small subset of species that respond to a super-abundant and often minimally defended resource. This occurs primarily (a) in plantation forestry where trees are typically grown in high-density, low-diversity monocultures, and (b) as a consequence of biological invasion in natural forests where native tree hosts are exposed to insects with which they have no evolutionary history and against which they have little capacity for defense. In the first case, any of the often globally distributed insects colonizing pine or Eucalyptus plantations [e.g. the Eurasian woodwasp (Sirex noctilio) or the Red gum lerp psyllid (Glycaspis brimblecombei)] could clearly be labeled pests as they reduce yields and negatively impact forest plantation profitability (Garnas et al. 2012; Hurley et al. 2016). Here, host trees are nearly always available as new compartments of even-aged cohorts are continuously being planted. As such, the plantation environment comprises a mosaic of different ages. This results in a relatively stable and renewable resource from the perspective of insects (see Box 5.1 for a detailed example). It is worthwhile to note that such sustained, elevated pest densities can also occur when both trees and insects are native, such as is the case with root weevils in North American pine plantations (Rieske and Raffa 1990), chrysomelid beetles on Eucalyptus in Australia (Strauss 2001), or pine shoot beetles in Europe (Schroeder 1987) among others.
The second case arises in large part as an unintended consequence of global trade whereby exotic organisms establish in forests or plantations worldwide. Where affected trees lack a co-evolutionary history with newly arrived insects, resistance to herbivory can be low or even absent. This is largely the situation with American ash (Fraxinus spp.) which lacks resistance to the Emerald ash borer (Agrilus planipennis) in the United States and Europe (Herms and McCullough 2014) or pine (Pinus spp.) and the Red turpentine beetle (Dendroctonus valens) in China (Wingfield et al. 2016). In such examples, insect populations can reach extremely high abundances that often result in widespread mortality of host trees. Consequently, novel insect pests often devastate the local tree resource after which their own populations crash due to the lack of available host material. While it’s tempting to imagine that pest populations may go extinct once they have eaten all available trees, in practice, populations often persist on low-density “escape” trees (those that were missed by the initial wave of attack) or on the small tree cohort that survived as seeds or seedlings but become susceptible as they age. In this case, the “outbreak,” while dramatic and devastating, is likely to be short-lived as it moves toward some new equilibrium density on the landscape.
5.1.2 Outbreak Dynamics as an Emergent Property of Insect-Host-Natural Enemy Interactions
While some insects emerge as pests principally as a consequence of specific ecological conditions (e.g. high host densities/low diversity of host and/or a lack of co-evolved responses as discussed in the previous section), an important subset of damaging insects includes a suite of species that are naturally prone to volatile population dynamics. This volatility, characterized by wide though often remarkably regular fluctuations in abundance, arises as a consequence of particular aspects of their biology, ecology, or community interactions. These so-called “outbreak species” are a relatively small, highly non-random subset of insects that may be either native or introduced. Species characterized by outbreak dynamics account for a highly disproportionate share of management budgets and have been the focus of intense study relative to non-outbreaking species. Examining the combinations of environmental conditions, life history traits and community interactions that give rise to outbreak dynamics, or lack thereof, has practical value for management and contributes to basic understanding of biological populations. Understanding the features of populations that promote outbreak behavior also helps us to understand why most populations do not display outbreak dynamics and instead are relatively rare and stable. Numerous books and journal articles have been written on the topic, which we broadly synthesize in this chapter. Much of this theory is rooted in classical population dynamics.
5.1.3 Introduction to Population Dynamics
Many textbooks address the dynamics of populations in great depth and from many different perspectives. The field is active with sustained, ongoing discovery and theoretical development (Nicholson 1954; Royama 1992; Berryman 1999; Turchin 2003; Gotelli 2008; Vandermeer and Goldberg 2013; Isaev et al. 2017). Much of the conceptual basis of our current understanding of how (self-regulated) populations behave is rooted in the simple equation:
where t is a discrete number of generations and Nt is the population abundance t generations from an arbitrary starting point (t = 0). Following this logic, N0 is the “starting” abundance at time zero. In the final term, eRt, e is Euler’s number (~2.178) and Rt is defined as the per capita population growth rate, measured as the number of individuals in the next generation for each individual in the current generation. The relationship between N and R is at the core of why such an apparently simple model can produce a wide range of ecologically plausible dynamics with minimal modification to its parameters. Both terms carry the subscript t which means that they vary in time, and as it turns out, they also vary as a function of one another. For N this relationship is transparent: abundance is clearly a function of the growth rate of populations (Eq. 5.1; left [blue] arrow in Fig. 5.1). Interestingly (and crucially for the dynamics of populations), R is also a function of N (Fig. 5.1). In other words, the per capita growth rate (individuals per individual per unit time) is dependent on the number (or density) of individuals in that population. This feedback between density and growth rate is at the very core of our understanding of population dynamics. Special cases within this feedback system produce outbreak dynamics in a subset of forest insects.

Conceptual diagram showing feedback between population abundance (N) and per capita population growth rate (R). The simulated time series on the bottom left depicts population fluctuation under simple density dependence with the inclusion of a stochastic component (ε) that approximates the exogenous (e.g. climate or other abiotic effects, impact of generalist predators) contribution to interannual fluctuations in abundance. The graph in the bottom right shows negative density dependence while accommodating the potential for time-delayed feedbacks (lags) via the equation Rt = F(Nt, Nt-1,…,Nt-x) + ε
Why does R vary with population density? One major reason is simply competition for resources. When populations have few individuals, resources (i.e. food, oviposition sites, nutrients, etc.) are abundant. Thus, each individual is more likely to contribute maximally to population growth, either via increased birth rates, reduced death rates or both. At the other extreme, when N is high, resources become limiting and the average contribution of each individual to the next generation is reduced. Population regulation via competition for resources is dubbed “bottom-up” because the resource pool (often plants, as in the case of herbivorous insects) is usually depicted as below the consumer pool in visualizations of trophic (food) pyramids, webs or chains. There can also be “top-down” pressure from natural enemies (i.e. predators, parasitoids or pathogens) that sit “above” the consumer pool and respond to and sometimes suppress prey density. Bottom-up effects can also occur via the induction of plant defenses that limit resource quality or availability of plant tissues to herbivores. These defenses make plants more challenging or less profitable to eat. Top-down control by natural enemies as well as bottom-up control via inducible defenses can introduce a time lag (i.e. as predator populations respond to changes in prey density or as plants respond to herbivore attack). Such time lags turn out to be very important as they can result in predictable, cyclical fluctuations in abundance, which will be discussed in more detail below.
In many populations, the relationship between N and R is roughly linear and negative (Fig. 5.1, bottom right). In such cases it is referred to as simple density dependence. There are a few important things to recognize about the simple density dependent relationship, some of which require that we define a few new terms. First, note that Rt can be either positive, negative or zero (Fig. 5.1). It is intuitive that at high density, population growth becomes negative. Otherwise, populations would tend to grow forever and become infinitely abundant. Population growth rate must likewise be positive at low or intermediate density—species for which this is not the case would have gone extinct long ago. Where the density dependent line crosses the R = 0 line (dashed line in Fig. 5.1, right) is a stable equilibrium point; in the case of simple density dependence, this point has a special name: the equilibrium abundance, or K. The word “stable” when applied to an equilibrium point is another way of saying it is an attractor. An attractor in this context is an abundance toward which populations tend, as the term suggests. Looking again at Fig. 5.1, this is easy to visualize—when density is below K (N < K), R is positive and populations grow; when N > K, R is negative and populations shrink. In the absence of any stochastic variation, populations exactly at K (N = K) would neither grow nor shrink, though this rarely if ever occurs in nature over successive generations. In fact, anywhere the R function crosses the R = 0 line is an equilibrium point.
With simple (negative) density dependence, there is one additional parameter that emerges from the R function. Despite the potential to be confusing, this parameter uses the same letter as the per capita population growth rate, but in the lowercase: r. “Little r,” as it is sometimes called, is the intrinsic growth rate of the population. Little r can be thought of as the maximum per capita growth rate when that growth rate is unaffected by any of the limitations imposed by density. In other words, r is the value of R for the special case when N = 0 (never mind that populations with zero individuals are technically extinct). Thus, r can be easily read as the Y intercept of the R by N function.
Figure 5.2 shows some of the possible relationships between r and K. Many of these concepts will have relevance in subsequent sections and so are worth examining here. In all cases, there are three primary aspects we are concerned with the: (1) intrinsic growth rate (r); (2) equilibrium abundance (K) of the population; and (3) the strength of the density dependent relationship, which can be understood as the slope of the line, and calculated as—r / K. In Fig. 5.2a, halving r from 3.0 to 1.5 while keeping the slope constant has the effect of shifting K to the left, from 100 to 50. In Fig. 5.2b, similar changes in r while holding K constant results in a significantly shallower slope (weaker density dependence). Finally, changing K from 100 to 50 while maintaining r at 3.0 leads to a doubling of the slope and the strength of density dependence (Fig. 5.2c). Of course, there are many examples where r and K are not tightly coupled, but it is useful to understand how each parameter influences model predictions independently.

Three graphical examples depicting the relationship between the per capita population growth rate (R) and population abundance (N) under simple (negative) density dependence using the Ricker model: \({N}_{t+1}={N}_{t}{e}^{r\left(1-\frac{{N}_{t}}{K}\right)}\) . In subfigure a, shifting from K1 to K2 while preserving the slope, or “strength,” of the density dependent relationship has the consequence of reducing the intrinsic growth rate (r). In b and c, changes in either r or K while preserving the other results in changes in the density dependent slope, with consequences for population behavior or volatility
5.2 Drivers of Population Volatility
How do the models discussed above help us to understand or predict how real populations behave? In large part, the population dynamics of forest insects (and other organisms) can be understood with three relatively simple modifications of the parameters of Eq. 5.1 or to the nature or shape of endogenous feedback that defines the relationship between N and R. Together, the inclusion of (1) variation in intrinsic growth rates; (2) time-lagged endogenous feedbacks (between N and R); and (3) scramble competition (intraspecific competition defined by all-or-nothing survival or reproduction leading to decelerating non-linearity in the R ~ N function) can produce dynamics that approximate those seen in forest insects.
5.2.1 Variation in the Intrinsic Growth Rate of Populations
Up to this point, we have dealt only with simple (i.e. linear) negative density dependence, which is a useful starting place but is not always a good match with natural populations (Turchin 2003). By changing the strength of density dependence (the slope of the density line, as in Fig. 5.2) we can produce a range of dynamics that approximates the range of dynamics seen in nature (May, 1976). Specifically, increasing the intrinsic growth rate (which as we saw, increases the steepness of the negative density dependent function) moves the dynamic feedback system in the direction of more volatile, complex dynamics. This shift is important from a management perspective, as increases in volatility/complexity inevitably result in lower predictability of populations (Berryman 1987).
Here we will use the mathematical formalizations of density dependent population growth known as the “Ricker model,” originally developed for predicting fisheries stock (Ricker 1954):
where Nt+1 is the abundance in the next timestep, Nt is the current abundance, K is the equilibrium abundance (or carrying capacity) and r is the intrinsic growth rate of the population. Any model (such as this one) that considers changes in population abundance at regular time intervals (i.e. t, t + 1) is referred to as a discrete time model. The interval is arbitrary but usually takes a value with some biological meaning for the population in question, often one year for insects that reproduce annually. Semivoltine (those that take 2 years to develop) or multivoltine species (those with multiple generations per year) can be tracked annually or by using a longer or shorter time step as appropriate. The only requirement is that the tracking interval itself does not change over time. Most discrete time models have continuous time equivalents that employ calculus to model population abundance effectively “continuously,” which is to say over infinitesimally small timesteps. Discrete time models are typically roughly (or precisely) equivalent to their continuous time counterparts, and for simplicity, this chapter presents only discrete time models.
Figure 5.3 shows five distinct outcomes that arise simply as a consequence of varying r, ranging from simple convergence (to the equilibrium abundance, or K) through damped oscillations, simple and complex cycles, to chaos. In this context, simple cycles refer to the situation where populations cycle between two abundances, one on each side of K, while in complex cycles there are four or more abundance values (for example, two high and two low) that repeat for as long as the models are run. The most volatile fluctuations are characterized as chaotic dynamics. All the models discussed are entirely deterministic with no stochastic, or random, elements. Here chaos does not refer to randomness. Rather, it refers to the fact that fluctuations in abundance are highly dependent on initial conditions where even slight differences (i.e. of a few individuals) predict vastly different abundances even a few time steps in the future. Thus, for chaotic systems accurate forecasting is nearly impossible (Hastings 1993).

Depiction of five distinct model behaviors (left) ranging from low to high volatility (or high to low predictability) using the Ricker model: \({N}_{t+1}={N}_{t}{e}^{r\left(1-\frac{{N}_{t}}{K}\right)}\). Corresponding density dependent relationships are shown in the rightmost subfigure. Note that the only difference among the models is the value of little r (which drives the strength of density dependence [negative slope] at constant K, as in Fig. 5.2). Delayed feedbacks and scramble competition are likewise major contributors to population volatility—see text
Although intrinsic growth rates are of clear importance to population dynamics and species with higher intrinsic r values have a greater propensity toward rapid and dramatic changes in abundance, there is little support for the idea that population cycles are mainly a product of high r. To generate population cycles other mechanisms are needed—in particular, trophic dynamics.
5.2.2 Lagged Endogenous Feedbacks
Feedbacks between N and R are termed “endogenous” because not only does the per capita population growth rate (R) largely drive population abundance (N) in the next generation (an obvious and intuitive statement), but N also strongly influences R (Royama 1992). This feedback is the defining feature of endogenous population dynamics. The effects of population abundance on birth and death rates are not always instantaneous, particularly when the ecological mechanisms that drive such feedbacks involve additional species or trophic levels (Hunter and Price 1998). For example, some natural enemy populations (especially enemies that are relatively specialized on the focal prey species) respond to the high abundance of prey with increasing abundance (thereby reducing R for the prey). Changes in predator density in response to prey availability (referred to as a numerical response) are typically characterized by a delay, both in the initiation of population growth and decline as a consequence of prey surplus and scarcity, respectively. Predators may also respond functionally whereby the rate of prey consumption per predator individual (but not necessarily predator abundance) changes in response to changes in prey abundance. This can happen via prey switching or changes in handling efficiency and also involves a delayed, or lagged, response. Bottom-up effects can be lagged too, such as in the case of plant inducible defenses that take time to produce and accumulate. This delay can be generalized by the inclusion of a lagged term as follows:
where R is a function of density (as before), but now the abundance that matters is not the present abundance, but rather the abundance x time steps (or generations) ago. In principle, lags can take any integer value, but in practice, lags of more than 2–3 timesteps in the past seem to be rare in nature (Turchin and Taylor 1992; Hunter and Price 1998). Lags in dynamic feedbacks have the consequence of elevating population volatility and can cause populations to cycle. Indeed, delayed impacts of specialist natural enemies and plant defenses have been regularly implicated as drivers of population cycles in forest insects, especially among defoliators (Liebhold and Kamata 2000). The increasingly volatile dynamics with increasing r values seen in Fig. 5.3 can result in simple or even complex cycles. However, these “first-order” cycles (those that derive from instantaneous feedbacks) have a period (distance between abundance peaks) that is too short to accurately describe oscillations in observed abundance in natural populations, which typically occur on the order of 8–12 years (Liebhold and Kamata 2000). In contrast, second-order feedbacks (those deriving from time delays in the relationship between N and R) can easily produce cyclical dynamics of much longer, biologically realistic time scales.
5.2.3 Scramble Competition
To this point, we have assumed for the sake of simplicity that the relationship between R and N is linear. This need not be the case. Intraspecific competition for resources is an important form of endogenous population regulation that can be modeled effectively under some conditions using the simple, first-order (non-lagged) models presented above. The linear R by N function assumes that organisms begin to compete even when densities are very low and that the effect of incremental increases in density are the same at high densities as they were at low. Neither assumption is unreasonable as a generality, but we know that linear density dependence is not universal. Instead, some populations display scramble competition (Royama 1992; Brännström and Sumpter 2005). Scramble competition refers to the phenomenon where at low to intermediate population densities, available food resources are sufficient for all individuals and should thus correspond to a weakly negative density dependent slope at low abundance values. At high densities, food quickly becomes insufficient for all individuals simultaneously and reduces individual survival and fecundity dramatically. This differs from contest competition where the strongest competitors, or those first to arrive and start feeding, gain sufficient resources while weaker or later-arriving individuals suffer. Scramble competition was famously described by Nicholson (1954) during his studies of sheep blowflies (Lucilia cuprina). Nicholson found stable population cycles when food (sheep brains) was supplied at a constant rate. He determined that blowflies had ample food resources and exhibited high survival and reproduction for a broad range of abundances from near 0 to near K. However, as densities approached and exceeded K, suddenly very few of the fly larvae had adequate food to complete development and therefore many died and few eggs were produced for the next generation. In short, high density populations tended to drop precipitously in abundance, or crash. This resulted in R vs. N being strongly decelerating in the region of K. Equation 5.4 allows for scramble competition of variable strength. Figure 5.4 uses this equation to show effects of varying the strength of nonlinearity in R vs. N.

Examples of nonlinear negative density dependence capturing the phenomenon of scramble competition (Nicholson 1954; May and McLean 2007). Both the density dependent relationship (between R and N) (a) and the resulting time series (b) were modeled using Eq. 5.4 \({N}_{t+1}={N}_{t}{e}^{r\left(1-{\left(\frac{{N}_{t}}{K}\right)}^{b}\right)}\), and the following parameters (r = 1, K = 150, N1 = 1, and either b = 1 [black], b = 2 [red], or b = 3 [blue lines]). Higher values of b correspond to stronger scramble competition (steeper nonlinearities in the R ~ N function in [a])
When b = 1, the equation is equivalent to the Ricker model. As b increases, the R by N function becomes increasingly non-linear (Fig. 5.4a), and with increasingly nonlinear feedbacks comes greater population volatility (Fig. 5.4b).
5.3 Broad Patterns and Real-World Examples
5.3.1 Cyclical Dynamics
Many populations from diverse animal groups display cyclical tendencies, including some small mammals and many forest insects. Often this phenomenon has been attributed to predator–prey dynamics, as with lynx and hare in the Arctic (Stenseth et al. 1999, but see Bryant et al. 1983; Elton and Nicholson 2007), moose on Isle Royale (Post et al. 2002), and lemmings in Scandinavia (Stenseth 1999; Forchhammer et al. 2008). Delayed density dependence arising from top-down pressure from specialist (and sometimes generalist) natural enemies at least partly explains this phenomenon for many forest insects.
Among forest insects, cyclical or outbreak dynamics are disproportionately common among defoliators, especially the Lepidoptera (moths and butterflies), though sawflies and some aphids/adelgids also exhibit similar densities and periodicities (Liebhold and Kamata 2000). Native lepidopterans such as the larch budmoth (Zeiraphera diniana), the autumnal moth (Epirrita autumnata), the winter moth (Operophtera brumata) in Europe, the eastern spruce budworm (Choristoneura fumiferana) and forest tent caterpillar (Malacosoma disstria) in North America have been extensively studied for their cyclic dynamics and their propensity to cause widespread defoliation during outbreak years (Varley et al. 1974; Ginzburg and Taneyhill 1994; Myers and Cory 2013; Pureswaran et al. 2016). Exotic species such as the spongy moth (Lymantria dispar) or the winter moth in North America (where both have been introduced) have also received considerable attention from population ecologists (Liebhold and Kamata 2000; Roland 2007). At least for spongy moth, cyclical outbreaks are evident across certain years (i.e. 1943–1965 and ca. 1978–1996) interspersed with periods of non-cyclical dynamics (Allstadt et al. 2013).
It is important to recognize that population cycles, by virtue of their theoretical interest and practical importance, are likely more ubiquitous in the population dynamics literature than they are in nature. It is only a minority of leaf-eating insects that reach sufficient densities to completely defoliate trees, but nearly half (5 of 11, or ~ 45%) of the foliage-feeding forest insects included in a recent analysis displayed cyclical dynamics (Kendall et al. 1998; Liebhold and Kamata 2000). Cyclical dynamics are especially prevalent in Lepidopteran folivores. The proportion of tree-eating pests with cyclical dynamics dropped to 17% when all feeding guilds were considered (Kendall et al. 1998). Many well studied examples of cyclicity in population dynamics (including the autumnal moth, larch budmoth, and spruce budworm) are cyclical in the northern (poleward) part of their range in the Northern Hemisphere, but not in the southern parts (Ruohomäki et al. 2000). Likewise, historical patterns can be disrupted by changes in climate, host tree abundance or human activities or interventions. In fact, the larch budmoth cycles in parts of the insect’s range (specifically the Tatra Mountains in southern Poland) ceased in 1981, despite tree ring records showing regular outbreaks every 8, 9 or 10 years over the last 12 centuries—a phenomenon that appears to reflect a phase shift driven by increasing temperatures (Iyengar et al. 2016). Understanding the context dependency of cyclicity and the relationship between cyclical dynamics and specific life history traits remains a central challenge for forest entomologists and population ecologists alike.
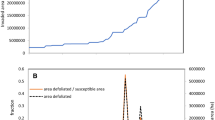
5.3.2 The Larch Budmoth in the European Alps
The larch budmoth (Zeiraphera diniana) (hereafter LBM) exhibits highly regular cycles of 8–10 years in the Swiss Alps (Fig. 5.5) and has been the subject of sustained study. Swiss researchers kept meticulous records over decades (Baltensweiler et al. 1977; Baltensweiler and Fischlin 1988), not only on caterpillar population densities, but also on tree responses to defoliation, as well as parasitism by a suite of over 100 species of parasitoids. Initial hypotheses emphasized parasitoids (especially the suite of eulophid and ichneumon wasps) and infection by a granulosis virus as a mechanism for observed population cycles, but later analyses indicated that fluctuations in parasitism or infection rates were more likely a consequence than a cause of moth density fluctuations (Baltensweiler and Fischlin 1988). Now, it appears that the cycles arise from density-dependent feedbacks involving both host plant quality and parasitoids.

Box 5.1 When K is high. Case study Sirex noctilio in Southern Hemisphere pulp stands and of EAB on native ash in North America and Europe
The word “outbreak” has a specific meaning to population ecologists and to many forest entomologists, particularly those working with species exhibiting cyclical or chaotic dynamics (e.g. some bark beetles and defoliators). However, there is some ambiguity in the application of this term. There are many examples of forest insects that are apparently benign (or even difficult or impossible to find) in their native range that have become major pests when introduced into non-native managed or unmanaged landscapes. However, unlike SPB where high volatility complicates management, exotic pest populations are often relatively stable across years. Such stability simplifies management decisions, though stable populations may still cause considerable damage.
While it is tempting to see large numbers of insects and call it an outbreak, high population densities in pest insects may often be a predictable consequence of an abundance of susceptible host material (Örlander et al. 1997; Stenberg et al. 2010; Wainhouse et al. 2014; Krivak-Tetley et al. 2021). When coupled with a loss of natural enemies (as is the case with many introduced species), populations with large resource bases can become enormous, often as a predictable consequence of planting of susceptible species or genotypes under conditions that favor forest insect growth and survival (i.e. low diversity, high density hosts historically selected for growth and yield, often at the expense of defense). Discerning the effects of increased K stemming from massive increases in habitat or food availability from fluctuations in abundance arising from high r, lagged dynamics, or scramble competition (which can lead to outbreak dynamics; see “Drivers of population volatility” section above) can be critical to predicting population responsiveness to management, including biological control.
For insects that specifically utilize stressed or dying trees as part of their life history, elevated K at a plantation or landscape scale is often a direct consequence of planting practices. For example, in the Southern Hemisphere, North American pines are widely planted, often with extremely high initial planting densities of up to 1,600 stems per hectare. A few years after canopy closure, these trees begin to compete for light and below-ground resources and many experience elevated levels of stress. In the absence of S. noctilio, most trees are able to survive long enough to be harvested and processed. However, once S. noctilio is established (as has happened almost everywhere in the Southern Hemisphere where pine is grown commercially) wasp populations can increase dramatically in high-density pulp stands that contain many trees that are susceptible to wasp attack. Further, because compartments are continually being planted at the same densities, new compartments are regularly becoming stressed and vulnerable to attack. Thus, even as trees are killed, there is no negative feedback to bring populations down. Under a competing, more complex model, there may be an escape threshold, as with SPB, above which S. noctilio can attack and kill larger, healthier trees (Slippers et al. 2014). In the eastern US, where S. noctilio was discovered in 2005, populations grew quickly as wasps effectively attacked overstocked stands of Scots pine (Ayres et al. 2014). Now that this resource has been largely depleted, wasps have become rare and hard to find (Krivak-Tetley et al. 2021), though suppressive effects of native natural enemies and/or competitors may also play a role. Likewise, in Southern Hemisphere timber stands that are regularly thinned to reduce tree competition, wasps are rarely problematic. Similar effects of elevated carrying capacity on the dynamics of populations are evident across numerous managed forest landscapes (Örlander et al. 1997; Stenberg et al. 2010; Wainhouse et al. 2014).
Similar to S. noctilio’s rise and fall in the eastern US, which appears to have tracked the abundance of overstocked pine, other invasive pests also show characteristic boom and bust dynamics that largely track resource availability. Emerald ash borer (EAB) was first detected in North America in Michigan in 2002 (Herms and McCullough 2014). Despite massive quarantine efforts, this insect has now spread to at least 35 states (as of 2021) and has been estimated to have killed over 1 billion ash trees (Fraxinus spp.). In this case it appears that there is very little natural resistance to EAB in the ash trees that are native to North America (Cipollini et al. 2011). Upon arriving in an area, EAB infests virtually all available ash trees, except for those with very small stems, which do not have sufficient phloem area to support gallery formation. As such, EAB populations reach incredibly high densities and then crash once they have killed all the available trees. It remains unknown whether populations will persist on the few escape trees and on smaller stems as they grow and become available to attack or whether EAB will go locally extinct once most of the ash trees are killed. To a large extent, the fate of ash on the continent depends on the long-term, endemic equilibria that establish in the aftermath of invasive spread and may also be influenced by the suite of native and introduced natural enemies that have established. Such is the case with many invasive insects for which high abundance post-arrival is more reflective of transient dynamics, namely a “feeding frenzy” on highly susceptible trees or genotypes on the way to a lower, stable, long-term equilibrium.
In the LBM system, host plant quality appears to change as a function of previous caterpillar density, making it a delayed feedback. Larch trees are deciduous conifers. Trees defoliated in a given year produce leaves in subsequent years that are shorter, less digestible, and contain less protein. Larch foliage becomes less nutritious for LBM populations for 1–4 years post-defoliation. This has consequences for larval survival and adult fecundity, which determine R in the years after defoliation. This feedback is crucial to the moth’s ecology as it introduces 2nd-order (lagged) dynamics that can largely explain population oscillations. In this case, the length of lag associated with each feedback mechanism was also important to the dynamical behavior of LBM; induced effects on food quality persist for up to four years, while parasitism rates principally lag LBM densities by two years.
Interestingly, despite being a classic example of regular outbreak cycles, LBM population behavior abruptly and inexplicably changed around the 1980’s such that these outbreak cycles have disappeared in recent years. Modeling efforts using population estimates from the past 1,200 years (Esper et al. 2007) clearly shows how outbreak epicenters regularly shift up and downslope in response to changes in temperature (Johnson et al. 2010). Recent warming has shifted optimal conditions for LBM population growth to the very edge of the range of host trees, dampening abundance fluctuations and disrupting ecological interactions (i.e. with natural enemies and competitors). In fact, this is among the strongest known examples of a climate change-driven collapse in population behavior (Esper et al. 2007; Johnson et al. 2010).
5.3.3 Tree-Killing Bark Beetles
Numerous species of tree-killing bark beetles also display outbreak dynamics, but the mechanisms appear to be different than for cyclical lepidoptera (Kausrud et al. 2011; Koricheva et al. 2012; Weed et al. 2015). The southern pine beetle (Dendroctonus frontalis; herein SPB) is a classic example of an insect that exhibits wide fluctuations in abundance (Fig. 5.6a). SPB is particularly useful to explore since many aspects of the biology and ecology of this insect have been studied in great detail, in large part because it is a major pest of highly productive pine forests in the southeastern United States (Coulson and Klepzig 2011). In fact, there are numerous species of bark beetles (Subfamily Scolytinae, within the weevil family, Curculionidae) that are important in different regions throughout the world, though the outbreak species are a small minority of the total scolytine fauna (see Chapters 10 and 11). We note that our perception of “importance,” whether ecological or economic, is strongly linked with the propensity of a species to outbreak. Insects with populations that increase to outbreak status are particularly relevant to management since their impacts are often very difficult to predict in both space and time and can be locally or regionally devastating to a resource. Figure 5.6a shows the abundance of SPB infestations from 1958 to 2015. Though this behavior is not unique among the bark beetles, SPB is famous for its ability to rapidly aggregate on pine trees in huge numbers, which allows them to exhaust resin defenses and kill healthy, vigorously growing trees.

The Southern pine beetle is one of the most damaging forest pests in the world. This is due in large part to its potential for outbreak where huge numbers of beetles mass-attack otherwise healthy trees, overcoming resin defenses and killing them, typically within a few weeks. Subfigures depict interannual fluctuations in the abundance of SPB “spots” (aggregations of beetle-killed trees) in Texas from 1958–2016 (a); an SPB adult (actual length = 2–4 mm; b); “pitch tubes,” or resin defenses produced by trees in response to attack (c); aerial photo of an active SPB spot (d); widespread SPB damage that can result when outbreaks are left unmanaged (e). Photo credits (courtesy of forestry-images.com): (5.6b) UGA0013093: USDA Forest Service, USDA Forest Service, Bugwood.org; (5.6c) UGA1929027: Tim Tigner, Virginia Department of Forestry, Bugwood.org; (5.6d) UGA1510001: USDA Forest Service - Region 8 - Southern, USDA Forest Service, Bugwood.org; (5.6e) UGA0007064: Richard Spriggs, USDA Forest Service, Bugwood.org
Local outbreaks of SPB can be observed from the air due to the characteristic formation of beetle “spots,” which are local aggregations of tens to hundreds of dead or dying pine trees that appear red against a sea of green trees/needles (Billings and Ward 1984). Why is it that in some forests in some years there are thousands of SPB spots, while in most forests in most years there are zero? It appears that the answer lies in some interesting population dynamical behavior whereby SPB populations can be regulated around two different equilibria and switch between them at unpredictable intervals (Martinson et al. 2012). More specifically, populations can be regulated at low, “endemic” levels where instead of attacking and killing healthy trees, they utilize primarily lightning-struck or other stressed trees that are at low density on the landscape. Eventually, via chance exogenous effects they exceed a numerical escape threshold (an unstable equilibrium) beyond which their deterministic tendency is to increase to an upper “epidemic” equilibrium. Figure 5.7a depicts this alternative stable states model as it is understood for SPB (Martinson et al. 2012; Weed et al. 2017). The graphical model represents the two stable equilibria as solid black dots and the single unstable equilibrium as an open circle (Fig. 5.7a). Below the escape threshold, populations tend to remain near the lower, endemic equilibrium, while above it, populations tend to “escape” the lower attractor and rise to epidemic equilibrium. The action of these two attractors results in a bi-modal distribution in abundance whereby low and high densities are more common than intermediate densities, which are transitional and rare (Fig. 5.7b).

Hypothesized dual equilibrium or “alternate attractors” model proposed for the Southern pine beetle in Martinson et al. (2012). Subfigure (a) shows the r by N function where two stable equilibria (solid points) represent attractors and predict two distinct abundances around which populations are predicted to fluctuate. An unstable equilibrium (open circle) exists between them and acts as a repellor. A frequency histogram (b) reveals two distinct peaks in expected abundances which correspond conceptually to observed beetle population behavior which tend to fluctuate between either low (endemic) or high (epidemic) abundances
This dynamical behavior is satisfying as it approximates observed abundance distributions. But what forces create these two equilibria and what accounts for the switches between them? The first question is equivalent to asking what drives negative density dependence at lower and then again at higher abundance values. In the case of SPB, it appears that the lower equilibrium is generated by predation by the clerid beetle, Thanasimus dubius, and competition from other bark beetle species (Martinson et al. 2012). The region of positive feedback (corresponding to a positive slope in R vs. N) generates an unstable equilibrium. The equilibrium is referred to as unstable since rather than acting as an attractor in itself, populations below this density tend to be drawn toward the lower attractor and above it to the higher attractor. This abundance value can also be thought of as an “escape threshold.” Above this value there is a range of abundances for which SPB reproductive success continues to improve as there are more and more individuals available to join in mass attacks of their host trees. Switches between alternative stable states require that there also be important exogenous (density-independent) effects on abundance. In the case of SPB, this could come, for example, from changes in the abundance of a bluestain fungus (Ophiostoma minus), which is a powerful antagonist of SPB and whose abundance within trees seems largely independent of SPB abundance (Hofstetter et al. 2006; Weed et al. 2017).
5.3.4 Insect Population Dynamics in Managed Systems
In an increasingly globalized world where (a) high-density and high-yield production systems using a handful of tree species are relied upon to meet growing local, regional and global demand for fiber and fuel; (b) non-native pest insects are accumulating in natural and plantation forests; and (c) climate is changing, leading to shifting geographic ranges and altered dynamics, it is highly likely that managing damaging insects (and pathogens) will be of increasing importance in years to come. While outcomes of b and c above are generally difficult to predict, shifts toward monoculture plantations yield general predictions for short- and long-term impacts on insect populations. Perhaps most salient is the fact that conversion of ecosystems into monospecific production forests tends to increase the K for potential pests of the tree species that is being propagated (Box 5.1). If the K for an insect species exceeds economic damage thresholds (one definition of a pest species), then there may be need for active suppression. Since the natural tendency of populations is to grow toward K when populations are below it, it should be expected that control efforts will need to be sustained indefinitely. At the same time, homogenization of plant species and landscapes in such highly managed forests also tends to decrease K for pollinators, endangered species, generalist natural enemies and other elements of biodiversity. This could lead to an elevated extinction risk, especially where populations exhibit a tendency toward extinction when abundance falls below a minimum threshold. The existence of this extinction threshold, or more specifically the behavior of small populations to tend toward zero, is called an “Allee” effect.
Allee effects refer to the tendency of some populations to exhibit a positive correlation between abundance (N) and per capita growth rates at low population densities (Allee 1932). This region of positive density dependence (where the slope is positive in the R ~ N function; Fig. 5.8) can arise via a suite of ecological mechanisms including cooperative behavior (e.g. herd vigilance, co-operative hunting, or mass attack on host trees), mate finding, or escape from the negative effects of inbreeding, all of which are particularly relevant when populations are small (Liebhold and Tobin 2008). In each case, higher population densities lead to increased per capita contributions to the next generation. In the case of insects, aposematically colored individuals (brightly or conspicuously marked) experience lower predation rates when there are enough individuals for predators to effectively learn the warning signal (Sword 1999). Mate finding can likewise be important and may in part explain the over-representation of parthenogenetic, female-only species or races among invasive populations (Kanarek et al. 2015) which very often experience small population sizes at the time of introduction, or shortly thereafter. In fact, the successful “Slow the Spread” program targeting the spongy moth specifically takes advantage of Allee effects, exploiting the difficulty of individuals to locate mates in small, satellite populations along the advancing front of the regional infestation. Intensive pheromone trap monitoring in these areas can detect incipient populations; aerial or ground-based spraying can then be used to reduce population size to near or below the Allee threshold (open circle; Fig. 5.8), below which the natural tendency of each local population is to go extinct (Liebhold and Tobin 2008, 2010).

Density dependent population growth function showing a region of positive density dependence at low density, or an Allee effect. The lower, unstable equilibrium (open circle) represents the Allee, or extinction threshold. Populations below this threshold trend toward zero abundance. Populations exceeding the Allee threshold are regulated in this case by simple (negative) density dependence at the carrying capacity (K; solid circle)
In addition to changes in the equilibrium abundance, population behavior is predicted to respond to changes in habitat or community. For example, decreases in the abundance of generalist natural enemies can sometimes promote pest problems, not simply via the loss of their suppressive effects, but by altering the feedback system to produce population cycles. Decreases in immediate negative feedbacks (from generalist enemies) could increase the relative importance of delayed negative feedback (from specialist enemies), which may cause increased population volatility and could induce cyclical or outbreak dynamics (Ruohomäki et al. 2000; Klemola et al. 2009). Interestingly, the intentional addition of specialist natural enemies for biological control could, in principle, have similar effects, increasing population volatility. Clear empirical examples or experimental demonstrations of this phenomenon are lacking, however (Myers 2018).
Finally, there is an unusually strong argument for considering active suppression when pest populations have alternative stable states (low abundance and high abundance separated by an unstable equilibrium) such as explained above for SPB. In this case, monitoring of abundance coupled with occasional suppression when populations first approach the escape threshold can hold potential pests at endemic levels (where they are regulated by natural forces) for sustained periods of time (Billings 2011). In contrast, active suppression of populations with naturally cyclical dynamics can theoretically have the undesirable effect of prolonging the outbreak phase by interrupting natural processes (i.e. top-down pressure from natural enemies) that would have led to declines without human intervention.
5.4 Conclusion
Forest insects represent some of the most well-studied organisms in the field of population ecology, due at least in part to their economic and ecological importance and amenability to monitoring and/or historical reconstruction of abundance. The availability of time series spanning decades or even millennia, together with comprehensive mechanistic studies particularly in outbreaking lepidopteran species, form a strong basis for forecasting from which key principles have been derived and tested. In this chapter we have reviewed some of the basic models of simple density dependent regulation, expanding on these ideas to include greater ecological complexity by incorporating lagged and nonlinear feedbacks. We demonstrate how to conceptualize and integrate stochastic variation into these models and discuss a suite of plausible model behaviors that approximate real-world fluctuations in abundance. Through case studies and examples, we explore the dominant ecological drivers of population dynamics in forest insects including interactions with host plants and especially specialist natural enemies that largely drive cyclical dynamics in many forest lepidopteran species. We consider multiple equilibria models or “alternative state” models that effectively approximate Southern pine beetle dynamics, and explore the role and functional form of positive density dependence when populations are small (Allee effects). Finally, we consider how population regulation can be conceptualized in highly managed systems such as high-yield, high-density monoculture plantation settings as well as in “naïve” ecosystems, where insects and trees interact under novel conditions with little co-evolutionary history, most often as a consequence of biological invasion. While this overview reflects many of the basic tenets of a field that has matured considerably, accurate forecasting of insects across time and space still represents a major challenge for forest managers and population ecologists alike, especially given complex, variable and changing environments.
References
Abbott KC, Dwyer G (2008) Using mechanistic models to understand synchrony in forest insect populations: the North American gypsy moth as a case study. Am Nat 172(5):613–624. https://doi.org/10.1086/591679
Allee W (1932) Animal aggregations: a study in general sociology. University of Chicago Press, Chicago
Allstadt AJ, Haynes KJ, Liebhold AM, Johnson DM (2013) Long-term shifts in the cyclicity of outbreaks of a forest-defoliating insect. Oecologia 172(1):141–151. https://doi.org/10.1007/s00442-012-2474-x
Aukema B, Carroll A, Zhu J, Raffa K, Sickley T, Taylor S (2006) Landscape level analysis of mountain pine beetle in British Columbia, Canada: spatiotemporal development and spatial synchrony within the present outbreak. Ecography 29(3):427–441
Ayres MP, Pena R, Lombardo JA, Lombardero MJ (2014) Host use patterns by the European woodwasp, Sirex noctilio, in its native and invaded range. PLoS One 9(3):e90321. https://doi.org/10.1371/journal.pone.0090321
Baltensweiler W, Benz G, Bovey P, Delucchi V (1977) Dynamics of larch bud moth populations. Annu Rev Entomol 22:79–100. https://doi.org/10.1146/annurev.en.22.010177.000455
Baltensweiler W, Fischlin A (1988) The larch budmoth in the Alps. In: Berryman AA (ed) Dynamics of forest insect populations: patterns, causes, implications. Plenum Press, New York, pp 331–351
Behmer ST (2009) Insect herbivore nutrient regulation. Annu Rev Entomol 54:165–187. https://doi.org/10.1146/annurev.ento.54.110807.090537
Berryman A (1987) The theory and classification of outbreaks. In: Barbosa P, Schultz JC (eds.), Insect outbreaks. Academic Press, San Diego, California, USA
Berryman AA (1999). Principles of population dynamics and their application. Stanley Thornes, Cheltenham, U.K
Billings RF (2011). Mechanical control of Southern pine beetle infestations. In: Coulson R, Klepzig KD (eds.), Southern Pine Beetle II, General Technical Report SRS-140 pp 399–413, Asheville, NC: U.S. Forest Service Southern Research Station
Billings RF, Ward JD, (1984) How to conduct a southern pine beetle aerial detection survey. Circular 267, Texas Forest Service (USA).
Brännström Å, Sumpter DJ (2005) The role of competition and clustering in population dynamics. Proc Biol Sci 272(1576):2065–2072. https://doi.org/10.1098/rspb.2005.3185
Bryant J, Chapin F, Klein D (1983) Carbon nutrient balance of boreal plants in relation to vertebrate herbivory. Oikos 40(3):357–368
Cipollini D, Wang Q, Whitehill JGA, Powell JR, Bonello P, Herms DA (2011) Distinguishing defensive characteristics in the phloem of ash species resistant and susceptible to Emerald ash borer. J Chem Ecol 37(5):450–459. https://doi.org/10.1007/s10886-011-9954-z
Coulson RN, Klepzig K (2011) Southern Pine Beetle II, General Technical Report SRS-140. Asheville, NC: U.S. Department of Agriculture Forest Service, Southern Research Station, p. 512 Retrieved from https://www.fs.usda.gov/treesearch/pubs/39017
Elton, C., & Nicholson, M. (2007). The ten-year cycle in numbers of the lynx in Canada. 1–30.
Esper J, Büntgen U, Frank D, Nievergelt D, Liebhold A (2007) 1200 years of regular outbreaks in alpine insects. Proceedings of the Royal Society B: Biol Sci 274(1610):671
Forchhammer MC, Schmidt NM, Hoye TT, Berg TB, Hendrichsen DK, Post E (2008) Population dynamical responses to climate change. In: Advances in ecological research, Vol 40. Elsevier, pp 391–419
Garnas JR, Hurley BP, Slippers B, Wingfield MJ (2012) Biological control of forest plantation pests in an interconnected world requires greater international focus. Int J Pest Manag 58(3):211–223. https://doi.org/10.1080/09670874.2012.698764
Ginzburg L, Taneyhill D (1994) Population cycles of forest Lepidoptera—a maternal effect hypothesis. J Anim Ecol 63(1):79–92
Gotelli NJ (2008) A primer of ecology (4th ed.). Sinauer Associates, Sunderland, Mass
Hastings A, Hom CL, Ellner S, Turchin P, Godfray HCJ (1993) Chaos in ecology—is mother-nature a strange attractor. Annu Rev Ecol Syst 24:1–33. https://doi.org/10.1146/annurev.es.24.110193.000245
Herms DA, McCullough DG (2014) Emerald ash borer invasion of North America: History, biology, ecology, impacts, and management. Annu Rev Entomol 59:13–30. https://doi.org/10.1146/annurev-ento-011613-162051
Hofstetter RW, Cronin JT, Klepzig KD, Moser JC, Ayres MP (2006) Antagonisms, mutualisms and commensalisms affect outbreak dynamics of the Southern pine beetle. Oecologia 147(4):679–691. https://doi.org/10.1007/s00442-005-0312-0
Hunter MD, Price PW (1998) Cycles in insect populations: Delayed density dependence or exogenous driving variables? Ecol Entomol 23:216–222
Hurley BP, Garnas J, Wingfield MJ, Branco M, Richardson DM, Slippers B (2016) Increasing numbers and intercontinental spread of invasive insects on eucalypts. Biol Invasions 18(4):921–933. https://doi.org/10.1007/s10530-016-1081-x
Isaev AS, Soukhovolsky VG, Tarasova OV, Palnikova EN, Kovalev AV (2017) Forest insect population dynamics, outbreaks, and global warming effects. Scrivener Publishing, Beverly, MA
Iyengar SV, Balakrishnan J, Kurths J (2016) Impact of climate change on larch budmoth cyclic outbreaks. Sci Rep 6:1–8. https://doi.org/10.1038/srep27845
Johnson DM, Büntgen U, Frank DC, Kausrud K, Haynes KJ, Liebhold AM, Esper J, Stenseth NC (2010) Climatic warming disrupts recurrent alpine insect outbreaks. Proceedings of the national academy of sciences USA 107(47):20576–20581. https://doi.org/10.1073/pnas.1010270107
Kanarek AR, Webb CT, Barfield M, Holt RD (2015) Overcoming Allee effects through evolutionary, genetic, and demographic rescue. J Biol Dyn 9:15–33. https://doi.org/10.1080/17513758.2014.978399
Kausrud KL, Grégoire JC, Skarpaas O, Erbilgin N, Gilbert M, Økland B, Stenseth NC (2011) Trees wanted—dead or alive! Host selection and population dynamics in tree-killing bark beetles. PLoS One 6(5):e18274. https://doi.org/10.1371/journal.pone.0018274.t001
Kendall B, Prendergast J, Bjornstad ON (1998) The macroecology of population dynamics: taxonomic and biogeographic patterns in population cycles. Ecol Lett 1(3):160–164
Klemola N, Heisswolf A, Ammunet T, Ruohomaki K, Klemola T (2009) Reversed impacts by specialist parasitoids and generalist predators may explain a phase lag in moth cycles: a novel hypothesis and preliminary field tests. Ann Zool Fenn 46(5):380–393
Koricheva, J., Klapwijk, M. J., & Björkman, C. (2012). Life history traits and host plant use in defoliators and bark beetles: implications for population dynamics. In insect outbreaks revisited, pp 175–196 John Wiley & Sons, Ltd
Krivak-Tetley FE, Lantschner MV, Lombardero GJR, Hurley BP, Villacide JM, Slippers B, Corley JC, Liebhold AM, Ayres MP (2021) Aggressive tree killer or natural thinning agent? Assessing the impacts of a globally important forest insect. For Ecol Manage 483:118728
Kurz W, Dymond C, Stinson G, Rampley G, Neilson E, Carroll A, Ebata T, Safranyik L (2008) Mountain pine beetle and forest carbon feedback to climate change. Nature 452(7190):987–990
Liebhold A, Kamata N (2000) Are population cycles and spatial synchrony a universal characteristic of forest insect populations? Popul Ecol 42(3):205–209
Liebhold A, Tobin P (2008) Population ecology of insect invasions and their management. Annu Rev Entomol 53:387–408
Liebhold A, Tobin P (2010) Exploiting the achilles heels of pest invasions: Allee effects, stratified dispersal and management of forest insect establishment and spread. NZ J Forest Sci 40:S25–S33
Martinson SJ, Ylioja T, Sullivan BT, Billings RF, Ayres MP (2012) Alternate attractors in the population dynamics of a tree-killing bark beetle. Popul Ecol 55(1):95–106. https://doi.org/10.1007/s10144-012-0357-y
May R (1976) Simple mathematical models with very complicated dynamics. Nature 261(5560):459–467
May R, McLean AR (2007) Theoretical ecology: principles and applications. OUP Oxford, Oxford, UK
Montoro Girona M, Navarro L, Morin H (2018) A secret hidden in the sediments: Lepidoptera scales. Front Ecol Evol 6. https://doi.org/10.3389/fevo.2018.00002
Myers JH (1988) Can a general hypothesis explain population cycles of forest Lepidoptera? Adv Ecol Res 18:179–242. https://doi.org/10.1016/s0065-2504(08)60181-6
Myers JH (2018) Population cycles: Generalities, exceptions and remaining mysteries. Proc Biol Sci, 285(1875). https://doi.org/10.1098/rspb.2017.2841
Myers JH, Cory JS (2013) Population cycles in forest Lepidoptera revisited. Annu Rev Ecol Evol Syst 44:565–592. https://doi.org/10.1146/annurev-ecolsys-110512-135858
Navarro L, Harvey AE, Ali A, Bergeron Y, Morin H (2018) A Holocene landscape dynamic multiproxy reconstruction: how do interactions between fire and insect outbreaks shape an ecosystem over long time scales? PLoS One 13(10):e0204316. https://doi.org/10.1371/journal.pone.0204316
Nicholson AJ (1954) An outline of the dynamics of animal populations. Aust J Zool 2(1):9–65. https://doi.org/10.1071/Zo9540009
Örlander G, Nilsson U, Nordlander G (1997) Pine weevil abundance on clear-cuttings of different ages: A 6-year study using pitfall traps. Scand J for Res 12(3):225–240. https://doi.org/10.1080/02827589709355405
Post E, Stenseth NC, Peterson RO, Vucetich JA, Ellis AM (2002) Phase dependence and population cycles in a large-mammal predator-prey system. Ecology 83(11):2997–3002
Price PW (2011) Insect ecology: Behavior, populations and communities. Cambridge University Press, Cambridge
Pureswaran DS, Johns R, Heard SB, Quiring D (2016) Paradigms in Eastern spruce budworm (Lepidoptera: Tortricidae) population ecology: a century of debate. Environ Entomol 45(6):1–10. https://doi.org/10.1093/ee/nvw103
Reed DE, Ewers BE, Pendall E (2014) Impact of mountain pine beetle induced mortality on forest carbon and water fluxes. Environ Res Lett, 9(10). doi:https://doi.org/10.1088/1748-9326/9/10/105004
Ricker WE (1954) Stock and recruitment. J Fish Res Board Can 11(5):559–623. https://doi.org/10.1139/f54-039
Rieske LK, Raffa KF (1990) Dispersal patterns and mark-and-recapture estimates of two pine root weevil species, Hylobius pales and Pachylobius picivorus (Coleoptera: Curculionidae). Christmas Tree Plantations. Environ Entomol 19(6):1829–1836. https://doi.org/10.1093/ee/19.6.1829
Roland J (2007) After the decline: what maintains low winter moth density after successful biological control? J Anim Ecol 63:392–398
Royama T (1977) Population persistence and density dependence. Ecol Monogr 47(1):1–35
Royama T (1992) Analytical population dynamics (1st. ed.). Chapman & Hall, London, New York
Ruohomäki K, Tanhuanpää M, Ayres MP, Kaitaniemi P, Tammaru T, Haukioja E (2000) Causes of cyclicity of Epirrita autumnata (Lepidoptera, Geometridae): grandiose theory and tedious practice. Popul Ecol 42:211–223
Schroeder LM (1987) Attraction of the bark beetle Tomicus piniperda to Scots pine trees in relation to tree vigor and attack density. Entomology Experimentalis Et Applicata. 44:53–58
Slippers B, Hurley BP, Wingfield MJ (2014) Sirex woodwasp: a model for evolving management paradigms of invasive forest pests. Annu Rev Entomol. https://doi.org/10.1146/annurev-ento-010814-021118
Sonia S, Morin H, Krause C (2011) Long-term spruce budworm outbreak dynamics reconstructed from subfossil trees. J Quat Sci 26(7):734–738. https://doi.org/10.1002/jqs.1492
Speight MR, Hunter MD, Watt AD, Southwood SR (1999) Ecology of insects: concepts and applications: Wiley-Blackwell.
Stenberg JA, Lehrman A, Björkman C (2010) Uncoupling direct and indirect plant defences: novel opportunities for improving crop security in willow plantations. Agr Ecosyst Environ 139(4):528–533. https://doi.org/10.1016/j.agee.2010.09.013
Stenseth NC (1999) Population cycles in voles and lemmings: density dependence and phase dependence in a stochastic world. Oikos 87(3):427–461
Stenseth NC, Chan KS, Tong H, Boonstra R, Boutin S, Krebs CJ, Post E, O’Donoghue M, Yoccoz NG, Forchhammer MC, Hurrell JW (1999) Common dynamic structure of Canada lynx populations within three climatic regions. Science 285(5430):1071–1073
Strauss S (2001) Benefits and risks of biotic exchange between Eucalyptus plantations and native Australian forests. Austral Ecol 26(5):447–457
Sword GA (1999) Density-dependent warning coloration. Nature 397(6716):217–217. https://doi.org/10.1038/16609
Tenow O, Nilssen AC, Bylund H, Pettersson R, Battisti A, Bohn U, Caroulle F, Ciornei C, Csoka G, Delb H, De Prins W, Glavendekic M, Gninenko YI, Hrasovec B, Matosevic D, Meshkova V, Moraal L, Netoiu C, Pajares J, Rubtsov V, Tomescu R, Utkina I (2013) Geometrid outbreak waves travel across Europe. J Anim Ecol 82(1):84–95. https://doi.org/10.1111/j.1365-2656.2012.02023.x
Trotter RT, Cobb NS, Whitham TG (2002) Herbivory, plant resistance, and climate in the tree ring record: interactions distort climatic reconstructions. Proc Natl Acad Sci 99(15):10197–10202. https://doi.org/10.1073/pnas.152030399
Turchin P (2003) Complex population dynamics: a theoretical/empirical synthesis. Princeton University Press, Princeton, N.J
Turchin P, Taylor A (1992) Complex dynamics in ecological time-series. Ecology 73(1):289–305
Vandermeer JH, Goldberg DE (2013) Population ecology: first principles (Second, edition. Princeton University Press, Princeton
Varley G, Gradwell G, Hassell M (1974) Insect population ecology: an analytical approach
Wainhouse D, Inward DJG, Morgan G (2014) Modelling geographical variation in voltinism of Hylobius abietis under climate change and implications for management. Agric for Entomol 16(2):136–146. https://doi.org/10.1111/afe.12043
Weed AS, Ayres MP, Bentz BJ (2015) Chapter 4 - Population dynamics of bark beetles. In: Hofstetter FEVW (ed) Bark Beetles. Academic Press, San Diego, pp 157–176
Weed AS, Ayres MP, Liebhold AM, Billings RF (2017) Spatio-temporal dynamics of a tree-killing beetle and its predator. Ecography 40(1):221–234. https://doi.org/10.1111/ecog.02046
Williams DW, Long RP, Wargo PM, Liebhold A (2000) Effects of climate change on forest insect and disease outbreaks. Responses of Northern U.S. Forests to Environmental Change. Ecol Stud 139:455–494
Wingfield MJ, Garnas JR, Hajek A, Hurley BP, De Beer ZW, Taerum SJ (2016) Novel and co-evolved associations between insects and microorganisms as drivers of forest pestilence. Biol Invasions 18(4):1045–1056. https://doi.org/10.1007/s10530-016-1084-7
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this chapter

Cite this chapter
Garnas, J.R., Ayres, M.P., Lombardero, M.J. (2023). Forest Insect Population Dynamics. In: D. Allison, J., Paine, T.D., Slippers, B., Wingfield, M.J. (eds) Forest Entomology and Pathology. Springer, Cham. https://doi.org/10.1007/978-3-031-11553-0_5
Download citation
DOI: https://doi.org/10.1007/978-3-031-11553-0_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-11552-3
Online ISBN: 978-3-031-11553-0
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)