
Abstract
Dependences of the equilibrium states of multidimensional dynamical systems on the parameters of the dynamical system in a small neighborhood of their equilibrium values are investigated. Cases of ordinary and bifurcation values of parameters are considered. Asymptotic representations are derived for sensitivity formulae of the equilibrium values of parameters. Stability analysis of the equilibrium states for nonlinear complex systems described by the Landau-type kinetic potential with two order parameters and the Lotka–Volterra model is conducted. Two different rate processes as combinations of in series and in parallel pathways are examined.
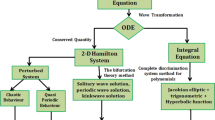
Graphical abstract

Similar content being viewed by others

Data Availability Statement
This manuscript has no associated data or the data will not be deposited. [Authors’ comment: All data generated during this study are contained in this published article.]
References
R.V. Solé, Phase Transitions (Princeton University Press, 2011)
G. Nicolis, C. Nicolis, Foundations of complex systems: nonlinear dynamics, statistical physics, information and prediction (World Scientific Publishing, Singapore, 2007)
H. Haken, Synergetics: An Introduction. Nonequilibrium Phase Transitions and Self-Organization in Physics, Chemistry and Biology (Springer, New York, 1978)
A.A. Barsuk, F. Paladi, J. Stat. Phys. 171, 361 (2018)
A.A. Barsuk, F. Paladi, Physica A 487, 74 (2017)
A.A. Barsuk, F. Paladi, Physica A 569, 125787 (2021)
K. Esat, G. David, T. Poulkas, M. Shein, R. Signorell, Phys. Chem. Chem. Phys. 20, 11598 (2018)
I. Gudyma, V. Ivashko, J. Linares, J. Appl. Phys. 116, 173509 (2014)
I. Gudyma, V. Ivashko, Nanoscale Res. Lett. 11, 196 (2016)
I. Gudyma, K. Boboshko, K. Boukheddaden, Phys. Lett. A 384, 126677 (2020)
R. Arditi, C. Lobri, T. Sari, Theor. Popul. Biol. 106, 45 (2015)
G.M. Fikhtengol`ts, The Fundamentals of Mathematical Analysis. International Series of Monographs on Pure and Applied Mathematics (Pergamon Press, London, 1965)
M.M. Vainberg, V.A. Trenogin, Theory of Branching of Solutions of Non-Linear Equations. Monographs and Textbooks on Pure and Applied Mathematics (Wolters-Noordhoff B.V., Groningen, 1974)
A.A. Barsuk, F. Paladi, Physica A 527, 121303 (2019)
G. Nicolis, C. Nicolis, Physica A 351, 22 (2005)
A.A. Barsuk, V. Gamurari, G. Gubceac, F. Paladi, Physica A 392, 1931 (2013)
C.W. Gardiner, Handbook of stochastic methods: for physics, chemistry and the natural sciences (Springer Series in Synergetics, Berlin, 2004)
A.D. Bazykin, Nonlinear Dynamics of Interacting Populations, series A, vol. 11 (World Scientific Series on Nonlinear Science, Singapore, 1998)
J.D. Murray, Lectures on nonlinear-differential-equation models in biology (Clarendon Press, Oxford, 1977)
R. Bellman, Introduction to Matrix Analysis, Classics in Applied Mathematics, book 19 (Society for Industrial and Applied Mathematics, 1987)
R. Bellman, Stability theory of differential equations, dover books on mathematics (Dover Publications, New York, 2008)
B.P. Demidovich, I.A. Maron, Computational mathematics (Mir Publishers, Moscow, 1981)
Acknowledgements
The authors gratefully acknowledge support provided by the National Agency for Research and Development and the Moldova State University through the Grant number 20.80009.7007.05. FP would also like to thank Prof. Francisco Fernández, Chair of the Natural Sciences Department, and Prof. Tudor Spataru for their invitation and inspiring discussion at the Hostos Community College, City University of New York. Thanks to the anonymous reviewers for their helpful comments and constructive suggestions.
Funding
The funding has been received from National Agency for Research and Development (MD) with Grant no. 20.80009.7007.05.
Author information
Authors and Affiliations
Contributions
AAB: conceptualization, methodology, writing—original draft. FP: conceptualization, formal analysis, writing—review and editing, visualization, project administration.
Corresponding author
Appendices
Appendix 1. Representation of solutions for a system of linear algebraic equations \(A\vec{x} = \vec{b}\) under the conditions \(\det (A) = 0\)
Let us consider the problem of deriving solutions for a system of linear algebraic equations under the assumption that the determinant of the matrix of coefficients of this system vanishes, i.e.
where an \(n \times n\) matrix \(A\) is determined by elements \(a_{ij}\) (\(i,j = 1, \ldots ,n\)), while \(\vec{x} = (x_{1} , \ldots ,x_{n} )\) and \(\vec{b} = (b_{1} , \ldots ,b_{n} )\) are \(n\)-dimensional vectors. We assume that the rank of matrix \(A\), denoted below by \(rank(A)\) is qual to \(r\), while \(0 < r < n\), and for definiteness, without loss of the analysis generality, one can further consider that the determinant of the matrix of coefficients corresponding to the first rth rows and rth columns of the matrix \(A\) is nonzero. We note that this analysis is given earlier in the Ref. [6] and supports here the readability of the article.
The system of Eq. (A1.1) in this case can always be transformed by permutation of rows and columns, and the corresponding renumbering of the variables. For convenience of further discussion, we now give the Eq. (A1.1) in block form, that is
or Eq. (A1.2) in a more detailed notation take the form
where
The first system of equations in (A1.3) can be solved under the condition \(rank(A_{11} ) = r \ne 0\) with respect to the vector of unknowns \(\vec{x}_{1} = (x_{1} , \ldots ,x_{r} )\), that is
After substituting Eq. (A1.4) for determining the vector \(\vec{x}_{1}\) into the second system of equations in (A1.3), we arrive at the following system of equations with respect to the vector of variables \(\vec{x}_{2}\)
Regarding matrix \(D\), one can argue that its rank is zero, and thus this matrix is a \((n - r) \times (n - r)\) matrix with zero elements. This is indeed the case when the assumption \({\text{rank}}(D) \ne 0\) leads to the possibility of solving the system of Eq. (A1.6) with respect to \(\vec{x}_{2}\), if \({\text{rank}}(D) = n - r\), or with respect to a part of the components of the vector \(\vec{x}_{2}\), if condition \(0 < {\text{rank}}(D) < n - r\) is fulfilled. In both cases, along with solutions (A1.5), \(\vec{x}_{1} = (x_{1} , \ldots ,x_{r} )\), we also arrive at solutions with respect to variables \(\vec{x}_{2}\), which contradicts the initial condition \({\text{rank}}(A) = r\). One can consider \(D\vec{x}_{2} = 0\), and thus the system of Eq. (A1.6) can be rewritten as
Equation (A1.7) represents the solvability condition for the system of linear algebraic equations (A1.1) provided that \({\text{rank}}(A) = r < n\).
In order to prove the correctness of Eq. (A1.7), let us analyze the fulfillment of this condition for matrices \(A = \left( {\begin{array}{*{20}c} 1 & 1 \\ 1 & 1 \\ \end{array} } \right)\) and \(A = \left( {\begin{array}{*{20}c} 1 & 1 & 1 \\ 1 & 1 & 1 \\ 1 & 1 & 1 \\ \end{array} } \right)\). One can note in both cases that \({\text{rank}}(A) = 1\). Thus, we have a system of equations (A1.1) in the form \(\left( {\begin{array}{*{20}c} 1 & 1 \\ 1 & 1 \\ \end{array} } \right)\left( {\begin{array}{*{20}c} {x_{1} } \\ {x_{2} } \\ \end{array} } \right) = \left( {\begin{array}{*{20}c} {b_{1} } \\ {b_{2} } \\ \end{array} } \right)\) in the case of the \(2 \times 2\) matrix \(A\) or, in the equivalent form, \(x_{1} + x_{2} = b_{1}\), \(x_{1} + x_{2} = b_{2}\), and, therefore, the system of equations is consistent under the condition \(b_{1} = b_{2}\). In accordance with the general formulation of the solvability condition (A1.7), one can mention that \(A_{11} = A_{12} = A_{21} = A_{22} = 1\), \(\vec{b}_{1} = b_{1}\), \(\vec{b}_{2} = b_{2}\), and we arrive at the fulfillment of solvability condition \(b_{1} = b_{2}\) for the considered system of equations. Meanwhile, the system of equations (A1.1) can be written in the form \(\left( {\begin{array}{*{20}c} 1 & 1 & 1 \\ 1 & 1 & 1 \\ 1 & 1 & 1 \\ \end{array} } \right)\left( {\begin{array}{*{20}c} {x_{1} } \\ {x_{2} } \\ {x_{3} } \\ \end{array} } \right) = \left( {\begin{array}{*{20}c} {b_{1} } \\ {b_{2} } \\ {b_{3} } \\ \end{array} } \right)\) in the case of the \(3 \times 3\) matrix \(A\) or, in the equivalent form, \(x_{1} + x_{2} + x_{3} = b_{1}\), \(x_{1} + x_{2} + x_{3} = b_{2}\), \(x_{1} + x_{2} + x_{3} = b_{3}\), and, therefore, the system of equations is consistent under the condition \(b_{1} = b_{2} = b_{3}\). In accordance with the general formulation of the solvability condition (A1.7), one can also mention that \(A_{11} = 1\), \(\vec{b}_{1} = b_{1}\), \(A_{12} = (1,\;1)\), \(A_{21} = \left( {\begin{array}{*{20}c} 1 \\ 1 \\ \end{array} } \right)\), \(A_{22} = \left( {\begin{array}{*{20}c} 1 & 1 \\ 1 & 1 \\ \end{array} } \right)\), \(\vec{b}_{2} = \left( {\begin{array}{*{20}c} {b_{2} } \\ {b_{3} } \\ \end{array} } \right)\), and we arrive at the fulfillment of corresponding solvability condition \(\vec{b}_{2} - A_{21} A_{11}^{ - 1} \vec{b}_{1} = \vec{b}_{2} - \left( {\begin{array}{*{20}c} 1 \\ 1 \\ \end{array} } \right)b_{1} = 0\) or \(b_{1} = b_{2} = b_{3}\) for the considered system of equations. Thus, one can conclude that this result coincides, as it should be, with the solvability condition obtained by direct calculations.
Appendix 2. Construction of small solutions for systems of nonlinear equations depending on parameters
Let us consider a system of \(n\) order nonlinear equations with respect to the variables \(x_{1} , \ldots ,x_{n}\), and depending on \(m\) parameters \(y_{1} , \ldots ,y_{m}\), that is
It is assumed that zero values of variables \(x_{1} , \ldots ,x_{n}\) and parameters \(y_{1} , \ldots ,y_{m}\) satisfy the system of equations (A2.1), i.e.
In the range of parameter changes \(\left| {y_{j} } \right| < < 1\) (\(j = 1, \ldots ,m\)), it is required to find the solutions \(x_{1} = x_{1} (y_{1} , \ldots ,y_{m} )\), …, \(x_{n} = x_{n} (y_{1} , \ldots ,y_{m} )\) satisfying conditions (A2.2). Such solutions are called small solutions. Thus, in a small neighborhood of zero values for the variables \(x_{1} , \ldots ,x_{n}\) and parameters \(y_{1} , \ldots ,y_{m}\), the following relations hold
In the form of power series expansion of functions \(f_{i} (x_{1} , \ldots ,x_{n} ;y_{1} , \ldots ,y_{m} )\) (\(i = 1, \ldots ,n\)) in terms of the variables \(x_{1} , \ldots ,x_{n}\), \(y_{1} , \ldots ,y_{m}\), one can represent the system of nonlinear equations (A2.1) in the matrix form with an explicit separation of linear terms in variables \(x_{1} , \ldots ,x_{n}\) and parameters \(y_{1} , \ldots ,y_{m}\), that is
where
Note that function \(\vec{F}\left( {\vec{x},\vec{y}} \right)\) in Eq. (A2.3) is determined by the expression
and have a higher order of smallness with respect to the linear terms in Eq. (A2.3). The expression for the main part of the asymptotic representation of the dependence (A2.5) is given by
In analyzing small solutions of the system of equations (A2.3), it is of interest to elucidate both cases when the rank of the matrix \(A\) is equal to the order of the system of equations (A2.3), i.e. \({\text{rank}}(A) = n\), and, respectively, when the rank of this matrix is less than the order of the system of equations (A2.3), that is \({\text{rank}}(A) < n\).
Construction of small solutions for systems of nonlinear equations depending on parameters in the case of \({\text{rank}}(A) = n\).
In this case, i.e. \({\text{rank}}(A) = n\), there is an inverse matrix \(A^{ - 1}\), and the system of nonlinear equations (A2.3) can be represented in an equivalent form
We use the iterative procedure to determine solutions of the system of equations (A2.6), that is
One can note that in the small neighborhood of zero values for the variables \(x_{1} , \ldots ,x_{n}\) and parameters \(y_{1} , \ldots ,y_{m}\), the iterative procedure (A2.7) is convergent, i.e. it leads to a precise solution of the system of equations if \(k \to \infty\), and thus we have \(\vec{x}(\vec{y}) = \mathop {\lim }\limits_{k \to \infty } \vec{x}_{k} (\vec{y})\).
Let us indeed consider the system of nonlinear equations in the form
Note that the system of nonlinear equations of an arbitrary form can be represented in such a way. It is known that the iterative procedure of solving the system of nonlinear equations (A2.8)
converges to some solution of the system of equations (A2.8) when satisfying conditions [22]
In this case, the effectiveness of the iterative procedure increases with a decrease in the values \(\left| {\frac{{\partial \phi_{i} }}{{\partial x_{k} }}} \right|\). In the case of the iterative procedure (A2.7) for the system of nonlinear equations (A2.6), i.e. \(\vec{\phi }(\vec{x};\vec{y}) = - \left( {A^{ - 1} B\vec{y} + A^{ - 1} \vec{F}\left( {\vec{x},\vec{y}} \right)} \right)\), the conditions of convergence (A2.9) of the iterative process, due to the structure of dependences \(\vec{F}\left( {\vec{x},\vec{y}} \right)\), is carried out fast due to satisfying conditions \(\sum\limits_{k = 1}^{n} {\left| {\frac{{\partial \phi_{i} }}{{\partial x_{k} }}} \right| < < 1}\) (\(i = 1, \ldots ,n\)), and thus the iterative procedure (A2.7) is effective.
In particular, taking the zero values of variables \(\vec{x}_{0} = 0\) as an initial approximation and using the iterative procedure (A2.7), we have the approximate solutions that correspond to the first two iterations in the form
Note that with an increase in the number of iterations, the solution becomes more precise due to the appearance of terms as quantities of higher order of smallness in the expansion. We will now proceed from the expression for \(\vec{x}_{2} (\vec{y})\) in Eq. (A2.10) and the asymptotic representation (A2.5) for dependencies \(\vec{F}\left( {\vec{x},\vec{y}} \right)\), and, keeping in further analysis the small values \(\vec{x}(\vec{y})\) in the asymptotic representation with an assumed degree of accuracy of the second order of smallness, we arrive, as a result, at the desired degree of accuracy in the asymptotic representation for small solutions of the system of nonlinear equations (A2.4) in the form
Note that the main part of the asymptotic representation (A2.11) has the form
and corresponds to the exact solution of the system of linear equations \(A\vec{x} = - B\vec{y}\), provided that \(\det (A) \ne 0\).
Construction of small solutions for systems of nonlinear equations depending on parameters in the case of \({\text{rank}}(A) < n\).
Let us now turn to the construction of small solutions for the system of nonlinear equations (A2.3) in the case when the determinant of matrix \(A\) goes to zero, and its rank is \(rank(A) = r < n\), and, therefore, we represent the matrices \(A\) and \(B\), and vectors \(\vec{x}\), \(\vec{y}\) and \(\vec{F}\) in the block form
where
Note that if the number of independent parameters \(y_{1} , \ldots ,y_{m}\) is less than the rank of matrix \(A\), i.e. \(m < rank(A) = r\), then the matrices \(B_{12} = 0\), \(B_{21} = 0\) and \(B_{22} = 0\).
For convenience of the further presentation in this section, we represent the system of nonlinear equations (A2.3) taking into account Eq. (A2.12), that is, matrices \(A\) and \(B\), and vectors \(\vec{x}\), \(\vec{y}\) and \(\vec{F}\) are written in the block form
or Eq. (A2.14) is given in a more detailed notation as follows
By construction \(rank(A_{11} ) = r\), and thus there is an inverse matrix \(A_{11}^{ - 1}\), taking which into account the first expression in Eq. (A2.15) can be represented in an equivalent form
and, taking into account Eq. (A2.16), the second expression is given by
where \(D = A_{22} - A_{21} A_{11}^{ - 1} A_{12}\). One can consider in complete analogy with the analysis given in Appendix 1 that the rank of matrix \(D\) is zero, and thus all the elements of this matrix vanish. The system of equations (A2.17) is essentially simplified in this case, so it takes the form
One should consider that, as a result of solving the system of nonlinear equations (A2.16) using the converging iterative procedure (A2.5), we come to the dependence \(\vec{x}_{1} = \vec{x}_{1} (\vec{x}_{2} ;\vec{y}_{1} ,\vec{y}_{2} )\), after substitution of which in Eq. (A2.18), one can write the system of nonlinear equations regarding the variables \(\vec{x}_{2}\) or \(x_{r + 1} , \ldots ,x_{n}\) in the case of a complete set of variables. Solutions of nonlinear system (A2.18) with respect to these variables are some functions of parameters \(y_{1} , \ldots ,y_{m}\), i.e.
Keeping the small values up to the second order of smallness with respect to variables \(\vec{x}_{2}\) and parameters \(\vec{y}\), the system of equations (A2.18) can be represented in a form without explicit expressions for coefficients \(a_{ij} ,\;b_{ij} ,\;c_{ij} ,\;d_{ij}\), that is
Since \(\left| {x_{i} } \right| < < 1\) and \(\left| {y_{i} } \right| < < 1\), then the relations \(\left| {y_{i} y_{j} } \right| < < (\left| {y_{i} } \right|,\;\left| {y_{j} } \right|)\) and \(\left| {x_{r + i} y_{j} } \right| < < \left| {y_{i} } \right|\) are valid, and, taking into account only the main part in the asymptotic representation, the system of equations (A2.19) can be rewritten accordingly as
Based on the structure of the system of equations (A2.20), we arrive at an important conclusion on the nature of the dependence on parameters for the solutions of this system. First of all, we note that if the quantities \(x_{r + i} = x_{r + i} (y_{1} , \ldots ,y_{m} )\) (\(i = 1, \ldots ,n - r\)) satisfy the system of equations (A2.20), then the same system has the solutions \(x_{r + i} = - x_{r + i} (y_{1} , \ldots ,y_{m} )\), and thus the bifurcation of solutions of the system of equations (A2.3) occurs at zero values of parameters \(y_{1} , \ldots ,y_{m}\). Along with this, one can mention that the dependencies \(x_{r + i} = x_{r + i} (y_{1} , \ldots ,y_{m} )\) are not analytical regarding the parameters, i.e. these solutions cannot be represented in the form of power series expansion in terms of the integer powers of parameters \(y_{1} , \ldots ,y_{m}\). Indeed, Eq. (A2.20) is transformed to the identities regarding the parameters \(y_{1} , \ldots ,y_{m}\) by subsequent substitution of these expansions into the equation, and, under the assumption of the fulfillment of conditions with respect to these identities, we come to a conclusion that all coefficients \(d_{ij}\) in Eq. (A2.20) must vanish.
The system of equations (A2.20) can be represented for convenience in an equivalent form in some cases to analyze the solutions of this system
or in the form of a system of homogeneous linear equations
For the existence of nonzero solutions of the system of equations (A2.22), the determinant of this system must vanish, i.e.
Equation (A2.23) represents a condition for determining the range of values for the parameters of the system under consideration, for which there are solutions of the system of equations (A2.20) (or Eq. (A2.21)).
Let us turn further to a more detailed analysis of the characteristics of solutions of the nonlinear system of equations (A2.20) based on parameters \(y_{1} , \ldots ,y_{m}\) for a number of cases allowing to perform an exhaustive analysis of solutions of this system, and for often encountered cases when studying specific dynamical systems. First of all, we analyze solutions of the systems defined by Eq. (A2.20) depending only on one parameter \(y\). In this case, Eq. (A2.20) is written as
In accordance with the non-analytical character of the dependencies \(x_{r + i} = x_{r + i} (y)\) (\(i = 1, \ldots ,n - r\)) on parameter \(y\), we investigate these dependencies in the form of power series
After substitution of Eq. (A2.25) into Eq. (A2.24), the system of algebraic equations (A2.24) turns into an identity regarding the parameter \(y\), based on the fulfillment of which we come to the conditions for determining the coefficients \(\varepsilon_{i1} ,\varepsilon_{i2} , \ldots\) and \(\alpha_{i1} ,\alpha_{i2} , \ldots\) In particular, as a result of an analysis of the expressions obtained in this way, we find \(\varepsilon_{i1} = \frac{1}{2}\), \(\alpha_{ij} = 0\,\,(j \ge 2)\), \(i = 1, \ldots ,n - r\), while the values of the coefficients \(\alpha_{i1}\) are determined by solving the system of equations no longer depending on the parameter \(y\), that is
Thus, as a result, we conclude on the character of the dependence on the parameter \(y\) for solutions of the system of nonlinear equations (A2.24) as follows
where \(k\) is the number of solutions of the nonlinear system (A2.26), while the values \(\alpha_{i1}^{s}\) are determined as a result of solving the system of equations (A2.26) and represent one of the solutions.
Let us now turn to a more detailed analysis of solutions of the system of equations (A2.20) in the case when the matrix in Eq. (A2.3) has a rank \(r = {\text{rank}}(A) = n - 1\). We emphasize that this case is the most common among matrices satisfying condition \(\det (A) = 0\), since the diversity of matrices \(A\) having a rank \(r = n - 1\) is significantly larger than the variety of matrices \(A\) having a smaller rank (\(r < n - 1\)). In accordance with the general representations of the matrices and vectors shown in Eqs. (A2.12) and (A2.13) in the case under consideration, the matrix \(A_{22}\), the vector of unknowns \(\vec{x}_{2}\), and the vector function \(\vec{F}_{2} (\vec{x},\vec{y})\) contain only one component and can be represented as
The system of equations (A2.20) is reduced to a single equation with respect to the variable \(x_{n}\), that is
Thus, as a result, we conclude that there is a bifurcation of solutions with respect to the variable \(x_{n}\)
and, taking into account Eq. (A2.16), we find that the variables \(x_{1} , \ldots ,x_{n - 1}\) have bifurcations due to the dependencies (A2.28).
Finally, we turn now to a more detailed analysis of the solutions for the system of equations (A2.20) in the case when the matrix \(A\) in Eq. (A2.3) has a rank \(r = {\text{rank}}(A) = n - 2\). The system of equations (A2.20) can be written in the form (see Eq. (A2.21))
From the second equation of the reduced system, we have a representation for \(x_{n - 1}\) in the form
after the substitution of which in the first equation, we arrive at a biquadratic equation with respect to the variable \(x_{n}\)
solutions of which are presented in the form
The values of variable \(x_{n - 1}\) corresponding to the solutions (A2.31) are calculated according to Eq. (A2.30), and, as a result, we arrive at four solutions for the system of nonlinear equations (A2.29), that is
Rights and permissions
About this article

Cite this article
Barsuk, A.A., Paladi, F. Sensitivity analysis of the equilibrium states of multi-dimensional dynamical systems for ordinary and bifurcation parameter values. Eur. Phys. J. B 95, 54 (2022). https://doi.org/10.1140/epjb/s10051-022-00276-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjb/s10051-022-00276-2