
Abstract
Understanding of spatiotemporal patterns arising in invasive species spread is necessary for successful management and control of harmful species, and mathematical modeling is widely recognized as a powerful research tool to achieve this goal. The conventional view of the typical invasion pattern as a continuous population traveling front has been recently challenged by both empirical and theoretical results revealing more complicated, alternative scenarios. In particular, the so-called patchy invasion has been a focus of considerable interest; however, its theoretical study was restricted to the case where the invasive species spreads by predominantly short-distance dispersal. Meanwhile, there is considerable evidence that the long-distance dispersal is not an exotic phenomenon but a strategy that is used by many species. In this paper, we consider how the patchy invasion can be modified by the effect of the long-distance dispersal and the effect of the fat tails of the dispersal kernels.










Similar content being viewed by others

Notes
Note that the strong Allee effect is not a necessary condition of patchy invasion in multi-species systems, cf. Morozov et al. (2008).
But see Kot and Schaffer (1986) where the conditions of diffusive instability were obtained for the kernel-based model described by an integro-difference equation.
For the sake of brevity, we do not show the distribution of predator as it exhibits features similar to the distribution of prey.
References
Allen LSJ (2007) An introduction to mathematical biology. Pearson Prentice Hall, Upper Saddle River
Andersen M (1991) Properties of some density-dependent integrodifference equation population models. Math Biosci 104:135–157
Andow DA, Kareiva PM, Levin SA, Okubo A (1990) Spread of invading organisms. Landsc Ecol 4:177–188
Burden RL, Faires JD (2005) Numerical analysis. Thomson Brooks/Cole, Belmont
Champeney DC (1973) Fourier transforms and their physical applications. Academic Press, New York
Chen X (1997) Existence, uniqueness, and asymptotic stability of traveling waves in nonlocal evolution equations. Adv Differ Equ 2:125–160
Clark JS, Lewis MA, Horvath L (2001) Invasion by extremes: population spread with variation in dispersal and reproduction. Am Nat 157:537–554
Dale MRT, Mah M (1998) The use of wavelets for spatial pattern analysis in ecology. J Veg Sci 9:805–814
Davis MB, Calcote RR, Sugita S, Takahara H (1998) Patchy invasion and the origin of a Hemlock–Hardwoods forest mosaic. Ecology 79:2641–2659
Duda RO, Hart PE, Stork DG (2001) Pattern classification, 2nd edn. Wiley, New York
Davis HG, Taylor CM, Civille JC, Strong DR (2004) An Allee effect at the front of a plant invasion: spartina in a Pacific estuary. J Ecol 92:321–327
De Jager M, Weissing FJ, Herman PMJ, Nolet BA, van de Koppel J (2011) Levy walks evolve through interaction between movement and environmental complexity. Science 332:1551–1553
Dwyer G (1992) On the spatial spread of insect pathogens: theory and experiment. Ecology 73:479–494
Fisher R (1937) The wave of advance of advantageous genes. Ann Eugenics 7:355–369
Garnier J (2011) Accelerating solutions in integro-differential equations. SIAM J Math Anal 43:1955–1974
Garnier J, Hamel F, Roques L (2012) Success rate of a biological invasion and the spatial distribution of the founding population. Bull Math Biol 74:453–473
Hastings A (1996) Models of spatial spread: a synthesis. Biol Conserv 78:143–148
Hastings A, Harisson S, McCann K (1997) Unexpected spatial patterns in an insect outbreak match a predator diffusion model. Proc R Soc Lond B 264:1837–1840
Hastings A, Cuddington K, Davies KF, Dugaw CJ, Elmendorf S, Freestone A, Harrison S, Holland M, Lambrinos J, Malvadkar U, Melbourne BA, Moore K, Taylor C, Thomson D (2005) The spatial spread of invasions: new developments in theory and evidence. Ecol Lett 8:91–101
Hengeveld R (1989) Dynamics of biological invasion. Chapman and Hall, London
Heinsalu E, Hernández–García E, Lopez C (2010) Spatial clustering of interacting bugs: levy flights versus Gaussian jumps. Europhys Lett 92:40011
Holmes EE, Lewis MA, Banks JE, Veit RR (1994) Partial differential equations in ecology: spatial interactions and population dynamics. Ecology 75:17–29
Jankovic M, Petrovskii S (2013) Gypsy moth invasion in North America: a simulation study of the spatial pattern and the rate of spread. Ecol Complex 14:132–144
Johnson DM, Liebhold AM, Tobin PC, Bjornstad ON (2006) Allee effects and pulsed invasion by the gypsy moth. Nature 444:361–363
Kareiva PM (1983) Local movement in herbivorous insects: applying a passive diffusion model to mark-recapture field experiments. Oecologia 57:322–327
Klafter J, Sokolov IM (2005) Anomalous diffusion spreads its wings. Phys World 18:29–32
Kolmogorov AN, Petrovsky IG, Piskunov NS (1937) Investigation of the equation of diffusion combined with increasing of the substance and its application to a biology problem. Bull Moscow State Univ Ser A Math Mech 1(6):1–25
Kopell N, Howard LN (1981) Target patterns and horseshoes from a perturbed central-force problem: some temporally periodic-solutions to diffusion-reaction equations. Stud Appl Math 64(1):1–56
Kot M, Schaffer WM (1986) Discrete-time growth-dispersal models. Math Biosci 80:109–136
Kot M, Lewis MA, van der Driessche P (1996) Dispersal data and the spread of invading organisms. Ecology 77:2027–2042
Lewis MA (2000) Spread rate for a nonlinear stochastic invasion. J Math Biol 41:430–454
Lewis MA, Kareiva P (1993) Allee dynamics and the spread of invading organisms. Theor Popul Biol 43:141–158
Lewis MA, Pacala S (2000) Modeling and analysis of stochastic invasion processes. J Math Biol 41:387–429
Lewis MA, Neubert MG, Caswell H, Clark J, Shea K (2006) A guide to calculating discrete-time invasion rate from data. In: Cadotte MW, McMahon SM, Fukami T (eds) Conceptual ecology and invasion biology: reciprocal approaches to nature. Springer, New York, pp 69–192
Liebhold AM, Tobin PC (2006) Growth of newly established alien populations: comparison of North American gypsy moth colonies with invasion theory. Popul Ecol 48:253–262
Liebhold AM, Halverson JA, Elmes GA (1992) Gypsy moth invasion in North America: a quantitative analysis. J Biogeogr 19:513–520
Malchow H, Petrovskii SV, Venturino E (2008) Spatiotemporal patterns in ecology and epidemiology: theory, models, simulations. CRC Press, Boca Raton
Medlock J, Kot M (2003) Spreading disease: integro-differential equations old and new. Math Biosci 184(2):201–222
Mistro DC, Rodrigues LAD, Petrovskii SV (2012) Spatiotemporal complexity of biological invasion in a space- and time-discrete predator–prey system with the strong Allee effect. Ecol Complex 9:16–32
Morozov A, Petrovskii S (2009) Excitable population dynamics, biological control failure, and spatiotemporal pattern formation in a model ecosystem. Bull Math Biol 71:863–887
Morozov AY, Petrovskii SV, Li BL (2004) Bifurcations and chaos in a predator-prey system with the Allee effect. Proc Roy Soc Lond B 271:1407–1414
Morozov A, Petrovskii S, Li BL (2006) Spatiotemporal complexity of patchy invasion in a predator–prey system with the Allee effect. J Theor Biol 238:18–35
Morozov A, Ruan S, Li BL (2008) Patterns of patchy spread in multi-species reaction–diffusion models. Ecol Complex 5:313–328
Mundinger PC, Hope S (1982) Expansion of the winter range of the House Finch: 1947–79. Am Birds 36:347–353
Nayfeh AH, Balachandran B (1995) Applied nonlinear dynamics. Wiley, New York
Neubert MG, Kot M, Lewis MA (1995) Dispersal and pattern formation in a discrete-time predator-prey model. Theor Popul Biol 48:7–43
Nussbaumer HJ (1982) Fast Fourier transform and convolution algorithms. Springer, New York
Okubo A (1980) Diffusion and ecological problems: mathematical models. Springer, Berlin
Okubo A, Levin S (2001) Diffusion and ecological problems: modern perspectives. Springer, Berlin
Parker IM (2004) Mating patterns and rates of biological invasion. PNAS 101:13695–13696
Petrovskii SV, Li BL (2006) Exactly solvable models of biological invasion. CRC Press, Boca Raton
Petrovskii SV, Malchow H (2001) Wave of chaos: new mechanism of pattern formation in spatio-temporal population dynamics. Theor Popul Biol 59:157–174
Petrovskii SV, McKay K (2010) Biological invasion and biological control: a case study of the gypsy moth spread. Asp Appl Biol 104:37–48
Petrovskii SV, Li BL, Malchow H (2003) Quantification of the spatial aspect of chaotic dynamics in biological and chemical systems. Bull Math Biol 65:425–446
Petrovskii SV, Morozov AY, Venturino E (2002) Allee effect makes possible patchy invasion in a prey–predator system. Ecol Lett 5:345–352
Petrovskii S, Petrovskaya N, Bearup D (2014) Multiscale approach to pest insect monitoring: random walks, pattern formation, synchronization, and networks. Phys Life Rev 11:467–525
Petrovskii SV, Malchow H, Hilker FM, Venturino E (2005) Patterns of patchy spread in deterministic and stochastic models of biological invasion and biological control. Biol Invasions 7:771–793
Pimentel D (2002) Biological invasions: economic and environmental costs of alien plant, animal and microbe species. CRC Press, New York
Press WH, Teukolsky SA, Vetterling WT, Flannery BP (2007) Numerical recipes: the art of scientific computing, 3rd edn. Cambridge University Press, New York
Ranta E, Lundberg P, Kaitala V (2005) Ecology of populations. Cambridge University Press, Cambridge
Rodrigues LAD, Mistro DC, Petrovskii SV (2012) Pattern formation in a space- and time-discrete predator-prey system with a strong Allee effect. Theor Ecol 5:341–362
Sakai AK, Allendorf FW, Holt JS, Lodge DM, Molofsky J, With KA, Baughman S, Cabin RJ, Cohen JE, Ellstrand NC, McCauley DE, O’Neil P, Parker IM, Thompson JN, Weller SG (2001) The population biology of invasive species. Ann Rev Ecol Syst 32:305–332
Segel LA, Jackson JL (1972) Dissipative structure: an explanation and an ecological example. J Theor Biol 37:545–559
Sherratt JA, Lewis MA, Fowler AC (1995) Ecological chaos in the wake of invasion. Proc Natl Acad Sci USA 92:2524–2528
Sherratt JA, Eagan BT, Lewis MA (1997) Oscillations and chaos behind predator-prey invasion: mathematical artifact or ecological reality? Philos Trans R Soc Lond B 352:21–38
Shigesada N, Kawasaki K (1997) Biological invasions: theory and practice. Oxford University Press, Oxford
Shigesada N, Kawasaki K, Takeda Y (1995) Modelling stratified diffusion in biological invasions. Am Nat 146:229–251
Skellam JG (1951) Random dispersal in theoretical populations. Biometrika 38:196–218
Strogatz SH (2000) Nonlinear dynamics and chaos: with applications to physics, biology, chemistry and engineering. Perseus Books, Reading MA
Taylor CM, Davis HG, Civille JC, Grevstad FS, Hastings A (2004) Consequences of an Allee effect in the invasion of a Pacific estuary by Spartina alterniflora. Ecology 85:3254–3266
Tobin PC, Blackburn LM (2008) Long-distance dispersal of the gypsy moth (Lepidoptera: Lymantriidae) facilitated its initial invasion of Wisconsin. Environ Entomol 37(1):87–93
Turchin P (1998) Quantitative analysis of movement. Sinauer, Sunderland
U.S. Congress, Office of Technology Assessment (1993) Harmful non-indigenous species in the United States. OTA-F-565. U.S. Government Printing Office, Washington DC
Viswanathan GM, Buldyrev SV, Havlin S, da Luz MGE, Raposo EP, Stanley HE (1999) Optimizing the success of random searches. Nature 401:911–914
Viswanathan GM, da Luz MGE, Raposo EP, Stanley HE (2011) The physics of foraging: an introduction to random searches and biological encounters. Cambridge University Press, Cambridge UK
Vitousek PM, D’Antonio CM, Loope LL, Westbrooks R (1996) Biological invasions as global environmental change. Am Sci 84:468–478
Wang MH, Kot M, Neubert MG (2002) Integrodifference equations, Allee effects and invasions. J Math Biol 44:150–168
Williamson MH (1996) Biological invasions. Chapman & Hall, London
Wilder JW, Christie I, Colbert JJ (1995) Modelling of two-dimensional spatial effects on the spread on forest pests and their management. Ecol Model 82:287–298
With KA (2002) The landscape ecology of invasive spread. Consv Biol 16:1192–1203
Acknowledgments
This work was partially supported by FAPERGS Grant n.2199 12-1.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Details of numerical integration
1.1 Boundary Conditions, Stationary Case
For the purposes of this paper, we need a boundary condition as non-intrusive as possible in order to minimize the boundary effect on the population dynamics in the interior of the domain. Since the kernel-based model is non-local, the relevant boundary condition is expected to be non-local as well.
Consider the normally distributed symmetrical kernel in the 1D domain \(\Omega \):
where \((x,y) \in \Omega \). In the context of individual organism’s movement, the dispersal kernel k(x, y) gives the probability density of the event that an individual located at the position y before the dispersal will be found at the position x after the dispersal, and parameter \(\alpha \) quantifies the spatial scale of the dispersal. We therefore require that the total probability is
The boundary can be regarded as non-intrusive when the requirement (34) holds at any point in the computational domain \(\Omega \). However, it is obviously not so when x is sufficiently close to the domain’s boundary regardless the size of the domain, see Fig. 11.

In order to understand how the problem should be modified in order to make sure that condition (34) holds everywhere in the computational domain, we now consider the 1D domain \(\Omega =[-L,L]\). From (33) and (34), we obtain:
where \(\text{ erf }(\xi )\) is the error function. Clearly, in order to satisfy (34), we need to ensure that \(\text{ erf }\left( (L-x)/(\sqrt{2}\alpha )\right) \approx 1\) and \(\text{ erf }\left( (L+x)/(\sqrt{2}\alpha )\right) \approx 1\) with sufficient precision.
We recall that \(\text{ erf }(-\xi )=-\text{ erf }(\xi )\), and \(\text{ erf }(\xi )\) is a monotone function of its argument \(\xi \), \(\text{ erf }(\xi ) \rightarrow 1\) as \(\xi \rightarrow \infty \). It is well known that \(\text{ erf }(\xi )\) is very close to 1 for \(\xi \ge 3\), as we have \(\text{ erf }(3)=0.99998\). Hence, we require that
in order to make \(P \approx 1\) with sufficient precision. That can be achieved by performing the integration on a smaller domain, i.e., \(x \in [-L+3\sqrt{2}\alpha , L-3\sqrt{2}\alpha ]\). Alternatively, however, if our domain of interest is \([-L,L]\), we can consider an extended domain \(\Omega _\mathrm{ext}\) where the integration is performed. From the conditions (35), it is obvious that the extended domain preserving the condition (34) with sufficient accuracy can be defined as follows:
Note that, apart from the size of the extended domain, parameter \(\alpha \) also gives us a rough estimate of the grid step size in the problem, as we require that the interval of the length \(\alpha \) should contain at least one grid point. For instance, if \(L=10\) and \(\alpha =0.1\), then the minimum size of the domain \(\Omega _\mathrm{ext}\) is \(\Omega _\mathrm{ext}=[-10.425, 10.425]\) and the minimum sensible number of grid points should be \(n_{\min }=210\). For \(n<n_{\min }\), the poor approximation will result in P being considerably less than 1 or may lead to \(P>1\) which is senseless.
The analysis similar to that performed above for the normal distribution can be carried out for a different type of the kernel. Consider now the Cauchy-distributed kernel,
where \(\beta \) is a parameter. Again, we require that the condition (34) holds. Let us fix the value of x in (37) and consider it as the Cauchy distribution of the variable y. Integration over the domain \(\Omega =[-L,L]\) gives
In order to meet the requirement \(P=1\), we need to ensure that \(\arctan \left( (L-x)/\beta \right) =\pi /2\) and \(\arctan \left( (L+x)/\beta \right) =\pi /2\).
Let \(v^*\) be a parameter that provides the required accuracy of the integration, such that \(\arctan (v^*) \approx \pi /2\) with the desired precision. We then require
in order to approximate \(P \approx 1\) in the expression (38). That will give us the necessary range of x as
Therefore, the extended domain \(\Omega _\mathrm{ext}\) can be defined as
Clearly, for any chosen accuracy \(v^*\), the size of the domain is fully controlled by the value of the parameter \(\beta \).
We notice here that the asymptotic convergence of the function \(\arctan (v)\) is much slower than the convergence of the function \(\text{ erf }(v)\). Correspondingly, in simulations with the Cauchy kernel, the domain extension has to be considerably larger than in simulations with the normally distributed kernel. By the way of example, several relevant values of \(\arctan (v)\) are given in Table 1. Considering, for instance, the minimum accuracy of 0.2 % (i.e., at most 0.002 of the total population is lost because of its dispersal through the domain boundary), we observe that factor \(v^*\approx 200\). For a hypothetical value \(\beta =0.1\), it leads to the requirement that the margin separating the spreading population from the domain boundary should be about 20 or larger.
The above approach readily applies to the 2D problem as well, with the obvious modification that it should be used in both directions x and y.
1.2 Accumulation of Integration Error with Time
We now investigate how fast the numerical error is accumulated with time when the kernel is defined in either the original domain \(\Omega \) or the extended domain \(\Omega _\mathrm{ext}\). For this purpose, we consider
where, at each generation t, we take into account only dispersal but not reproduction. Consider the case where the dispersal kernel is normally distributed; see (33). Assuming for the sake of simplicity that the initial condition is given by the normal distribution as well, i.e.,
the population density after t generations is given by the following normal distribution:
where the variance is
\(t=1,2,3\ldots \).
Let us now compute the function \(\tilde{N}_t(x)\) by numerical integration in the domain \(\Omega \) and compare it with the exact solution \(N_t(x)\) given by (43). For any fixed t, the error \(e_i=|N_t(x_i)-\tilde{N}_t(x_i)|\) is computed at every point \(i=1,2,\ldots ,K\) of a uniform computational grid where K is the total number of grid nodes. The error norm is then defined as
The graph of the error norm (45) as a function of t is shown in Fig. 12 by the dashed curve. The parameters of this test case are \(\alpha =3.0\), \(\alpha _0=1.0\), \(\mu =0\), \(t=10\) and \(\Omega =[-20,20]\). The number of grid nodes on a uniform computational grid is \(K=2049\). Here and below, the error is shown on the logarithmic scale. It is readily seen that the error increases rapidly as the time progresses. Further refinement of the grid does not result in any significant improvement in accuracy. Hence, we conclude that poor accuracy of numerical integration for \(t>10\) is related to inaccurate kernel computation at the domain boundaries as discussed in the previous section.

Computation of the convolution by numerical integration. The test case parameters are \(\alpha =3.0\), \(\alpha _0=1.0\), \(\mu =0\), \(t=10\) and \(\Omega =[-20,20]\). The graph of the error norm (45) as a function of t. The computation is made in the domain \(\Omega _\mathrm{ext}\) (solid line, open square) and the domain \(\Omega \) (dashed line, closed circle)
We now make use of the findings in the previous section and compute the solution of Eq. (41), which we denote as \(\tilde{N}_t(x)\), by numerical integration in the extended domain \(\Omega _\mathrm{ext}\). The numerical solution \(\tilde{N}_t(x)\) is then compared with the exact solution \(N_t(x)\) in the domain \(\Omega \). We emphasize that the domain \(\Omega _\mathrm{ext}\) should be thought of as an auxiliary domain only used for accurate computation of the kernel. The resulting function \(\tilde{N}_t(x)\) is still considered in the domain \(\Omega \) where we assume the species population exists in the framework of our model.
The error norm for the function \(\tilde{N}(t,x)\) when the computation is performed in the domain \(\Omega _\mathrm{ext}\) is shown in Fig. 12 by the solid curve. The problem parameters remain the same as in the previous test case. According to the analysis done in the previous section, see (36), the size of the extended domain is \(\Omega _\mathrm{ext}=[-32.7279, 32.7279]\). It is therefore clear that computation in the extended domain \(\Omega _\mathrm{ext}\) provides very good accuracy for the solution evaluation in the original domain \(\Omega \).
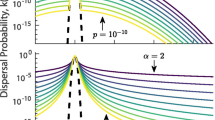
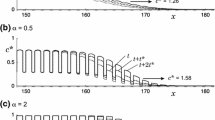
Note that the error only becomes large when the integrand function \(\tilde{N}_{t-1}(x)\) has relatively large values close to the endpoints of the domain. Let us fix the time t and vary the parameter \(\alpha \) in the formula (33). The corresponding graphs of the function \(N_t(x)\) are shown in Fig. 13a. For each value of \(\alpha \), we compute the error norm shown in Fig. 13b, where the results of computation are presented in the domain \(\Omega \) and the domain \(\Omega _\mathrm{ext}\).

Computation of the convolution by numerical integration when the kernel parameter \(\alpha \) is varied. The other parameters are \(\alpha _0=1.0\), \(\mu =0\), \(\Omega =[-20,20]\) and \(t=25\). a The graph of the function N(t, x) given by (43) for \(\alpha =0.05\), \(\alpha =0.5\) and \(\alpha =2.0\). b The graph of the error norm (45) as a function of \(\alpha \). The computation is made in the domain \(\Omega \) (dashed line, closed circle) and the domain \(\Omega _\mathrm{ext}\) (solid line, open square)
We therefore conclude that the accuracy of computation will deteriorate with time, provided that the support of the integrand \(N_{t-1}(x)\) gets bigger as the time progresses. The ‘critical’ time \(t_c\) when the error becomes unacceptably large can be roughly estimated from the condition \(3\alpha _t=L\), where \(\alpha _t\) is given by the Eq. (44). For \(L=20\), \(\alpha _0=1.0\) and \(\alpha =3.0\), we have \(t_c \approx 4\) and this estimate appears to be in a good agreement with the results of Fig. 13a.
1.3 Grid Convergence Test
Now we consider a nonlinear integro-difference equation that takes into account both dispersal and reproduction:
In order to test the quality of our numerical approach, we need a function f that could provide a non-trivial spatiotemporal dynamics such as pattern formation. Correspondingly, we consider
As for the dispersal, we consider the normally distributed kernel given by (33).

Comparison of the solution on a fine grid of 8193 nodes (a bold line) with the solution on a coarse grid of 129 nodes at the fixed time \(t=20\). The domain size is \([-L,L]\), where \(L=15.0\). The other parameters are \(\alpha =0.1\) and \(r=7.0\)
Equation (46) is solved numerically in the domain \([-L,L]\) to obtain the solution \(N_t(x)\) at generation t from the solution \(N_{t-1}(x)\) at the previous generation \(t-1\). We use a regular grid, so that the location of each grid node in the domain is given by \(x_{i+1}=x_i+\Delta \), where the grid step size \(\Delta =2L/K\) and K is the number of grid nodes. For any fixed time t, the accuracy of the solution depends on the total number of nodes in the spatial grid used for numerical integration. The example of numerical solution on a coarse grid of \(K=129\) nodes and a fine grid of \(K=8193\) nodes at the fixed time \(t=20\) is shown in Fig. 14. It is readily seen that the solution accuracy is lost on the coarse grid where the grid step size is not sufficiently small to resolve the solution oscillations.

The error norm as a function of the number K of grid nodes
The above observations can be summarized by computing the solution error on a sequence of spatial grids when the time t is fixed. Namely, we first compute a numerical solution on a very fine grid of \(K_f=8193\) nodes. We consider this numerical solution as this ‘exact’ solution and denote it \(N^\mathrm{exact}(x)\). We then generate a sequence of uniformly refined grids where the ‘exact’ solution obtained on the fine grid should be available on each grid in the sequence. Hence, we consider a projection of fine grid onto a uniform coarse grid of K nodes. The number K is defined as \(K=sK_0+1\), where \(K_0=32\) is the number of grid subintervals on the initial coarse grid and the scaling coefficient is \(s=2^{p}, p=0,1,2,\ldots ,7\). The nodal coordinates \(x_i^{c}\), \(i=1,\ldots ,K\) and \(x_i^{f}\), \(k=1,\ldots ,K_f\), considered on the coarse and fine grid, respectively, are related as \(x_i^{c}=x_k^{f}\), where \(k=si\). Once the grid projection has been made, the ‘exact’ solution is readily available at nodes \(x_i\) of a coarse grid and the solution error
is computed at each node. The error norm is defined accordingly as \(||e||=\max _i e_i\).
The graph of the error norm as a function of the number K of grid nodes is shown in Fig. 15. It is seen from the figure that very good accuracy of computation is approached when the number of grid nodes is \(K \ge 513\), i.e., the grid step size is \(\Delta <0.0586\). Meanwhile, the solution is very poorly resolved on coarse grids with \(K \le 65\) where the maximum error is \( ||e|| \sim 1\).
Appendix 2: Details of the FFT Numerical Technique
Let the function f(x) be defined in the domain \(x \in (-\infty , +\infty )\). The Fourier transform \(\widehat{f}(s)\) of the function f(x) is given by
and the inverse Fourier transform is
Consider now two functions f(x) and g(x) defined for \(x \in (-\infty , +\infty )\). Their convolution denoted \({f *g}\) is defined as
Obviously, the convolution \({f *g}\) is a function of x, \({f *g}\equiv {f *g}(x)\) and we can apply (49) to \({f *g}(x)\) to obtain the Fourier transform \(\widehat{f *g}(s)\) of the convolution.
Let \(\widehat{f}(s)\) be the Fourier transform of a function f(x) and \(\widehat{g}(s)\) be the Fourier transform of a function g(x). The convolution theorem states that
i.e., the Fourier transform of the convolution of two functions is equal to the product of their Fourier transforms (e.g., see Champeney 1973). Thus, the convolution \({f *g}(x)\) of two functions can be found by calculating and inverting the Fourier transform \(\widehat{f *g}(s)\) rather than by performing straightforward integration in (50).
It is important to note that the convolution theorem (51) can be applied in the multi-dimensional case where \(f(\mathbf {x})\) and \(g(\mathbf {x})\) are functions of the vector argument \(\mathbf {x}\). The following discussion refers to the one-dimensional case as all basic results can be readily extended to a two-dimensional problem.
The functions f and g in the theorem (51) are generally supposed to be complex functions. Clearly, real functions in the generic population dynamics model (2) present a particular case of complex functions and the theorem (51) can therefore be employed in our problem to compute
where \({f *k}\) is required to obtain population distributions and the definition of the kernel k(x) is given in the text. The interval L has to be chosen large enough so that in the time considered in the simulation, there is no boundary effects on the solution and we can assume that \(y \in [-L,L]\) is a good approximation of the infinite interval (see also the discussion in Appendix 1).
The convolution theorem gives us the theoretical background for finding the values of a continuous function \({f *k}\) in the formula (52). However, when the problem (2) is solved numerically, see Sect. 3.3, both the population density and the kernel are only defined at nodes of a computational grid. Thus, the continuous Fourier transform has to be replaced with the discrete Fourier transform (DFT).
Let a continuous function f(x) be discretized over the interval \(x \in [0,1]\) so that only the values \(f_k \equiv f(x_k)\) are considered, where \(x_k=k\Delta x\), \(k=0,\ldots K-1\), \(\Delta x=1/(K-1)\) is the grid step size and K is the number of grid nodes chosen in the problem. We denote \([f_k]\) the discrete function given by the set of numbers \(f_0,f_1,\ldots ,f_{K-1}\). The DFT of the function \([f_k]\) denoted \(F_s\) is defined as
The corresponding inverse transform is
The discrete Fourier transform can be loosely thought of as approximation of the integral (49) by the finite sum (53).
One important consequence of the definition (53) is that the convolution theorem is still valid in the discrete case stating that the product of the two individual DFTs will give the DFT of the discrete convolution (e.g., see Nussbaumer 1982). Thus, the task of computing the convolution (52) can be decomposed as computing \(\widehat{k}\) and \(\widehat{f}\) to produce \(\widehat{k *f}=\widehat{k} \widehat{f}\) and then computing the inverse DFT of the product.
Computing and inverting the DFT can be done efficiently with help of the fast Fourier transform (FFT) numerical algorithms. The key idea behind any FFT computational routine is to reduce the number of operations required to compute the DFT and its inverse transform.
While the number of operations in a straightforward DFT computation using the formula (53) is \(O(K^2)\), an FFT algorithm reduces that number to \(O(K\log _2(K))\). It is worth noting here that the FFT is also superior to methods of numerical integration. For instance, numerical integration of (52) by a composite trapezoidal rule can be done in \(O(K^2)\) operations.
The significant reduction in the number of operations requires a sophisticated algorithm incorporating a number of computational tricks, e.g., choosing the number K to be \(K=2^m\) for some integer m and interchanging the first and second parts of the output vector in a computer program. The detailed explanation of the FFT algorithm can be found elsewhere (e.g., Press et al. 2007). In our problem, there also are some small modifications to the standard FFT routine dictated by the problem statement: We have to multiply the result by 2L (as the standard FFT algorithm assumes that the functions are defined on the interval [0, 1]) and remove the imaginary vector components created during the calculations as we deal with real functions only.
In the two-dimensional case, the FFT can be split into a series of one-dimensional FFTs resulting in the total number of operations \(O(K^2\log _2(K))\). We use internal Mathematica routines to calculate the two-dimensional Fourier transform by FFT and, hence, obtain the population distributions over the lattice.
The results of the FFT computation performed for several test cases have been verified by direct numerical integration of (52), and very good agreement between the results of the two methods (i.e., the FFT and the trapezoidal rule of integration) was demonstrated in all test cases.
Rights and permissions
About this article

Cite this article
Rodrigues, L.A.D., Mistro, D.C., Cara, E.R. et al. Patchy Invasion of Stage-Structured Alien Species with Short-Distance and Long-Distance Dispersal. Bull Math Biol 77, 1583–1619 (2015). https://doi.org/10.1007/s11538-015-0097-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11538-015-0097-1