
Abstract
The role of Power System Stabilizer (PSS) in the power system is to provide necessary damping torque to the system in order to suppress the oscillations caused by a variety of disturbances that occur frequently and maintain the stability of the system. In this paper, a PSS design technique is proposed using Whale Optimization Algorithm (WOA) by considering eigenvalue objective function. Two bench mark multi machine test systems: three- generator nine- bus system, two- area four- generator inter connected system working on various operating conditions are considered as case studies and tested with the proposed technique. Extensive simulation results are obtained and effectiveness of proposed WOA-PSS are compared with well - known PSO and DE based stabilizers under several disturbances.
Similar content being viewed by others


1 Introduction
Operation and control of the power system under various operating conditions and configurations is always a challenging, difficult task to the power system engineers as it suffers from a variety of disturbances. During the disturbances, generators in the interconnected power system will oscillate and causes loss of synchronism. Oscillations in the range of low frequencies have considerable effect on the system dynamic stability. To counter these disturbances, PSS is developed as an auxiliary controller to damp out these oscillations by providing sufficient damping torque to the system [1, 2]. PSS tuning procedure guidelines using various signals are mentioned in [3, 4]. Later Kundur [5] had developed a systematic methodology for PSS tuning and implemented on Ontario Hydro station. Coordinated fixed gain PSS tuning on a wide range of operating conditions is given in [6]. In line with these methods, various PSS design techniques are developed from the last few decades, which includes robust control techniques [7, 8], sliding mode control techniques [9,10,11] optimization methods [12,13,14], H∞ techniques [15, 16], artificial intelligence techniques based PSS is given in [17,18,19]. Some of the disadvantages of the above mentioned techniques are that they need number of particles and hence much time for the design of PSS for multi machine interconnected systems, operating on various conditions and configurations. In recent years, heuristic algorithms have been developed by various researchers to solve complex problems in the field of science and technology. These include Simulated annealing [20], tabu search [21], genetic algorithm [22, 23], particle swarm optimization [24, 25], differential evolution [26], artificial bee colony [27, 28], honey –bee algorithm [29], harmony search algorithm [30, 31], cuckoo algorithm [32], chaotic – teaching, learning methods [33], gray wolf algorithm [34], bat algorithm [35, 36], back tacking algorithm [37] were developed for the PSS design from the last few years. Though several methods are developed, optimal PSS design for a highly nonlinear interconnected power system under variable operating conditions is still essential for robust operation. PSS design technique using WOA is proposed in this paper, and is tested on various test systems under a variety of disturbances to get the robust damping performance of the system. WOA [38] was developed by Seyedali. Mirjalili by observing the foraging method of Humpback whales. These whales have very special hunting method named as bubble- net feeding method, in which whale creates two paths for reaching the prey. Based on this unique hunting method of the whales, WOA is developed. PSS design using WOA is developed based on the locations of the lightly damped electromechanical modes of the system to enhance the damping performance of the system. The proposed method is tested on three multi-machine inter connected systems: three- generator nine- bus system, two- area four-generator system and ten- generator thirty-nine bus system working on various operating conditions under several disturbances. The efficacy of proposed WOA based PSS is compared with the famous optimization algorithm based PSSs such as PSO based and DE based PSS. The proposed design technique would become better substitute to the conventional stabilizers, as they need lots of calculations for the design purpose, when the power system operates on variable operating conditions.
2 Problem statement
The complex, interconnected power system can be represented by n machines. Each generator in the power system can be represented by Heffron-Philips model. The problem in this paper is to design parameters of PSS of the inter connected multi-machine power system. Here two multi-machine interconnected power systems are considered. For any nth machine, the equations that govern the dynamics of the interconnected power system are as follows.
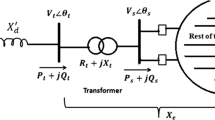
where δ, ωm are the rotor angle and angular speed, Sm is slip speed, H is inertia constant, Tmech is mechanical torque, Telec is electrical torque, D is damping coefficient, Eq’ is field flux emf in transient state, Td0 is open circuit time constant of d-axis, Xd’ is d-axis transient reactance and Xq’ is q-axis transient reactance, Efd is field voltage, Ke is gain of the exciter, Vref is the reference voltage, Vpss is PSS input, Vt is terminal voltage id and iq are the d and q-axis are respectively.
2.1 Structure of PSS
The main role of PSS is to provide damping torque to the excitation system of the generator in order to damp out electromechanical oscillations in the range of low frequencies which arose from small disturbances. This can be done by three major components of the PSS. The first component is the gain component that provides sufficient gain value to the system in order to damp out the oscillations, second component is the washout component, which acts as a high pass filter and the third one is a phase compensation component, which improves the phase lag through the system. The transfer function of PSS can be represented as
Where Kpssi is PSS gain, Twi is the time constant of washout component, T1, T2, T3,T4 are the time constants of the phase compensation component, and Δωi is the speed deviation. When these parameters are evaluated properly, PSS can work effectively and enhance the dynamic performance of the system during the disturbances. Hence PSS parameters are assumed as control parameters and are evolved on a given objective function using proposed algorithm.
3 Proposed whale optimization algorithm for PSS design
WOA is proposed by Seyedali Mirjalili, in the year 2016 by impersonating the behavior of humpback whales. Humpback whales have very special hunting method, which is named as bubble – net feeding method. Based on this foraging method this algorithm was developed. Figure 1 shows Bubble – net feeding method of humpback whales. The motivation behind using WOA method is to design PSS parameters is, WOA has very good properties as follows; due to the less number of control parameters (two), WOA takes minimum time for evolution process, when compared to DE and PSO. For any optimization algorithm, exploitation (integration) and exploration (diversification) are very important stages and a good balance between these two stages will enhance the performance of search problem to get optimum solution. In WOA, the transit between exploitation and exploration operation can be done in a smoother manner and it can be done with only one parameter. More ever, the literature says that there is always a room for the improvement of the current techniques to get better solutions [39]. This motivation has lead to use WOA for the design of PSS to the interconnected multi- machine power system.

Bubble - net feeding method of humpback whale
WOA method in this paper is used to optimize the PSS parameters of all the generators of test systems operating on a wide range of operating conditions and system configurations on a given objective function. Several typical disturbances have been considered at various locations of the test systems to test the robustness of WOA-PSS. The performance of WOA-PSS is compared with DE-PSS and PSO-PSS to prove its superiority in suppressing the oscillations.
WOA is developed to evolve the PSS parameters of various test systems. The following are the various steps involved in implementing WOA for PSS design.
Step1: Initialization
To start with, population size of the algorithm is chosen as 40, total number of generations is taken as 100 and the range of control variables are selected and listed in Table 1. PSS parameters are realized as control variables. The initial populations are randomly generated by using the given expression.
Where X is the control variable and \( {X}_j^{\mathrm{min}} \), \( {X}_j^{\mathrm{max}} \) are the lowest and highest value of the control variables. j = 1, 2… N, N is the number of control variables, i = 1, 2, 3………. Np, Np is population size, rand∈ [0, 1] is a number varies between 0 and 1 randomly.
Step 2: Evaluating objective function
Eigenvalues of test systems are determined to find the objective function. To shift the eigenvalues of the test system into desired locations of the s-plane, here an objective function is formulated. Only lightly damped eigenvalues are considered to construct the objective function as these are responsible for the oscillatory behavior of the system. Hence, only these poles are considered throughout the study and shifted into desired locations by minimizing the following objective function.
Here Np is population size considered, σi is real part of ith eigenvalue of the population and σ0 is relative stability and is chosen as − 0.3, ζi damping ratio of the ith eigenvalue of the population . Here ζ0value is taken as 0.15. Eigen values will place in the highlighted regions of Fig. 2a, if J1alone is considered. Eigenvalues will move in the marked regions of Fig. 2b, if J2alone is considered. Two single objective functions J1 and J2can be combined together by assigning them a weighing factor, C to get the single objective function, J to place the eigen valuses into the desired locations. All the considered roots will move in the desired locations with the single objective function as shown in Fig. 2c. The value of C chosen as 10. For each particle, the fitness function is calculated by using eq. 8 and the best fitness function is identified among them.

Regions of closed loop eigenvalues for multi objective function
Step 3 Search agent updation using Shrinking encircle mechanism (exploration phase)
Here the WOA is used to identify the best solution obtained so far. After fitness function is calculated on a random basis, since optimum position is not known initially, in the search place, the present best solution is considered as target prey or close to the optimum. Then other search agents will update their position after the best search agent is identified according to the following equation
Here t represents present iteration, \( \overrightarrow{A} \), \( \overrightarrow{C} \) are the coefficient vectors, X∗is the best solution obtained so far, \( \overrightarrow{X} \)is the position vector ║ is the absolute value, and ‘.’represents a multiplication of elements to the elements. The vectors\( \overrightarrow{A},\overrightarrow{C} \) are represented as
Here value of \( \overrightarrow{A} \)varies between -a, a randomly. Where a varies from 2 to 0 during the course of iterations. For each search agent a, A, C values are updated. If value of \( \overrightarrow{A} \) is less than 1, then the the search agent updates its position by Eq. 11.
Step 4 Particle updation using a spiral mechanism
As humpback whales swim around the prey within a shrinking circle and spiral – shaped path, a spiral equation is created between whale’s position and the prey to mimic the helix – shaped movement of the humpback whales. All the search agents follow the equation below.
Where
Where l is a random number varies between 0 and 1. To combine both shrinking circle path and spiral path, here 50% probability is given for the paths to update the positions of the whales. Finally search agent follows the equation below.
Step 5 Search for prey (exploitation phase)
If the value of \( \overrightarrow{A} \) is greater than 1, to have an exploitation phase position of the search agent is updated according to randomly chosen search agent instead of best search agent. The search agent follows the equation below.
Where \( \overrightarrow{X_{j_i}}\mathit{\operatorname{rand}} \) is the random position vector selected from the current population. The flow chart for implmentation of proposed algorithm is shown in Fig. 3.

Flow chart for WOA
4 Case studies
4.1 Case 1 three generator nine bus system
The operating conditions in per unit values of this case are listed in Table 2. Figure 4 shows the block diagram of Heffron-Philips model for multi machine systems [40]. A modified Heffron-Philphs model [41] is considered in the development of multi-machine system. The advantage of this model is PSS design can be done with the information available with the generating station. With this model PSS tuning could be done in a decentralized manner. Figure 5 shows the three generator nine bus test system [42].

Heffron - Philips model for multi-machine system

Three generator nine bus test system
4.2 Case 2 two- area four machine system
This test system has been taken from [43] which is a very popular test system for the study of power system stability. Two generators serves each area of the of this test system and each area is connected by two 220 km, 230 KV transmission lines. Figure 6 depicts two- area four- generator interconnected system. Power system stabilizer is connected at each generator and a sustained three phase fault is created at the midpoint of the line to test the performance of the proposed technique.

Two area system
5 Simulation results and discussions
5.1 Case 1
Initially design approach is made by taking this case for evaluating PSS parameters. Whale algorithm is run several times to optimize the PSS parameters. Evolved parameters are listed in Table 3. Efficacy of WOA -PSS is then tested with a disturbance of 10% step change at Vref at each generator.
The performance curves are depicted in Figs. 7, 8, 9, 10, 11 and 12. These figures show the speed deviation plots for disturbances of 10% step change at Vref and 10% step change at turbine input. The Figures show that intensity of the oscillations is greatly reduced and duration of this intensity is much lesser with WOA-PSS when the proposed stabilizer is established in the system. From these observations it is concluded that the WOA-PSS shows superior performance in minimizing the oscillations when compared to DE, and PSO based stabilizers.

Speed deviation of G1 for 10% step change at Vref

Speed deviation of G2 for 10% step change at Vref

Speed deviation of G3 for 10% step change at Vref

Speed deviation of G1 for 10% step change at turbine input

Speed deviation of G2 for 10% step change at turbine input

Speed deviation of G3 for 10% step change at turbine input
To prove the robustness of WOA -PSS, eigenvalue analysis is made on the system and is compared with DE-PSS and PSO-PSS.
Table 4 shows the eigenvalue comparison of the test case with proposed WOA-PSS and DE-PSS and PSO-PSS. It is observed that the real part of considered eigenvalues of all the generators are increased, i.e., eigenvalues are shifted into moves away to desired locations from the previous locations with WOA-PSS. Hence it is proved that WOA- PSS is very effective in placing the lightly damped oscillating modes of the system into the desired regions.
5.2 Case 2
This test case is a very popular one in the field of stability and control. Total four generators are interconnected with each generator is equipped with one power system stabilizer. PSS parameters are optimized with the proposed method over a given objective function and listed in Table 5. Table 5 depicts the evolved parameters of PSS with WOA, DE and PSO. PSS are embedded with these parameters and tested on a severe sustained three phase fault.
Performance plots of four generators with WOA, DE and PSO based power system stabilizers are shown in Figs. 13, 14, 15, 16, 17, 18 and 19 under severe sustained three phase fault at t = 10 s condition. It can be seen from the simulation results that the oscillations at generator one, generator two, generator three and generator four of two area systems are reduced and settled in a lesser time when the PSSs are designed with WOA than the other stabilizers. It is to be noted that the peak overshoot is greatly reduced with the proposed stabilizer than the other stabilizers for all the generators. This shows the efficacy of the proposed stabilizer over the other stabilizers.

Speed deviatio n of G1 under 3-φ fault at t = 10 s

speed deviation of G2 under 3-φ fault at t = 10 s

speed deviation of G3 under 3-φ fault at t = 10 s

speed deviation of G4 under 3-φ fault at t = 10 s

delta deviation of G1 under 3-φ fault at t = 10 s

delta deviation of G2 under 3-φ fault at t = 10 s

delta deviation of G3 under 3-φ fault at t = 10 s
Further, to have more emphasis, eigenvalue analysis is made for all the generators and shown in Table 6. Table 6 depicts eigenvalue analysis of the two area system. It is observed from the results that low damped oscillating electromechanical modes are shifted more away from the imaginary axis with the WOA based stabilizer than the other stabilizers.
Time specifications are also found to test the dynamic performance of WOA-PSS and shown in Table 7. It is clear from these results that overshoot and the settling time are reduced with WOA-PSS in all the generators. At G1 with WOA-PSS, settling time is 1.6879 s, which is lesser than other stabilizers. Further, settling time is decreased from 2.8499 s to 1.5374 s with WOA-PSS at G2. Oscillations are settled very quickly with lesser over shoot with proposed stabilizers than the other stabilizers at G3. The same observation is made at G4 also. Hence WOA–PSSs greatly enhances the damping characteristics of the system. Figure 20 Shows the convergence characteristics comparison of WOA with DE and PSO.

convergence characteristics WOA,DE and PSO
6 Conclusion
A PSS design technique using whale optimization algorithm for the interconnected power system working on various operating conditions is proposed in this paper. The design technique has been successfully implemented on two case studies: three generator nine bus system and two area systems working at various operating conditions under typical disturbances. It is concluded from simulation results that the proposed WOA based stabilizer exhibited better damping performance than the DE and PSO based Stabilizers From the eigenvalue analysis, it is proved that weakly damped eigenvalues placed into desired locations with whale based PSS, when compared to other stabilizers in all the cases.
References
Schleif, F., Hunkins, H., Martin, G., & Hattan, E. (1968). Excitation control to improve powerline stability. IEEE Trans Power Appar Syst, PAS-87(6), 1426–1434.
Demello, F., & Concordia, C. (1969). Concepts of synchronous machine stability as affected by excitation control. IEEE Trans Power Appar Syst, PAS-88(4), 316–329.
Larsen, E. V., & Swann, D. A. (1981). Applying Power system stabilizers part III: Practical considerations. IEEE Trans Power Appar Syst, PAS-100(6), 3034–3046.
Larsen, E., & Swann, D. (1981). Applying Power system stabilizers part I: General concepts. IEEE Trans Power Appar Syst, PAS-100(6), 3017–3024.
Kundur, P., Klein, M., Rogers, G. J., & Zywno, M. S. (May 1989). Application of power system stabilizers for enhancement of overall system stability. IEEE Trans Power Syst, 4(2), 614–626.
Gibbard, M. J. (1988). Co-ordinated design of multimachine power system stabilisers based on damping torque concepts. IEE Proc C Gener Transm Distrib, 135(4), 276.
Gupta, R., Bandyopadhyay, B., & Kulkarni, A. M. (2003). Design of power system stabilizer for single machine system using robust fast output sampling feedback technique. Electr Power Syst Res, 65(3), 247–257.
Khodabakhshian, A., & Hemmati, R. (2012). Robust decentralized multi-machine power system stabilizer design using quantitative feedback theory. Int J Electr Power Energy Syst, 41(1), 112–119.
Nechadi, E., Harmas, M. N., Hamzaoui, A., & Essounbouli, N. (2012). A new robust adaptive fuzzy sliding mode power system stabilizer. Int J Electr Power Energy Syst, 42(1), 1–7.
Ray, P. K., Paital, S. R., Mohanty, A., Eddy, F. Y. S., & Gooi, H. B. (2018). A robust power system stabilizer for enhancement of stability in power system using adaptive fuzzy sliding mode control. Appl Soft Comput, 73, 471–481.
Dash, P. K., Patnaik, R. K., & Mishra, S. P. (2018). Adaptive fractional integral terminal sliding mode power control of UPFC in DFIG wind farm penetrated multi-machine power system. Prot Control Mod Power Syst, 3(1), 8.
Aldeen, M. (1995). Multimachine power system stabiliser design based on new LQR approach. IEE Proc - Gener Transm Distrib, 142(5), 494.
Ko, H. S., Lee, K. Y., & Kim, H. C. (2004). An intelligent based LQR controller design to power system stabilization. Electr Power Syst Res, 71(1), 1–9.
Xie, Y., Zhang, H., Li, C., & Sun, H. (2017). Development approach of a programmable and open software package for power system frequency response calculation. Prot Control Mod Power Syst, 2(1), 18.
Yang, T. (1997). Applying H∞ optimisation method to power system stabiliser design part 1: Single-machine infinite-bus systems. Int J Electr Power Energy Syst, 19(1), 29–35.
Hardiansyah, S. F., & Irisawa, J. (2006). A robust H∞ power system stabilizer design using reduced-order models. Int J Electr Power Energy Syst, 28(1), 21–28.
Tavakoli, A. R., Seifi, A. R., & Arefi, M. M. (2018). Fuzzy-PSS and fuzzy neural network non-linear PI controller-based SSSC for damping inter-area oscillations. Trans Inst Meas Control, 40(3), 733–745.
Shokouhandeh, H., & Jazaeri, M. (2018). An enhanced and auto-tuned power system stabilizer based on optimized interval type-2 fuzzy PID scheme. Int Trans Electr Energy Syst, 28(1), e2469.
Li, X.-M., Fu, J.-F., Zhang, X.-Y., Cao, H., Lin, Z.-W., & Niu, Y.-G. (2018). A neural power system stabilizer of DFIGs for power system stability support. Int. Trans. Electr. Energy Syst., 28(6), e2547.
Abido, M. A. (2000). Robust design of multimachine power system stabilizers using simulated annealing. IEEE Trans Energy Convers, 15(3), 297–304.
Abido, M. A. (1999). A novel approach to conventional power system stabilizer design using tabu search. Int J Electr Power Energy Syst, 21(6), 443–454.
Do Bomfim, A. L. B., Taranto, G. N., & Falcao, D. M. (2000). Simultaneous tuning of power system damping controllers using genetic algorithms. IEEE Trans Power Syst, 15(1), 163–169.
Sebaa, K., & Boudour, M. (2009). Optimal locations and tuning of robust power system stabilizer using genetic algorithms. Electr Power Syst Res, 79(2), 406–416.
Kuttomparambil Abdulkhader, H., Jacob, J., & Mathew, A. T. (2018). Fractional-order lead-lag compensator-based multi-band power system stabiliser design using a hybrid dynamic GA-PSO algorithm. IET Gener Transm Distrib, 12(13), 3248–3260.
Wang, D., Ma, N., Wei, M., & Liu, Y. (2018). Parameters tuning of power system stabilizer PSS4B using hybrid particle swarm optimization algorithm. Int Trans Electr Energy Syst, 28(9), e2598.
Wang, K. (2016). Coordinated parameter design of power system stabilizers and static synchronous compensator using gradual hybrid differential evaluation. Int J Electr Power Energy Syst, 81, 165–174.
Shrivastava, A., Dubey, M., & Kumar, Y. (2013). Design of interactive artificial bee Colony based multiband power system stabilizers in multimachine power system. In 2013 international conference on control, automation, robotics and embedded systems (CARE) (pp. 1–6).
Abd-Elazim, S. M., & Ali, E. S. (2015). A hybrid particle swarm optimization and bacterial foraging for power system stability enhancement. Complexity, 21(2), 245–255.
Mohammadi, M., & Ghadimi, N. (2015). Optimal location and optimized parameters for robust power system stabilizer using honeybee mating optimization. Complexity, 21(1), 242–258.
Sambariya, D. K., & Prasad, R. (2015). Optimal tuning of fuzzy logic Power system stabilizer using harmony search algorithm. Int J Fuzzy Syst, 17(3), 457–470.
Naresh, G., Ramalinga Raju, M., & Narasimham, S. V. L. (2016). Coordinated design of power system stabilizers and TCSC employing improved harmony search algorithm. Swarm Evol Comput, 27, 169–179.
Abd Elazim, S. M., & Ali, E. S. (2016). Optimal Power system stabilizers design via cuckoo search algorithm. Int J Electr Power Energy Syst, 75, 99–107.
Farah, A., Guesmi, T., Hadj Abdallah, H., & Ouali, A. (2016). A novel chaotic teaching–learning-based optimization algorithm for multi-machine power system stabilizers design problem. Int J Electr Power Energy Syst, 77, 197–209.
Shakarami, M. R., & Faraji Davoudkhani, I. (Apr. 2016). Wide-area power system stabilizer design based on Grey wolf optimization algorithm considering the time delay. Electr Power Syst Res, 133, 149–159.
Sambariya, D. K., Gupta, R., & Prasad, R. (2016). Design of optimal input–output scaling factors based fuzzy PSS using bat algorithm. Eng Sci Technol an Int J, 19(2), 991–1002.
Chaib, L., Choucha, A., & Arif, S. (2017). Optimal design and tuning of novel fractional order PID power system stabilizer using a new metaheuristic bat algorithm. Ain Shams Eng J, 8(2), 113–125.
Islam, N. N., Hannan, M. A., Shareef, H., & Mohamed, A. (2017). An application of backtracking search algorithm in designing power system stabilizers for large multi-machine system. Neurocomputing, 237, 175–184.
Mirjalili, S., & Lewis, A. (2016). The whale optimization algorithm. Adv Eng Softw, 95, 51–67.
Mafarja, M. M., & Mirjalili, S. (2017). Hybrid whale optimization algorithm with simulated annealing for feature selection. Neurocomputing, 260, 302–312.
Yao-nan, Y. (1983). Electric Power System Dynamics. Academic Press, ISBN 0127748202, 9780127748207.
Gurrala, G., & Sen, I. (2008). A Modified Heffron-Phillip’s Model for The Design of Power System Stabilizers. In Joint International Conference on Power System.
Anderson, P. M., & Fouad, A. A. (1977). Power system control and stability. Wilely India, Reprint: Unique color carton, New Delhi. ISBN:978-81-265-1818-0.
Kundur Power, P. (1994). Systems stability and control. USA: McGraw-Hill.
Acknowledgements
Not applicable.
Funding
This work is carried out without the support of any funding agency.
Availability of data and materials
Please contact author for data and material request.
Declaration
We, hereby declare that this submission is entirely our own work, in our own words, and that all sources used in researching it are fully acknowledged and all quotations properly identified.
Author information
Authors and Affiliations
Contributions
BD designed the study and formulated the objective function. BD and MS performed the simulations on tets systems. MS and RS as supervisors helped in pursing the work with constructive suggensions and edited the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Authors’ information
B. Dasu: The author completed his M. Tech from JNTU Kakinada and pursuing his PhD in JNTU Kakinada. His research interests include Control application to Power Systems and Evolutionary Algorithms.
Mangipudi Siva Kumar: The author completed his M.E and PhD from Andhra University. He is presently working as Professor in EEE Department, Gudlavalleru Engineering College, Gudlavalleru. He has contributed more than 40 technical papers in various referred journals and conference. He is a life member of ISTE, member of IEEE and IAEng and Fellow of Institution of Engineers. His research interests include model order reduction, interval system analysis, design of PI/PID controllers for Interval systems, sliding mode control and Soft computing Techniques.
R.Srinivasa Rao: The author completed his M.E from IISC Bangalore and PhD from JNTU Hyderabad. He is currently working as professor in EEE Department of JNTU Kakinada. His research interests include Optimization Algorithms, State estimation, Modeling and control of Induction Generators. He has published papers in IEEE transactions, Elsevier Publications.
Ethics approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
The authors declare that they have no competing interests.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Dasu, B., Sivakumar, M. & Srinivasarao, R. Interconnected multi-machine power system stabilizer design using whale optimization algorithm. Prot Control Mod Power Syst 4, 2 (2019). https://doi.org/10.1186/s41601-019-0116-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s41601-019-0116-6