
Abstract
In this manuscript, we utilize the algorithm of \((G'/G)\) expansion method to construct new solutions of three important models, the Ablowitz–Kaup–Newell–Segur water wave equation, the \((2 + 1)\)-dimensional Boussinesq equation, and the \((3+1)\)-dimensional Yu–Toda–Sasa–Fukuyama equation, having numerous application in plasma physics, fluid dynamics, and optical fibers. Some new types of traveling wave solutions are acquired, which have not been obtained previously by using this our new technique. The achieved solutions appear with all necessary constraint conditions, which are compulsory for them to exist. The constructed new solutions have vital applications in applied sciences. To understand the physical phenomena of these models, we have also presented graphically movements of the obtained results. It is shown that the our technique provides a more powerful mathematical tool for constructing exact traveling wave solutions for many other nonlinear waves models in mathematics and physics.
Similar content being viewed by others

1 Introduction
In various branches of mathematical and physical sciences, nonlinear evolution equations have been the subject of concentrated study to understand the physical phenomena of nonlinear sciences. Among the possible solutions to NLEEs, certain particular form solutions may depend only on a single combination of the variables such as soliton solutions. A soliton is defined as a self-reinforcing solitary wave in the form of a wave packet or a pulse that always maintains its shape while it travels at steady speed. Solitons occur as the solutions of an extensive class of weakly nonlinear dispersive partial differential equations for describing physical structures. The soliton solutions are usually obtained by means of the inverse scattering transform [1] and their constancy to the integrability of the field equations. Analytical solutions of nonlinear PDEs play a significant rule to perfect understanding qualitative features and physical interpretation of numerous phenomena. Analytical solutions of nonlinear PDEs symbolically and graphically demonstrate unraveling the mechanisms of many nonlinear complex phenomena such as absence or multiplicity of steady states under different necessary conditions, the existence of peaking regimes, a spatial localization of transfer processes, and many others.
Several methods have been constructed for finding exact traveling wave solutions of nonlinear PDEs in the form of soliton, solitary wave, and elliptic function solutions such as Hirota’s bilinear method [2], Jacobi elliptic function method [3], semiinverse variational principle [4], Darboux transformation [5, 6], expansion method [7, 8], extended direct algebraic method [9, 10], auxiliary method [11], sine–cosine method [12], the Kudryashov method [13], and extended simple equation method [14]. The study of solutions, structures, interaction, and further properties of solitons and solitary wave solutions gained much consideration [15–43].
In this work, we have employed novel \((\frac{G'}{G})\) expansion method on the three important models for constructing exact and solitary wave solutions of the nonlinear Ablowitz–Kaup–Newell–Segur water wave equation, which is used as a reduction for some nonlinear evolution equations, \((2 + 1)\)-dimensional Boussinesq dynamical wave equation, which explains the gravity of wave propagation on the surface of the water and also describes the collision of oblique waves transformation movement in different aspects, and \((3+1)\)-dimensional Yu–Toda–Sasa–Fukuyama wave equation, which is used for investigation of the dynamics of solutions and nonlinear waves in fluid dynamics, plasma physics, weakly dispersive media, and many others. Our new constructed solutions are helpful in exploring nonlinear wave phenomena in physical problems, and the results involve long and classified computations.
The paper is organized as follows. The chief steps of the description method are specified in Sect. 2. In Sect. 3, we apply the present method to our three selective models for constructing exact and solitary wave solutions. Discussions of the results are given in Sect. 4. Lastly, a summary of the work is given in Sect. 5.
2 Description of the method
We consider a nonlinear partial differential equation of the form
where R is a polynomial function of \(u(x,y,t)\) and its partial derivatives, in which the highest order derivatives and nonlinear terms are involved. The main steps of our method are as follows.
Step 1. The traveling wave transformations can be deduced as
Utilizing this transformation in Eq. (1), we have the ODE of the form
where S is a polynomial of \(U(\zeta )\) and its derivatives with respect to ζ.
Step 2. Let us assume that the solution of Eq. (3) has the form
where \(A_{i}\) (\(i = 0,1,2,\ldots,m\)) are arbitrary constants to be determined latter, and m is a positive integer, which can be calculated by applying the homogeneous balance principle to Eq. (3).
Let \(G( \zeta )\) satisfy the second-order LODE
where \(\lambda_{1}\) and \(\lambda_{2}\) are arbitrary constants.
Step 3. Substituting Eq. (4) along with Eq. (5) into Eq. (3) and collecting the coefficients at \(( \frac{G'}{G} ) ^{i}\) and then equating the coefficients to zero, we acquire a system of algebraic equations, which can be solved by Mathematica, and consider the following solution cases:
Case 1. When \(\lambda_{1}^{2}-4\lambda_{2}>0\),
Case 2. When \(\lambda_{1}^{2}-4\lambda_{2}<0\),
Case 3. When \(\lambda_{1}^{2}-4\lambda_{2}=0\),
Step 4. Substituting all solutions of Eq. (5) into Eq. (3), we obtain the required solutions of Eq. (1).
3 Applications of description method
3.1 Fourth-order nonlinear Ablowitz–Kaup–Newell–Segur water equation
In this section, we apply our method to the well-known AKNS equation [44] of the general form
This equation includes some nonlinear evolution equations such as sine-Gordon, nonlinear Schrödinger, KdV, and other equations having numerous application in physical science.
The traveling wave transformations can be reduced to the form
where ω is an arbitrary constant to be determined latter. Applying this transformation to Eq. (10) and integrating, we arrive at the ordinary differential equation
Applying the homogeneous balance principle between \(U^{\prime 2}\) and \(U^{\prime\prime\prime} \) in Eq. (11), we get \(m=1\). We assume that solution of Eq. (11) is of the form
Substituting Eq. (12) along with Eq. (5) into Eq. (11), we get algebraic equations in parameters \(A_{0}\), \(A _{1}\), and ω. This system of equations can be solved with the help of Mathematica:
Substituting Eq. (13) into Eq. (12), we obtain the exact traveling solution
Now we discuss three different cases regarding the solution (14).
Case 1. When \(\lambda_{1}^{2}-4\lambda_{2}>0\), substituting Eq. (6) into Eq. (14), we get the following solution of Eq. (9):
Case 2. When \(\lambda_{1}^{2}-4\lambda_{2}<0\), substituting Eq. (7) into Eq. (14), we get the following solution of Eq. (9):
Case 3. When \(\lambda_{1}^{2}-4\lambda_{2}=0\), substituting Eq. (9) into Eq. (14), we get the following solution of Eq. (9):
3.2 \((2+1)\)-D Boussinesq dynamical equation
The general form of the \((2+1)\)-dimensional Boussinesq dynamical equation [45] is the following;
The extreme merit of this equation is that it is used to describe the gravity waves propagation on the water surface and also clarifies the collision of oblique wave transformation.
The traveling wave transformations for Eq. (18) can be deduced as
Using these transformations to Eq. (18), we obtain the ordinary differential equation
Here, applying the homogeneous balance principle to Eq. (20), we get \(m=2\). We suppose that the solution of Eq. (20) is of the form
Substituting Eq. (21) along with Eq. (5) into Eq. (20), we obtain numerous algebraic equations in parameters \(A_{0}\), \(A_{1}\), \(A _{2}\), and k. These equations can be solved with the help of Mathematica:
Substituting Eq. (22) into Eq. (21), we obtain the exact traveling solution
Now we discuss three different cases regarding solution (23).
Case 1. When \(\lambda_{1}^{2}-4\lambda_{2}>0\), substituting Eq. (6) into Eq. (23), we obtain the following solution of Eq. (18):
Case 2. When \(\lambda_{1}^{2}-4\lambda_{2}<0\), substituting Eq. (7) into Eq. (23), we obtain the following solution of Eq. (18):
Case 3. When \(\lambda_{1}^{2}-4\lambda_{2}=0\), substituting Eq. (8) into Eq. (23), we obtain the following solution of Eq. (18):
3.3 \((3+1)\)-Dimensional Yu–Toda–Sasa–Fukuyama equation
The general form of the \((3+1)\)-dimensional Yu–Toda–Sasa–Fukuyama equation [46] is
The advantage of this equation is that it is used for investigation of the dynamics of solutions and nonlinear waves in fluid dynamics, plasma physics, and weakly dispersive media.
The traveling wave transformations for the Yu–Toda–Sasa–Fukuyama equation can be deduced as
Using these transformations in Eq. (27) and integrating, we obtain the ordinary differential equation
We assume that the solution of Eq. (29) has the form (12). Substituting Eq. (12) along Eq. (5) into Eq. (29), we obtain a series of algebraic equations in parameters \(A _{0}\), \(A_{1}\), and η. This class of algebraic equations can be solved, We have:
Substituting Eq. (30) into Eq. (12), we obtain the exact traveling wave solution
Now we discuss three different cases regarding solution (31).
Case 1. When \(\lambda_{1}^{2}-4\lambda_{2}>0\), substituting Eq. (6) into Eq. (31), we obtain the following solution of Eq. (27):
Case 2. When \(\lambda_{1}^{2}-4\lambda_{2}<0\), substituting Eq. (7) into Eq. (31), we obtain the following solution of Eq. (27):
Case 3. When \(\lambda_{1}^{2}-4\lambda_{2}=0\), substituting Eq. (8) into Eq. (31), we obtain the following solution of Eq. (27):
4 Discussion of the results
In this section, we show a good comparison between our results and those obtained by other researchers in different papers by different techniques.
-
By choosing different values of \(A_{i}\) (\(i=1,2\)), Eq. (12) and Eq. (21) have numerous types of particular solutions in the form of trigonometric functions, hyperbolic functions, and rational functions.
However, some of our constructed solutions are likely similar to the following:
-
The solutions of (21) and (22) in [46] are likely similar to our solutions (17) and (34), respectively.
-
The solution of (3.39) and solution of (3.34) in [47] are also likely similar to our solutions (24) and (25), respectively.
-
The solution of (3.12) in [48] is also likely similar to our solution (34).
All our derived solutions are novel and have not been formulated before in any literature and helpful for solving nonlinear problems in mathematics and physics.
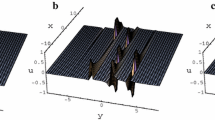
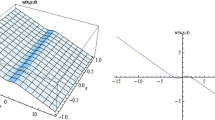
In Fig. 1: Kink solitary waves of solution (15) at (a) and dark solitary waves of solution (16) at (b) are plotted by taking the following values of parameters: \(A_{0}=1.5\), \(\lambda =4\), \(\mu =0.2\), \(\beta =-5\), \(B_{1}=4\), \(B_{2}=2 \) and \(A_{0}=1.5\), \(\lambda =1\), \(\mu =1\), \(\beta =1\), \(B_{1}=-1\), \(B_{2}=-2\), respectively.

In Fig. 2: Solitary wave of solution (17) at (a) and dark solitary wave of solution (24) at (b) are schemed by choosing the following values of parameters: \(A_{0}=1.5\), \(\lambda =2\), \(\mu =1\), \(\beta =-1\), \(B _{1}=-0.2\), \(B_{2}=2 \) and \(A_{0}=1.5\), \(\lambda =4\), \(\mu =0.2\), \(\alpha =-1\), \(B_{1}=-4\), \(B_{2}=-1\), \(\omega =-1 \), respectively.

In Fig. 3: Solitary wave solution (25) at (a) and bright solitary wave solution (26) at (b) are plotted by choosing the following values of parameters: \(A_{0}=1.5\), \(\lambda =1\), \(\mu =1\), \(\alpha =-3\), \(B_{1}=1\), \(B _{2}=2\), \(\omega =1 \) and \(A_{0}=1.5\), \(\lambda =2\), \(\mu =1\), \(\alpha =1\), \(B_{1}=2\), \(B_{2}=2\), \(\omega =1 \), respectively.

In Fig. 4: Kink solitary wave solution (32) at (a) and periodic solitary wave solution (33) at (b) are plotted from the following values of parameters: \(A_{0}=1.5\), \(\lambda =4\), \(\mu =0.2\), \(B_{1}=-4 \), \(B _{2}=-1\) and \(A_{0}=-1.5\), \(\lambda =-1\), \(\mu =1\), \(B_{1}=-1\), \(B _{2}=-1\), respectively.

The movement of different kinds of solitary waves and comparison of our results with those of other researchers illustrate that our method is more efficient and powerful tool to solve nonlinear wave problems in nonlinear sciences.
5 Conclusion
In this paper, we have investigated exact and solitary wave solutions of three important models: the fourth-order nonlinear Ablowitz–Kaup–Newell–Segur equation, the \((2 + 1)\)-dimensional Boussinesq dynamical equation, and the \((3+1)\)-dimensional Yu–Toda–Sasa–Fukuyama equation by successfully applying the algorithm of the \((G'/G)\) expansion method. These solutions help us to appreciate the complex physical phenomena and have crucial importance in applied sciences. The extreme merit of our method is that all calculations are very simple and straightforward, which gives more general solutions than other existing methods, and the reduction in the size of computational work and consistency gives its wider applicability.
References
Zakharov, V.E., Shabat, A.B.: An exact theory of two-dimensional self-focussing and of one-dimensional self-modulation of waves in nonlinear media. Sov. Phys. JETP 34, 62–69 (1972)
Tian, S.-F.: The mixed coupled nonlinear Schrödinger equation on the halfline via the Fokas method. Proc. R. Soc. Lond. A 472(2195), Article ID 20160588 (2016). https://doi.org/10.1098/rspa.2016.0588
Tian, S.-F.: Initial boundary value problems for the general coupled nonlinear Schrödinger equation on the interval via the Fokas method. J. Differ. Equ. 262, 506–558 (2017)
Lü, X., Ma, W.-X., Chen, S.-T., Khalique, C.M.: A note on rational solutions to a Hirota–Satsuma-like equation. Appl. Math. Lett. 58, 13–18 (2016). https://doi.org/10.1016/j.aml.2015.12.019
Zhao, Q., Wu, L.: Darboux transformation and explicit solutions to the generalized TD equation. Appl. Math. Lett. 67, 1–6 (2017). https://doi.org/10.1016/j.aml.2016.11.012
Tian, S.-F., Zhou, S.-W., Jiang, W.-Y., Zhang, H.-Q.: Analytic solutions, Darboux transformation operators and supersymmetry for a generalized one-dimensional time-dependent Schrödinger equation. Appl. Math. Comput. 218(13), 7308–7321 (2012). https://doi.org/10.1016/j.amc.2012.01.009
Wang, M., Wang, Q.: Application of rational expansion method for stochastic differential equations. Appl. Math. Comput. 218, 5259–5264 (2012)
Syam Kumar, A.M., Prasanth, J.P., Bannur, V.M.: Quark–gluon plasma phase transition using cluster expansion method. Phys. A, Stat. Mech. Appl. 432, 71–75 (2015). https://doi.org/10.1016/j.physa.2015.03.015
Arshad, M., Seadawy, A.R., Lu, D., Wang, J.: Travelling wave solutions of Drinfel’d–Sokolov–Wilson, Whitham–Broer–Kaup and \((2+1)\)-dimensional Broer–Kaup–Kupershmit equations and their applications. Chin. J. Phys. 5, 780–797 (2017). https://doi.org/10.1016/j.cjph.2017.02.008
Lu, D., Seadawy, A.R., Arshad, M., Wang, J.: New solitary wave solutions of \((3 + 1)\)-dimensional nonlinear extended Zakharov–Kuznetsov and modified KdV–Zakharov–Kuznetsov equations and their applications. Results Phys. 7, 899–909 (2017). https://doi.org/10.1016/j.rinp.2017.02.002
Tariq, K.U.-H., Seadawy, A.R.: Bistable bright-dark solitary wave solutions of the \((3 + 1)\)-dimensional Breaking soliton, Boussinesq equation with dual dispersion and modified Korteweg–de Vries–Kadomtsev–Petviashvili equations and their applications. Results Phys. 7, 1143–1149 (2017). https://doi.org/10.1016/j.rinp.2017.03.001
Tian, S.-F., Zou, L., Ding, Q., Zhang, H.-Q.: Conservation laws, bright matter wave solitons and modulational instability of nonlinear Schrödinger equation with time-dependent nonlinearity. Commun. Nonlinear Sci. Numer. Simul. 17(8), 3247–3257 (2012)
Seadawy, A.R.: Modulation instability analysis for the generalized derivative higher order nonlinear Schrödinger equation and its the bright and dark soliton solutions. J. Electromagn. Waves Appl. 31(14), 1353–1362 (2017). https://doi.org/10.1080/09205071.2017.1348262
Ali, A., Seadawy, A.R., Lu, D.: Soliton solutions of the nonlinear Schrödinger equation with the dual power law nonlinearity and resonant nonlinear Schrödinger equation and their modulation instability analysis. Optik, Int. J. Light Electron Opt. 145 (2017). https://doi.org/10.1016/j.ijleo.2017.07.016
Seadawy, A.R., El-Rashidy, K.: Water wave solutions of the coupled system Zakharov–Kuznetsov and generalized coupled KdV equations. Sci. World J. 2014, Article ID 724759 (2014). https://doi.org/10.1155/2014/724759
Seadawy, A.R.: Approximation solutions of derivative nonlinear Schrödinger equation with computational applications by variational method. Eur. Phys. J. Plus 130, Article ID 182 (2015). https://doi.org/10.1140/epjp/i2015-15182-5
Seadawy, A.R.: Exact solutions of a two-dimensional nonlinear Schrödinger equation. Appl. Math. Lett. 25, 687–691 (2012)
Khater, A.H., Helal, M.A., Seadawy, A.R.: General soliton solutions of n-dimensional nonlinear Schrödinger equation. Il Nuovo Cimento B 115, 1303–1312 (2000)
Yang, X.-J.: A new integral transform operator for solving the heat-diffusion problem. Appl. Math. Lett. 64, 193–197 (2017)
Seadawy, A.R.: Solitary wave solutions of tow-dimensional nonlinear Kadomtsev–Petviashvili dynamic equation in a dust acoustic plasmas. Pramana J. Phys. 89, Article ID 49 (2017). https://doi.org/10.1007/s12043-017-1446-4
Seadawy, A.R., El-Rashidy, K.: Rayleigh–Taylor instability of the cylindrical flow with mass and heat transfer. Pramana J. Phys. 87, Article ID 20 (2016). https://doi.org/10.1007/s12043-016-1222-x
Yang, X.-J., Gao, F., Srivastava, H.M.: Exact travelling wave solutions for the local fractional two-dimensional Burgers-type equations. Comput. Math. Appl. 73(2), 203–210 (2017)
Gao, F., Yang, X.-J., Srivastava, H.M.: Exact traveling-wave solutions for a new non-linear heat transfer equation. Therm. Sci. 21(4), 1833–1838 (2017). https://doi.org/10.2298/TSCI161013321G
Yang, X.-J., Tenreiro Machado, J.A., Baleanu, D., Cattani, C.: Travelling-wave solutions for Klein–Gordon and Helmholtz equations on Cantor sets. Proc. Inst. Math. Mech. Natl. Acad. Sci. Azerb. 43(1), 123–131 (2017)
Yang, X.-J., Baleanu, D., Gao, F.: New analytical solutions for Klein–Gordon and Helmholtz equations in fractal dimensional space. Proc. Rom. Acad., Ser. A: Math. Phys. Tech. Sci. Inf. Sci. 18(3), 231–238 (2016)
Yang, X.-J., Gao, F., Srivastava, H.M.: A new computational approach for solving nonlinear local fractional PDEs. J. Comput. Appl. Math. 339, 285–296 (2017). https://doi.org/10.1016/j.cam.2017.10.007
Yang, X.-J., Tenreiro Machado, J.A., Baleanu, D.: Exact traveling-wave solution for local fractional Boussinesq equation in fractal domain. Fractals 25(04), Article ID 1740006 (2017). https://doi.org/10.1142/S0218348X17400060
Baleanu, D., Inc, M., Yusuf, A., Aliyu, A.I.: Traveling wave solutions and conservation laws for nonlinear evolution equation. J. Math. Phys. 59(2), Article ID 023506 (2018). https://doi.org/10.1063/1.5022964
Baleanu, D., Inc, M., Yusuf, A., Aliyu, A.I.: Optical solitons, nonlinear self-adjointness and conservation laws for Kundu–Eckhaus equation. Chin. J. Phys. 55, 2341–2355 (2017). https://doi.org/10.1016/j.cjph.2017.10.010
Inc, M., Aliyu, A.I., Yusuf, A., Baleanu, D.: New solitary wave solutions and conservation laws to the Kudryashov–Sinelshchikov equation. Optik, Int. J. Light Electron Opt. 142, 665–673 (2017). https://doi.org/10.1016/j.ijleo.2017.05.055
Tchier, F., Aliyu, A.I., Yusuf, A., Inc, M.: Dynamics of solitons to the ill-posed Boussinesq equation. Eur. Phys. J. Plus 132, Article ID 136 (2017). https://doi.org/10.1140/epjp/i2017-11430-0
Inc, M., Yusuf, A., Aliyu, A.I., Hashemi, M.S.: Soliton solutions, stability analysis and conservation laws for the brusselator reaction diffusion model with time- and constant-dependent coefficients. Eur. Phys. J. Plus 133, Article ID 168 (2018). https://doi.org/10.1140/epjp/i2018-11989-8
Inc, M., Aliyu, A.I., Yusuf, A., Baleanu, D.: Soliton solutions and stability analysis for some conformable nonlinear partial differential equations in mathematical physics. Opt. Quantum Electron. 50, Article ID 190 (2018). https://doi.org/10.1007/s11082-018-1459-3
Inc, M., Aliyu, A.I., Yusuf, A., Baleanu, D.: Fractional optical solitons for the conformable space–time nonlinear Schrödinger equation with Kerr law nonlinearity. Opt. Quantum Electron. 50, Article ID 139 (2018). https://doi.org/10.1007/s11082-018-1410-7
Seadawy, A.: The generalized nonlinear higher order of KdV equations from the higher order nonlinear Schrödinger equation and its solutions. Optik, Int. J. Light Electron Opt. 139, 31–43 (2017)
Seadawy, A.R.: Travelling wave solutions of a weakly nonlinear two-dimensional higher order Kadomtsev–Petviashvili dynamical equation for dispersive shallow water waves. Eur. Phys. J. Plus 132, Article ID 29 (2017)
Khater, A.H., Callebaut, D.K., Malfliet, W., Seadawy, A.R.: Nonlinear dispersive Rayleigh–Taylor instabilities in magnetohydro-dynamic flows. Phys. Scr. 64, 533–547 (2001)
Khater, A.H., Callebaut, D.K., Seadawy, A.R.: Nonlinear dispersive Kelvin–Helmholtz instabilities in magnetohydrodynamic flows. Phys. Scr. 67, 340–349 (2003)
Inc, M.: On numerical soliton solution of the Kaup–Kupershmidt equation and convergence analysis of the decomposition method. Appl. Math. Comput. 172, 72–85 (2005)
Inc, M.: New exact solutions for the ZK–MEW equation by using symbolic computation. Appl. Math. Comput. 189, 508–513 (2007)
Bektaş, M.: On exact special solutions of integrable nonlinear dispersive equation. Chaos Solitons Fractals 39, 1920–1927 (2009)
Inc, M.: New exact solitary pattern solutions of the nonlinearly dispersive \(R(m,n)\) equations. Chaos Solitons Fractals 29, 499–505 (2006)
Inc, M., Kiliç, B.: Classification of travelling wave solutions for the time-fractional fifth-order KdV-like equation. Waves Random Complex Media 24, 393–403 (2014)
Helal, M.A., Seadawy, A.R., Zekry, M.H.: Stability analysis solutions for the fourth-order nonlinear Ablowitz–Kaup–Newell–Segur water wave equation. Appl. Math. Sci. 7, 3355–3365 (2013)
Ali, A., Seadawy, A.R., Lu, D.: Dispersive solitary wave soliton solutions of \((2 + 1)\)-dimensional Boussinesq dynamical equation via extended simple equation method. J. King Saud Univ., Sci. (2018). https://doi.org/10.1016/j.jksus.2017.12.015
Seadawy, A.R., Lu, D., Khater, M.M.A.: Bifurcations of traveling wave solutions for Dodd–Bullough–Mikhailov equation and coupled Higgs equation and their applications. Chin. J. Phys. 55(4), 1310–1318 (2017). https://doi.org/10.1016/j.cjph.2017.07.005
Seadawy, A.R., Lu, D., Khater, M.M.A.: Bifurcations of solitary wave solutions for the three dimensional Zakharov–Kuznetsov–Burgers equation and Boussinesq equation with dual dispersion. Optik 143, 104–114 (2017)
Seadawy, A.R., Lu, D., Khater, M.M.A.: Solitary wave solutions for the generalized Zakharov–Kuznetsov–Benjamin–Bona–Mahony nonlinear evolution equation. J. Ocean Eng. Sci. 2, 137–142 (2017)
Acknowledgements
The author thanks the referees for their suggestions and comments.
Funding
No funding was received.
Author information
Authors and Affiliations
Contributions
All parts contained in the research carried out by the authors through hard work and a review of the various references and contributions in the field of mathematics and applied physics. All authors are read and approved the manuscript.
Corresponding authors
Ethics declarations
Competing interests
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors. The authors did not have any competing interests in this research.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Ali, A., Seadawy, A.R. & Lu, D. New solitary wave solutions of some nonlinear models and their applications. Adv Differ Equ 2018, 232 (2018). https://doi.org/10.1186/s13662-018-1687-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1687-7