
Abstract
The objective of this paper is to present a technique for order preference by similarity to ideal solution (TOPSIS) algorithm to linear fractional bi-level multi-objective decision-making problem. TOPSIS is used to yield most appropriate alternative from a finite set of alternatives based upon simultaneous shortest distance from positive ideal solution (PIS) and furthest distance from negative ideal solution (NIS). In the proposed approach, first, the PIS and NIS for both levels are determined and the membership functions of distance functions from PIS and NIS of both levels are formulated. Linearization technique is used in order to transform the non-linear membership functions into equivalent linear membership functions and then normalize them. A possible relaxation on decision for both levels is considered for avoiding decision deadlock. Then fuzzy goal programming models are developed to achieve compromise solution of the problem by minimizing the negative deviational variables. Distance function is used to identify the optimal compromise solution. The paper presents a hybrid model of TOPSIS and fuzzy goal programming. An illustrative numerical example is solved to clarify the proposed approach. Finally, to demonstrate the efficiency of the proposed approach, the obtained solution is compared with the solution derived from existing methods in the literature.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Bi-level programming is recognized as a powerful mathematical apparatus for modeling decentralized decisions with two decision makers (DMs) in a large hierarchical organization. Bi-level programming problems (BLPPs) have the following common features: the first-level decision maker (FLDM) or the leader and the second-level decision maker (SLDM) or the follower independently controls a set of decision variables; each DM tries to maximize his/her own interest, but the decision of each DM is affected by the action and reaction of the other DM; each DM should have an intention to cooperate each other in the decision-making situation. Bi-level programming has been applied to model real-world problems regarding flow shop scheduling (Karlof and Wang 1996), bio-fuel production (Bard et al. 2000), natural gas cash-out (Dempe et al. 2005), logistics (Huijun et al. 2008), pollution emission price (Wang et al. 2011), etc. Lai (1996) introduced the concept of tolerance membership function of fuzzy set theory to multi-level programming problems (MLPPs) for satisfactory decisions. Shih et al. (1996) extended Lai’s satisfactory solution concept and proposed a supervised search approach to MLPPs based on max–min aggregation operator. Shih and Lee (2000) further extended Lai’s satisfactory solution concept and presented a solution methodology for MLPPs using compensatory fuzzy operator. Sinha (2003a, b) developed an alternative fuzzy mathematical programming to MLPPs where the decision of lower-level DM is most important and the decision power of lower-level DM dominates the FLDM. Sakawa et al. (1998) developed interactive fuzzy programming algorithm to solve MLPPs by deleting the fuzzy goals for the decision variables to overcome the problem in the methods of Lai (1996). Pramanik and Roy (2007) proposed a methodology based on fuzzy goal programming (FGP) approach to MLPPs by considering the relaxation of decision of the FLDM and solved the problem by minimizing the negative deviational variables. In this article, we have considered linear fractional bi-level multi-objective decision-making (BL-MODM) problem where each level DM possesses multiple linear fractional objective functions with common linear constraints. However, in contrast to linear BLPPs, only some methodological developments for fuzzy linear fractional BLPPs/decentralized BLPPs have appeared in the literature (Sakawa and Nishizaki 2002, 2001; Ahlatcioglu and Tiryaki 2007; Mishra 2007; Toksarı 2010; Pramanik and Dey 2011b; Pramanik et al. 2012). Baky (2009) presented an algorithm to solve decentralized BL-MODM problem by extending the FGP approach incorporated by Mohamed (1997) and the proposed approach is also extended for solving linear fractional decentralized BL-MODM problem. Abo-Sinna and Baky (2010) presented a FGP procedure to linear fractional BL-MODM problem using the method of variable change on the negative and positive deviational variables.
In the field of multi-attribute decision-making, Hwang and Yoon (1981) introduced the concept of technique for order preference by similarity to ideal solution (TOPSIS) for obtaining compromise solution. TOPSIS is based upon the principle that the chosen alternative should have the minimum distance from positive ideal solution (PIS) and maximum distance from negative ideal solution (NIS). In real-life decision-making situation, a DM desires to obtain a decision that not only offers as much return as possible but also reduces as much risk as possible. Generally, TOPSIS converts M number of conflicting and non commensurable objectives (criteria) into two commensurable and most of time conflicting objectives (the minimum distance from PIS and the maximum distance from NIS) (Abo-Sinna and Amer 2005). Lai et al. (1994) presented a methodology based on the extended TOPSIS method for solving multi-objective decision-making (MODM) problem. Chen (2000) extended the concept of TOPSIS in order to formulate a methodology for solving multi-person multi-criteria decision-making (MCDM) problems in fuzzy environment. Abo-Sinna and Amer (2005) and Abo-Sinna et al. (2008) studied the extensions of TOPSIS for solving multi-objective large-scale non-linear programming problems with block angular structure. Recently, Baky and Abo-Sinna (2013) proposed a fuzzy TOPSIS algorithm for solving non-linear BL-MODM problems. In their approach, they extended the TOPSIS to first (upper)-level MODM problem for obtaining the satisfying solution for FLDM. Then the linear membership functions of variables under the control of the FLDM are formulated. Finally, max–min decision model of the BL-MODM problem is solved in order to generate the satisfactory solution of the problem.
In this paper, the TOPSIS approach to solve linear fractional BL-MODM problem based on FGP technique is extended. In the proposed approach, fuzzy TOPSIS models for both level DMs are developed and satisfactory solutions for both levels are obtained. Possible relaxations on decisions for both levels are considered. Thereafter, FGP models are formulated and the linear fractional BL-MODM problem is solved by minimizing the negative deviational variables.
Rest of the paper is organized as follows: In the Sect. “Problem formulation”, we present the formulation of BL-MODM problem. Some basic concepts of the distance measures of ‘closeness’ and its normalization are provided in the subsequent sections. TOPSIS approaches for first-level DM and second-level DM are discussed in the next two sections, respectively. Section “Preference bounds for FLDM and SLDM” briefly discusses the necessity for providing preference upper and lower bounds for both level DMs. In the Sect. “FGP approach for BL-MODM problem”, we have formulated the FGP models for BL-MODM problem. The next section presents the TOPSIS algorithm for BL-MODM problem based on FGP procedure. Section “Selection of optimal compromise solution” provides the selection criteria in order to achieve optimal compromise solution of the problem. In the Sect. “Numerical example”, a numerical example is solved to illustrate the proposed methodology. Finally, the last section concludes the paper with future direction of research.
Materials and methods
Problem formulation
Assume that there are two levels in a hierarchy structure with a FLDM at the first level and a SLDM at the second level. The FLDM controls the decision vector and the SLDM controls the decision vector , where N = N1 + N2. Also we assume that Z1 (x1, x2): , i = 1, 2.
The linear fractional BL-MODM problem of maximization-type objective function at each level can be formulated as:
[First level]
[Second level]
Subject to
where
Here, S is the non-empty convex constraint set, M1 and M2 are the number of objective functions of FLDM and SLDM, respectively, and M is the number of constraints. Also, Ai is the matrix, (i = 1, 2); Cij, ; are scalars. We also assume that for all .
Some basic concepts regarding distance measures
Some basis concepts related to distance measure are presented in this section, for further details see Abo-Sinna and Amer (2005) and Abo-Sinna et al. (2008). Let Z(x) = (z1 (x), z2 (x), …, zM (x)) be the vector of the objective functions. Suppose that be the ideal solution or PIS of the vector of the objective functions such that . Also, let () be the anti-ideal solution or NIS of the vector of the objective functions such that , (j = 1, 2, …, M). Now LQ-metric is employed in order to achieve the measure of “closeness”. LQ-metric defines the distance between Z (x) and Z+ as follows:
Here, (j = 1, 2, …, M; q = 1, 2, …, ∞) represents the relative weight of the jth objective function. However, if the objective function z j (x), (j = 1, 2, …, M) is not expressed in commensurable unit, then the following metric can be utilized:
The compromise solution is defined as the solution, which is nearest to the ideal solution by some distance measure (Abo-Sinna and Amer 2005). We are now interested in obtaining the compromise solution of the following MODM problem:
Subject to
Different multi-objective methods such as global criterion method, goal programming method, fuzzy programming method, and interactive method utilize the distance family (4) and (5) in order to yield the compromise solution of a MODM problem when the ideal solution () is the reference point. According to Lai et al. (1994), the problem (6) reduces to the following auxiliary problem:
Subject to
Here, the parameter q represents the ‘balancing factor’ between the group benefit and maximal individual regret. As the value of q increases, the group benefit, i.e., d q decreases. When q = 1, then an equal importance or weight is given to each deviation and when q = 2, then each deviation is weighted proportionately with the maximum deviation with the maximum importance or weight (Lai et al. 1994).
TOPSIS method for first-level MODM problem
Consider the linear fractional BL-MODM problem of FLDM as follows:
Subject to
TOPSIS model for FLDM can be presented as follows:
Subject to
where and .
Here, and , (j = 1, 2, …, M1) are the PIS and NIS for FLDM, respectively.
Let and
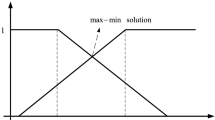
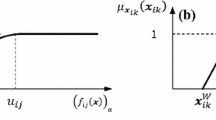
The membership functions for (x) and (x) (see Fig. 1) can be formulated as:

The membership functions of (Lai et al. 1994)
Now we transform the non-linear membership functions and into equivalent linear membership functions and , respectively, through first-order Taylor polynomial series as follows:
where is such that
where is such that
We now normalize and according to Stanojević (2013) as follows:
where and are the minimal and maximal values of ; and are the minimal and maximal values of , respectively, subject to the system constraints.
Then to obtain the satisfactory solution of FLDM, we solve the following max–min decision model, according to Bellman and Zadeh (1970) and Zimmermann (1978) as follows:
If , then the above model is equivalent to the Tchebycheff model (Lai et al. 1994), which is also equivalent to the following model:
Subject to
where represents the satisfactory level for both criteria of the minimal distance from the PIS and maximal distance from the NIS. Let be the satisfactory solution of the FLDM.
TOPSIS method for second-level MODM problem
Consider the linear fractional BL-MODM problem of SLDM as follows:
Subject to
TOPSIS model for SLDM can be represented as:
Subject to
where and .
Here, and , (j = 1, 2, …, M2) are the positive ideal solutions and negative ideal solutions for SLDM, respectively.
Let and
The membership functions of and can be formulated as follows:
We again transform the non-linear membership functions and into equivalent linear membership functions and , respectively, via first-order Taylor polynomial series as follows:
where is such that .
where is such that
We normalize (Stanojević 2013) and as follows:
, where and are the minimal and maximal values of , respectively, and and are the minimal and maximal values of , respectively, over the system constraints.
Now in order to achieve the satisfactory solution of SLDM, we solve the following max–min decision model:
Subject to
where represents the satisfactory level for both criteria of the minimal distance from the PIS and maximal distance from the NIS for SLDM. Let be the maximizing solution of the model (17) and also the satisfactory solution of the SLDM.
Preference bounds for FLDM and SLDM
In a BLPP, the objectives or goals of both level DMs are often conflicting in nature. So, cooperation between both level DMs is necessary for a hierarchical organization in order to sustain in the open and increasing competitive markets. For the smooth functioning and the benefit of the organization, FLDM and SLDM should provide some relaxations on their decisions to reach at a satisfactory solution (Pramanik and Dey 2011a; Mishra 2007). Let and , (m = 1, 2, …, N1) be the lower and upper tolerance values on the decision vector considered by FLDM, where = (, , …, ) such that
Also let and , (n = 1, 2,…, N2) be the lower and upper tolerance values on the decision vector considered by SLDM, where = (, , …, ) such that
Here we consider that both level decision makers provide relaxation on their decision. This happens in real decision-making situation. For example, when FLDM needs extra time duty (overtime duty) from SLDM to produce more production to meet the urgent market demands (because of festivals like Durga puja, Id or other reasons), then it depends upon the decision of the SLDM whether he/she relaxes his decision to perform extra duties. If SLDM relaxes his/her decision to perform overtime duty, it gives the organization opportunity to run smoothly and compete with other organizations. So the relaxation of SLDM is justified.
FGP approach for BL-MODM problem
Now the crisp BL-MODM problem defined in the ‘problem formulation’ section is reduced to the following fuzzy BL-MODM problem as follows:
Subject to
In fuzzy decision-making environment, the objective of each level DM is to obtain maximum possible membership value (one) of the corresponding fuzzy goal. Now, for the defined membership goals in (18), the flexible membership goals according to Pramanik and Roy (2007) with aspiration level one can be formulated as:
where , , and (≥0) are the negative deviational variables.
However, Pramanik and Dey (2011a) imposed restriction on the negative deviational variable.
Therefore, the new FGP formulation according to Pramanik and Dey (2011a) for BL-MODM problem can be formulated as follows:
Model (I):
Subject to
Here, the DMs can take the normalized weight, i.e., with w i = 1/4 or any preference weight in the decision-making environment.
Model (II):
Subject to
Selection of optimal compromise solution
To obtain the optimal compromise solution of problem, the family of distance functions (Zeleny 1982) is defined as follows:
Here, (k = 1, 2, …, K) denotes the degree of closeness of the preferred compromise solution to the optimal compromise solution vector with respect to kth objective function. Also, = (,,…, ) represents the vector of attribute level such that = 1. If all the attribute levels are same, then = 1/K for k = 1, 2, …, K. Here, denotes the distance parameter.
Now for r = 2, the family of distance functions become
For minimization type problem, = (the individual best solution/the preferred compromise solution) and maximization type of problem = (the preferred compromise solution/the individual best solution). The solution for which will be minimal would be the optimal compromise solution for the problem.
The TOPSIS algorithm for solving linear fractional BL-MODM problem
We now present the TOPSIS algorithm for solving linear fractional BL-MODM problem based on FGP technique by the following steps:
Step 1: Determine the individual maximum and minimum values of all the objective functions for both level DMs subject to the system constraints.
Step 2: Identify the positive ideal solution and negative ideal solution for FLDM and construct and for FLDM.
Step 3: Ask the DMs to select q (q = 1, 2, …, ∞).
Step 4: Calculate the maximum and minimum values of and subject to the system constraints.
Step 5: Formulate the membership functions and .
Step 6: Linearize the non-linear membership functions and into equivalent linear membership functions and , respectively, using first-order Taylor polynomial series.
Step 7: Normalize and .
Step 8: Formulate the model (12) and solve the model to find the satisfactory solution of FLDM.
Step 9: FLDM provides the negative and positive tolerance values and (m = 1, 2, …, N1), respectively, on the decision vector .
Step 10: Find the positive ideal solution and negative ideal solution for SLDM and construct and for SLDM.
Step 11: Calculate the maximum and minimum values of and subject to the system constraints.
Step 12: Construct the membership functions and .
Step 13: Linearize the non-linear membership functions and into equivalent linear membership functions and , respectively, by utilizing first-order Taylor polynomial series.
Step 14: Normalize and .
Step 15: Formulate the model (17) and solve the model to obtain the satisfactory solution of SLDM.
Step 16: SLDM presents the negative and positive tolerance values and , respectively, on the decision vector .
Step 17: Formulate the FGP models (19) and (20) for linear fractional BL-MODM problem.
Step 18: Solve the FGP models (19) and (20) to obtain the compromise solution of the BL-MODM problem.
Step 19: Distance function L2 (, k) is utilized in order to recognize the optimal compromise solution of the problem.
Step 20: If the solution is acceptable to both level DMs then stop. Otherwise, modify the lower and upper preference values of both level DMs and go to Step 17.
Results and discussion
Numerical example
Consider the following numerical example studied by Dey et al. (2013) with some changes in the first objective function of SLDM in order to clarify the proposed procedure.
[First level]
[Second level]
Subject to
First-level MODM problem:
Subject to
The individual best (maximum) solution (PIS) of the objective functions subject to the constraints is = 3.029 at (1.714, 1.571) and = 1.231 at (2.5, 0) and the individual worst (minimum) solution (NIS) of the objective functions subject to the constraints is = 1.6 at (1, 0) and = 1 at (0.251, 0.749).
Let us assume that = = 0.5, and q = 2.
Also we determine: at (1.723, 1.554); at (1, 0); at (1.714, 1.571); at (1, 0).
The membership functions of (x) and (x) can be formulated as follows:
Transform the non-linear membership functions and into equivalent linear membership functions and , respectively, by applying first-order Taylor polynomial series as follows:
(1.723, 1.554) + (x1 − 1.723) + (x2 − 1.554) = 1 + (x1 − 1.723) × 0.226 + (x2 − 1.554) × 0.113, where = 1 at = (1.723, 1.554),
(1.714, 1.571) + (x1 − 1.714) + (x2 − 1.571) = 1 + (x1 − 1.714) × 0.053 + (x2 − 1.571) × 0.474, where = 1 at = (1.714, 1.571).
Normalize and :
, where and = 0.548;
Solve the following model in order to get the satisfactory solution of FLDM:
Subject to
We get the satisfactory solution of the FLDM as = (,) = (1.714, 1.571) with = 1. Suppose that the FLDM decides = 1.714 with upper tolerance = 0.286 and lower tolerance = 0.214 such that 1.714 − 0.214 ≤ x1 ≤1.714 + 0.286.
Second-level MODM problem:
Subject to
The individual best solution of the objective functions of SLDM subject to the constraints is = 2.143 at (2.5, 0) and = 3.5 at (0, 1) and the individual worst solution of the objective functions of SLDM subject to the constraints is = 0.333 at (0, 1) and = 0.2 at (2.5, 0).
Also we calculate: at (1, 0); at (1.714, 1.571); at (0, 1); at (1.847, 1.305).
The membership functions of (x) and (x) can be constructed as:
We also transform the non-linear membership functions and into equivalent linear membership functions and , respectively, using first-order Taylor polynomial series as:
=1 + (x1 − 1) × (−1.22) + (x2 − 0) × (−2.474), where
where at
Normalize and :
Solve the following model in order to get the satisfactory solution of SLDM:
Subject to
We obtain the satisfactory solution of the SLDM as with . Also let the SLDM decides with upper tolerance and lower tolerance such that 0.307 − 0.057 ≤ x2 ≤ 0.307 + 0.693.
Finally, the FGP models for solving linear fractional BL-MODM problem are presented as follows:
Model (I):
Subject to
The solution of the FGP model (I) is presented in Table 1.
Model (II):
Subject to
The solution offered by the FGP model (II) is presented in Table 1.
On comparing the distance function (see the Table 1), we observe that our proposed FGP Model (II) offers better compromise optimal solution than the solution obtained by Dey et al. (2013) and Baky and Abo-Sinna (2013). Therefore, the compromise optimal solution of the problem is obtained as x1 = 1.5, x2 = 0.645.
Note 1: Solutions of the problem are obtained using software Lingo version 6.
Conclusion
We have presented a new approach for dealing with linear fractional BL-MODM problem. In the paper, we have studied TOPSIS approach for solving linear fractional BL-MODM problem, which is a hybrid model of TOPSIS and fuzzy goal programming. In the proposed approach, first the membership functions of distance functions from PIS and NIS of first and second levels are formulated. Linearization technique is used in order to transform the non-linear membership functions into equivalent linear membership functions using first-order Taylor series approximation and normalization technique (Stanojević 2013) is employed to normalize them. Thereafter, max–min models are formulated in order to obtain the satisfactory decision for each level DM. Both level DMs consider a possible relaxation on their decision for the benefit of the hierarchical organization. The FGP models are then developed in order to achieve highest degree of the membership goals of both level DMs by minimizing negative deviational variables. Distance functions are also utilized to identify optimal compromise solution. Finally, an illustrative numerical example is provided to demonstrate the effectiveness of the proposed TOPSIS approach. We hope that the proposed methodology can be effective in dealing with the non-linear BL-MODM, multi-level MODM problems and other real-world decision-making problems.
References
Abo-Sinna MA, Amer AH (2005) Extensions of TOPSIS for multiobjective large-scale nonlinear programming problems. Appl Math Comput 162(1):243–256
Abo-Sinna MA, Baky IA (2010) Fuzzy goal programming procedure to bilevel multiobjective linear fraction programming problems. Int J Math Math Sci 01–15, ID 148975 (2010) 01–15. doi:10.1155/2010/148975
Abo-Sinna MA, Amer AH, Ibrahim AS (2008) Extensions of TOPSIS for large scale multi-objective non-linear programming problems with block angular structure. Appl Math Model 32(3):292–302
Ahlatcioglu M, Tiryaki F (2007) Interactive fuzzy programming for decentralized two-level linear fractional programming (DTLLFP) problems. Omega 35(4):432–450
Baky IA (2009) Fuzzy goal programming algorithm for solving decentralized bi-level multi-objective programming problems. Fuzzy Sets Syst 160(18):2701–2713
Baky IA, Abo-Sinna MA (2013) TOPSIS for bi-level MODM problems. Appl Math Model 37(3):1004–1015
Bard JF, Plummer J, Sourie JC (2000) A bilevel programming approach to determining tax credits for biofuel production. Eur J Oper Res 120(1):30–46
Bellman RE, Zadeh LA (1970) Decision-making in a fuzzy environment. Manage Sci 17(4):141–164
Chen CT (2000) Extensions of the TOPSIS for group decision-making under fuzzy environment. Fuzzy Sets Syst 114(1):1–9
Dempe S, Kalasnikov V, Marcado RZR (2005) Discrete bilevel programming: application to a natural gas cash-out problem. Eur J Oper Res 166(2):469–488
Dey PP, Pramanik S, Giri BC (2013) A fuzzy goal programming algorithm for solving bi-level multi-objective linear fractional programming problems. Int J Math Archive 4(8):154–161
Huijun S, Ziyou G, Jianjun W (2008) A bi-level programming model and solution algorithm for the location of logistics distribution centers. Appl Math Model 32(4):610–616
Hwang CL, Yoon K (1981) Multiple attribute decision making: methods and applications. Springer-Verlag, Heidelberg
Karlof JK, Wang W (1996) Bilevel programming applied to the flow shop scheduling problem. Comput Oper Res 23(5):443–451
Lai YJ (1996) Hierarchical optimization: a satisfactory solution. Fuzzy Sets Syst 77(3):321–335
Lai YJ, Liu TJ, Hwang CL (1994) TOPSIS for MODM. Eur J Oper Res 76(3):486–500
Mishra S (2007) Weighting method for bi-level linear fractional programming problems. Eur J Oper Res 183(1):296–302
Mohamed RH (1997) The relationship between goal and fuzzy programming. Fuzzy Sets Syst 89(2):215–222
Pramanik S, Dey PP (2011a) Quadratic bi-level programming problem based on fuzzy goal programming approach. Int J Softw Eng Appl (IJSEA) 32(4):41–59
Pramanik S, Dey PP (2011b) Bi-level linear fractional programming problem based on fuzzy goal programming approach. Int J Comput Appl 25(11):34–40
Pramanik S, Roy TK (2007) Fuzzy goal programming approach to multi-level programming problems. Eur J Oper Res 176(2):1151–1166
Pramanik S, Dey PP, Roy TK (2012) Fuzzy goal programming approach to linear fractional bilevel decentralized programming problem based on Taylor series approximation. J Fuzzy Math 20(1):231–238
Sakawa M, Nishizaki I (2001) Interactive fuzzy programming for two-level linear fractional programming problem. Fuzzy Sets Syst 119(1):31–40
Sakawa M, Nishizaki I (2002) Interactive fuzzy programming for decentralized two-level linear fractional programming problem. Fuzzy Sets Syst 125(3):301–315
Sakawa M, Nishizaki I, Uemura Y (1998) Interactive fuzzy programming for multilevel linear programming problems. Comput Math Appl 36(2):71–86
Shih HS, Lee ES (2000) Compensatory fuzzy multiple level decision making. Fuzzy Sets Syst 114(1):71–87
Shih HS, Lai YJ, Lee ES (1996) Fuzzy approach for multi-level programming problems. Comput Oper Res 23(1):73–91
Sinha S (2003a) Fuzzy mathematical programming applied to multi-level programming problems. Comput Oper Res 30(9):1259–1268
Sinha S (2003b) Fuzzy programming approach to multi-level programming problems. Fuzzy Sets Syst 136(2):189–202
Stanojević B (2013) A note on ‘Taylor series approach to fuzzy multiple objective linear fractional programming’. Inf Sci 243:95–99
Toksarı MD (2010) Taylor series approach for bi-level linear fractional programming problem. Selçuk J Appl Math 11(1):63–69
Wang GM, Ma LM, Li LL (2011) An application of bilevel programming problem in optimal pollution emission price. J Serv Sci Manag 4:334–338
Zeleny M (1982) Multiple criteria decision making. McGraw-Hill, New York
Zimmermann HJ (1978) Fuzzy programming and linear programming with several objective functions. Fuzzy Sets Syst 1(1):45–55
Conflict of interest
The authors declare that they have no competing interests.
Authors’ contributions
All the authors have contributed equally in the following sections: Introduction, Materials and Methods, Result and Discussion and concluding remarks. All the authors read and approved the final manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution License which permits any use, distribution, and reproduction in any medium, provided the original author(s) and the source are credited.
About this article

Cite this article
Dey, P.P., Pramanik, S. & Giri, B.C. TOPSIS approach to linear fractional bi-level MODM problem based on fuzzy goal programming. J Ind Eng Int 10, 173–184 (2014). https://doi.org/10.1007/s40092-014-0073-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40092-014-0073-7