
Abstract
This paper considers predator–prey systems in which the prey can move between source and sink patches. First, we give a complete analysis on global dynamics of the model. Then, we show that when diffusion from the source to sink is not large, the species would coexist at a steady state; when the diffusion is large, the predator goes to extinction, while the prey persists in both patches at a steady state; when the diffusion is extremely large, both species go to extinction. It is derived that diffusion in the system could lead to results reversing those without diffusion. That is, diffusion could change species’ coexistence if non-diffusing, to extinction of the predator, and even to extinction of both species. Furthermore, we show that intermediate diffusion to the sink could make the prey reach total abundance higher than if non-diffusing, larger or smaller diffusion rates are not favorable. The total abundance, as a function of diffusion rates, can be both hump-shaped and bowl-shaped, which extends previous theory. A novel finding of this work is that there exist diffusion scenarios which could drive the predator into extinction and make the prey reach the maximal abundance. Diffusion from the sink to source and asymmetry in diffusion could also lead to results reversing those without diffusion. Meanwhile, diffusion always leads to reduction of the predator’s density. The results are biologically important in protection of endangered species.





Similar content being viewed by others

References
Andren H (1994) Effects of habitat fragmentation on birds and mammals in landscapes with different proportions of suitable habitat: a review. Oikos 71:355–366
Arditi R, Lobry C, Sari T (2015) Is dispersal always beneficial to carrying capacity? New insights from the multi-patch logistic equation. Theor Popul Biol 106:45–59
Arroyo-Esquivel J, Hastings A (2020) Spatial dynamics and spread of ecosystem engineers: two patch analysis. Bull Math Biol 82:148–162
Aström J, Pärt T (2013) Negative and matrix-dependent effects of dispersal corridors in an experimental metacommunity. Ecology 94:1939–1970
Berezovskaya FS, Song B, Castillo-Chavez C (2010) Role of prey dispersal and refuges on predator-prey dynamics. SIAM J Appl Math 70:1821–1839
Damschen EI et al (2019) Ongoing accumulation of plant diversity through habitat connectivity in an 18-year experiment. Science 365:1478–1480
Franco D, Ruiz-Herrera A (2015) To connect or not to connect isolated patches. J Theor Biol 370:72–80
Freedman HI, Waltman D (1977) Mathematical models of population interactions with dispersal. I. Stability of two habitats with and without a predator. SIAM J Appl Math 32(1977):631–648
Gyllenberg M, Soderbacka G, Ericsson S (1993) Does migration stabilize local population dynamics? Analysis of a discrete metapopulation model. Math Biosci 118:25–49
Hale JK (1969) Ordinary differential equations. Wiley-Interscience, New York
Hofbauer J, Sigmund K (1998) Evolutionary games and population dynamics. Cambridge University Press, Cambridge
Holt RD (1985) Population dynamics in two-patch environments: some anomalous consequences of an optimal habitat distribution. Theor Popul Biol 28:181–207
Huang R, Wang Y, Wu H (2020) Population abundance in predator–prey systems with predators dispersal between two patches. Theor Popul Biol 135:1–8
Hutson V, Lou Y, Mischaikow K (2005) Convergence in competition models with small diffusion coefficients. J Differ Equ 211:135–161
Jansen VA (2001) The dynamics of two diffusively coupled predator–prey populations. Theor Popul Biol 59:119–131
Kang Y, Kumar Sasmal S, Messan K (2017) A two-patch prey–predator model with predator dispersal driven by the predation strength. Math Biosci Eng 14:843–880
Knight TW, Morris DW (1996) How many habitats do landscapes contain? Ecology 77:1756–1764
Li MY, Shuai Z (2010) Global-stability problem for coupled systems of differential equations on networks. J Differ Equ 248:1–20
Lou Y (2006) On the effects of migration and spatial heterogeneity on single and multiple species. J Differ Equ 223:400–426
Morris DW (2002) Measuring the Allee effect: positive density dependence in small mammals. Ecology 83:14–20
Newbold T et al (2015) Global effects of land use on local terrestrial biodiversity. Nature 520:45–50
Pfeifer M et al (2017) Creation of forest edges has a global impact on forest vertebrates. Nature 551:187–191
Qi LX, Gan LJ, Xue M, Sysavathdy S (2015) Predator–prey dynamics with Allee effect in prey refuge. Adv Differ Equ 71:340–351
Ruiz-Herrera A, Torres PJ (2018) Effects of diffusion on total biomass in simple metacommunities. J Theor Biol 447:12–24
Soulé ME, Gilpin ME (1991) The theory of wildlife corridor capability. Nat Conserv 2(1991):3–8
Wang Y (2019) Asymptotic state of a two-patch system with infinite diffusion. Bull Math Biol 81:1665–1686
Wang Y, Wu H, He Y, Wang Z, Hu K (2020) Population abundance of two-patch competitive systems with asymmetric dispersal. J Math Biol 81:315–341
Zhang B, Liu X, DeAngelis DL, Ni W-M, Wang GG (2015) Effects of dispersal on total biomass in a patchy, heterogeneous system: analysis and experiment. Math Biosci 264:54–62
Zhang B, Alex K, Keenan ML, Lu Z, Arrix LR, Ni W-M, DeAngelis DL, David Van Dyken J (2017) Carrying capacity in a heterogeneous environment with habitat connectivity. Ecol Lett 20:1118–1128
Zhang B, DeAngelis DL, Ni WM, Wang Y, Zhai L, Kula A, Xu S, Van Dyken JD (2020) Effect of stressors on the carrying capacity of spatially-distributed metapopulations. Am Nat 196:46–60
Acknowledgements
We would like to thank two anonymous reviewers for their helpful comments on the manuscript. This work was supported by NSF of P.R. China (12071495, 11571382).
Author information
Authors and Affiliations
Contributions
Y. Wang designed research and wrote the first draft; S. Xiao contributed to the mathematical analysis in appendices; S. Wang wrote main text.
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Results for Sect. 2
Proposition 5.1
Solutions of system (1) are nonnegative and bounded.
Proof
Since \(x=0\) is a solution of (1), \(y_1y_2\)-plane is invariant, which implies \(x(t)\ge 0\) as \(t> 0\).
On the boundary \(y_1=0\), from the second equation of (1) we have \(\mathrm{d}y_1/\mathrm{d}t = D y_2\). If \(y_2>0\), then \(\mathrm{d}y_1/\mathrm{d}t >0\), which implies that \(y_1(t)\) is nonnegative when t increases. Assume \(y_2=0\). Since x-axis is an invariant set of system (1), no orbit could pass through the invariant set, which implies that \(y_1(t) \equiv 0\). Thus, \(y_1(t)\ge 0\) when \(t>0\). Similarly, \(y_2(t)\ge 0\) when \(t>0\). Thus, solutions of systems (1) are nonnegative.
Assume that \((x(t),y_1(t), y_2(t))\) is a solution of (1) with \(x(0) \ge 0, y_i(0) \ge 0, i=1,2\). Let \({\bar{r}}=\min \{ r,r_1, r_2 \}\). By adding the three equations of (1), we obtain
From the comparison theorem (Hale 1969), we have
Thus, the solution \((x(t),y_1(t), y_2(t))\) is bounded and system (1) is dissipative. \(\square \)
Proposition 5.2
-
(i)
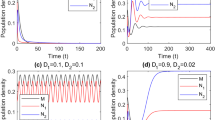
If \(D_1 < D_1^+,\) there is a unique positive equilibrium \(E_{12}(y_1^+,y_2^+)\) of system (2), which is globally asymptotically stable in int\(R_+^2\) as shown in Fig. 1.
-
(ii)
If \(D_1 \ge D_1^+,\) the boundary equilibrium O(0, 0) of system (2) is globally asymptotically stable in int\(R_+^2\).
Proposition 5.3
(Hofbauer and Sigmund 1998)
-
(i)
If \(a_{12} > r/K_1\), there is a unique positive equilibrium \({\bar{E}}({\bar{x}},{\bar{y}}_1)\) of system (3), which is globally asymptotically stable in int\(R_+^2\).
-
(ii)
If \(a_{12} \le r/K_1\), the boundary equilibrium \(E_1(0,K_1)\) of system (3) is globally asymptotically stable in int\(R_+^2\).
Appendix B: Results for Sect. 3
Here, global dynamics of system (1) are shown by constructing Lyapunov functions. Every Lyapunov function is formed by combining the sub-Lyapunov function for each patch by the graph method (see Remark 5.5).
Theorem 5.4
-
(i)
If \(D_1 \ge D_1^+\), the boundary equilibrium O(0, 0, 0) of system (1) is globally asymptotically stable in int\((R_+^3)\), and system (1) is not persistent.
-
(ii)
If \(D_1^- \le D_1 < D_1^+\), the boundary equilibrium \(P_{23}(0, y_1^+,y_2^+)\) of system (1) is globally asymptotically stable in int\((R_+^3)\), and system (1) is not persistent.
-
(iii)
If \(D_1 < D_1^-\), the positive equilibrium \(P^*(x^*,y_1^*,y_2^*)\) of system (1) is globally asymptotically stable in int\((R_+^3)\), and system (1) is uniformly persistent.
Proof
(i) Let
From \(D_1 \ge D_1^+\), we have
Let \(\dfrac{\mathrm{d}V}{\mathrm{d}t}\big |_{(2.1)} =0\). Then, we obtain \(y_1 = 0\), which means \(x =0\) by the first equation of (1), and \(y_2 =0\) by the second equation of (1). By the LaSalle invariance principle, equilibrium O is globally asymptotically stable in int\((R_+^3)\).
(ii) Let
Since \(D_1 \ge D_1^-\), we have \(-\dfrac{r}{a_{12}} + y_1^+ \le 0\). Then,
where we use the inequality \(2- u - \dfrac{1}{u } \le 0\) if \(u > 0\), and the equality holds if and only if \(u =1\). Let \(\dfrac{\mathrm{d}V}{\mathrm{d}t}|_{(2.1)}=0\). Then, we obtain \(y_1 = y_1^+\), which means \( y_2 = y_2^+\) by \(2- \dfrac{y_2 y_1^+ }{y_2^+ y_1 } - \dfrac{y_2^+ y_1 }{y_2 y_1^+ }= 0\). Thus, we obtain \(x = 0\) by the second equation of (2). By the LaSalle invariance principle, equilibrium \(P_{23}\) is globally asymptotically stable in int\((R_+^3)\).
(iii) From \(D_1 < D_1^-\), we have \(D_1 < D_1^+\). Denote
Let \(V=V_1 +V_2\). Then,
where we use the inequality \(2- u - \dfrac{1}{u } \le 0\) if \(u > 0\). Let \(\dfrac{\mathrm{d}V}{\mathrm{d}t}\big |_{(2.1)}=0\). Then, we obtain \(y_1 = y_1^*\), which means x(t) is a constant by the first equation of (1), and then, \(y_2(t)\) is a constant by the second equation of (1). By the uniqueness of positive equilibrium in (1), we obtain that \(x = x^*\) and \(y_2 = y_2^*\). By the LaSalle invariance principle, equilibrium \(P^*\) is globally asymptotically stable in int\((R_+^3)\). \(\square \)
Remark 5.5
Construction of Lyapunov functions in the proof of Proposition 5.2 and Theorem 5.4. We focus on the Lyapunov function in the proof of Theorem 5.4(iii), while similar discussion can be given for others.
When there is no diffusion and the species coexist at \(({\bar{x}},{\bar{y}}_1)\) in patch 1, there is a Lyapunov function for the \((x,y_1)\)-subsystem (Hofbauer and Sigmund 1998):
When there is diffusion and the prey can persist at \(y_2={\bar{y}}_2\) in patch 2, a direct computation shows that there is a Lyapunov function for the \(y_2\)-subsystem:
When there is diffusion and the species coexist at \(P^*(x^*,y_1^*,y_2^*)\) in system (1), we obtain \(V_1, V_2\) from \({\bar{V}}_1, {\bar{V}}_2\) by replacing \({\bar{x}},{\bar{y}}_1,{\bar{y}}_2\) with \(x^*,y_1^*,y_2^*\), where the coefficient \(\dfrac{ D_2 y_2^*}{D_1 y_1^* }\) of \(V_2\) is obtained by the graph method (see Li and Shuai 2010). Thus, we obtain the Lyapunov function
Rights and permissions
About this article

Cite this article
Xiao, S., Wang, Y. & Wang, S. Effects of Prey’s Diffusion on Predator–Prey Systems with Two Patches. Bull Math Biol 83, 45 (2021). https://doi.org/10.1007/s11538-021-00884-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11538-021-00884-6