
Abstract
Zika virus, a reemerging mosquito-borne flavivirus, posed a global public health emergency in 2016. Brazil is the most seriously affected country. Some measures have been implemented to control the Zika transmission, such as spraying mosquitoes, developing vaccines and drugs. However, because of the limited medical resources (LMRs) in the country, not every infected patient can be treated in time when infected with Zika virus. We aim to build a deterministic Zika model by introducing a piecewise smooth treatment recovery rate to research the effect of LMRs on the transmission and control of Zika. For the model without treatment, we analyze the global stability of equilibria. For the model with treatment, the model exhibits complex dynamics. We prove that the model with treatment undergoes backward bifurcation, Hopf bifurcation and Bogdanov–Takens bifurcation of codimension 2. It means that the model with LMRs is sensitive to parameters and initial conditions, which has important significance for control of Zika. We also apply the model to estimate the basic and control reproduction numbers for the Zika transmission by using the data on weekly reported accumulated Zika cases from March 25, 2016, to April 14, 2018, in Brazil.













Similar content being viewed by others


References
Abdelrazec A, Bélair J, Shan C, Zhu H (2016) Modeling the spread and control of dengue with limited public health resources. Math Biosci 271:136–145
Agusto FB, Bewick S, Fagan WF (2017a) Mathematical model for Zika virus dynamics with sexual transmission route. Ecol Complex 29:61–81
Agusto F, Bewick S, Fagan W (2017b) Mathematical model of Zika virus with vertical transmission. Infect Dis Model 2(2):244–267
Almeida-Filho N (2011) Higher education and health care in Brazil. The Lancet 377(9781):1898–1900
Andraud M, Hens N, Marais C, Beutels P (2011) Dynamic epidemiological models for dengue transmission: a systematic review of structural approaches. PLoS ONE 7:3161–3164
Arbex AK, Bizarro VR, Paletti MT et al (2016) Zika Virus controversies: epidemics as a legacy of mega events? Health 8(7):711–722
Barros AJ, Bastos JL, D\({\hat{a}}\)maso AH (2011) Catastrophic spending on health care in Brazil: private health insurance does not seem to be the solution. Cadernos de Saúde P\({\hat{u}}\)blica 27:s254–s262
Brazil Ministry of Health, Zika cases from the Brazil Ministry of Health. http://portalms.saude.gov.br/boletins-epidemiologicos
Camila Z, De MVCA, Pamplona MAL et al (2015) First report of autochthonous transmission of Zika virus in Brazil. Memórias do Inst Oswaldo Cruz 110(4):569–572
Campos GS, Bandeira AC, Sardi SI (2015) Zika virus outbreak, Bahia, Brazil. Emerg Infect Dis 21:1885–1886
Cao-Lormeau VM, Musso D (2014) Emerging arboviruses in the Pacific. Lancet 384(9954):1571–1572
Castillo-Chavez C, Song B (2004) Dynamical models of tuberculosis and their applications. Math Biosci Eng 1(2):361–404
Clarke FH, Ledyaev YS, Stern RJ, Wolenski PR (2008) Nonsmooth analysis and control theory. Springer, Berlin, p 178
Dick GWA, Kitchen SF, Haddow AJ (1952) Zika virus (I). Isolations and serological specificity. Trans R Soc Trop Med Hyg 46(5):509–520
Diekmann O, Heesterbeek JAP, Metz JA (1990) On the definition and the computation of the basic reproduction ratio \(R_{0}\) in models for infectious diseases in heterogeneous populations. J Math Biol 28(4):365–382
Duffy MR et al (2009) Zika virus outbreak on Yap Island, federated states of Micronesia. N Engl J Med 360:2536–2543
Froeschl G et al (2017) Long-term kinetics of Zika virus RNA and antibodies in body fluids of a vasectomized traveller returning from Martinique: a case report. BMC Infect Dis 17(1):55
Funk S et al (2016) Comparative analysis of dengue and Zika outbreaks reveals differences by setting and virus. PLoS Negl Trop Dis 10(12):e0005173
Gao D et al (2016) Prevention and control of Zika fever as a mosquito-borne and sexually transmitted disease. Sci Rep 6:28070
Gourinat AC, O\(^{\prime }\)Connor O, Calvez E, Goarant C, Dupont-Rouzeyrol M (2015) Detection of Zika virus in urine. Emerg Infect Dis 21(1):84
Heesterbeek JAP, Roberts MG (2007) The type-reproduction number T in models for infectious disease control. Math Biosci 206(1):3–10
Hu Z, Teng Z, Jiang H (2012) Stability analysis in a class of discrete SIRS epidemic models. Nonlinear Anal Real World Appl 13(5):2017–2033
Imran M, Usman M, Dur-e-Ahmad M, Khan A (2017) Transmission dynamics of Zika fever: a SEIR based model. Differ Equ Dyn Syst. https://doi.org/10.1007/s12591-017-0374-6
Kucharski AJ et al (2016) Transmission dynamics of Zika virus in island populations: a modelling analysis of the 2013–14 French Polynesia outbreak. PloS Negl Trop Dis 10(5):e0004726
Kuznetsov YA (1995) Elements of applied bifurcation theory, applied mathematical scienses. Springer, New York
Leine RI, Nijmeijer H (2004) Bifurcations of equilibria in non-smooth continuous systems. In: Dynamics and bifurcations of non-smooth mechanical systems. Springer, Berlin, pp 125–176
Leine RI, Van Campen DH (2006) Bifurcation phenomena in non-smooth dynamical systems. Eur J Mech A/Solids 25(4):595–616
Li G, Zhang Y (2017) Dynamic behaviors of a modified SIR model in epidemic diseases using nonlinear incidence and recovery rates. PLoS ONE 12(4):e0175789
Li C et al (2017) 25-Hydroxycholesterol protects host against Zika virus infection and its associated microcephaly in a mouse model. Immunity 46(3):446–456
Lucchese G, Kanduc D (2016) Zika virus and autoimmunity: from microcephaly to Guillain-Barré syndrome, and beyond. Autoimmun Rev 15(8):801–808
Macdonald G (1952) The analysis of equilibrium in malaria. Trop Dis Bull 49:813–829
Marcondes CB, Ximenes MFF (2016) Zika virus in Brazil and the danger of infestation by \(\mathit{Aedes (Stegomyia)}\) mosquitoes. Rev Soc Bras Med Trop 49:4–10
Munoz LS, Barreras P, Pardo CA (2016) Zika virus-associated neurological disease in the adult: Guillain-Barré syndrome, encephalitis, and myelitis. Semin Reprod Med 34(05):273–279
Musso D, Roche C, Robin E et al (2015) Potential sexual transmission of Zika virus. Emerg Infect Dis 21(2):359
Petersen LR, Jamieson DJ, Powers AM et al (2016) Zika Virus. N Engl J Med 374(16):1552–1563
Pizza D et al (2016) A model for the risk of microcephaly induced by the Zika virus (ZIKV). Open J Model Simul 4(03):109
Reznik SE, Ashby CR (2017) Sofosbuvir: an antiviral drug with potential efficacy against Zika infection. Int J Infect Dis 55:29–30
Roa M (2016) Zika virus outbreak: reproductive health and rights in Latin America. Lancet 387:843–843
Roberts MG, Heesterbeek JAP (2003) A new method for estimating the effort required to control an infectious disease. Proc R Soc Lond B Biol Sci 270(1522):1359–1364
Ross R (1911) The prevention of malaria. John Murray, London
Saad-Roy CM, Ma J, van den Driessche P (2018) The effect of sexual transmission on Zika virus dynamics. J Math Biol 77(6–7):1917–1941
Sacramento CQ, De Melo GR, De Freitas CS et al (2017) The clinically approved antiviral drug sofosbuvir inhibits Zika virus replication. Sci Rep 7:40920
Sasmal SK, Ghosh I, Huppert A, Chattopadhyay J (2018) Modeling the spread of Zika virus in a stage-structured population: effect of sexual transmission. Bull Math Biol 80(11):3038–3067
Schuler-Faccini L (2016) Possible association between Zika virus infection and microcephaly-Brazil, 2015. Morb Mort Wkly Rep 65:59–62
Shah NH, Patel ZA, Yeolekar BM (2017) Preventions and controls on congenital transmissions of Zika: mathematical analysis. Appl Math 8(04):500
Shan C, Zhu H (2014) Bifurcations and complex dynamics of an SIR model with the impact of the number of hospital beds. J Differ Equ 257(5):1662–1688
Shuai Z, Van den Driessche P (2013) Global stability of infectious disease models using Lyapunov functions. SIAM J App Math 73(4):1513–1532
Tang B, Xiao Y, Wu J (2016) Implication of vaccination against dengue for Zika outbreak. Sci Rep 6:35623
Van den Driessche P, Watmough J (2002) Reproduction numbers and sub-threshold endemic equilibria for compartmental models of disease transmission. Math Biosci 180(1):29–48
Wang W (2006) Backward bifurcation of an epidemic model with treatment. Math Biosci 201(1):58–71
Wang W, Ruan S (2004) Bifurcations in an epidemic model with constant removal rate of the infectives. J Math Anal Appl 291(2):775–793
Wang L, Zhao H (2019) Dynamics analysis of a Zika-dengue co-infection model with dengue vaccine and antibody-dependent enhancement. Phys A Stat Mech Appl 522:248–273
Wang L, Zhao H, Oliva SM, Zhu H (2017) Modeling the transmission and control of Zika in Brazil. Sci Rep 7(1):7721
Wang A, Xiao Y, Zhu H (2018) Dynamics of a Filippov epidemic model with limited hospital beds. Math Biosci Eng 15(3):739–764
Wiratsudakul A, Suparit P, Modchang C (2018) Dynamics of Zika virus outbreaks: an overview of mathematical modeling approaches. PeerJ 6:e4526
World Health Organization (2005–2017) World health statistics
World Health Organization (2016) Essential medicines and health products. Annual Report
World Health Organization (WHO) (2016) WHO statement on the first meeting of the International Health Regulations (2005) Emergency Committee on Zika virus and observed increase in neurological disorders and neonatal malformations
World Health Organization, Case definitions of Zika virus. http://www.paho.org/hq/index. php?option=com_content&view=article& id=11117
Zhang Q et al (2017) Spread of Zika virus in the Americas. Proc Natl Acad Sci 114(22):E4334–E4343
Zmurko J et al (2016) The viral polymerase inhibitor 7-deaza-2\(^{\prime }\)-C-methyladenosine is a potent inhibitor of in vitro Zika virus replication and delays disease progression in a robust mouse infection model. PLoS Negl Trop Dis 10(5):e0004695
Acknowledgements
We are very grateful to anonymous referees and editor for careful reading and helpful suggestions which led to an improvement of our original manuscript. The work is partially supported by the National Natural Science Foundation of China (Nos. 11571170, 11971013) and funding of Jiangsu Innovation Program for Graduate Education KYZZ16\(\_\)0162 and CIHR and NSERC of Canada.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
: Proof of Theorem 1
Proof
Consider the Lyapunov function
in \(\varGamma \). if \(R_{0}^{*}<1\), then \(R _\mathrm{hhw}<1\). One has \(V_\mathrm{w}\ge 0\), and \(V_\mathrm{w}=0\) if only if \(S_\mathrm{h}=S_\mathrm{hw}^0,I_\mathrm{h}=0,I_\mathrm{v}=0.\) So, \(V_\mathrm{w}\) is a positive definite function. The orbital derivative of \(V_\mathrm{w}\) along the solution of system (5) can be written as
If \(R_{0}^{*}<1\), then \(\frac{\hbox {d}V_\mathrm{w}}{\hbox {d}t}\big |_{(5)}\le 0\). So, \(E_\mathrm{0w}\) is stable. It is easy to see that \(E_\mathrm{0w}\) is the largest positively invariant set contained in \(\frac{\hbox {d}V_\mathrm{w}}{\hbox {d}t}\big |_{(5)}=0\). Thus, from the LaSalle theorem, \(E_\mathrm{0w}\) is globally attractive. Thus, \(E_\mathrm{0w}\) is globally stable if \(R_{0}^{*}<1\). \(\square \)
: Proof of Theorem 2
Proof
If \(R_{0}^{*}>1\), then system (5) has a unique endemic equilibrium \(E_\mathrm{w}^{*}\). Let
Differentiate \(V_{i}\) along the solution of system (5). One has
Here, \(l_{21}=l_{32}=\frac{a\beta _{1}I_\mathrm{vw}^*S_\mathrm{hw}^*}{N_\mathrm{h}}\), \(l_{34}=l_{43}=\frac{ \beta _{3}I_\mathrm{hw}^*S_\mathrm{hw}^*}{N_\mathrm{h}}\), \(l_{13}=\frac{a\beta _{2}N_\mathrm{v}}{N_\mathrm{h}}I_\mathrm{hw}^{*}\), \(G_{21}=\frac{I_\mathrm{v}}{I_\mathrm{vw}^{*}}-\ln \left( \frac{I_\mathrm{v}}{I_\mathrm{vw}^{*}}\right) -\frac{I_\mathrm{v}S_\mathrm{h}}{I_\mathrm{vw}^{*}S_\mathrm{hw}^{*}}+\ln \left( \frac{I_\mathrm{v}S_\mathrm{h}}{I_\mathrm{vw}^{*}S_\mathrm{hw}^{*}}\right) ,\)\(G_{43}=\frac{I_\mathrm{h}}{I_\mathrm{hw}^{*}} -\ln \left( \frac{I_\mathrm{h}}{I_\mathrm{hw}^{*}}\right) -\frac{I_\mathrm{h}S_\mathrm{h}}{I_\mathrm{hw}^{*}S_\mathrm{hw}^{*}}+\ln \left( \frac{I_\mathrm{h}S_\mathrm{h}}{I_\mathrm{hw}^{*}S_\mathrm{hw}^{*}}\right) ,\)\(G_{32}=\frac{I_\mathrm{v}S_\mathrm{h}}{I_\mathrm{vw}^{*}S_\mathrm{hw}^{*}}-\ln \left( \frac{I_\mathrm{v}S_\mathrm{h}}{I_\mathrm{vw}^{*}S_\mathrm{hw}^{*}}\right) -\frac{I_\mathrm{h}}{I_\mathrm{hw}^{*}} +\ln \left( \frac{I_\mathrm{h}}{I_\mathrm{hw}^{*}}\right) \), \(G_{34}= \frac{I_\mathrm{h}S_\mathrm{h}}{I_\mathrm{hw}^{*}S_\mathrm{hw}^{*}}-\ln \left( \frac{I_\mathrm{h}S_\mathrm{h}}{I_\mathrm{hw}^{*}S_\mathrm{hw}^{*}}\right) -\frac{I_\mathrm{h}}{I_\mathrm{hw}^{*}} +\ln \left( \frac{I_\mathrm{h}}{I_\mathrm{hw}^{*}}\right) \), \(G_{13}=\frac{I_\mathrm{h}}{I_\mathrm{hw}^{*}} -\ln \left( \frac{I_\mathrm{h}}{I_\mathrm{hw}^{*}}\right) -\frac{I_\mathrm{v}}{I_\mathrm{vw}^{*}}+\ln \left( \frac{I_\mathrm{v}}{I_\mathrm{vw}^{*}}\right) .\)
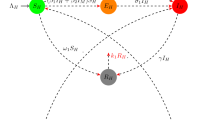
Now, denote a weight matrix \(M=(a_{ij})_{4\times 4}\) and the corresponding weighted digraph \(({\mathcal {G}}, M)\) is shown in Fig. 14. Denote \(s({\mathcal {C}})\) be the arc set of \({\mathcal {C}}\). Then, for each cycle \({\mathcal {C}}\), one has \(\sum \nolimits _{(i,j)\in s({\mathcal {C}})}G_{ij}=0\). Thus, from Theorem 3.5 in Shuai and Van den Driessche (2013), there exist \({\bar{c}}_{i}\ge 0,~i=1,2,\ldots ,4,\) such that \(V=\mathop \sum \nolimits _{i=1}^{4}{\bar{c}}_{i}V_{i}\) is a Lyapunov function of system (5) and \(\frac{\hbox {d}V}{\hbox {d}t}\big |_{(5)}\le 0\). Using the same step in Wang and Zhao (2019), \(V=\mathop \sum \nolimits _{i=1}^{4}{\bar{c}}_{i}V_{i}\) is a positive definite function. So, \(E_\mathrm{w}^* \) is stable. \( E_\mathrm{w}^* \) is the largest positively invariant set contained in \(\frac{\hbox {d}V }{\hbox {d}t}\big |_{(5)}=0\). Thus, from the LaSalle theorem, \(E_\mathrm{w}^*\) is globally attractive. Thus, \(E_\mathrm{w}^*\) is globally stable in the region \(\varGamma \backslash E_\mathrm{0w}\). \(\square \)

The weighted digraph \(({\mathcal {G}}, M)\)
: Discontinuous Bifurcation
Denote \(E_\mathrm{f}^{*}=(S_\mathrm{hf}^{*},I_\mathrm{hf}^{*},I_\mathrm{vf}^{*})\) be any endemic equilibrium of system (4). Assume that (H1), the conditions of (F1), \({\bar{\alpha }}_{1}(I_\mathrm{hf2})>0\), \({\bar{\alpha }}_{2}(I_\mathrm{hf2})>0\) and \(\varDelta (I_\mathrm{hf2})<0\) hold. When \(I_\mathrm{hf}^{*}<b\), \(E_\mathrm{f}^{*}= E_\mathrm{hf0}\) is stable, and when \(I_\mathrm{hf}^{*}>b\), \(E_\mathrm{f}^{*}= E_\mathrm{hf2}\) is unstable. Furthermore, if \(I_\mathrm{hf}^{*}=b\), then there exist a pair of conjugate complex eigenvalues for \(J(E_\mathrm{f}^{*})\). Hence, we expect a limit cycle can bifurcate when \(I_\mathrm{hf}^{*}\) passes through b, which is called discontinuous bifurcation (Leine and Nijmeijer 2004; Clarke et al. 2008; Leine and Van Campen 2006) since system (4) is non-smooth at \(I_\mathrm{hf}^{*}=b\). Note that equilibrium \(E_{b}^{*}=\left( \frac{d_\mathrm{h}N_\mathrm{h}-(\mu _{1}+r+d_\mathrm{h})b}{d_\mathrm{h}},b,\frac{a\beta _{2}N_\mathrm{v}b}{a\beta _{2}b+d_\mathrm{v}N_\mathrm{h}}\right) \) for \(I_\mathrm{hf}^{*}=b\).
Let \(J_{-}(E_{b}^{*})\) and \(J_{+}(E_{b}^{*})\) denote the left and right Jacobian of system (4) at endemic equilibrium \(E_{b}^{*}\), respectively. Then,
where \((S_\mathrm{hf}^{*},~I_\mathrm{hf}^{*},~I_\mathrm{vf}^{*})=E_{b}^{*}\), \(\mu '_{+}(b)=-\frac{\mu _{1}-\mu _{0}}{2(b-{\underline{b}})}\) and \(\mu '_{-}(b)=0.\) It is obvious that \(J_{-}(E_{b}^{*})\ne J_{+}(E_{b}^{*})\) when \(I_\mathrm{hf}^{*}=b.\) Note \(J_{-}\triangleq J_{-}(E_{b}^{*})\) and \(J_{+}\triangleq J_{+}(E_{b}^{*})\). We have real parts of eigenvalues of \(J_{-}\) are all negative, and there exists at least one positive real part eigenvalue of \(J_{+}\). Then, there exists a jump from \(J_{-}\) to \(J_{+}\).
It is difficult to study the stability of equilibrium \(E_{b}^{*}\). Here, we introduce the smooth approximation system and the generalized Jacobian matrix of Clarke (Leine and Nijmeijer 2004; Clarke et al. 2008; Leine and Van Campen 2006). In our study, the smooth approximation system of (4) is as follows:
with \(0\le \epsilon \le 1\), and the generalized Jacobian matrix of Clarke at \(E_{b}^{*}\) is
Obviously, \(E_{b}^{*}\) is endemic equilibrium of system (39). Let \(J(\epsilon )=\epsilon J_{-}+(1-\epsilon )J_{+}\). Then, \(J(\epsilon )\) is Jacobian matrix at \(E_{b}^{*}\) of system (39). The characteristic equation of \(J(\epsilon )\) is as follows:
where
in which \({\bar{\alpha }}_{i}(b)={\bar{\alpha }}_{i}|_{I_\mathrm{h}=b}, i=1,2,3.\)
When \(\epsilon =0\), the real parts of all roots of Eq. (40) are negative. When \(\epsilon =1\), there exist a negative real root and the real parts of two roots of Eq. (40) which are positive. We know that \(\breve{\alpha }_{3}>0\) always holds which implies 0 is not a root of Eq. (40). Hence, there is a \(0<\epsilon ^{*}<1\) such that Eq. (40) has a pair of purely imaginary roots \(\pm i\omega ^{*}~(\omega >0)\) when \(\epsilon =\epsilon ^{*}\). Therefore, the discontinuous Hopf bifurcation (Leine and Nijmeijer 2004) may occur. Now, we tend to find such \(\epsilon ^{*}\). Substituting \(i\omega ~ (\omega >0)\) into (40) and separating the real and imaginary parts give
Then, \(\breve{\alpha }_{1}\breve{\alpha }_{2}-\breve{\alpha }_{3}=0.\) So, we can get the unique \(\epsilon =\epsilon ^{*}\) and \(\omega =\omega ^{*},\) where
in which
Then, \((\epsilon ^{*},~\omega ^{*})\) is a solution of Eq. (40). It implies that \(\pm i\omega ^{*}\) is a pair of purely imaginary roots of Eq. (40) when \(\epsilon =\epsilon ^{*}\) (Fig. 15). we can obtain the following result.
Theorem 15
Assume that (H1), the conditions of (F1), \({\bar{\alpha }}_{1}(I_\mathrm{hf2})>0\), \({\bar{\alpha }}_{2}(I_\mathrm{hf2})>0\), \(\varDelta (I_\mathrm{hf2})<0\) and \(\frac{-A_{1}+\sqrt{A_{1}^{2}-4A_{1}A_{2}}}{2A_{0}}<1\) hold. Denote \(E_\mathrm{f}^{*}=(S_\mathrm{hf}^{*},~I_\mathrm{hf}^{*},~I_\mathrm{vf}^{*})\) be any endemic equilibrium of system (4). When \(I_\mathrm{hf}^{*}=b\), we have the following:
-
(C1)
The endemic equilibrium \(E_\mathrm{f}^{*}\) of the smooth approximation system (39) of system (4) is stable for all \(0\le \epsilon <\epsilon ^{*}\) and unstable for all \(\epsilon ^{*}<\epsilon \le 1\).
-
(C2)
A discontinuous bifurcation occurs at endemic equilibrium \(E_\mathrm{f}^{*}\) of the smooth approximation system (39) of system (4) as \(\epsilon \) increasingly passes through \(\epsilon ^{*}\). That is, system (39) has a branch of periodic solutions bifurcating from the endemic equilibrium \(E_\mathrm{f}^{*}\).

Sets of eigenvalues of the generalized Jacobian J. It has three paths from \(\epsilon =0\) to \(\epsilon =1\) with \(\epsilon ^{*}=0.4892\) and \(\omega ^{*}=0.01237\). Here, \(d_\mathrm{v}=0.175,\)\(\beta _{1}= 0.10895\), \(\beta _{3}= 0.03 \), \(r=0.07\), \(\mu _{0}= 0.08035\), \(\mu _{1}=0.081,\) and all other parameters values are shown in Table 2 (Color Figure Online)
: Proof of Theorem 13
Proof
The translation \(x=S_\mathrm{h}-S_\mathrm{h}^{*}\), \(y=I_\mathrm{h}-I_\mathrm{h}^{*}\), \(x=I_\mathrm{v}-I_\mathrm{v}^{*}\) brings \(E^{*}\) to the origin. Expanding the right-hand sides of the resulting system in a Taylor series about the origin, we obtain
The generalized eigenvectors corresponding to \(\lambda =0\) of Jacobian matrix \(J_{E^{*}}\) are
which satisfy \(J_{E^{*}}V_{1}=0\) and \(J_{E^{*}}V_{2}=V_{1}\). \(V_{3}=\Big ( -m_{3}-\frac{m_{2}^{2}}{m_{2}-d_\mathrm{h}},m_{1}+m_{2}-m_{3},-\frac{d_\mathrm{v}I_\mathrm{v}^{*}}{I_\mathrm{h}^{*}}\Big )'\) is the eigenvector of \(\lambda =-{\bar{\alpha }}_{1}\). Let
then under the non-singular linear transformation
then, system (43) becomes
in which \(L_{20}=\frac{d_\mathrm{v}I_\mathrm{v}^{*}}{|T|I_\mathrm{h}^{*}}l_{20},\) \(M_{20}=\frac{d_\mathrm{v}I_\mathrm{v}^{*}}{|T|I_\mathrm{h}^{*}}m_{20},\) \(M_{11}=\frac{d_\mathrm{v}I_\mathrm{v}^{*}}{|T|I_\mathrm{h}^{*}}m_{11},\)
We reduce system (46) to a two-dimensional center manifold which corresponds to a pair of simple zero eigenvalues. According to Kuznetsov (1995), there exists a center manifold for system (46) which can be locally be represented as follows
for \(\varepsilon _{1}\) and \(\varepsilon _{2}\) sufficiently small. So, we consider the center manifold
By putting the center manifold (47) into the third equation of (46), and then by equating powers of \(u_{1}^{2}\), \(u_{1}u_{2}\) and \(u_{2}^{2}\) on both sides, we can calculate the coefficients of the center manifold as follows:
System (46) restricted to the center manifold is given by
Using the following transformation
then system (48) is topologically equivalent to the normal form (30). \(\square \)
Rights and permissions
About this article

Cite this article
Zhao, H., Wang, L., Oliva, S.M. et al. Modeling and Dynamics Analysis of Zika Transmission with Limited Medical Resources. Bull Math Biol 82, 99 (2020). https://doi.org/10.1007/s11538-020-00776-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11538-020-00776-1
Keywords
- Zika virus
- Medical resources
- Mosquito-borne and sexual transmission
- Backward bifurcation
- Hopf bifurcation
- Bogdanov–Takens bifurcation