
Abstract
In this paper, we study the emergence of different patterns that are formed on both static and growing domains and their bifurcation structure. One of these is the so-called Turing–Hopf morphogenetic mechanism. The reactive part we consider is of FitzHugh–Nagumo type. The analysis was carried out on a flat square by considering both fixed and growing domain. In both scenarios, sufficient conditions on the parameter values are given for the formation of specific space–time structures or patterns. A series of numerical solutions of the corresponding initial and boundary value problems are obtained, and a comparison between the resulting patterns on the fixed domain and those arising when the domain grows is established. We emphasize the role of growth of the domain in the selection of patterns. The paper ends by listing some open problems in this area.










Similar content being viewed by others


References
Baurmann M, Gross T, Feudel U (2007) Instabilities in spatially extended predator–prey systems: spatio-temporal patterns in the neighborhood of Turing–Hopf bifurcations. J Theor Biol 245(2):220–229. doi:10.1016/j.jtbi.2006.09.036
Bub G, Shrier A, Glass L (2004) Global organization of dynamics in cultured cardiac monolayers. Chaos 14:S14. doi:10.1063/1.1821772
Bub G, Shrier A, Glass L (2005) Global organization of dynamics in oscillatory heterogeneous excitable media. Phys Rev Lett 94(2):028105. doi:10.1103/PhysRevLett.94.028105
Castillo JA, Sánchez-Garduño F, Padilla P. Emergence of patterns on growing torai and spheres (in process)
De Wit A, Dewel G, Borckmans P (1993) Chaotic Turing–Hopf mixed mode. Phys Rev E 48:R4191–R4194
Dilão R, Dilão R (2005) Turing instabilities and patterns near a Hopf bifurcation. arXiv:math-ph/0502047v1
Edelstein-Keshet L (2005) Mathematical models in biology. Classics in Applied Mathematics. SIAM, Philadelphia
Just W, Bose M, Bose S, Engel H, Schöll E (2001) Spatiotemporal dynamics near a supercritical Turing–Hopf bifurcation in a two-dimensional reaction-diffusion system. Phys Rev E 64:026219. doi:10.1103/PhysRevE.64.026219
Kloeden PE, Rasmussen M (2011) Nonautonomous dynamical systems. American Mathematical Society, RI
Leppänen T, Karttunen M, Barrio RA, Kaski K (2004) Spatio-temporal dynamics in a Turing model. In: Proceedings of the fifth international conference on complex systems
Liu RT, Liaw SS, Maini PK (2007) Oscillatory Turing patterns in a simple reaction–diffusion system. J Korean Phys Soc 50(1):234–238
Madzvamuse A, Barreira R (2014) Exhibiting cross-diffusion-induced patterns for reaction–diffusion systems on evolving domains and surfaces. Phys Rev E 90:043307-1–043307-14
Madzvamuse A, Gaffney EA, Maini PK (2010) Stability analysis of non-autonomous reaction–diffusion system: the effects of growing domains. J Math Biol 61:133–164
Madzvamuse A, Ndakwo HS, Barreira R (2016) Stability analysis of reaction–diffusion models on evolving domains: the effects of cross-diffusion. Discrete Contin Dyn Syst Ser A 36(4):2133–2170
Marsden JE, McCracken M (1976) The Hopf bifurcation and its applications. Springer, New York
Meixner M, De Wit A, Bose S, Engel H, Schöll E (1997) Generic spatiotemporal dynamics near codimension-two Turing–Hopf bifurcations. Phys Rev E 55:6690–6697
Murray JD (2003) Mathematical biology II: spatial models and biomedical applications. Springer, New York
Pearson JE (1993) Complex patterns in a simple system. Science 261(5118):189–192
Plaza RG, Sánchez-Garduño F, Padilla P, Barrio RA, Maini PK (2004) The effect of growth and curvature on pattern formation. J Dyn Differ Equ 16(4):1093–1121
Press WH, Teukolsky SA, Vetterling WT, Flannery BP (2007) Numerical recipes. The art of scientific computing. Cambridge University Press, New York, NY
Rasmussen M (2007) Attractivity and bifurcation for nonautonomous dynamical systems. Spinger, New York
Ricard MR (2008) On Turing–Hopf instabilities in reaction–diffusion systems. Biophys Rev Lett 3(1 & 2):257–274
Rodrigues LA, Mistro DC, Petrovskii S (2011) Pattern formation, long-term transients, and the Turing–Hopf bifurcation in a space- and time-discrete predator-prey system. Bull Math Biol 73(8):1812–1840. doi:10.1007/s11538-010-9593-5
Rovinsky A, Menzinger M (1992) Interaction of Turing and Hopf bifurcations in chemical systems. Phys Rev A 46:6315–6322
Topaz CM, Catllá AJ (2010) Forced patterns near a Turing–Hopf bifurcation. Phys Rev E 81:026213
Turing A (1952) The chemical basis of morphogenesis. Philos Trans R Soc Lond Ser B Biol Sci 237(641):37–72
Zhang JF, Li W-T, Yan X-P (2011) Hopf bifurcation and Turing instability in spatial homogeneous and inhomogeneous predator–prey models. Appl Math Comput 218:1883–1893
Acknowledgments
The authors wish to thank the anonymous referees for their detailed revision of the manuscript they did. Their comments and suggestions strongly contributed to improve the contents of this paper. P. Padilla would like to thank the Isaac Newton Institute for Mathematical Sciences for its hospitality during the program “Coupling Geometric PDE’s to cell morphology” supported by EPSRC Grant Number EP/K032208/1.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: The Parameter Spaces in the Not Growth Case
The goal of these two first final appendixes is to present the detailed analysis with the aim of showing the sets where the parameters appearing in the different ODE or PDE systems through this paper, satisfy the appropriate conditions, are not empty. The parameters appearing in our systems are: a, b, c and d. Thus, we are going to investigate the required conditions on different parameter planes in two separate cases: 1. with no growing domain and 2. in the isotropic growing domain case.
Along this appendix, we will assume the conditions \(0<b<1\) and \(\left( -0.6+\frac{a}{b}\right) >0\) fulfill. These are to ensure the existence of a unique positive equilibrium of the kinetic part of our system.
1.1 The Set Where \(0<\bar{u}<1\), with \(0<b<1\) and Conditions for Turing Bifurcation
Just to refresh ourselves, we have that whenever the following conditions
hold, the reaction–diffusion system
exhibits a Turing bifurcation.

Blue shady region where \(0<b<1\) and \(0<\bar{u}<1\) (Color figure online)
Note that, for \(0<b<1\) whenever the parameter c satisfies the inequality \(0<c<c^*\), where
the condition I. holds. The critical value, \(c^*\), of c is well defined whenever \(0<\bar{u}<1\). The explicit form of \(\bar{u}\), which depends on the parameters a and b in a massive way given in (4). We claim that, restricting b as \(0<b<1\), the set of values of a for which \(0<\bar{u}<1\) is a nonempty set. Since the parameters a and b must be positive, we consider the positive quadrant of the plane ab. Then by using: the explicit form of \(\bar{u}\) and the Maple software, the set of the parameters on the plane ab where \(0<\bar{u}<1\) is determined. This is all the set of points situated at the left of the line \(l_2\) appearing in Fig. 11. Note the line \(l_2\) appears in the first quadrant of the cd plane. The justification of this is as follows. Once we select the parameters in such a way the condition I is fulfilled for all \(c\in (0,c^*)\), no matter which value of d is. Hence, for each \(c\in (0,c^*)\) in such a plane, we have a vertical straight line.
Now, let see the condition II. Since the set of parameters for which \(0<\bar{u}^2<1\) with \(0<b<1\) is a nonempty set, it is straightforward the verify \(0<(1-b)<\left[ 1-b\left( 1-\bar{u}^2\right) \right] \).
For the condition III, given we require \(d>1\), for fixed \(b\in (0,1)\) we can select \(\bar{u}\in (0,1)\) in such a way, varying c that condition holds. In fact, it is enough to choose \(d>1\) such that
Actually, in the first quadrant of the cd plane the right-hand side of the previous inequality (for \(0<b<1\)) it represents the positive branch of a hyperbola with asymptotic behavior toward the coordinate axis. Therefore, for all the points (c, d)—with \(d>1\)—above such a hyperbola, the condition III, is satisfied.
Once we put in geometrical terms the conditions I–III for the occurrence of the Turing bifurcation, let us see the fourth condition
In order to define the boundary of the region where the previous conditions holds, let see where the equality
is satisfied. Hence, d takes the following values
Therefore, in addition to being \(d>1\) whenever d belongs the complement of the interval
the condition IV fulfills. Thus, by choosing \(b\in (0,1)\) and \(0<\bar{u}<1\) as previously we showed, and with the aim of having a geometrical image of the conditions, we note that the extreme values, \(d_1\) and \(d_2\), of the above interval define—for \(c\ne 0\)—two symmetrical hyperbolas in the cd plane. Given \(c>0\), only one of these is of interest. Therefore, all the couples (c, d) of the plane cd with \(d>1\) and allocated above the mentioned hyperbola satisfy the condition IV.

On the shady region all the conditions for triggering the Turing morphogenetic mechanism in the reaction–diffusion system (65) are satisfied
Once we have determined the set of parameters where each single condition holds for the occurrence of the Turing bifurcation, we now proceed to put all of them together. We do it in the cd plane by taking into account that in addition to the previous conditions, c and d are restricted as follows: \(c>0\) and \(d>1\). Therefore, by choosing the parameters values in the shady region appearing in Fig. 12, we guarantee the Turing bifurcation occurs.
1.2 Conditions for the Hopf Bifurcation
Here we are going to determine the conditions for the emergence of a limit cycle in the kinetic part of the system (3) by means of a Hopf bifurcation. Just remind, the characteristic polynomial of the Jacobian matrix at the equilibrium \((\bar{u},\bar{v})\) is
whose roots are
First, we require \(\lambda _1\) and \(\lambda _2\) must be complex, i.e., they should have the form
with \(\beta (c)\ne 0\). This happens whenever the inequality
holds. In the plane cd, for fixed b and \(\bar{u}\) the above inequality represents the blue region shown in Fig. 13.

Region where the conditions to obtain a Hopf bifurcation are fulfilled
In addition, we require the existence of a critical value, \(c^*,\) of c such that the real part, \(\alpha \), of \(\lambda _1\) and \(\lambda _2\) vanishes, i.e., \(\alpha (c^*)=0\). This critical value is given by
Note \(c^*\) is defined whenever we are able of choosing the parameter values such that \(0<\bar{u}<1\). In fact, this is feasible as it was already shown in previous section. See Fig. 11. Therefore, \(c^*\) is the bifurcation value of c for which the real part of the eigenvalues changes of sign.
On the other side, one of the conditions at the very beginning of this appendix implies \(b<\frac{a}{0.6}=\frac{5}{3}a\) which, in the ab plane (Fig. 11) it corresponds to the region situated at the right of the straight line \(l_1\); meanwhile, in the same ab plane, from the explicit form of \(\bar{u}\), taking into account \(0<\bar{u}<1\), the region where this happens is that at the left of the line \(l_2.\) Therefore, the intersection where this and the previous condition hold is that blue shady region in Fig. 11.
In the main part of this paper, we carried out the needed additional analysis in order to see the stability of the limit cycle which, according to the Hopf bifurcation theorem, emerges.
1.3 For the Turing–Hopf Bifurcation
In order to determine the region where both Turing and Hopf bifurcations coexist, we find the intersection of the shaded regions in Figs. 12 and 13. From this, we obtain the region shown in Fig. 12.
Appendix 2: The Parameter Spaces in the Growing Case
Here, in order to determinate the set of parameters where the different bifurcations occur, we are going to proceed in a similar fashion as we did it in the previous appendix. The new ingredient here is the inclusion of the isotropic growth of the domain, by means of an exponential growth function.
1.1 For the Turing Bifurcation
Proceeding in a similar way as we did in the case with no growth, we determine the regions where the system exhibits a Turing bifurcation. The FitzHugh–Nagumo equations with exponential isotropic growth become:
The conditions for the existence of a Turing bifurcation with \(h_*=2k\) are
which for the system we consider are
By condition (75)
which in Fig. 14 is represented by the region between the d axis and the line \(l_1.\) Also for the region \(c<-c^*,\) which is not of biological interest.
From the condition (76) we obtain c must satisfy
From condition (77)
which determines the region to the right of the hyperbola \(l_2.\)
Now, from condition (77), we have the following regions: a) between the d axis and the line \(l_{3a};\) b), lying to the right of \(l_{3b}.\)
Therefore, the region where we have a Turing bifurcation is represented by the blue shaded region in Fig. 14.

Region where are fulfilled all conditions to obtain a Turing bifurcation
1.2 For the Hopf Bifurcation
We now determine the region in parameter space where the conditions for a Hopf bifurcation are met. Given that the characteristic polynomial associated with the Jacobian matrix of the linearized system is
Here we introduce the following notation
we have that the eigenvalues are
Thus, in order \(\lambda _1\) and \(\lambda _2\) being of the form \(\lambda _1, \lambda _2=\frac{\alpha }{2}\pm i\frac{\beta }{2},\) we need
which determines the shaded region in blue in Fig. 15.

Region where are fulfilled all conditions to obtain a Hopf bifurcation
Additionally, we require the existence of a critical value \(c^*,\) de c, where \(\alpha (c^*)=0\) and \(\beta (c^*)\ne 0.\) Such critical value is given by the expression
If \(c^*\in \mathbb {R},\) we require that the following conditions must be satisfied
Notice that the last one is automatically fulfilled provided \(\bar{u}^2<1.\) We fix c, say \(c=0.68.\) Then we have the constraints (32). In Fig. 16, from condition \(0<-0.6+\frac{a}{b+2kc}\) it follows that \(b<-\frac{a}{-0.6}-2kc\) corresponding to the region to the right of the curve \(l_1.\)
Condition \(\frac{2k}{c}-1+\frac{1}{b+2kc}>0,\) that is, \(b<\frac{c}{c-2k}-2kc,\) determines the region between the a axis and below the line \(l_2.\)
From definition \(\bar{u},\) (33) and in order that \(0<\bar{u}<1\) we obtain the region to the left of \(l_3.\)
Therefore, the region where all conditions are met is the intersection of these three areas and is shown in blue.

Region where are fulfilled all conditions: \(0<\bar{u}<1\) and the conditions (32)
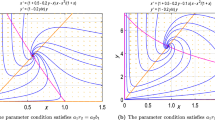
1.3 For the Turing–Hopf Bifurcation
In order to determine the region where both bifurcations coexist, we consider the intersection of the shaded regions in blue in Figs. 14 and 15. This produces Fig. 14, representing the region where there is a Turing–Hopf bifurcation.
Appendix 3: Numerical Solution for the Discretized Laplace–Beltrami
The title of this appendix tells us its actual contents. Note this was used for deriving the CFL criterion for the numerical convergence.
For this, firstly we observe that the forward Euler method gives us the following approximation
We recall that the discretization of the two-dimensional Laplacian operator via central finite differences is given by
Thus, by using the previous approximations the first two terms of the first partial differential equation in (22)
can be discretized as follows
where \(\Delta t, \Delta \zeta \) and \(\Delta \eta \) are the time step, the \(\zeta \) step and the \(\eta \) step, respectively. We must observe that by (21), \(h_1 = h_1(\zeta , \eta , j\Delta t)\) and \(h_2 = h_2(\zeta , \eta , j\Delta t).\)
For this discrete version, we propose solution of the form
where \(i=\sqrt{-1}\) and l is the wave number; meanwhile, \(\xi ^{\Delta t}=\xi (l, j\Delta t),\) is the time dependence, this is a complex number that depends on l. The key fact is that the time dependence of a single eigenmode is nothing more than successive integer powers of the complex number \(\xi ^{\Delta t}\); substituting in (83) and grouping appropriately, we obtain
after multiplying both sides of the equality for the inverse of (84) we obtain
which, by using the equalities
can be written as follows
Here, we use the trigonometric identity \(\cos (s)-1=-2\sin ^2(s/2)\) to rewrite the previous equality as
Rights and permissions
About this article

Cite this article
Castillo, J.A., Sánchez-Garduño, F. & Padilla, P. A Turing–Hopf Bifurcation Scenario for Pattern Formation on Growing Domains. Bull Math Biol 78, 1410–1449 (2016). https://doi.org/10.1007/s11538-016-0189-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11538-016-0189-6