
Abstract
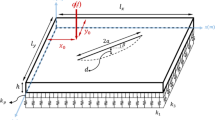
The four modes of vibration of an isotropic rectangular plate with an inclined crack are investigated. It is assumed that the crack remains continuous and its center is located at the center of the plate. The governing nonlinear equation of the transverse vibration of the plate with the plate boundary conditions being simply-supported on all edges is developed. The multiple scale perturbation method is utilized as the solution procedure to find the steady-state frequency response equations for all the four modes of vibration. The equations for the free and forced vibrations are derived and their frequency responses are presented. A special case of large-scale excitation force has also been considered. The parameter sensitivity analysis for the angle of crack, length of crack and the position of the external applied excitation force is performed. It has been shown that according to the aspect ratio of the plate, the vibration modes can have either nonlinear hardening effect or nonlinear softening behavior.











Similar content being viewed by others


References
Bauchau, O., Craig, J.: Kirchhoff plate theory. In: Structural Analysis. pp. 819–914 Springer, Berlin (2009).
Bathe, K.J., Dvorkin, E.N.: A four-node plate bending element based on Mindlin/Reissner plate theory and a mixed interpolation. Int. J. Numer. Methods Eng. 21(2), 367–383 (1985)
Timoshenko, S., Woinowsky-Krieger, S., Woinowsky, S.: Theory of Plates and Shells, vol. 2. McGraw-hill, New York (1959)
Rice, J., Levy, N.: The part-through surface crack in an elastic plate. J. Appl. Mech. 39, 185 (1972)
Khadem, S., Rezaee, M.: An analytical approach for obtaining the location and depth of an all-over part-through crack on externally in-plane loaded rectangular plate using vibration analysis. J. Sound Vib. 230(2), 291–308 (2000)
Israr, A., Cartmell, M.P., Manoach, E., Trendafilova, I., Ostachowicz, W., Krawczuk, M., Zak, A.: Analytical modelling and vibration analysis of cracked rectangular plates with different loading and boundary conditions. J. Appl. Mech. 76(1), 11005–11013 (2009)
Hosseini-Hashemia, Sh, Heydar Roohi, Gh, Hossein Rokni, D.T.: Exact free vibration study of rectangular Mindlin plates with all-over part-through open cracks. Comput. Struct. 88(17), 1015–1032 (2010)
Gandhi, K.R.: Analysis of an inclined crack centrally placed in an orthotropic rectangular plate. J. Strain Anal. Eng. Des. 7(3), 157–162 (1972)
Huang, C., Leissa, A., Li, R.: Accurate vibration analysis of thick, cracked rectangular plates. J. Sound Vib. 330(9), 2079–2093 (2011)
Ismail, R., Cartmell, M.: An investigation into the vibration analysis of a plate with a surface crack of variable angular orientation. J. Sound Vib. 331(12), 2929–2948 (2012)
Yu, S.: Free flexural vibration of rectangular plates having single cracks. In: Proceedings of the 23rd International Congress of Aeronautical Sciences (ICAS), pp. 421–428 (2002).
Liew, K., Hung, K., Lim, M.: A solution method for analysis of cracked plates under vibration. Eng. Fract. Mech. 48(3), 393–404 (1994)
Stahl, B., Keer, L.: Vibration and stability of cracked rectangular plates. Int. J. Solids Struct. 8(1), 69–91 (1972)
Krawczuk, M., Ostachowicz, W.M.: A finite plate element for dynamic analysis of a cracked plate. Comput. Methods Appl. Mech. Eng. 115(1), 67–78 (1994)
Krawczuk, M.: Natural vibrations of rectangular plates with a through crack. Arch. Appl. Mech. 63(7), 491–504 (1993)
Bose, T., Mohanty, A.: Vibration analysis of a rectangular thin isotropic plate with a part-through surface crack of arbitrary orientation and position. J. Sound Vib. 332(26), 7123–7141 (2013)
Ismail, R.: Vibration Analysis of a Plate with an Arbitrarily Orientated Surface Crack. University of Glasgow, Glasgow (2013)
Lu, Y., Xu, Y.: Line-spring model for a surface crack loaded antisymmetrically. National University of Defense Technology Technical Paper (1986).
Joseph, P., Erdogan, F.: Surface crack in a plate under antisymmetric loading conditions. Int. J. Solids Struct. 27(6), 725–750 (1991)
Zhao-Jing, Z., Shu-Ho, D.: Stress intensity factors for an inclined surface crack under biaxial stress state. Eng. Fract. Mech. 47(2), 281–289 (1994)
Ansari, M., Esmailzadeh, E., Younesian, D.: Frequency analysis of finite beams on nonlinear Kelvin-Voight foundation under moving loads. J. Sound Vib. 330(7), 1455–1471 (2011)
Younesian, D., Marjani, S., Esmailzadeh, E.: Nonlinear vibration analysis of harmonically excited cracked beams on viscoelastic foundations. Nonlinear Dyn. 71(1–2), 109–120 (2013)
Ansari, M., Esmailzadeh, E., Younesian, D.: Internal-external resonance of beams on non-linear viscoelastic foundation traversed by moving load. Nonlinear Dyn. 61(1–2), 163–182 (2010)
Leung, A., Mao, S.: A symplectic Galerkin method for non-linear vibration of beams and plates. J. Sound Vib. 183(3), 475–491 (1995)
Fan, Z.: Transient vibration and sound radiation of a rectangular plate with viscoelastic boundary supports. Int. J. Numer. Methods Eng. 51(5), 619–630 (2001)
Nayfeh, A.H.: Introduction to Perturbation Techniques. Wiley-VCH, Brikach (2004)
Nayfeh, A.H., Mook, D.T.: Nonlinear Oscillations. Wiley-VCH, Birkach (2004)
Kevorkian, J., Cole, J.D.: Perturbation Methods in Applied Mathematics. Springer, Berlin (1981)
Murdock, J.A.: Perturbations: Theory and Methods, vol. 27. SIAM, Philadelphia (1999)
Cartmell, M., Ziegler, S., Khanin, R., Forehand, D.: Multiple scales analyses of the dynamics of weakly nonlinear mechanical systems. Appl. Mech. Rev. 56(5), 455–492 (2003)
Acknowledgments
The financial support provided by the Natural Science and Engineering Research Council (NSERC) of Canada to complete this research is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendices
1.1 Appendix 1
Common coefficient expressions:
Coefficients of the first mode of vibration:
Second mode coefficients:
Coefficients of the third mode of vibration:
Fourth mode coefficients:
1.2 Appendix 2
The procedure of deriving Eq. (15)–(18) from Eq. (1) has been presented here. In the first step, by substituting Eqs. (3), (4), (8) and (9) into Eq. (1) one will find:
Then by substituting Eqs. (5), (6), (7) and (10) into Eq. (94) leads into:
Based on the Galerkin’s method, the general form of the transverse deflection of the plate from Eq. (11) has been substituted into Eq. (95):
In this Appendix the derivation of the equation of the vibration for first mode has been described in detail. The same procedure has been employed to derive the equation of the vibration for other three modes. To derived Eq. (15), the modal functions of the first mode have to be substituted in to Eq. (96). These modal functions based on the Eqs. (12) and (13) would be:
By substituting Eqs. (97) and (98) into Eq. (96) and multiply by \(X_{1}Y_{1}\) and taking integral over the plate surface, one can obtain:
In the final step, by factorizing terms and cancelling \(\frac{l_1 l_2 }{4}A_{11} \pi ^{2}\) from Eq. (99) one finds:
The coefficients of Eq. (100) have been listed in Appendix I.
Rights and permissions
About this article

Cite this article
Diba, F., Esmailzadeh, E. & Younesian, D. Nonlinear vibration analysis of isotropic plate with inclined part-through surface crack. Nonlinear Dyn 78, 2377–2397 (2014). https://doi.org/10.1007/s11071-014-1595-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-014-1595-7