
Abstract
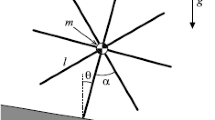
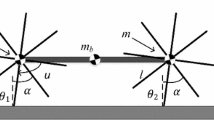
This paper proposes a novel gait generation method for surely achieving constraint on impact posture in limit cycle walking. First, we introduce an underactuated rimless wheel model without ankle-joint actuation and formulate a state-space realization of the control output using the stance-leg angle as a time parameter through an input–output linearization. Second, we determine a control input that moves the control output to a terminal value at a target stance-leg angle during the single-support phase. Third, we conduct numerical simulations to observe the fundamental gait properties and discuss the relationship between the gait symmetry and mechanical energy restoration. Furthermore, we mathematically prove the asymptotic stability of the generated walking gait by analytically deriving the restored mechanical energy.











Similar content being viewed by others

References
McGeer, T.: Passive dynamic walking. Int. J. Robot. Res. 9(2), 62–82 (1990)
McGeer, T.: Passive walking with knees. In: Proc. of the IEEE Int. Conf. on Robotics and Automation, vol. 3, pp. 1640–1645 (1990)
Coleman, M., Chatterjee, A., Ruina, A.: Motions of a rimless spoked wheel: a simple three-dimensional system with impacts. Dyn. Stab. Syst. 12(3), 139–159 (1997)
Westervelt, E.R., Grizzle, J.W., Chevallereau, C., Choi, J.H., Morris, B.: Feedback Control of Dynamic Bipedal Robot Locomotion. CRC Press, Boca Raton (2007)
Morita, S., Ohtsuka, T.: Gait generation method for a compass type walking machine using dynamical symmetry. In: Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2825–2830 (2004)
Hyon, S.-H., Emura, T.: Symmetric walking control: Invariance and global stability. In: Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 1443–1450 (2005)
Asano, F., Luo, Z.-W.: Efficiency and symmetry of ballistic gait. In: Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2928–2933 (2008)
Asano, F.: Stability analysis method independent of numerical integration for limit cycle walking with constraint on impact posture. In: Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 4647–4652 (2014)
Asano, F.: Fully analytical solution to discrete behavior of hybrid zero dynamics in limit cycle walking with constraint on impact posture. Multibody Syst. Dyn. 35(2), 191–213 (2015)
Vukobratović, M., Stepanenko, J.: On the stability of anthropomorphic systems. Math. Biosci. 15, 1–37 (1972)
Li, P.Y., Horowitz, R.: Passive velocity field control (PVFC): part I—Geometry and robustness. IEEE Trans. Autom. Control 46(9), 1346–1359 (2001)
Li, P.Y., Horowitz, R.: Passive velocity field control (PVFC): part II—Application to contour following. IEEE Trans. Autom. Control 46(9), 1360–1371 (2001)
Acknowledgements
This research was partially supported by a Grant-in-Aid for Scientific Research, (C) No. 24560542, provided by the Japan Society for the Promotion of Science (JSPS).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Asano, F. A novel gait generation method independent of target settling-time adjustment for underactuated limit cycle walking. Multibody Syst Dyn 37, 227–244 (2016). https://doi.org/10.1007/s11044-015-9479-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-015-9479-2