
Abstract
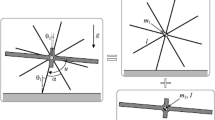
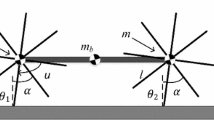
This paper proposes a fully analytical solution to the discrete behavior of hybrid zero dynamics (HZD) in limit cycle walking with constraint on impact posture. First, we introduce a passive rimless wheel and explain the stability principle through derivations of the analytical transition functions of the state error for the stance and collision phases. Second, we consider an active rimless wheel driven by a steady control input for investigating the stability of semi-passive dynamic walking, and propose a method for analytically deriving the transition function for the stance phase without including unknown parameters. We then numerically investigate the solution accuracy and discuss how the discrete behavior of the HZD changes according to the control parameters. Furthermore, we extend the analysis to level walking of an underactuated rimless wheel with a torso and show that the discrete behavior of the HZD can be determined in the same manner.
















Similar content being viewed by others

References
Westervelt, E.R., Grizzle, J.W., Chevallereau, C., Choi, J.H., Morris, B.: Feedback Control of Dynamic Bipedal Robot Locomotion. CRC Press, Boca Raton (2007)
Wisse, M., van der Linde, R.Q.: Delft Pneumatic Bipeds. Springer, Berlin (2007)
McGeer, T.: Passive dynamic walking. Int. J. Robot. Res. 9(2), 62–82 (1990)
McGeer, T.: Passive walking with knees. In: Proc. of the IEEE Int. Conf. on Robotics and Automation, vol. 3, pp. 1640–1645 (1990)
Westervelt, E.R., Grizzle, J.W., Koditschek, D.E.: Hybrid zero dynamics of planar biped walkers. IEEE Trans. Autom. Control 48(1), 42–56 (2003)
Coleman, M.J., Chatterjee, A., Ruina, A.: Motions of a rimless spoked wheel: a simple three-dimensional system with impacts. Dyn. Stab. Syst. 12(3), 139–159 (1997)
Coleman, M.J.: Dynamics and stability of a rimless spoked wheel: a simple 2D system with impacts. Dyn. Syst. 25(2), 215–238 (2010)
Asano, F., Luo, Z.-W.: Asymptotically stable biped gait generation based on stability principle of rimless wheel. Robotica 27(6), 949–958 (2009)
Asano, F.: Efficiency and optimality of two-period limit cycle walking. Adv. Robot. 26(1-2), 155–176 (2012)
Hosoe, S., Takeichi, K., Kumai, S., Ito, M.: Analysis of stability of dynamic biped locomotion with high gain feedback. Trans. Soc. Instrum. Control Eng. 22(9), 948–954 (1986) (in Japanese)
Grizzle, J.W., Abba, G., Plestan, F.: Asymptotically stable walking for biped robots: analysis via systems with impulse effects. IEEE Trans. Autom. Control 46(1), 51–64 (2001)
Asano, F.: Stability analysis of underactuated bipedal gait using linearized model. In: Proc. of the 11th IEEE-RAS Int. Conf. on Humanoid Robots, pp. 282–287 (2011)
Asano, F.: Stability analysis of underactuated compass gait based on linearization of motion. Multibody Syst. Dyn. 33(1), 93–111 (2015)
Asano, F.: High-speed dynamic gait generation for limit cycle walkers based on forward-tilting impact posture. Multibody Syst. Dyn. 30(3), 287–310 (2013)
Asano, F., Xiao, X.: Role of deceleration effect in efficient and fast convergent gait generation. In: Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 5649–5654 (2013)
Asano, F., Xiao, X.: Output deadbeat control approaches to fast convergent gait generation of underactuated spoked walker. In: Proc. of the 2012 IEEE/SICE Int. Symp. on System Integration, pp. 265–270 (2012)
Acknowledgements
This research was partially supported by a Grant-in-Aid for Scientific Research, (C) No. 24560542, provided by the Japan Society for the Promotion of Science (JSPS).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Asano, F. Fully analytical solution to discrete behavior of hybrid zero dynamics in limit cycle walking with constraint on impact posture. Multibody Syst Dyn 35, 191–213 (2015). https://doi.org/10.1007/s11044-014-9445-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-014-9445-4