
Abstract
We propose a boundary value correction approach for cases when curved boundaries are approximated by straight lines (planes) and Lagrange multipliers are used to enforce Dirichlet boundary conditions. The approach allows for optimal order convergence for polynomial order up to 3. We show the relation to a Taylor series expansion approach previously used in the context of Nitsche’s method and, in the case of inf-sup stable multiplier methods, prove a priori error estimates with explicit dependence on the meshsize and distance between the exact and approximate boundary.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In this contribution we develop a modified Lagrange multiplier method based on the idea of boundary value correction originally proposed for standard finite element methods on an approximate domain in [1] and further developed in [2]. More recently boundary value correction have been developed for cut and immersed finite element methods [3,4,5,6,7]. Using the closest point mapping to the exact boundary, or an approximation thereof, the boundary condition on the exact boundary may be weakly enforced using multipliers on the boundary of the approximate domain. Of particular practical importance in this context is the fact that we may use a piecewise linear approximation of the boundary, which is very convenient from a computational point of view since the geometric computations are simple in this case and a piecewise linear distance function may be used to construct the discrete domain.
We first compare the formulation with the one using Nitsche’s method introduced for cut finite element methods in [3] and show how this can be interpreted as an augmented Lagrangian formulation of the multiplier method, where the multiplier has been eliminated in the spirit of [8].
We then prove a priori error estimates in the energy and \(L^2\) norms, in terms of the error in the boundary approximation and the meshsize. We obtain optimal order convergence for polynomial approximation up to order 3 of the solution.
Note that without boundary correction one typically requires \(O(h^{p+1})\) accuracy in the \(L^\infty \) norm for the approximation of the domain, which leads to significantly more involved computations on the cut elements for higher order elements, see [9]. We present numerical results illustrating our theoretical findings.
The outline of the paper is as follows: In Sect. 2 we formulate the model problem and our method, in Sect. 3 we present our theoretical analysis, in Sect. 4 we discuss the choice of finite element spaces in cut finite element methods, in Sect. 5 we present the numerical results, and finally in Sect. 6 we include some concluding remarks.
2 Model problem and method
2.1 The domain
Let \(\varOmega \) be a domain in \(\mathbb {R}^d\) with smooth boundary \(\partial \varOmega \) and exterior unit normal \(\varvec{n}\). We let \(\varrho \) be the signed distance function, negative on the inside and positive on the outside, to \(\partial \varOmega \) and we let \(U_\delta (\partial \varOmega )\) be the tubular neighborhood \(\{\varvec{x}\in \mathbb {R}^d : |\varrho (\varvec{x})| < \delta \}\) of \(\partial \varOmega \). Then there is a constant \(\delta _0>0\) such that the closest point mapping \(\varvec{p}(\varvec{x}):U_{\delta _0}(\partial \varOmega ) \rightarrow \partial \varOmega \) is well defined and we have the identity \(\varvec{p}(\varvec{x}) = \varvec{x}- \varrho (\varvec{x})\varvec{n}(\varvec{p}(\varvec{x}))\). We assume that \(\delta _0\) is chosen small enough that \(\varvec{p}(\varvec{x})\) is well defined. See [10, Sect. 14.6], for further details on distance functions.
2.2 The model problem
We consider the problem: find \(u:\varOmega \rightarrow \mathbb {R}\) such that
where \(f\in H^{-1}(\varOmega )\) and \(g\in H^{1/2}(\partial \varOmega )\) are given data. It follows from the Lax–Milgram lemma that there exists a unique solution to this problem and we also have the elliptic regularity estimate
Here and below we use the notation \(\lesssim \) to denote less or equal up to a constant.
Using a Lagrange multiplier to enforce the boundary condition we can write the weak form of (2.4)–(2.5) as: find \((u,\lambda ) \in H^1(\varOmega ) \times H^{-1/2}(\partial \varOmega )\) such that
2.3 The mesh and the discrete domain
Let \(\{\mathcal {K}_{h}\}, h \in (0,h_0]\), be a family of quasiuniform partitions, with mesh parameter h, consisting of shape regular triangles or tetrahedra K, with diameter \(h_K\), \(h=\max _{K \in \mathcal {K}_h} h_K\) and \(h_{min} = \min _{K \in \mathcal {K}_h} h_K\). The partitions induce discrete polygonal approximations \(\varOmega _h = \cup _{K \in \mathcal {K}_h}K\), \(h \in (0,h_0]\), of \(\varOmega \). We assume neither \(\varOmega _h \subset \varOmega \) nor \(\varOmega \subset \varOmega _h\), instead the accuracy with which \(\varOmega _h\) approximates \(\varOmega \) will be crucial. For each \(\mathcal {K}_h\), \(\partial \varOmega _h\) is given by the trace mesh consisting of the set of faces in the elements \(K \in \mathcal {K}_h\) that belong to only one element. To each \( \varOmega _h\) is associated a discrete unit normal \(\varvec{n}_h\) and a discrete signed distance \(\varrho _h:\partial \varOmega _h \rightarrow \mathbb {R}\), such that if \(\varvec{p}_h(\varvec{x},\varsigma ):=\varvec{x}+ \varsigma \varvec{n}_h(\varvec{x})\) then \(\varvec{p}_h(\varvec{x},\varrho _h(\varvec{x})) \in \partial \varOmega \) for all \(\varvec{x}\in \partial \varOmega _h\). We will also assume that \(\varvec{p}_h(\varvec{x},\varsigma ) \in U_{\delta _0}(\varOmega ):=U_{\delta _0}(\partial \varOmega )\cup \varOmega \) for all \(\varvec{x}\in \partial \varOmega _h\) and all \(\varsigma \) between 0 and \(\varrho _h(\varvec{x})\). For conciseness we will drop the second argument of \(\varvec{p}_h\) below whenever it takes the value \(\varrho _h(\varvec{x})\), and thus we have the map \(\partial \varOmega _h \ni \varvec{x}\mapsto \varvec{p}_h(\varvec{x}) \in \partial \varOmega \). We make the following assumptions
where \(O(\cdot )\) denotes the big ordo. We also assume that \(h_0\) is small enough to guarantee that
and that there exists \(M>0\) such for any \(\varvec{y}\in U_{\delta _0}(\partial \varOmega )\) the equation, find \(\varvec{x}\in \partial \varOmega _h\) and \( |\varsigma | \le \delta _h\) such that
has a solution set \(\mathcal {P}_h\) with
uniformly in h. The rationale of this assumption is to ensure that the image of \(\varvec{p}_h\) can not degenerate for vanishing h; for more information cf. [3].
We note that it follows from (2.6) that
since \(|\varrho _h(\varvec{x})| \ge |\varrho (\varvec{x})|\), \(\varvec{x}\in \partial \varOmega _h\). For stability we need a bound on how much \(\varOmega _h\) can overshoot \(\varOmega \), more precisely we assume that \(\varrho _h \ge -C_{\partial \varOmega } h_{min}\) for a \(C_{\partial \varOmega }\) small enough that will be determined by the analysis but essentially depends on the constants associated to the stability of the finite element pair used.
Since \(\varOmega _h\) and \(\varOmega \) differ we need to extend the data f and the solution u in a smooth fashion. To this end we recall [11, Sect. 2.3, Theorem 5] the stable extension operator \(E:H^{m}(\varOmega ) \mapsto H^{m}(\mathbb {R}^d)\), \(m\ge 0\) satisfying
We will also denote an extended function by \(v^E:=Ev\).
2.4 The finite element method
2.4.1 Boundary value correction
The basic idea of the boundary value correction of [1] is to use a Taylor series at \(\varvec{x}\in {\partial \varOmega _h}\) in the direction \(\varvec{n}_h\), and let this series represent \(u_h \vert _{\partial \varOmega }\). For and \(\varvec{x}\in \partial \varOmega _h\) we may write
with
Below we will drop the second argument of \(T_2^{\varDelta }\). In the present work we will restrict the discussion to methods using first two terms of the right hand side to approximate \(u\circ \varvec{p}_h(\varvec{x})\),
which are the ones of most practical interest.
Choosing appropriate discrete spaces \(V_h\) and \(\varLambda _h\) for the approximation of u and \(\lambda \), respectively (particular choices are considered in Sect. 5), we thus seek \((u_h,\lambda _h)\in V_h\times \varLambda _h\) such that
where we introduced the notation \(\tilde{g}:= g\circ \varvec{p}_h\) for the pullback of g from \(\partial \varOmega \) to \(\partial \varOmega _h\).
Using Green’s formula we note that the first equation implies that \(\lambda _h = -\varvec{n}_h\cdot \nabla u_h\), and therefore we now propose the following modified method: Find \((u_h,\lambda _h)\in V_h\times \varLambda _h\) such that
or
where \((\cdot ,\cdot )_{M}\) denotes the \(L_2\) scalar product over M, with \(\Vert \cdot \Vert _{M}\) the corresponding \(L_2\) norm, and
Introducing the triple norm
we have, for all \((w,\varsigma ),\,(v,\mu ) \in H^1(\varOmega _h) \times L^2(\partial \varOmega _h)\), using the Cauchy–Schwarz inequality
where we used that \(\delta _h = O(h)\) in the last inequality.
2.5 Relation to Nitsche’s method with boundary value correction
Problem (2.17) can equivalently be formulated as finding the stationary points of the Lagrangian
We now follow [12] and add a consistent penalty term and seek stationary points of the augmented Lagrangian
where \(\gamma > 0\) remains to be chosen. The corresponding optimality system is
Now, formally replacing \(\lambda _h\) by \(-\varvec{n}_h\cdot \nabla u_h\) and \(\mu \) by \(-\varvec{n}_h\cdot \nabla v\) we obtain
Setting now \(\gamma = \gamma _0/h\), with \(\gamma _0\) sufficiently large to ensure coercivity, we obtain the symmetrized version of the boundary value corrected Nitsche method proposed in [1] with optimal convergence up to order \(p=3\). Observe that the form remains positive for large positive \(\rho _h\), but the control of the trace of \(u_h\) degenerates for large \(\rho _h\), so stability depends on \(\rho _h\), but there is no strict bound for large values of \(\rho _h\). This means that \(\partial \varOmega _h\) has to be a reasonably good approximation of \(\partial \varOmega \), or \(\varOmega \) is approximated from the inside. We define this method as: Find \(\tilde{u}_h \in V_h\) such that
for all \(v_h \in V_h\). Here the bilinear form is defined by
In [1, 3] the following error estimate was proved:
Theorem 2.1
Let u be the solution to (2.1)–(2.2) and \(u_h \in V_h\) the solution to (2.24), with \(\gamma \) sufficiently large, then for sufficiently smooth u there holds
here \(\partial \varOmega _t = \{\varvec{x}\in U_{\delta _0}(\partial \varOmega ): \varrho (\varvec{x}) = t\}\) and l is an integer larger than or equal to zero. The hidden constant depends on the parameter \(\gamma \).
As we shall see below, the multiplier method satisfies the same estimate, but is independent of any parameter.
3 Elements of analysis
In this section we will prove some basic results on the stability and the accuracy of the method (2.17). We define the space of piecewise polynomial functions of order less than or equal to l on the trace mesh \(\partial \varOmega _h\) by
We will use \(X^l_{h} \) to define the multiplier space. For the bulk variable we let \(V_h\) be the space of continuous piecewise polynomial functions of order k, enriched with higher order bubbles on the faces in \(\partial \varOmega _h\) so that inf-sup stability holds when combined with the multiplier space \(\varLambda _h:= X^{k-1}_h\). More precisely we assume that there exists constants \(c_0\) and \(c_1\) such that for every \(\eta _h \in \varLambda _h\) there exists \(v_\eta \in V_h\) such that
For details on stable choices of the spaces we refer to [13,14,15].
For the analysis we will make regular use of the following standard trace and inverse inequalities, for all elements \(K \in \mathcal {K}_h\)
We also recall the following bound from [3],
We let \(\pi _h:L^2(\partial \varOmega _h) \rightarrow \varLambda _h\) denote the \(L^2\)-orthogonal projection, which has optimal approximation in the \(L^2\)-norm, and \(i_h:H^2(\varOmega _h) \rightarrow V_h\) the standard Lagrange interpolant. We can then prove the following approximation property
Lemma 3.1
For all \(v \in H^{k+1}(\varOmega )\) there holds, with \(i_h v^E \in V_h\) and \(\pi _h \lambda ^E \in \varLambda _h\),
where \(\lambda ^E := \varvec{n}_h\cdot \nabla u^E\vert _{\partial \varOmega _h}\).
Proof
It is straightforward to show using standard interpolation that the following approximation result is satisfied,
First note that by using the trace inequality (3.2) locally on each F on \(\partial \varOmega _h\)
It follows, using standard interpolation and the stability of the extension, that
Then note that by using standard interpolation locally on each face F on \(\partial \varOmega _h\), (see e.g. [16, Lemma 5.2]),
we have
Using a global trace inequality, \( |u^E|_{H^{k+\frac{1}{2}}(\partial \varOmega _h)} \lesssim \Vert u^E\Vert _{H^{k+1}(\partial \varOmega _h)}\), we see that
We conclude by applying the stability estimate for the extension (2.11). \(\square \)
We will now state an elementary lemma showing that the approximation of the bulk variable using the trace variable is optimal in \(H^1(\varOmega _h)\).
Lemma 3.2
Let \(v_h \in V_h\) and let \(\mu _v = \pi _h(v_h\vert _{\partial \varOmega }) \in \varLambda _h\). Then there holds:
Proof
We recall the bound
for all \(v \in H^1(\partial \varOmega _h)\) and where \(\nabla _\partial \) denotes the gradient along the boundary. Using (3.6) we see that
The result follows by applying the trace inequality, similar to (3.3), \(\Vert \nabla _\partial v_h\Vert _{\partial K} \lesssim H^{-\frac{1}{2}} \Vert \nabla v_h\Vert _K\). \(\square \)
The formulation (2.17) satisfies the following stability result
Proposition 3.1
Assume that for two constants \(C_{\partial \varOmega ^-},\,C_{\partial \varOmega ^+}\),
there holds \(- C_{\partial \varOmega ^-} h_{min} \le \varrho _h \le C_{\partial \varOmega ^+} h\) and that \(V_h \times \varLambda _h\) satisfies the stability condition (3.1). Then for every \((y_h,\eta _h) \in V_h \times \varLambda _h\) there exists \((v_h,\mu _h) \in V_h \times \varLambda _h\) such that
and
Proof
First observe that
Then recall that since the space satisfies the inf-sup condition for \(\eta _h \in \varLambda _h\) there exists \(v_\eta \in V_h\) so that (3.1) holds. Then note that
Using the definition of \(v_\eta \) and the bounds of (3.1) we have the following bounds for the terms I and \({ II}\) of the right hand side
Therefore
where \([\varrho ]_{\pm } = \frac{1}{2} (|\varrho | \pm \varrho )\). It follows that for \(c_\eta = c_0/(2 c_1^2)\), \(C_{\partial \varOmega ^-} \le c^2_0/(8 c_1^2) \),
Observe that \( c_\eta (c_0 - c_\eta c_1^2) - C_{\partial \varOmega ^-} \ge c_0^2/(8 c_1^2)\). Finally let \(\mu _y =\pi _h y_h\) and observe that since \(\varrho _h \lesssim h\),
Where the last inequality follows by applying Lemma 3.2, fixing \(\varepsilon =h/\Vert [\varrho _h]_+\Vert _{L^\infty (\partial \varOmega _h)}\).
The bound (3.7) then follows by taking \(v_h = y_h + c_ \eta v_\eta \) and \(\mu _h = - \eta _h + c_y h^{-1} \mu _y\) with \(c_\eta = c_0/(2 c_1^2)\) and \(c_y = \min ( (4 C^2_t)^{-1}, C_{\partial \varOmega ^+}^{-1}) \) and assuming that \(C_{\partial \varOmega ^-}< C_t c_0/(2 c_1)\). This results in the bound
To conclude the proof we need to show that
By the triangle inequality we have
By definition
and the proof follows from (3.1) together with the stability of \(\pi _h\) in \(L^2\). \(\square \)
Remark 3.1
It follows from Proposition 3.1 that \(C_{\partial \varOmega ^-}\) must respect a bound depending on the stability constants of the finite element pair as defined in (3.1) and the constant of the approximation bound in Lemma 3.2. \(C_{\partial \varOmega ^+}\) however is free, but as it grows the control of \(\Vert h^{-\frac{1}{2}} y_h\Vert _{\partial \varOmega _h}\) degenerates, since \(c_y\) has to be taken smaller than \(C_{\partial \varOmega ^+}^{-1}\).
An immediate consequence of the Proposition 3.1 is the existence of a unique discrete solution to the formulation (2.17). We will now use this stability result to prove an error estimate. First we prove some preliminary lemmas quantifying the consistency error induced by using the approximate domain \(\varOmega _h\) and the first order Taylor expansion.
Lemma 3.3
Let u be the solution to (2.1)–(2.2), and \((u_h,\lambda _h) \in V_h \times \varLambda _h\) the solution to (2.17) then there holds for all \((v_h, \mu _h) \in V_h \times \varLambda _h\),
where \(u^E,\, f^E\) denotes the extension of u, f.
Proof
First observe that by the definition (2.17)
Integrating by parts we then obtain
Using that \(f+\varDelta u = 0\) in \(\varOmega \) we have that
Considering now the boundary term we have
where we used that
\(\square \)
Lemma 3.4
Let u be a sufficiently smooth solution to (2.1)–(2.2), then the following bounds are satisfied
Proof
For the proof of (3.15) we refer to [3]. The proof of (3.16) follows using Cauchy–Schwarz inequality repeatedly
and finally we conclude observing that
\(\square \)
Theorem 3.1
Let \(u \in H^{k+1}(\varOmega )\) denote the solution to (2.4)–(2.5). Let \(u_h, \lambda _h \in V_h \times \varLambda _h\) denote the solution of (2.17). Assume that the polynomial order of \(V_h\) is \(k \in \{1,2,3\}\), with enrichment on the boundary and \(\varLambda _h \equiv X_{h}^{k-1}\). Assume that the hypothesis of Proposition 3.1 are satisfied. Then there holds,
Proof
We consider the discrete errors \(e_h = u_h - v_h\) and \(\varsigma _h = \lambda _h - \zeta _h\) for some \(v_h,\zeta _h \in V_h \times \varLambda _h\). Using the triangle inequality and we have
By choosing \(v_h\) judiciously the first term on the right hand side is bounded by standard interpolation. We therefore only need to consider the second term. By the stability estimate of Proposition 3.1 we have
Using Lemma 3.3 we find that
Applying the continuity of the form A, (2.19) in the first term of the right hand side, the Cauchy–Schwarz inequality followed by the inequality (3.4) in the second and finally an h-weighted Cauchy–Schwarz inequality in the third we obtain the bound
It then follows from equation (3.18) and (3.1) that
To conclude we choose \(v_h = i_h u^E\) and \(\mu _h = \pi _h \lambda ^E\) and apply the bounds of Lemmas 3.1 and 3.4 to obtain
This concludes the proof. \(\square \)
Corollary 3.1
Let \(l=0\) for \(k=1\) and \(l=1\) for \(k=2,3\). Assume that , \(\delta _h \lesssim O(h^{(2k+1)/4})\); then under the same assumptions as Proposition 3.1 and Theorem 3.1 there holds:
where \(\epsilon >0\) when \(l=0\) and \(\epsilon =0\) when \(l=1\).
Proof
First consider the case \(l=0\). Then using a trace inequality followed by the triangle inequality
Using the stability of the extension
Similarly
For \(l=1\) the following bound holds by the same argument
Consider now the powers of h
and
\(\square \)
Remark 3.2
We see that optimal convergence is obtained when \(\delta _h\lesssim h^{(2k+1)/4}\). It follows that, for the case \(k=1\), \(\delta _h =O(h^{3/4})\) is sufficient for optimal accuracy. Such a poor geometry approximation however violates the condition \(\delta _h = O(h)\) necessary for the stability of Proposition 3.1 to hold uniformly.
We now prove an error estimate in the \(L^2\)-norm
Theorem 3.2
Under the same assumptions as for Theorem 3.1, there holds for \(l \ge 0\),
Proof
Let \(\varphi \in H^1_0(\varOmega )\) be the solution to the dual problem
where \(\psi \vert _{\varOmega _h} = u^E - u_h\) and \(\psi \vert _{\varOmega \setminus \varOmega _h} = 0\). By (2.3) there holds \(\Vert \varphi \Vert _{H^2(\varOmega )} \lesssim \Vert u - u_h\Vert _{\varOmega _h\cap \varOmega }\). Now observe that, if \(e = u^E - u_h\) and \(\eta = \lambda ^E - \lambda _h\) then
For the first term on the right hand side we apply the Cauchy–Schwarz inequality and the boundary Poincaré inequality [3]
to obtain
To bound the terms \({ II}\) and \({ III}\) we apply the consistency of Lemma 3.3 with \(v_h = i_h \varphi ^E\) and \(\mu _h =\pi _h \varvec{n}_h\nabla \varphi ^E\), introducing the notation \(\zeta ^E :=-\varvec{n}_h \cdot \nabla \varphi ^E\)
For the first two terms on the right hand side we see that, using Lemma 3.3
Observing that using the arguments to bound the Taylor remainder term,
we conclude that under the assumption \(\delta _h \lesssim h\) there holds
To conclude the proof we bound the two non-conformity errors. First the bulk term resulting from the geometry mismatch,
where we used \(\Vert h^{-\frac{1}{2}} i_h \varphi ^E\Vert _{\partial \varOmega _h}\lesssim \Vert h^{-\frac{1}{2}}( i_h \varphi ^E - \varphi )\Vert _{\partial \varOmega }+h^{-\frac{1}{2}} \delta _h \Vert \varvec{n}_h \cdot \nabla i_h \varphi ^E\Vert _{\partial \varOmega } \lesssim \Vert \varphi \Vert _{H^2(\varOmega )}\).
The Taylor term is bounded using equation (3.16),
where we used that \(\Vert \zeta ^E\Vert _{\partial \varOmega _h} = \Vert {\varvec{n}_h\cdot \nabla } \varphi ^E\Vert _{\partial \varOmega _h} \lesssim \Vert \varphi \Vert _{H^{2}(\varOmega )}\). Collecting the above bounds and using (2.3) we conclude that
This ends the proof. \(\square \)
Corollary 3.2
Under the same assumptions as Theorem 3.2, assume that \(u \in H^{k+1}(\varOmega ) \cap H^{\frac{7}{2}}(\varOmega )\) and \(\delta _h = O(h^{\frac{k+1}{2}})\) then there holds
Proof
Recall from the proof of Corollary 3.1 that
For \(l=1\) the following bound holds by the same argument
It follows from Theorem 3.1 that, with \(l=1\),
We conclude by observing that since \(\delta _h =O(h^{\frac{k+1}{2}})\),
\(\square \)
Remark 3.3
It follows that for piecewise affine approximation the geometry error can be O(h) without loss of convergence if the solution is sufficiently smooth. For quadratic approximation we need \(O(h^{\frac{3}{2}})\) and for cubic we need the best approximation possible with a piecewise affine approximation of the geometry, \(O(h^2)\).

Elevation of the discrete solution on triangles

Errors with and without boundary modification, \(P^2\) case

Errors in the multiplier with and without boundary modification, \(P^2\) case

Errors with and without boundary modification, \(P^3\) case
4 Remarks on cut finite element methods
In the context of cut finite element methods the discontinuous multiplier spaces used above can no longer be expected to be stable. It is possible to stabilise the multiplier using Barbosa-Hughes stabilisation. However, fluctuation based multipliers are unlikely to be suitable in this context since the weak consistency of the fluctuations of the multiplier between elements depends on the geometry approximation through the interface normal. Since the method is of interest when the geometry approximation is of relatively low order, this limits the possibility to use fluctuation based stabilisation.

Errors in the multiplier with and without boundary modification, \(P^3\) case

Error plots for the unstable triangular element example
5 Numerical examples
We show examples of higher order triangular elements with linearly interpolated boundary and low order rectangular elements with staircase boundary, using discontinuous multiplier spaces. In all examples we define the meshsize \(h=1/\sqrt{\text {NNO}}\), where NNO corresponds to the number of nodes of the lowest order FEM on the mesh in question (bilinear or affine).
5.1 Triangular elements
We first consider the case of affine triangulations of a ring \(1/4\le r\le 3/4\), \(r=\sqrt{x^2+y^2}\). We use the manufactured solution \(u=(r-1/4)(3/4-r)\) and compute the corresponding right-hand side analytically. An elevation of the a typical discrete solution is given in Fig. 1.
We use continuous piecewise \(P^k\) polynomials, \(k=2,3\) for the approximation of u, and for the approximation of \(\lambda \) we use piecewise \(P^{k-1}\) polynomials, discontinous on each element edge on \(\partial \varOmega _h\). To ensure inf-sup stability, we add hierarchical \(P^{k+1}\) bubbles on each edge in the approximation of u.
Second order elements In Fig. 2 and Tables 1 and 2 we show the convergence in \(H^1(\varOmega _h)\) and \(L_2(\varOmega _h)\) with and without boundary modification. In Fig. 3 and Table 3 we show the error in multiplier computed as \(\Vert (-\varvec{n}\cdot \nabla u)\vert _{\partial \varOmega _h} - \lambda _h\Vert _{\partial \varOmega _h}\). Optimal order convergence is observed for the modified method, convergence \(O(h^3)\) in \(L_2(\varOmega _h)\) and \(O(h^2)\) in \(H^1(\varOmega _h)\); the multiplier error is approximately \(O(h^2)\).
Third order elements Next we use continuous piecewise third order polynomials for the approximation of u, and for the approximation of \(\lambda \) we use piecewise quadratic polynomials, discontinous on each element edge on \(\partial \varOmega _h\). In Fig. 4 and Tables 4 and 5 we show the convergence in \(H^1(\varOmega _h)\) and \(L_2(\varOmega _h)\) with and without boundary modification. In Fig. 5 and Table 6 we show the error in multiplier computed as above. Optimal order convergence is again observed for the modified method, convergence \(O(h^4)\) in \(L_2(\varOmega _h)\) and \(O(h^3)\) in \(H^1(\varOmega _h)\); the multiplier error is approximately \(O(h^3)\). Note that no improvement over \(P^2\) approximations can be seen in the unmodified method due to the geometry error being dominant.

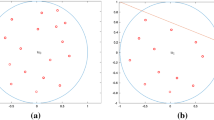
A coarse mesh inside the elliptical domain

Elevation of the discrete solution on rectangles for the unmodified (top) and for the modified (bottom) schemes

Error plots for the rectangular element example
An unstable pairing of spaces We finally make the observation that our modification has a stabilising influence on the approximation. We try continuous \(P^2\) approximations of u and discontinuous \(P^2\) approximations of \(\lambda \). In this case we get no convergence without the modification due to the violation of the inf-sup condition, whereas with modification we obtain the optimal convergence pattern in u and a stable multiplier convergence given in Fig. 6 and Table 7.
5.2 Rectangular elements
This example shows that it is possible to achieve optimal convergence even on a staircase boundary. We use a continuous piecewise \(Q_1\) approximation on the (affine) rectangles, again enhanced for inf-sup, now by hierarchical \(P^2\) bubble function on the boundary edges, together with edgewise constant multipliers on \(\partial \varOmega _h\). We use the manufactured solution \(u=\sin (x^3)\cos (8y^3)\) on the domain inside the ellipse \(x^2/4+y^2=1\). Our computational grids consist of elements completely inside this ellipse; a typical coarse grid is shown if Fig. 7 where we note the staircase boundary. In Fig. 8 we show elevations of the numerical solutions on a finer grid without and with boundary correction. In Fig. 9 and Tables 8 and 9 we show the errors of the unmodified and modified methods. Again we observe optimal order convergence for the modified method, \(O(h^2)\) in \(L_2(\varOmega _h)\) and O(h) in \(H^1(\varOmega _h)\).
6 Concluding remarks
We have introduced a symmetric modification of the Lagrange multiplier approach to satisfying Dirichlet boundary conditions for Poisson’s equation. This novel approach allows for affine approximations of the boundary, and thus affine elements, up to polynomial approximation order 3 without loss of convergence rate as compared to higher order boundary fitted meshes. The modification is easy to implement and only requires that the distance to the exact boundary in the direction of the discrete normal can be easily computed. In fact, the modification stabilises the multiplier method so that unstable pairs of spaces can be used, as long as there is a uniform distance to the boundary.
References
Bramble, J.H., Dupont, T., Thomée, V.: Projection methods for Dirichlet’s problem in approximating polygonal domains with boundary-value corrections. Math. Comput. 26, 869–879 (1972)
Dupont, T.: \({L}_2\) error estimates for projection methods for parabolic equations in approximating domains. In: de Boor, C. (ed.) Mathematical Aspects of Finite Elements in Partial Differential Equations, pp. 313–352. Academic Press, New York (1974)
Burman, E., Hansbo, P., Larson, M.G.: A cut finite element method with boundary value correction. Math. Comput. 87(310), 633–657 (2018)
Burman, E., Hansbo, P., Larson, M.G.: A cut finite element method with boundary value correction for the incompressible Stokes’ equations. In: Radu, F.A., Kumar, K., Berre, I., Nordbotten, J.M., Pop, I.S. (eds.) Numerical Mathematics and Advanced Applications ENUMATH 2017, pp. 183–192. Springer, Cham (2019)
Boiveau, T., Burman, E., Claus, S., Larson, M.: Fictitious domain method with boundary value correction using penalty-free Nitsche method. J. Numer. Math. 26(2), 77–95 (2018)
Main, A., Scovazzi, G.: The shifted boundary method for embedded domain computations. Part I: poisson and Stokes problems. J. Comput. Phys. 372, 972–995 (2018)
Main, A., Scovazzi, G.: The shifted boundary method for embedded domain computations. Part II: linear advection–diffusion and incompressible Navier–Stokes equations. J. Comput. Phys. 372, 996–1026 (2018)
Stenberg, R.: On some techniques for approximating boundary conditions in the finite element method. J. Comput. Appl. Math. 63(1–3), 139–148 (1995)
Johansson, A., Larson, M.G.: A high order discontinuous Galerkin Nitsche method for elliptic problems with fictitious boundary. Numer. Math. 123(4), 607–628 (2013)
Gilbarg, D., Trudinger, N.S.: Elliptic Partial Differential Equations of Second Order. Classics in Mathematics. Springer, Berlin (2001). Reprint of the 1998 edition
Stein, E.M.: Singular Integrals and Differentiability Properties of Functions. Princeton Mathematical Series, vol. 30. Princeton University Press, Princeton (1970)
Burman, E., Hansbo, P.: Deriving robust unfitted finite element methods from augmented Lagrangian formulations. In: Bordas, S.P.A., Burman, E., Larson, M.G., Olshanskii, M.A. (eds.) Geometrically Unfitted Finite Element Methods and Applications, pp. 1–24. Springer, Cham (2017)
Ben Belgacem, F., Maday, Y.: The mortar element method for three-dimensional finite elements. RAIRO Modél. Math. Anal. Numér. 31(2), 289–302 (1997)
Braess, D., Dahmen, W.: Stability estimates of the mortar finite element method for \(3\)-dimensional problems. East–West J. Numer. Math. 6(4), 249–263 (1998)
Kim, C., Lazarov, R.D., Pasciak, J.E., Vassilevski, P.S.: Multiplier spaces for the mortar finite element method in three dimensions. SIAM J. Numer. Anal. 39(2), 519–538 (2001)
Ern, A., Guermond, J.-L.: Finite element quasi-interpolation and best approximation. ESAIM Math. Model. Numer. Anal. 51(4), 1367–1385 (2017)
Acknowledgements
Open access funding provided by Jönköping University.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This research was supported in part by EPSRC, UK, Grant No. EP/P01576X/1, the Swedish Foundation for Strategic Research Grant No. AM13-0029, the Swedish Research Council Grants Nos. 2013-4708, 2017-03911, 2018-05262, and Swedish strategic research programme eSSENCE.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Burman, E., Hansbo, P. & Larson, M.G. Dirichlet boundary value correction using Lagrange multipliers. Bit Numer Math 60, 235–260 (2020). https://doi.org/10.1007/s10543-019-00773-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10543-019-00773-4