
Abstract
A universal algorithm for analyzing the stability of Euler–Bernoulli nanobeams with any support conditions, subjected to arbitrary conservative and nonconservative loads, has been shown. The analysis was carried out using exact solutions in each of the prismatic nanobeam segments. The study of the determinant of a homogeneous system of equations resulting from boundary conditions and continuity conditions at the contact points of the nanobeam elements was the basis for the analysis of its critical loads. The presented general algorithm was used to analyze the impact on critical loads of prestress nanobeams caused by conservative and nonconservative external surface loads.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The analysis of structures at a very small length scale is a topical and application-wise important area of interest of many researchers. In cases when the size of structures approaches the nanoscale, classical local continuum theories fail and it is necessary to use nonlocal theories to correctly describe the phenomena occurring in such structures. Various theories exist for describing nonlocal dependents with respect to strain [1] such as strain gradient theory, couple stress theory, modified couple stress theory or Eringen elasticity theory. In this paper, Eringen elasticity theory was considered for analyzing the stability of Euler–Bernoulli nanobeams.
Nanostructures can be defined as objects in which one of their dimensions is smaller than 100 nm. They consist of from several to several thousand atoms of various chemical elements, mainly carbon, iron, zinc, etc. [2]. The features of some nanostructures, such as elasticity, their high resistance to bending and thermal conductivity [3], mean that nanostructures are widely used in many fields of science and technology. The properties within a given nanostructure may change depending on which kinds of atoms are used, how the particular atoms are arranged, or what the ratio of the particular dimensions of a given structure is. Thus, by controlling the structure at the level of individual atomic molecules, scientists obtain various materials and systems with the desired mechanical and physical properties. Among nanostructures, nanobeams deserve special attention because of their wide use in engineering, i.e., as nanoactuators, nanosensors and electrochemical sensing systems as shown in the example works of Chowdhury et al. [4], Boisen et al. [5], Murmu and Adhikari [6] and Li et al. [7]. Eringen [8, 9] published one of the first and commonly used nonlocal theories which is also used in this paper. The Euler–Bernoulli, Timoshenko, Reddy and Levinson beam theories were reformulated in the works of Reddy [10], Reddy and Pang [11], and Reddy [12] using nonlocal constitutive relations formulated by Eringen, and used in analyses of the statics, dynamics and stability of beams with different boundary conditions, and also in the analysis of plates. In the subsequent years works appeared in which the already known beam equations were derived in alternative ways as in the work of Thai [13], nonlocal parameters were calibrated as in the work of Wang et al. [14], and nonlocality sources in the theory of nanobeams were sought as in the work of Sarkar and Reddy [15].
Beam statics, dynamics and stability problems in their nonlocal formulations are analyzed using analytical methods (the use of which is obviously limited to selected simple cases) and also several approximate methods. In works of Lu et al. [16], Reddy [10], Reddy and Pang [11], Li et al. [17], Wang et al. [14], Barretta and de Sciarra [18], the analytical approach was used to analyse mainly the vibrational frequencies and displacement states of nanobeams. Examples of works in which different approximate methods were used are published by: Chowdhury et al. [4]—the finite element method in the analysis of biosensor frequencies, Ansari et al. [19]—the finite difference method in the analysis the frequencies of nanobeams embedded in an elastic medium, Challamel et al. [20]—the rigid element method in the analysis of the statics and dynamics of microstructured beams, Behera and Chakraverty [21]—the Rayleigh–Ritz method with a base of orthogonal polynomials in the analysis of the frequencies and displacements of nanobeams, and Behera and Chakraverty [22]—the differential quadrature method in the analysis of the frequencies of beams with different boundary conditions. Wang and Feng [23], Farshi et al. [24], Eltaher et al. [25], Zhang and Lee [26] and Li et al. [27] focus much attention on surface effects which have a significant bearing on nanobeam solutions. As shown by: Zhang et al. [28], Ren and Zhao [29], Li and Peng [30], Heireche et al. [31], Heireche et al. [32], Ansari and Sahmani [33], Shen et al. [34], Stachiv et al. [35] thermal stress, thin films, a mismatch between different materials, and initial external axial loads can cause an initial stress state in nanobeams, which decidedly affects the results of their analysis.
The stability of nanobeams under conservative loading is the subject of works by: Kumar et al. [36], Zhang et al. [37], Mohammadi et al. [38] and Wang et al. [39] in which they were analyzed the influence of nonlocal parameters on the level of critical loads, postcritical states and the influence of different nanobeam boundary conditions on the solution. A large number of works on the analysis of nanobeams deal with nonconservative problems. The following problems were analyzed: the influence of the follower force on the solution by Singh et al. [40], Lazopoulos and Lazopoulos [41], Xiang et al. [42], Kazemi-Lari et al. [43], Atanackovic et al. [44] and Challamel et al. [45]; the flatter of the cantilever carbon nanotube conveying fluid by Yoon et al. [46]; cases in which the Eringen model may be nonself-adjoint by Challamel et al. [47] and the flatter instability of a cantilever with surface effects by Li et al. [27].
The aim of the present research was to create a universal algorithm for analyzing the stability of Euler–Bernoulli nanobeams with any support conditions, subjected to arbitrary conservative and nonconservative loads. The unique feature of the algorithm is that it makes it possible to analyse the influence of the axial effects (so far not taken into account in the literature on the subject) of segmental nonconservative loads with any follower parameters on the critical states of nanobeams. The loads can help to complete the description of problems relating to the stability of nanobeams with initial stress states caused by external forces. The algorithm uses the exact solutions of Euler–Bernoulli nanobeams and makes it possible to determine critical load levels with the desired accuracy.
Section 2 presents briefly the equations for the transverse vibrations of the Euler–Bernoulli beam with the Eringen model taken into account. Section 3 presents the algorithm for solving the stability problem. The functioning of the algorithm is illustrated with numerical examples in Sect. 4. The achieved effects are summed up, and several general conclusions are formulated in Sect. 5.
2 Problem formulation
The constitutive relations in classical elasticity theory formulations are algebraic dependences between stress tensors and strain tensors in each point of matter. In the nonlocal theory formulated by Eringen [8, 9], stress in a point is a weighted averaged function of strains in the whole analyzed body. This assumption leads to complicated mathematical models in the form of integral partial differential equations which are difficult to solve.
The Eringen model in the Euler–Bernoulli beam theory used here is based on a simplified nonlocal constitutive relation which in the one-dimensional case (along direction x of the beam’s longitudinal axis) assumes the form used, among others, in the works of Reddy [10], Reddy and Pang [11], Zhang et al. [37] and Wang et al. [38]:
where \(\sigma _{xx} \) is normal stress, \(\varepsilon _{xx} \)—normal strain, E—Young’s modulus and \(e_{0} a\)—a nonlocal parameter (the product of the internal characteristic length a, e.g., lattice parameter and granular distance, and the constant \(e_{0} \) experimentally determined for the analyzed material).
On the basis of the classical definition of the bending moment: \(M=\int \nolimits _A {\sigma _{xx} \;z\;\hbox {d}A} \) (z is a coordinate measured from the neutral axis of the cross section perpendicularly to the longitudinal axis of the beam while A is the cross-sectional area of the beam) and using the strain \((\varepsilon _{xx} )\)—displacement \((W\left( {x,\;t} \right) )\) (perpendicular to the longitudinal axis of the Euler–Bernoulli beam) relation in the form
one gets the following dependence between bending moment M and displacement W:
where I is the moment of inertia of the beam’s cross section and t is time.
Let us assume that the considered straight beam made of a material with density \(\rho \) is subjected to the action of static axial force N (sum of conservative F and nonconservative P axial load) and rests on a two-parameter \((r_\mathrm{w} ,\;c_\mathrm{w} )\) Pasternak elastic foundation. The reaction \(R\left( {x,t} \right) \) of the elastic foundation (or the elastic medium surrounding the nanobeam) is defined by the following equation, which, among others, was used by Ansari et al.\(^{\mathrm {16}}\):
The parameter \(r_\mathrm{w} \) is the Winkler modulus parameter corresponding to normal pressure, and \(c_\mathrm{w} \) is the Pasternak modulus parameter relevant to transverse shear stress. The parameters of this elastic medium are not dependent on the nonlocal beam parameters.
Considering harmonic vibration \(W\left( {x,t} \right) =w\left( x \right) \;e^{i\omega \;t}\) with frequency \(\omega \), from the conditions of equilibrium one gets the following equation for the beam’s transverse vibration:
The constants \(a^{0}\) and \(b^{0}\) in Eq. (5) have the form
where \({\overline{EI}} =EI-\left( {e_{0} a} \right) ^{2}\left( {N-2c_\mathrm{w} } \right) \), and \(m=\rho \!A\).
Key for the solution algorithm discussed in Sect. 3 are the following definitions of bending moment M and shear force Q in the nonlocal formulation of the Euler–Bernoulli beam theory:
The exact solutions of Eq. (5) are combinations of trigonometric and hyperbolic functions whose forms, depending on the correlations (stemming from nonlocal theory) between the values of the parameters \(a^{0}\) and \(b^{0}\), are described in detail in Glabisz’s [48] work devoted to the local theory of the Euler–Bernoulli beam. Those solutions (determined for four constants \(C_{1} ,\;C_{2} ,\;C_{3} \) and \(C_{4} \)) will be used in Sect. 4.
When the value zero of the nonlocal parameter \(e_{0} a\) is assumed, Eq. (5) with coefficients (6) and with boundary conditions is identical to the equation which is used in the analysis of beam systems with nonconservative forces that are described in classical elasticity theory [49]. Equation (5) can be derived from the Hamilton principle for systems with nonconservative forces, which together with imposed constraints takes the form of: \(\delta \mathop \smallint \nolimits _{{t_{0}}}^{t1} \left( {T-V+W_{nc} } \right) \hbox {d}t=0, \delta P=0\), \({\delta w}|_{t_{0}} =0,{\delta w}|_{t_{1}} =0\) [50, 51], where T is the kinetic energy of the system; V is the potential energy of the system that includes the work of forces at which there is a potential (F); \(W_{nc} \) is the work of non-potential forces (P); and t is time. Kazemi-Lari et al. [43], based on the above-mentioned Hamilton principle, formulated, considering the nonlocal Eringen theory of elasticity, an equation of the transverse vibrations of the Euler–Bernoulli nanobeam, which is located on an elastic foundation and subjected to nonconservative forces. This equation, when taking into account formula (4) given in this paper and the influence of conservative forces, is consistent with Eq. (5), which is presented in this paper, and the coefficients that are described by relation (6).
3 Solution algorithm
Let us assume that the stability problem for a segmental Euler–Bernoulli nanobeam with length l, consisting of any number of sections (Fig. 1), is analyzed. By the beam’s section, one should understand its prismatic segment between nodes the location of which can be defined by, e.g., the points of application of the axial load (conservative load F and nonpotential load P), the boundaries of the elastic foundation, the location of masses with negligible or non-negligible rotational inertia, the location of damped masses, the location of rotational or translational elastic supports, the limits of changes in material stiffness or density and changes in nonlocal material characteristics. The nonpotential load P is described using parameter \(\alpha (\alpha =0\) for dead, potential load and \(\alpha =1\) for strictly follower load) which Bolotin [52] introduced.

Beam diagram
If translational elastic reaction (S) with sprung mass action, inertial force (B), rotational elastic reaction \((M_{S} )\) and mass moment of rotational inertia \((M_{B} )\) are defined as
then after the moment and the shear force relation in the nonlocal formulation (7) is taken into account, the conditions of equilibrium (the sum of forces perpendicular to the axis of the beam and the sum of moments) on the nanobeam’s left end (\(i=L\), Fig. 2a) assume the form
where
and \((')\) denotes differentiation with respect to the variable x.

Diagram of nanobeam’s left (a) and right (b) end, and forces present
The conditions of equilibrium (the sum of forces perpendicular to the axis of the beam and the sum of moments), using the moment and the shear force relation in the nonlocal formulation (7), on the nanobeam’s right end (\(i=R\), Fig. 2b) at \(x=l\), are as follows
where

Diagram of contact between nanobeam segments, and forces present
The continuity conditions (for displacements and rotations determined from the relation (5) in the nonlocal parameters formulation (6)) and the equilibrium conditions—using the moment and the shear force relation in the nonlocal formulation (7)—in the places of contact between nanosegment “\(i-1\)” and nanosegment “i” (Fig. 3) have the form
where using the notations \({\overline{EI}}^{\left( + \right) }=EI^{\left( + \right) }-\left( {e_{0} a^{\left( + \right) }} \right) ^{2}\left( {N^{\left( + \right) }-2c_\mathrm{w}^{\left( + \right) }} \right) \) and \({\overline{EI}}^{\left( - \right) }=EI^{\left( - \right) }-\left( {e_{0} a^{\left( - \right) }} \right) ^{2}\left( {N^{\left( - \right) }-2c_\mathrm{w}^{\left( - \right) }} \right) \) the following holds true:
The characteristics of the left nanobeam segment (“\(i-1\)”) are denoted with (−) and those of the right nanobeam segment (“i”) with (\(+\)).
Using relations (9) and (11) and the number of relations (13) which follows from the number of nanobeam segment contacts, one gets a homogenous linear system of algebraic equations for integration constants C. In order for a nontrivial solution of this system to exist, the determinant of the matrix of its coefficients must be equal to zero. This condition makes it possible to determine the natural frequency of the analyzed system, and hence on the basis of the dynamic stability criterion used by Bolotin [52] and Leipholz [49], one can determine the critical load levels. The determinant of the homogenous system of equations is calculated in the nodes of a regular grid covering the analyzed frequency and load variation area. Then the determinant variation map zero contour lines, which determine the system’s vibration frequency variation curves, are plotted. The contour lines arbitrarily accurately determine the system’s vibration frequencies and the accuracy of the solution depends solely on the density of the grid adopted for the analyzed frequency and load variation area. In the case of nanobeams whose parameters vary along their length, the accuracy of the solution obviously also depends on the number of segments.
4 Numerical examples
The algorithm was tested on, i.e., the solutions of the Beck and Leipholz problem (at \(e_{0} a=0\)), known from the literature on the subject and full agreement between the respective results was obtained. It should be noted that when the axial (conservative or nonconservative) force varies along the nanobeam’s length or when the other characteristics of the nanobeam are variable, one should use such a number of segments which will make it possible to satisfactorily describe these quantities with segmentally constant functions. The modeling of the different ways of support consists in assuming proper constants characterizing the stiffness of the nodal translational and rotational elastic constraints. For example, rigid fixing is modelled by a translational spring and a rotational spring, with infinitely great (in the numerical sense) stiffness. The algorithm constructed in this way enables the analysis of the stability problem for nanobeams with all the variable-along-beam-length parameters occurring in the descriptions of the segments, at any support conditions. The duration of computations yielding graphs of frequency versus load level is a function of the number of segments and the density of the grid covering the analyzed area of frequencies and forces.
The algorithm was tested for different values \(\tau =e_{0} a/l\in \left\langle {0.0;0.25} \right\rangle \) of the dimensionless nonlocal parameter. In this range of variation of \(\tau \), the nonlocal parameter \(e_{0} a\) for single wall carbon nanotubes is less than 2 nm as in Barretta and de Sciarra’s [18] work, in which a larger range of \(\tau \) was analyzed. Nanobeam vibration frequency values obtained using this algorithm were found to be in perfect agreement with the ones reported in the work by Wang et al. [53], where \(\tau =e_{0} a/l\in \left\langle {0.0;0.7} \right\rangle \) was analyzed, but without taking into account axial forces. The question of which values for the nonlocal parameter \(e_{0} a\) should be adopted is still finally an unresolved issue, as evidenced by the works of Wang et al. [14], Sarkar and Reddy [15] and Wang et al. [39] quoted in the introduction. Here, only the adopted range of the dimensionless nonlocal parameter was analyzed, although the algorithm allows this parameter to depend for example on axial forces or vibration frequency, but this was not the purpose of this work.
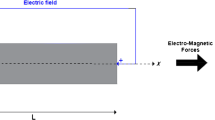
The effect of the nonconservative surface loading of the beams, whose field of action is defined by dimensionless parameters \(X_{0} =x_{0} /l\) and \(R_{0} =r_{0} /l\) (Fig. 4), on their critical loads was studied.

Diagram showing location of nanobeam area under action of nonconservative surface loading

Surfaces of critical loads \(N_{cr,0} \) of cantilever nanobeams versus follower parameters \(\alpha \) and load ranges \(R_{0} \) at different dimensionless nonlocal parameters

Surfaces of critical loads \(N_{cr,0} \) of rigidly stiff nanobeam versus follower parameters \(\alpha \) and load ranges \(R_{0} \) at different dimensionless nonlocal parameters
Figures 5 and 6 show the surfaces of critical dimensionless loads \(N_{cr,0} =N\;l^{2}/EI\) of, respectively, the cantilever beam and the rigidly stiff nanobeam at: different values of parameter \(\tau =e_{0} a/l\), a constant value of \(X_{0} =1/2\), different load ranges \(R_{0} \) and different values of follower parameter \(\alpha \). When selecting values of the dimensionless nonlocal parameter \(\tau \) to be analyzed one should pay attention to possible singularities of constants (6) in Eq. (5), due to the value of \({\overline{EI}} \). The loads at which the nanobeams would lose their stability as a result of flutter are marked with black dots while the critical divergence loads are marked with grey dots. The surfaces of the critical loads of the rigidly stiff nanobeam under nonconservative loading with constant range \(R_{0} =0.2\) at different locations \(X_{0} \) of the surface tension forces and different follower parameters \(\alpha \) are shown in Fig. 7. The critical load levels and the character of instability principally depend on the values of the nonlocal parameters, and also on the values of the follower parameters and those of the parameters defining the location and extent of the areas under surface tension. As the nonlocal parameter value increases, the critical loads of the nanobeams decrease significantly.

Surfaces of critical loads \(N_{cr,0} \) of rigidly hinged nanobeam versus follower parameters \(\alpha \) and location \(X_{0} \) of surface load with constant range at different dimensionless nonlocal parameters

Exemplary map of dependence between frequency \(\Omega _{0} \) and load level \(N_{0} \) of cantilever beam at \(X_{0} =0.1\) and \(\alpha =0.6\)
An exemplary, more interesting graph of the dependence between \(\Omega _{0} =\omega \sqrt{ml^{4}/EI} \) and load level \(N_{0} =N\;l^{2}/EI\) at \(E_{0} a=0\) for the cantilever beam (at \(X_{0} =0.1\) and \(\alpha =0.6)\) is shown in Fig. 8. Here the 3rd and 4th vibration frequencies of the system, and not the two lowest frequencies which is usually the case, determine the critical level of the flatter load. An analysis of such graphs provided the basis for constructing the critical load surfaces presented in this paper.

Surfaces of critical loads \(N_{cr,0} \) of cantilever nanobeam versus elastic foundation parameters \(R_\mathrm{w} \) and \(C_\mathrm{w} \) at \(\alpha =0.5\) and different dimensionless nonlocal parameters
Figure 9 shows the influence of elastic foundation parameters \(R_\mathrm{w} =r_\mathrm{w} \;l^{4}/EI\) and \(C_\mathrm{w} =c_\mathrm{w} \;l^{3}/EI\) on the stability of the cantilever nanobeam under the action of a follower force constant along the whole beam length at parameter \(\alpha =0.5\) and different nonlocal parameter values.
5 Conclusions
This paper has presented an algorithm for analyzing the stability of Euler–Bernoulli nanobeams via the Eringen nonlocal formulation. Using the exact solutions in each of the nanobeam’s segments as well as the equilibrium conditions and the kinematic consistency conditions on the nanobeam’s ends and at the contacts between its segments, one gets a homogenous system of algebraic equations which for the adopted frequency and load grid enables one to track the system vibration frequencies. Thanks to this algorithm formulation, one can investigate, using the dynamic stability criterion, nanobeam stability problems at any support conditions, any distributions of nanobeam characteristics and surface conservative and nonconservative loads. Nanobeam parameter functions, which can be arbitrary along the beam’s length, and the loads are approximated by segmentally constant functions within each of the nanobeam’s segments. The accuracy of the results depends solely on the number of segments into which the nanobeam is divided and on the density of the discrete grid adopted for the observed frequency-load space.
The generally formulated algorithm can be used to analyse a wide class of problems such as identification the nonlocal effects of a nanobeam by the shifts of resonant frequencies or analysis of the frequency sensitivity to the changes in masse characterized by negligible or not negligible rotational inertia. The proposed algorithm can be effectively implemented in analysis cracked micro and nanobeams under axial loading. It is also possible to analyze nanobeams with variable geometric and material characteristics, including various value non-local parameters along the length of the beam.
This algorithm was used here to analyse the stability of nanobeams under static nonconservative loading. Nonconservative loading at different follower parameter values and different action ranges makes it possible to generalize the existing surface load models.
From the numerical analysis of the stability of the selected nanobeams under nonconservative loading, one can draw several conclusions:
-
at different follower parameters the description of the forces caused by surface tension has a key bearing on the critical load values and the character of instability (flutter, divergence);
-
the critical load value and the character of instability are a function of the range of the surface load and its location along the nanobeam’s axis, and mainly of the values of the nonlocal parameters;
-
the values of the parameters characterizing the elastic medium surrounding the nanobeam significantly affect the values of critical loads and the character of their instability.
References
Demir, Ç., Civalek, Ö.: On the analysis of microbeams. Int. J. Eng. Sci. 121, 14–33 (2017)
Karlicić, D., Murmu, T., Adhikari, S., McCarthy, M.: Non-local Structural Mechanics. ISTE and John Wiley and Sons, New York (2015)
Saito, R., Dresselhaus, G., Dresselhaus, M.S.: Physical properties of carbon nanotubes. Imperial, College Press, London (1998)
Chowdhury, R., Adhikari, S., Mitchell, J.: Vibrating carbon nanotube based bio-sensors. Physica E 42, 104–109 (2009)
Boisen, A., Dohn, S., Keller, S.S., Schmid, S., Tenje, M.: Cantilever-like micromechanical sensors. Rep. Prog. Phys. 74, 036101 (2011)
Murmu, T., Adhikari, S.: Nonlocal frequency analysis of nanoscale biosensors. Sens. Actuators A 173, 41–48 (2012)
Li, X.F., Tang, G.J., Shen, Z.B., Lee, K.Y.: Resonance frequency and mass identification of zeptogram-scale nanosensor based on the nonlocal theory. Ultrasonics 55, 75–84 (2015)
Eringen, A.C.: On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J. Appl. Phys. 54, 4703–4710 (1983)
Eringen, A.C.: Nonlocal Continuum Field Theories. Springer, New York (2002)
Reddy, J.N.: Nonlocal thories for bending, buckling and vibration of beams. Int. J. Eng. Sci. 45, 288–307 (2007)
Reddy, J.N., Pang, S.D.: Nonlocal continuum theories of beams for the analysis of carbon nanotubes. J. Appl. Phys. 103, 023511 (2008)
Reddy, J.N.: Nonlocal nonlinear formulations for bending of classical and shear deformation theories of beam and plates. Int. J. Eng. Sci. 48, 1507–1518 (2010)
Thai, H.T.: A nonlocal beam theory for bending, buckling and vibration of nanobeams. Int. J. Eng. Sci. 52, 56–64 (2012)
Wang, C.M., Zhang, Z., Challamel, N., Duan, W.H.: Calibration of Eringen’s small length scale coefficient for initially stressed vibrating nonlocal Euler Beams based on microstructured beam model. J. Phys. D Appl. Phys. 46, 345501 (2013)
Sarkar, S., Reddy, J.N.: Exploring the source of non-locality in the Euler–Bernoulli and Timoshenko beam models. Int. J. Eng. Sci. 104, 110–115 (2016)
Lu, P., Lee, H.P., Lu, C., Zhang, P.Q.: Application of nonlocal beam models for carbon nanotubes. Int. J. Solids Struct. 44, 5289–5300 (2007)
Li, C., Lim, C.W., Yu, J.L., Zeng, Q.C.: Analytical solutions for vibration of simple supported nonlocal nanobeams with an axial force. Int. J. Struct. Stab. Dyn. 11(2), 257–271 (2011)
Barretta, R., de Sciarra, F.M.: Analogies between nonlocal and local Bernoulli–Euler nanobeams. Arch. Appl. Mech. 85, 89–99 (2015)
Ansari, R., Gholami, R., Hosseini, K., Sahmani, S.: A sixth-order compact finite difference method for vibrational analysis of nanobeams embedded in an elastic medium based on nonlocal beam theory. Math. Comput. Model. 54, 2577–2586 (2011)
Challamel, N., Wang, C.M., Elishakoff, I.: Discrete systems behave as nonlocal structural elements: bending, buckling and vibration analysis. Eur. J. Mech. A/Solids 44, 125–135 (2014)
Behera, L., Chakraverty, S.: Free vibration of Euler and Timoshenko nanobeams using boundary characteristic orthogonal polynomials. Appl. Nanosci. 4, 347–358 (2014)
Behera, L., Chakraverty, S.: Application of differential quadrature method in free vibration analysis of nanobeams based on various nonlocal theories. Comput. Math. Appl. 69, 1444–1462 (2015)
Wang, G., Feng, X.: Effects of surface elasticity and residual surface tension on the natural frequency of microbeams. Appl. Phys. Lett. 90, 231904 (2007)
Farshi, B., Assadi, A., Alinia-ziazi, A.: Frequency analysis of nanotubes with consideration of surface effects. Appl. Phys. Lett. 96, 093105 (2010)
Eltaher, M.A., Mahmoud, F.F., Assie, A.E., Meletis, E.I.: Coupling effects of nonlocal and surface energy on vibration analysis of nanobeams. Appl. Math. Comput. 224, 760–774 (2013)
Li, X., Zhang, H., Lee, K.Y.: Dependence of Young’s modulus of nanowires on surface effect. Int. J. Mech. Sci. 81, 120–125 (2014)
Li, X., Zou, J., Jiang, S., Lee, K.Y.: Resonant frequency and flutter instability of nanocantilever with the surface effects. Compos. Struct. 153, 645–653 (2016)
Zhang, Y., Ren, Q., Zhao, Y.: Modelling analysis of surface stress on a rectangular cantilever beam. J. Appl. Phys. D Appl. Phys. 37, 2140–2145 (2004)
Ren, Q., Zhao, Y.P.: Influence of surface stress on frequency of microcantilever-based biosensors. Microsyst. Technol. 10, 307–314 (2004)
Li, X., Peng, X.: Theoretical analysis of surface stress for a microcantilever with varying widths. J. Appl. Phys. D Appl. Phys. 41, 065301 (2008)
Heireche, H., Tounsi, A., Benzair, A.: Scale effect on wave propagation of double-walled carbon nanotubes with initial axial loading. Nanotechnology 19, 185703 (2008)
Heireche, H., Tounsi, A., Benzair, A., Mechab, I.: Sound wave propagation in single-walled carbon nanotubes with initial axial stress. J. Appl. Phys. 104, 014301 (2008)
Ansari, R., Sahmani, S.: Bending behavior and buckling of nanobeams inclding surface stress effects corresponding to different beam theories. Int. J. Eng. Sci. 49, 1244–1255 (2011)
Shen, Z., Tang, G., Zhang, L., Li, X.: Vibration of double-walled carbon nanotubes based nanomechanical sensor with initial axial stress. Comput. Mater. Sci. 58, 51–58 (2012)
Stachiv, I., Zapomel, J., Chen, Y.L.: Simultaneous determination of the elastic modulus and density/thickness of ultrathin films utilizing micro-/nanoresonators under applied axial force. J. Appl. Phys. 115, 124304 (2014)
Kumar, D., Heinrich, Ch., Waas, A.M.: Buckling analysis of carbon nanotubes modeled using nonlocal continuum theories. J. Appl. Phys. 103, 073521 (2008)
Zhang, Y.Y., Wang, C.M., Challamel, N.: Bending, buckling and vibration of micro/nanobeams by hybrid nonlocal beam model. J. Eng. Mech. 136(5), 562–574 (2010)
Mohammadi, H., Mahzoon, M., Mohammadi, M., Mohammadi, M.: Postbuckling instability of nonlinear nanobeam with geometric imperfection embedded in elastic foundation. Nonlinear Dyn. 76, 2005–2016 (2014)
Wang, C.M., Zhang, H., Challamel, N., Duan, W.H.: On boundary conditions for buckling and vibration of nonlocal beams. Eur. J. Mech. A/Solids 61, 73–81 (2017)
Singh, A., Mukherjee, R., Turner, K., Show, S.: MEMS implementation of axial and follower end forces. J. Sound Vib. 286, 637–644 (2005)
Lazopoulos, K.A., Lazopoulos, A.K.: Stability of a gradient elastic beam compressed by non-conservative force. Z. Angew. Math. Mech. 90(3), 174–184 (2010)
Xiang, Y., Wang, C.M., Kitipornchai, S., Wang, Q.: Dynamic instability of nanorods/nanotubes subjected to an end follower force. J. Eng. Mech. 136(8), 1054–1058 (2010)
Kazemi-Lari, M.A., Fazelzadeh, S.A., Ghavanloo, E.: Non-conservative instability of cantilever carbon nanotubes resting on viscoelasic foundation. Physica E 44, 1623–1630 (2012)
Atanackovic, T.M., Bouras, Y., Zorica, D.: Nano- and viscoelastic Beck’s column on elastic foundation. Acta Mech. 226, 2335–2345 (2015)
Challamel, N., Kocisis, A., Wang, C.M., Lerbet, J.: From Ziegler to Beck’s column: a nonlocal approach. Arch. Appl. Mech. 86, 1095–1118 (2016)
Yoon, J., Ru, C.Q., Mioduchowski, A.: Flow-induced flutter instability of cantilever carbon nanotubes. Int. J. Solids Struct. 43, 3337–3349 (2006)
Challamel, N., Zhang, Z., Wang, C.M., Reddy, J.N., Wang, Q., Michelitsch, T., Collet, B.B.: On nonconservativeness of Eringen’s non;ocal elasticity in beam mechanics: corrections from a discrete-based approach. Arch. Appl. Mech. 84, 1275–1292 (2014)
Glabisz, W.: Stability of non-prismatic rods subjected to non-conservative loads. Comput. Struct. 46, 479–486 (1993)
Leipholz, H.H.E.: Stability Theory. An Introduction to the Stability Problems of Elastic Systems and Rigid Bodies. Wiley, Stuttgard (1987)
Barsoum, R.S.: Finite element method applied to the problem of stability of a non-conservative system. Int. J. Numer. Methods Eng. 3(1), 63–87 (1971)
Glabisz, W.: The role of Hamilton’s law and Hamilton ‘s principle on the analysis of nonconservative systems. Arch. Civ. Eng. 39(3), 255–273 (1993)
Bolotin, V.V.: Nonconservative Problems of the Theory of Elastic Stability. Pergamon Press, Oxford (1963)
Wang, C.M., Zhang, Y.Y., He, X.Q.: Vibration of nonlocal Timoshenko beams. Nonotechnology 18, 105401 (2007)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Glabisz, W., Jarczewska, K. & Hołubowski, R. Stability of nanobeams under nonconservative surface loading. Acta Mech 231, 3703–3714 (2020). https://doi.org/10.1007/s00707-020-02732-5
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-020-02732-5