
Abstract
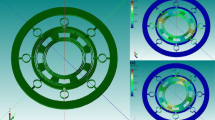
This work presents the analysis of a ring-type motion sensor which can sense the angular rate about the three axes besides the three components of linear acceleration. It integrates the functions of three-axis gyroscope and three-axis accelerometer. The design of the sensor is based on a vibrating ring shell structure. Translational modes of the ring are used to sense acceleration, and flexural modes are used to detect angular rates. Derivation of the equations of motion of the sensor using a Lagrangian method is detailed, and final expressions for the sensor’s sensitivity are obtained and verified by finite element analysis.






Similar content being viewed by others

Abbreviations
- \(\vec{u}\) :
-
Vibration-induced displacement of ring shell due to excitation of different modes
- \(p\) :
-
Independent spatial coordinate(s)
- \(q_{i} \left( t \right)\) :
-
Generalized (modal) coordinates as a function of time
- \(\varphi_{i} (p)\) :
-
Ring mode shapes
- Xo Yo Zo :
-
Inertial frame of reference
- X Y Z:
-
Translating and rotating (non-inertial) frame of reference
- \(\overrightarrow {U}_{arb}\) :
-
Position of a point on the ring structure relave to the inertial frame (Xo Yo Zo)
- \(\vec {r}_{o}\) :
-
Position vector from the origin of the inertial frame to the origin of the non-inertial frame
- \(\vec {r}_{p}\) :
-
Position vector from the center of the ring structure to a point on the undeformed ring
- \(\vec{u}_{T} ,\vec{u}_{F}\) :
-
Displacements of the center and a point on the ring structure due to translation and flexure respectively
- \(\vec {v}_{p}\) :
-
The velocity of a point on the ring
- \(\vec{\varOmega }\) :
-
Applied rate of turn
- \(C_{{r,\theta_{k} }}\) :
-
Capacitance of the electrodes located radially around the ring shell
- \(C_{{z,\theta_{k} }}\) :
-
Capacitance of the electrodes under the ring shell
- \({\text{R}}_{\text{ring}}\) :
-
Radius of the ring’s centre line in the unstressed stat
- \({\text{W}}_{\text{ring}}\) :
-
Thickness of the ring shell
- \({\text{h}}_{\text{ring}}\) :
-
Height of the ring structure
- \({\text{g}}_{\text{r}}\) :
-
Initial gap between a radial electrode and the ring structure
- \({\text{g}}_{\text{z}}\) :
-
Initial vertical gap between a bottom electrode and the ring structure
- \(\Delta \theta_{i}\) :
-
Electrode arc angle
- \(u_{r}(\theta) ,\,u_{z}(\theta)\) :
-
In-plane and out-of-plane displacements of the ring structure
References
Ayazi F, Najafi K (2001) A HARPSS polysilicon vibrating ring gyroscope. J Microelectromech Syst 10(2):169–179
Becker RA (1992) Introduction to theoretical mechanics. McGraw-Hill Book Company, USA
Chieng WH, Wenga JH, Laib JM (2004) Structural design and analysis of micromachined ring-type vibrating sensor of both yaw rate and linear acceleration. Sensors Actuators A 117(2):230–240
Cho JY (2012) ‘High-performance micromachined rate- and rateintegrating gyroscopes’. Ph.D Thesis, Electrical Engineering, University of Michigan
El-Sayed AM, Ghoneima M, Mahmoud MA (2013) ‘Modeling of nonlinearities in vibratory ring gyroscopes’. In: Second International Japan-Egypt Conference on Electronics, Communications and Computers, 6th of October City, 17–19 December
Fang WA, Cheng CW, Sun CM, Wang C, Tsai MH, Liu YC (2011) ‘A 400 × 400 μm2 3-axis CMOS-MEMS accelerometer with vertically integrated fully-differential sensing electrodes’. In: 16th International Conference of Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Beijing, 5–9 June
Frank R (2011) 6DoF sensors improve motion sensing applications. http://www.designworldonline.com/6dof-sensors-improve-motion-sensing-applications. Accessed 24 Mar 2014
Fujiyoshi M, Funabashi H, Yamada H, Esashi M, Akashi T, Hata Y, Nonomura Y (2011) ‘An SOI 3-axis accelerometer with a zigzagshaped Z-electrode for differential detection’. In: Solid-State Sensors, Actuators and Microsystems Conference (TRANSDUCERS), Beijing, 5–9 June
Gallacher BJ, Burdess JS, Harris AJ, McNie ME (2001) The principles of a three axis vibrating gyroscope. IEEE Trans. Aerosp Electron Syst 37(4):1333–1343
Gallacher B et al (2005) Electrostatic correction of structural imperfections present in a microring gyroscope. J Microelectromech Syst 14(2):221–234
Hao Z, Ayazi F (2005) ‘Thermoelastic damping in flexural-mode ring gyroscopes’. In: 2005 ASME International Mechanical Engineering Congress and Exposition, pp 335–343
Johnson R (2011) GPS system with IMUs tracks first responders. http://www.eetimes.com/document.asp?doc_id=1259727. Accessed 8 Apr 2014
Kaajakari V (2009) Practical MEMS. Small Gear Publishing, Las Vegas
Kourepenis A, Barbour N, Ward P, Hopkins R (2011) Inertial MEMS system applications. NATO RTO Lecture Series, France
Putty MW (1995) ‘A Micromachined Vibrating Ring Gyroscope’. In: PhD Thesis, Electrical Engineering, University of Michigan
Sedky SM, Elshurafa AM, Khirallah K, Tawfik HH, Emira A, Abdel Aziz AK (2011) Nonlinear dynamics of spring softening and hardening in folded-MEMS comb drive resonators. J Microelectromech Syst 20(4):943–958
Yi CH, Ming CY, Weileun F, Chia PH (2010) ‘A novel SOI based single proof-mass 3-axis accelerometer with gapclosing differential capacitive electrodes in all sensing directions’. IEEE Sensors, pp 1188–1191
Yoon S, Lee S, Najafi K (2011) Vibration sensitivity analysis of MEMS vibratory ring gyroscopes. Sensors Actuators A 171(2):163–177
Zhongjian X, Honglong C, Yong Y, Xiaoqing L, Pingwei Z, Weizheng Y (2012) ‘Design and fabrication of a vortex inertial sensor consisting of 3-DOF gyroscope and 3-DOF accelerometer’. In: 2012 IEEE 25th International Conference on Micro Electro Mechanical Systems (MEMS), Paris, 29 January–2 Feberuary
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Abdul-wahed, A.M., Mahmoud, M.A.E. Vibratory ring six-axis motion sensor. Microsyst Technol 21, 2133–2144 (2015). https://doi.org/10.1007/s00542-014-2308-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-014-2308-3